Wybrane charakterystyki układów
drgających
Marcin Graba
POLITECHNIKA ŚWIĘTOKRZYSKA W KIELCACH
WYDZIAŁ
MECHATRONIKI I BUDOWY MASZYN
KATEDRA PODSTAW KONSTRUKCJI MASZYN
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
Cel ćwiczenia
•
Definicja drgań
wg Newton’a
•
Drgania w codzienności –
zalety i wady
•
Ogólna metoda pomiaru drgań
•
Przetworniki drgań
mechanicznych
•
Przetworniki mechaniczno-elektryczne i nieelektryczne
•
Przetwornik indukcyjny
•
Przetwornik potencjometryczny dwustronny
•
Drgania belki bez tłumienia
•
Drgania belki ze słabym tłumieniem
•
Drgania belki z tłumieniem krytycznym
•
Drgania belki z tłumieniem nadkrytycznym
•
Wykonanie ćwiczenia
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
Definicja drgań
wg Newton’a
Jest to taki
proces, w którym
jakakolwiek
wielkość
fizyczna
charakteryzująca
ten proces
doznaje kolejno
wzrostu i
obniżania swej
wartości w funkcji
pewnej innej
wielkości, którą
zazwyczaj jest
czas.
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
Definicja drgań
wg Newton’a
Jest to taki
proces, w którym
jakakolwiek
wielkość
fizyczna
charakteryzująca
ten proces
doznaje kolejno
wzrostu i
obniżania swej
wartości w funkcji
pewnej innej
wielkości, którą
zazwyczaj jest
czas.
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
Drgania w codzienności –
zalety i wady
•
w
odlewnictwie
stosuje się
wibrujące platformy (jeśli kadź
z roztopionym metalem postawimy na
platformie to drgania kadzi sprzyjają
wydzielaniu gazu i oddzieleniu żużli); w transporcie znane
są
od dawna przenośniki wibracyjne;
•
w budownictwie stosowane są
urządzenia wykorzystujące drgania do zagęszczania, mieszania,
formowania i wybijania mas formierskich, wbijania pali, mielenia
czy ubijania;
najpopularniejszym obecnie przyrządem wykorzystującym opisywane zjawisko jest młot
pneumatyczny oraz jego liczne hybrydy jak przecinaki, nitowniki,
kilofy;
•
w budowie maszyn drgania wykorzystywane są
w urządzeniach do polerowania (szlifierka
oscylacyjna) i docierania;
•
w naszym laboratorium spotkaliśmy się
już
z drganiami; służyły one do zainicjowania w
próbkach pęknięcia zmęczeniowego;
•
innym przykładem zastosowania drgań
mechanicznych jest metoda wyznaczania momentu
bezwładności metodą
wahadła trójnitkowego, jak też
badania zdolności tłumienia drgań;
•
statystyka wykazuje, że około 70-80% pęknięć
i
awarii
w maszynach jest wynikiem właśnie
drgań;
•
co jakiś
czas gdzieś
na świecie pojawia się
trzęsienie ziemi -
spektakularny przykład
katastrofalnego wpływu drgań;
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
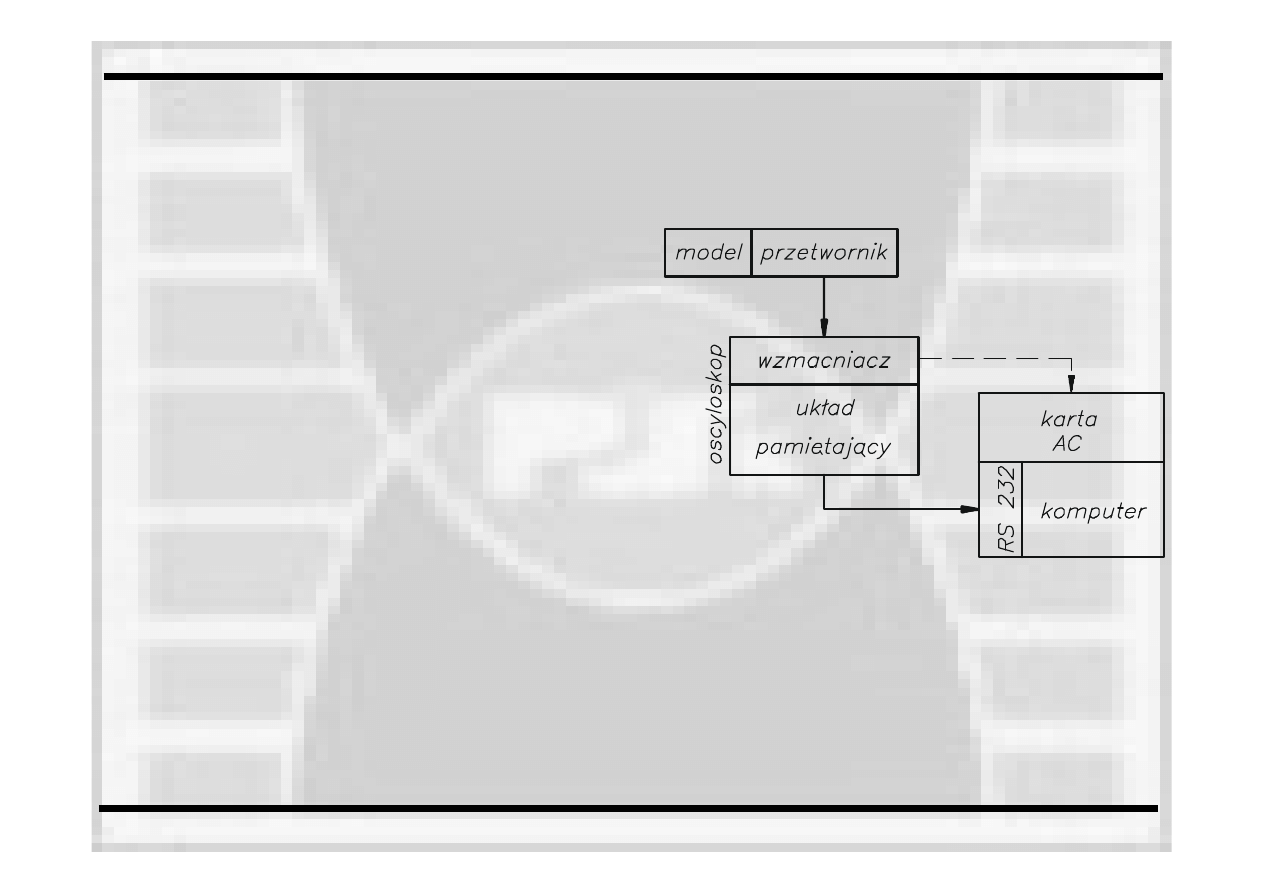
Ogólna metoda pomiaru drgań
Wykorzystywany w laboratorium model do
pomiaru drgań, zawiera przetwornik, który
zamieni drgania układu na sygnały elektryczne.
