
Elektor
9/98