Sygnały te z kolei muszą
być
wzmocnione do
odpowiedniego poziomu i zapamiętane. Te dwie
funkcje w naszym układzie spełnia oscyloskop.
Jest to bardzo korzystne rozwiązanie, gdyż
umożliwia zapamiętanie szybkozmiennych w
czasie sygnałów. Dla wolniejszych przebiegów
zamiast oscyloskopu wykorzystujemy kartę
AC
i komputer. Sygnał
z oscyloskopu przesyłany
jest do komputera za pomocą
portu
szeregowego RS232 i programu sterującego
połączeniem oscyloskop-komputer.
Pomiar drgań
przeprowadza się
w dwóch etapach. Pierwsza część, to analiza geometryczna polegająca
na wyznaczeniu postaci drgań
ich charakteru, punktów, które przy danej postaci nie biorą
udziału w
drganiach oraz tych o największej amplitudzie drgań. W drugiej fazie przeprowadza się
analizę
czasową,
tzn. bada się
zmienność
poszczególnych wielkości (przemieszczenia liniowego i kątowego, odkształcenia
wzdłużnego i poprzecznego) w czasie oraz ich pierwszych i drugich pochodnych.
Jeśli zmiany są
okresowe, to należy wyznaczyć
parametry tych zmian (np.:
częstość, współczynnik
tłumienia), zaś
w przypadku przebiegu nieustalonego należy opisać
je statystycznie.
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
Przetworniki drgań
mechanicznych
Czujnik umożliwiający zamianę
sygnału mechanicznego (np. przemieszczenia) na sygnał
elektryczny (np. napięcie) jest najważniejszym elementem całego układu. Od jego
właściwości zależy wynik pomiarów. Zależnie od zjawiska wykorzystywanego w procesie
przetwarzania sygnałów można przetworniki można podzielić
na kilka grup.
Generujące
Parametryczne
*
Indukcyjne:
*
Elektrodynamiczne
*
Elektromagnetyczne
*
Piezoelektryczne
*
Fotoelektryczne zaworowe
*
Elektrolityczne
*
Elektrokinetyczne
*
Indukcyjne
*
Dławikowe
*
Transformatorowe
*
Pojemnościowe
*
Fotoelektryczne z efektem zewn. i wewn.
*
Oporowe
*
Potencjometryczne
*
Oporowo-węglowe
*
Tensometryczne
*
Elektronowe
*
Akustyczne
*
Ultradźwiękowe
*
Magnetosprężyste
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
Przetworniki mechaniczno-elektryczne
i nieelektryczne
Przetworniki mechaniczno-elektryczne cyfrowe mają
przewagę
nad przetwornikami
nieelektrycznymi dzięki wielu zaletom, do których zaliczamy:
•
wysoka jakość
zapisu (sygnał
nie jest zakłócony przez urządzanie zapamiętująco-
rejestrujące, którym w przypadku przetworników mechanicznych analogowych jest
pisak),
•
możliwość
wzmacniania i przekształcania sygnału,
•
zwartość
budowy i mały ciężar (jest to bardzo ważne, gdyż
zapobiega to
powstawaniu dodatkowych znacznych co do wartości sił
bezwładności),
•
możliwość
działania na odległość
(przetwornik jest oddzielony od pozostałych
elementów układu pomiarowego i może być
sterowany poprzez przewody lub drogą
radiową),
•
możliwość
jednoczesnej rejestracji sygnałów z kilku czujników,
•
wysoka niezawodność,
•
łatwy montaż
i obsługa.
Powyższe zalety spowodowały wyparcie wszelkich przyrządów zarówno mechanicznych jak
i optycznych, choć
te ostatnie dzięki rozwojowi techniki są
często wykorzystywane w
technice laboratoryjnej.
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
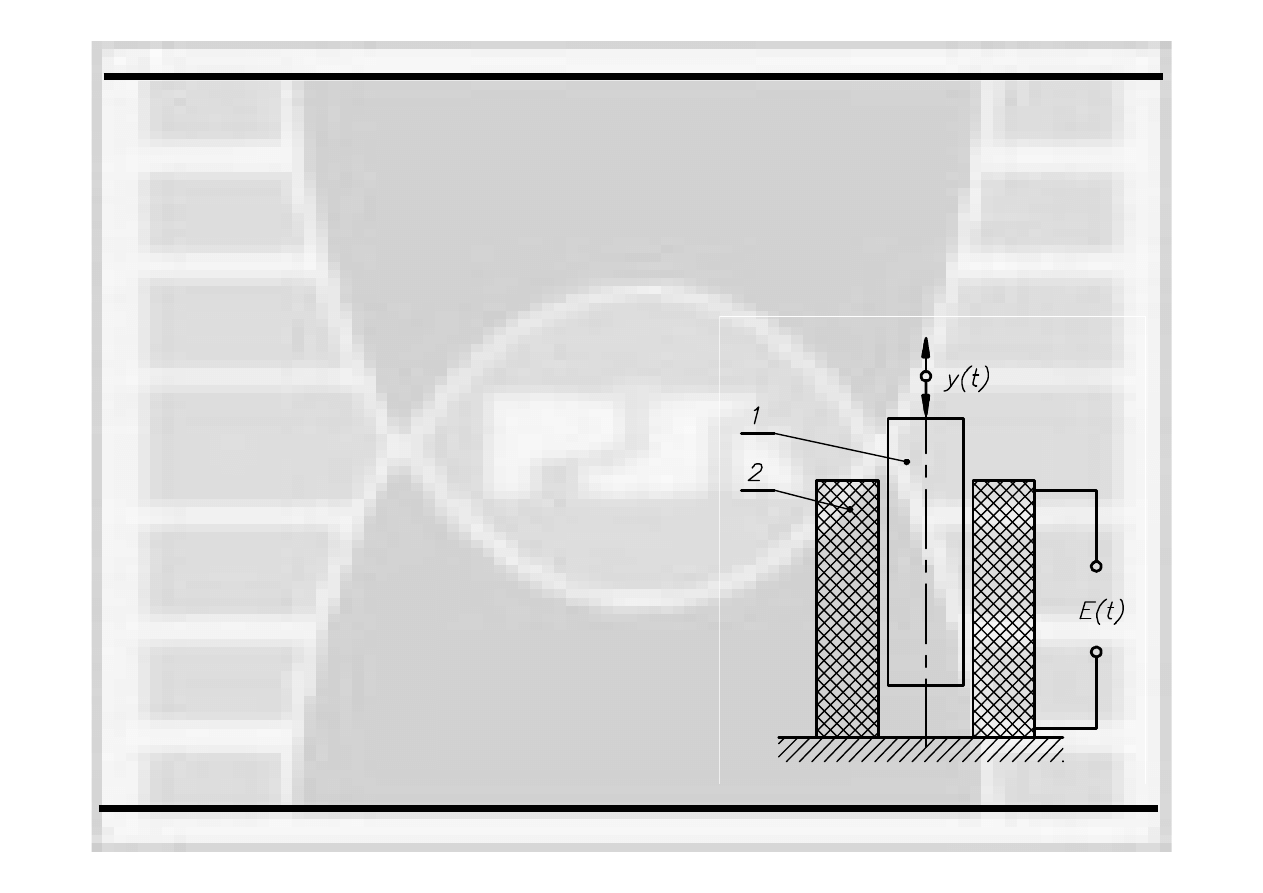
Przetwornik indukcyjny
•
magnes trwały 1, poruszając się
wewnątrz
nieruchomej cewki 2, indukuje w obwodzie
cewki napięcie zmienne, którego znak zależy od
kierunku ruchu rdzenia, a wartość
od położenia
rdzenia względem cewki;
•
w
pewnych
sytuacjach zamiast rdzenia porusza
się
cewka;
•
podobną
budowę
i
sposób
działania ma czujnik
bierny, ale tu rdzeń
jest po prostu
przewodnikiem elektryczności (np.żelazo), a
układ wymaga źródła zasilania;
•
położenie rdzenia wpływa na wartość
indukcyjności, a przez to na wartość
napięcia
wyjściowego czujnika;
Zasada działania przetwornika indukcyjnego czynnego (w czasie pracy wytwarza
sygnał
-
zmienną
w czasie siłę
elektromotoryczną):
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
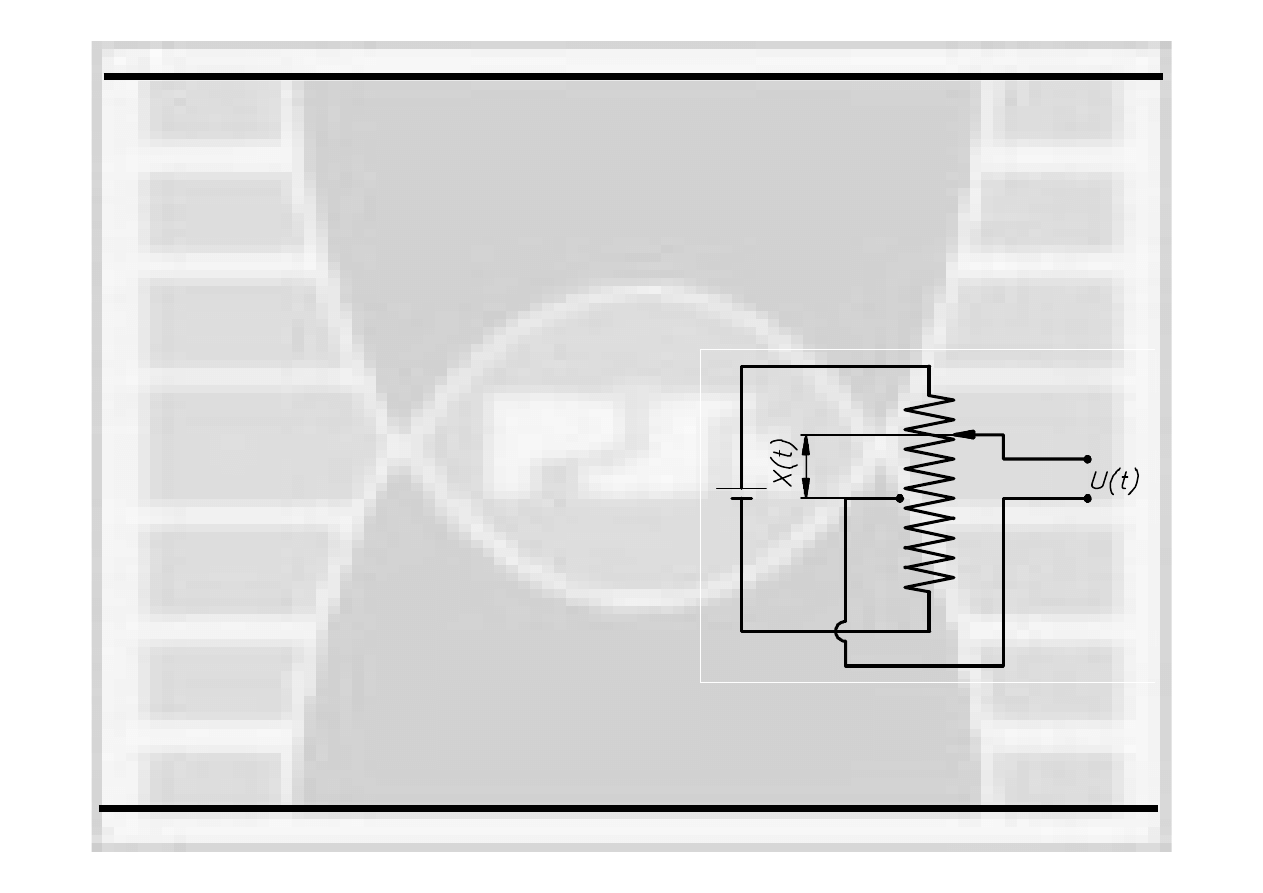
Przetwornik potencjometryczny
dwustronny
•
nadają
się
one do pomiaru amplitudy drgań
rzędu 1cm i częstotliwości do 10 Hz;
•
podstawowym elementem układu jest element
oporowy z suwakiem;
•
od położenia suwaka na elemencie oporowym
zależy wartość
napięcia odbieranego przez
dalszą
część
układu;
•
do grupy przetworników oporowych należą
również
tensometry, wykorzystywane do
pomiarów odkształceń
metodą
tensometrii
oporowej;
Innym prostym i niezawodnym w działaniu typem przetworników są
czujniki
potencjometryczne należące do grupy oporowych:
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
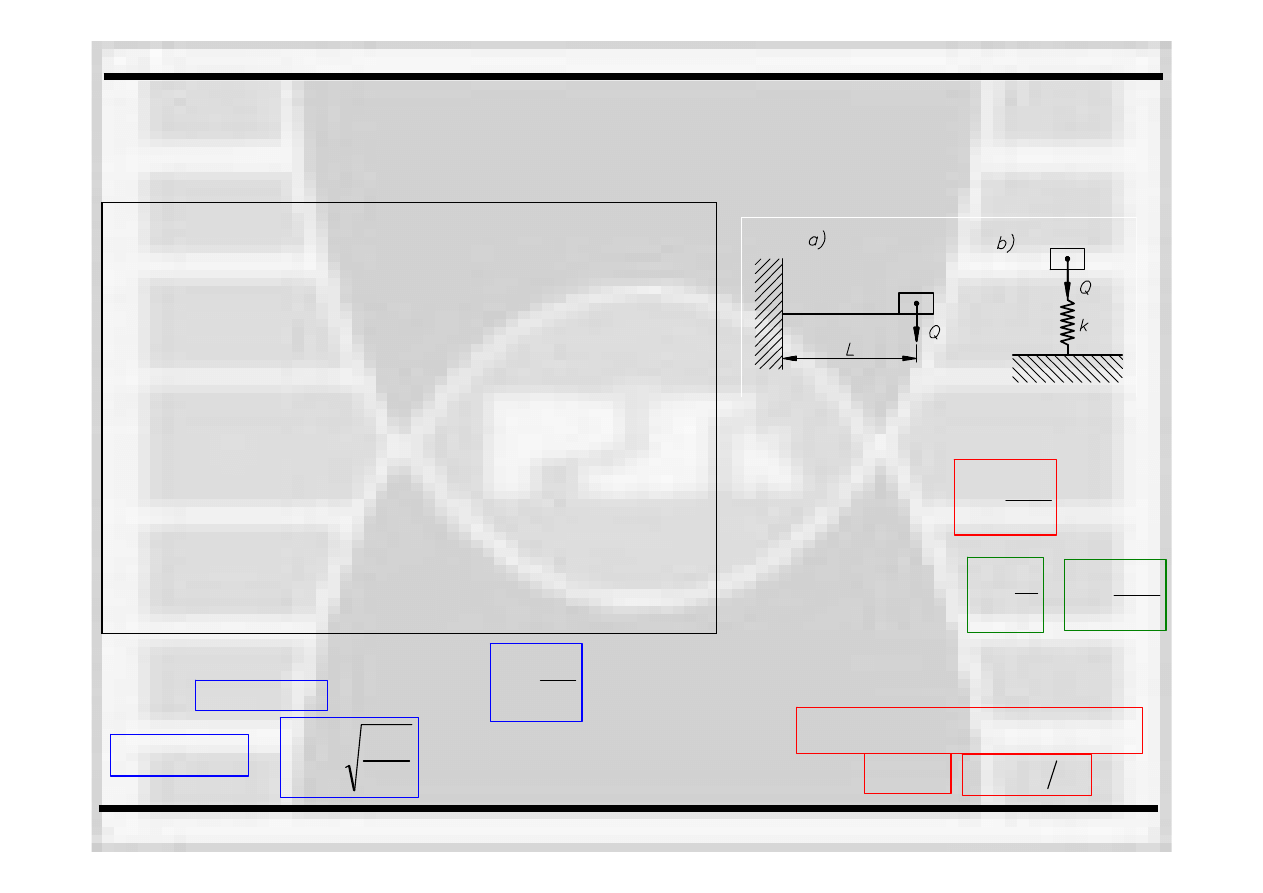
Drgania belki bez tłumienia
•
rozważamy belką
utwierdzoną
w jednym końcu i
obciążoną
masą
na drugim końcu; belkę
wykonano ze stali dla której moduł
Younga
wynosi E=2,15
⋅105MPa;
•
posiada ona długość
L
, szerokość
b
oraz
wysokość
h
;
•
w naszym układzie wstępnie przyjmiemy, że
belka jest nieważka (nie ma ciężaru) oraz
pominiemy tłumienie;
•
aby wyznaczyć
równanie ruchu masy,
rzeczywisty układ zastąpimy równoważnym
składającym się
z masy zawieszonej na sprężynie
o sztywności k;
Belka z obciążeniem (a) i jej model (b)
Strzałka ugięcia
belki
f
QL
EI
=
3
3
Sztywność
sprężyny zastępczej
k
Q
f
=
k
EI
L
=
3
3
Równanie opisujące ruch masy
mx
kx
&& +
= 0
&&x
x
+
=
ω
0
2
0
ω
0
3
3
=
EI
mL
Å
jest to częstością drgań
nietłumionych
T
=
2
0
π
ω
Å
jest to okres
drgań
nietłumionych
( )
( )
( )
x t
C
t
C
t
=
+
1
0
2
0
cos
sin
ω
ω
C
x
1
0
=
0
0
2
ω
V
C
=
Trajektoria ruchu masy dla x
0
i V
0
-
odpowiednio
położenia i prędkości dla czasu t=0
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
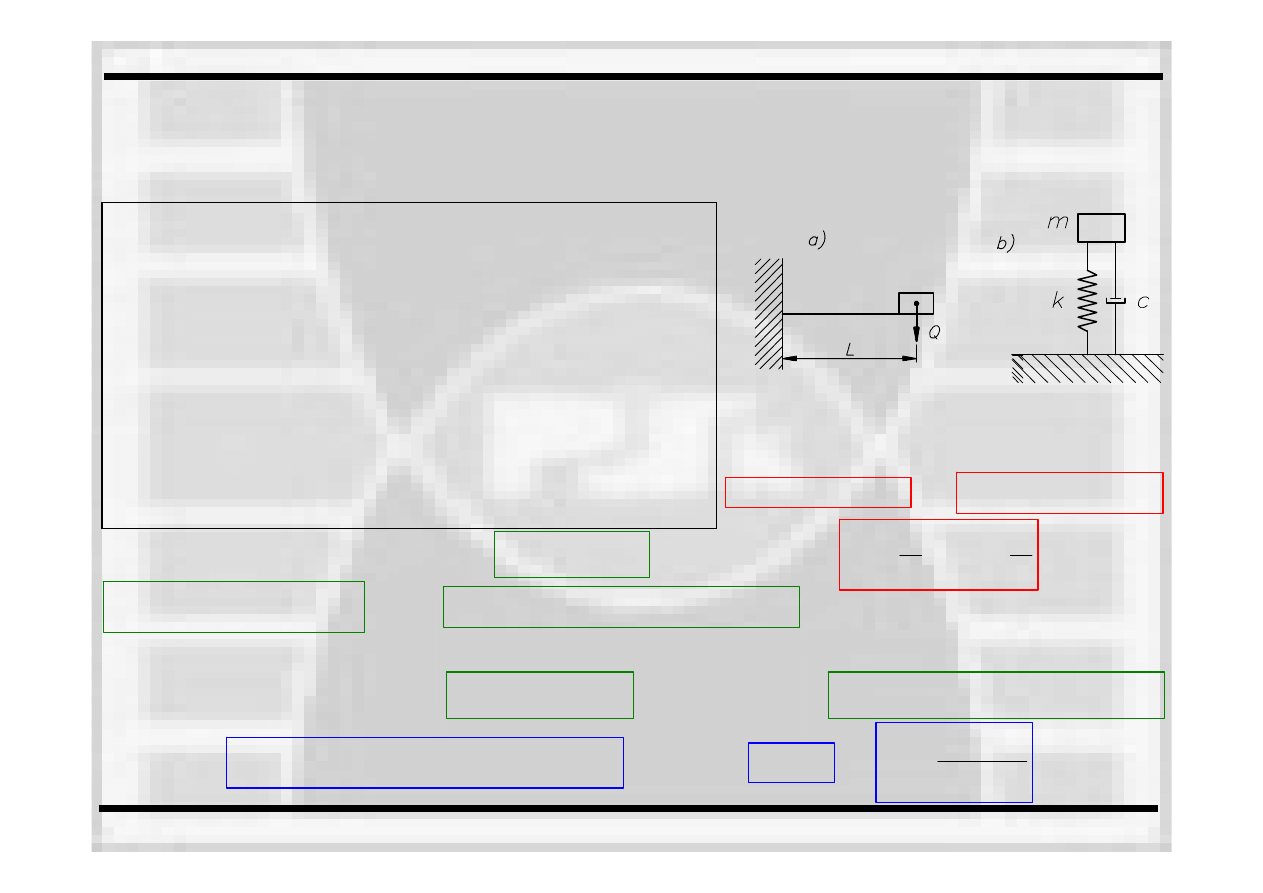
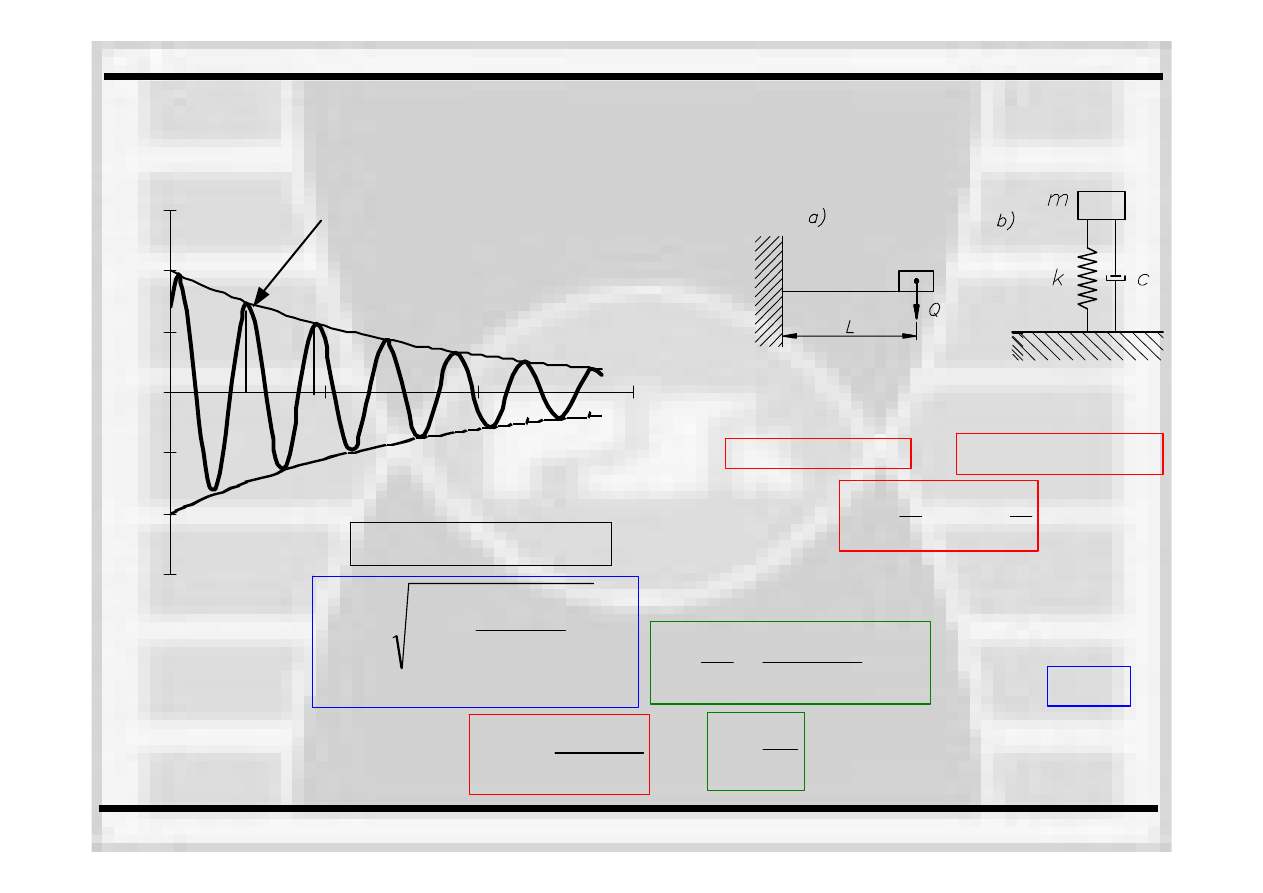
Drgania belki ze słabym tłumieniem
•
rozważamy belką
utwierdzoną
w jednym końcu i
obciążoną
masą
na drugim końcu; belkę
wykonano ze
stali dla której moduł
Younga
wynosi E=2,15
⋅105MPa;
•
posiada ona długość
L
, szerokość
b
oraz wysokość
h
;
•
w naszym układzie przyjmiemy, że belka ma ciężar
własny, więc rozważamy układ z tłumieniem;
•
tłumienie zależy od własności medium w którym porusza
się
badany obiekt, kształt badanego obiektu, siły tarcia
zarówno tego zewnętrznego (wynikającego z kontaktu z
innymi przedmiotami) jak i wewnętrznego (wynikającego
z ruchu cząsteczek materiału względem siebie);
Belka z obciążeniem (a) i jej model (b)
Równanie ruchu z uwzględnioną
siłą
oporu
mx
cx
kx
&&
&
+
+
= 0
lub
&&
&
x
hx
x
+
+
=
2
0
0
2
ω
2
0
2
h
c
m
k
m
=
=
ω
Zakłada się
rozwiązanie postaci
( ) ( )
x t
t e
ht
=
−
ξ
( )
(
)
( )
&&
ξ
ω
ξ
t
h
t
+
−
=
0
2
2
0
jeżeli
ω
ω
ω
0
2
2
0
2
2
2
0
>
⇒
−
=
>
h
h
*
to mamy do czynienia z tłumieniem podkrytycznym (słabym)
( )
( )
&&
*
ξ
ω ξ
t
t
+
=
2
0
Równanie ruchu przyjmuje postać
( )
( )
( )
ξ
ω
ω
t
C
t
C
t
=
+
1
2
cos
sin
*
*
a jego rozwiązanie
Zatem:
( )
( )
( )
(
)
x t
C
t
C
t e
ht
=
+
−
1
2
cos
sin
*
*
ω
ω
C
x
0
0
=
C
V
hx
2
0
0
=
+
ω
*
gdzie
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
Drgania belki ze słabym tłumieniem
Belka z obciążeniem (a) i jej model (b)
Równanie ruchu z uwzględnioną
siłą
oporu
mx
cx
kx
&&
&
+
+
= 0
lub
&&
&
x
hx
x
+
+
=
2
0
0
2
ω
2
0
2
h
c
m
k
m
=
=
ω
-1,5
- 1
-0,5
0
0,5
1
1,5
0
2
4
6
A (t)=A e
0
-h t
A
A
1
2
x
t
Równanie drgań
belki ze
słabym tłumieniem
( )
( )
(
)
x t
A t
t
=
+
sin
*
ω
β
Zmiana amplitudy
w czasie
( )
A t
x
V
hx
e
A
ht
=
+
+
⎛
⎝
⎜
⎞
⎠
⎟
−
0
2
0
0
2
0
ω
*
1
2
444
3
444
Kąt przesunięcia
fazowego
tan
*
β
ω
=
+
x
V
hx
0
0
0
Miarą
tłumienia w układzie może być
iloraz dwóch
amplitud A1 i A2 odległych od siebie o jeden okres.
(
)
Δ =
=
=
−
−
+
A
A
Ae
Ae
e
ht
h t T
hT
1
2
*
*
T
*
*
=
2
π
ω
Å
okres drgań
swobodnych,
tłumionych
δ
= hT
*
logarytmiczny
dekrement
tłumienia
-0,04
-0,02
0
0,02
0,04
0,06
0,08
0,1
0,12
0,14
0,16
0,18
0
5
10
15
x
t
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
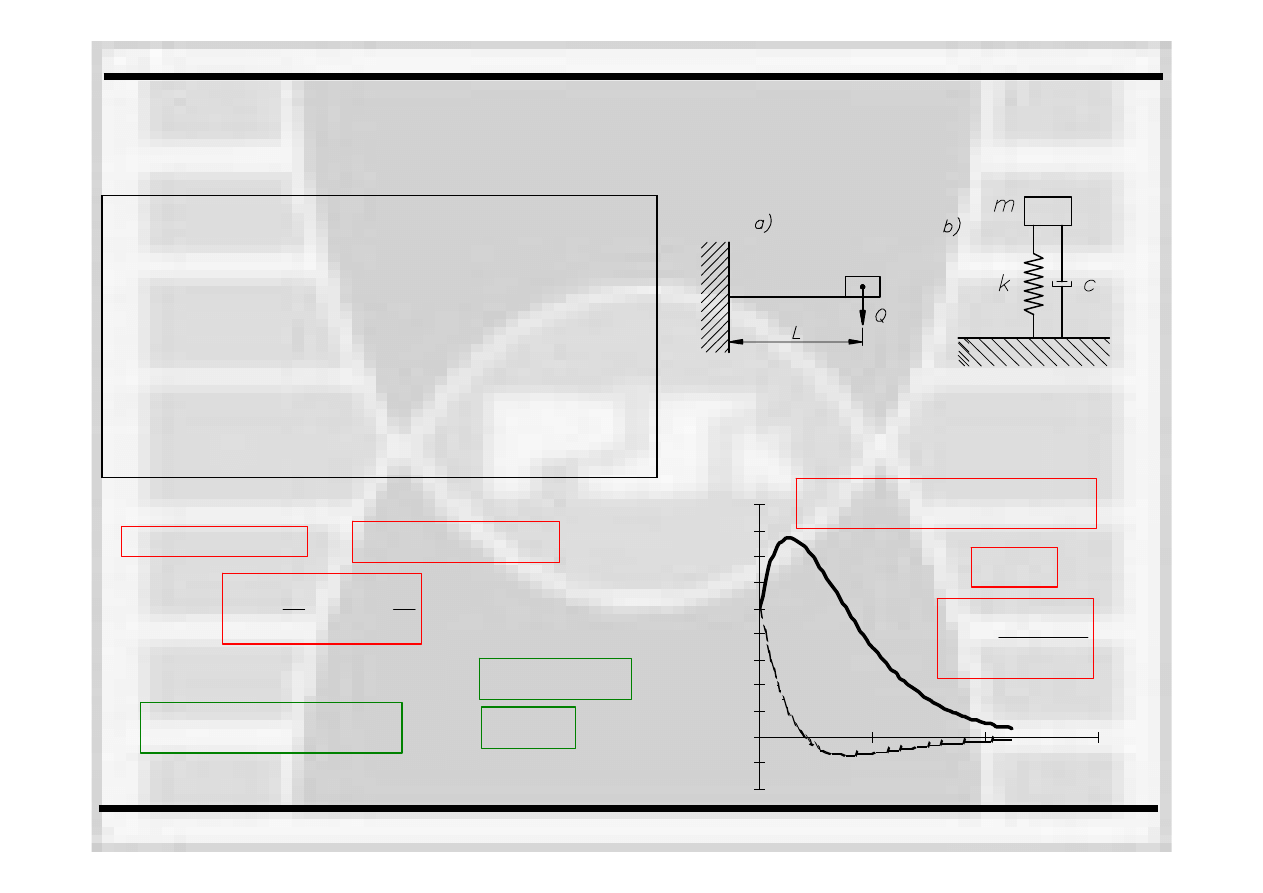
Drgania belki z tłumieniem krytycznym
•
rozważamy belką
utwierdzoną
w jednym końcu i obciążoną
masą
na drugim końcu; belkę
wykonano ze stali dla której
moduł
Younga
wynosi E=2,15
⋅105MPa;
•
posiada ona długość
L
, szerokość
b
oraz wysokość
h
;
•
w naszym układzie przyjmiemy, że belka ma ciężar własny,
więc rozważamy układ z tłumieniem;
•
tłumienie zależy od własności medium w którym porusza
się
badany obiekt, kształt badanego obiektu, siły tarcia
zarówno tego zewnętrznego (wynikającego z kontaktu z
innymi przedmiotami) jak i wewnętrznego (wynikającego z
ruchu cząsteczek materiału względem siebie);
Belka z obciążeniem (a) i jej model (b)
Równanie ruchu z uwzględnioną
siłą
oporu
mx
cx
kx
&&
&
+
+
= 0
lub
&&
&
x
hx
x
+
+
=
2
0
0
2
ω
2
0
2
h
c
m
k
m
=
=
ω
Zakłada się
rozwiązanie postaci
( ) ( )
ht
e
t
t
x
−
=
ξ
( )
(
)
( )
&&
ξ
ω
ξ
t
h
t
+
−
=
0
2
2
0
jeżeli
to mamy do czynienia z tłumieniem krytycznym
Rozwiązanie równania ruchu w
tym wypadku ma postać:
C
x
0
0
=
C
V
hx
2
0
0
=
+
ω
*
gdzie
ω
0
2
2
= h
(
)
[
]
x t
e
x
hx
V t
ht
o
( )
=
+
+
−
0
0
0
0 ,0 5
0 ,1
0 ,1 5
0 ,2
0 ,2 5
0 ,3
0 ,3 5
0 ,4
0 ,4 5
0
1 0
2 0
3 0
4 0
x
t
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
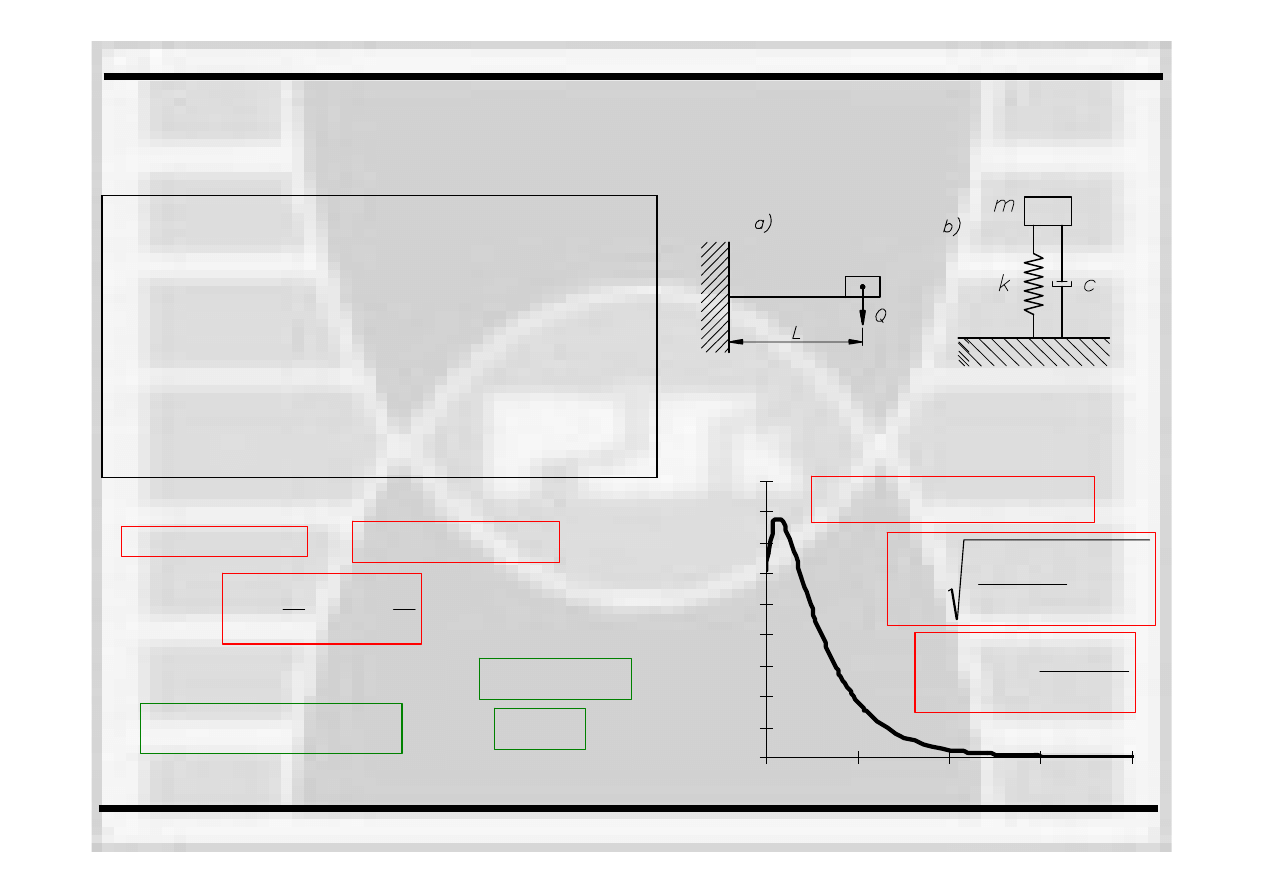
Drgania belki z silnym tłumieniem
•
rozważamy belką
utwierdzoną
w jednym końcu i obciążoną
masą
na drugim końcu; belkę
wykonano ze stali dla której
moduł
Younga
wynosi E=2,15
⋅105MPa;
•
posiada ona długość
L
, szerokość
b
oraz wysokość
h
;
•
w naszym układzie przyjmiemy, że belka ma ciężar własny,
więc rozważamy układ z tłumieniem;
•
tłumienie zależy od własności medium w którym porusza
się
badany obiekt, kształt badanego obiektu, siły tarcia
zarówno tego zewnętrznego (wynikającego z kontaktu z
innymi przedmiotami) jak i wewnętrznego (wynikającego z
ruchu cząsteczek materiału względem siebie);
Belka z obciążeniem (a) i jej model (b)
Równanie ruchu z uwzględnioną
siłą
oporu
mx
cx
kx
&&
&
+
+
= 0
lub
&&
&
x
hx
x
+
+
=
2
0
0
2
ω
2
0
2
h
c
m
k
m
=
=
ω
Zakłada się
rozwiązanie postaci
( ) ( )
ht
e
t
t
x
−
=
ξ
( )
(
)
( )
&&
ξ
ω
ξ
t
h
t
+
−
=
0
2
2
0
jeżeli
to mamy do czynienia z silnym tłumieniem (nadkrytycznym)
Rozwiązanie równania ruchu w
tym wypadku ma postać:
gdzie
ω
0
2
2
< h
( )
(
)
x t
A e
t
ht
=
+
−
0
1
sinh
α β
A
hx
V
0
0
0
2
2
=
+
⎛
⎝⎜
⎞
⎠⎟
−
α
α
( )
tanh
β
α
1
0
0
0
=
+
x
hx
V
www.tu.kielce.pl/~mgraba
Copyright
©2009 Marcin Graba –
Politechnika Świętokrzyska w Kielcach
WYBRANE CHARAKTERYSTYKI UKŁADÓW DRGAJĄCYCH
Wykonanie ćwiczenia -
sporządzenie
sprawozdania
•
Rejestracja drgań
nietłumionych
za pomocą
oscyloskopa
–
plik
tekstowy;
•
Opis zarejestrowanej trajektorii równaniem postaci:
x(t)=A+B
⋅sin(ω⋅t+ϕ), podanie wartości parametrów oraz okresu
drgań; sporządzić
wykres x(t);
•
Opis trajektorii drgań
nietłumionych
zadanej przez prowadzącego
równaniem postaci:
x(t)=A+B
⋅sin(ω⋅t+ϕ), podanie wartości parametrów oraz okresu
drgań; sporządzić
wykres x(t);
•
Opis trajektorii drgań
tłumionych: rozpoznać
rodzaj tłumienia,
napisać
wszelki niezbędne równania, obliczyć
wszystkie parametry
krzywej x(t), wyznaczyć
krzywe zmiany amplitudy w czasie A(t),
wyznaczyć
wszelkie parametry tłumienia; sporządzić
wykres x(t);
nanieść
na wykres krzywą
zmiany amplitudy w czasie;
•
Wnioski końcowe –
własne i rozsądne;
Document Outline
- Wybrane charakterystyki układów drgających
- Cel ćwiczenia
- Definicja drgań wg Newton’a
- Definicja drgań wg Newton’a
- Drgania w codzienności – zalety i wady
- Ogólna metoda pomiaru drgań
- Przetworniki drgań mechanicznych
- Przetworniki mechaniczno-elektryczne i nieelektryczne
- Przetwornik indukcyjny
- Przetwornik potencjometryczny dwustronny
- Drgania belki bez tłumienia
- Drgania belki ze słabym tłumieniem
- Drgania belki ze słabym tłumieniem
- Drgania belki z tłumieniem krytycznym
- Drgania belki z silnym tłumieniem
- Wykonanie ćwiczenia - sporządzenie sprawozdania
Wyszukiwarka
Podobne podstrony:
Dynamika drgania i wibracje (2)
10 Dynamika cw3id 10826
10 Dynamiczne przydzielanie pamieci
Mechanika - zestaw 10, Dynamika II
10 Dynamika cw3
Wyklad 10 Dynamika MS
Zadania do ćwiczeń nr 10 – Dynamika punktu
10 Dynamiczna alokacja pamiecii Nieznany (2)
10 Dynamika konstrukcji
PYTANIA 10, Dynamika Społeczeństwa Polskiego
10 - Dynamika rucha obrotowego bryly - Teoria, AGH, I & II, Fizyka, Teoria
Zestaw 10, Dynamika
Lecture 10 DynamicDataStructures
Dynamika drgania i wibracje (2)
10 Dynamika cw3id 10826
Mechanika zestaw 10 Dynamika II
więcej podobnych podstron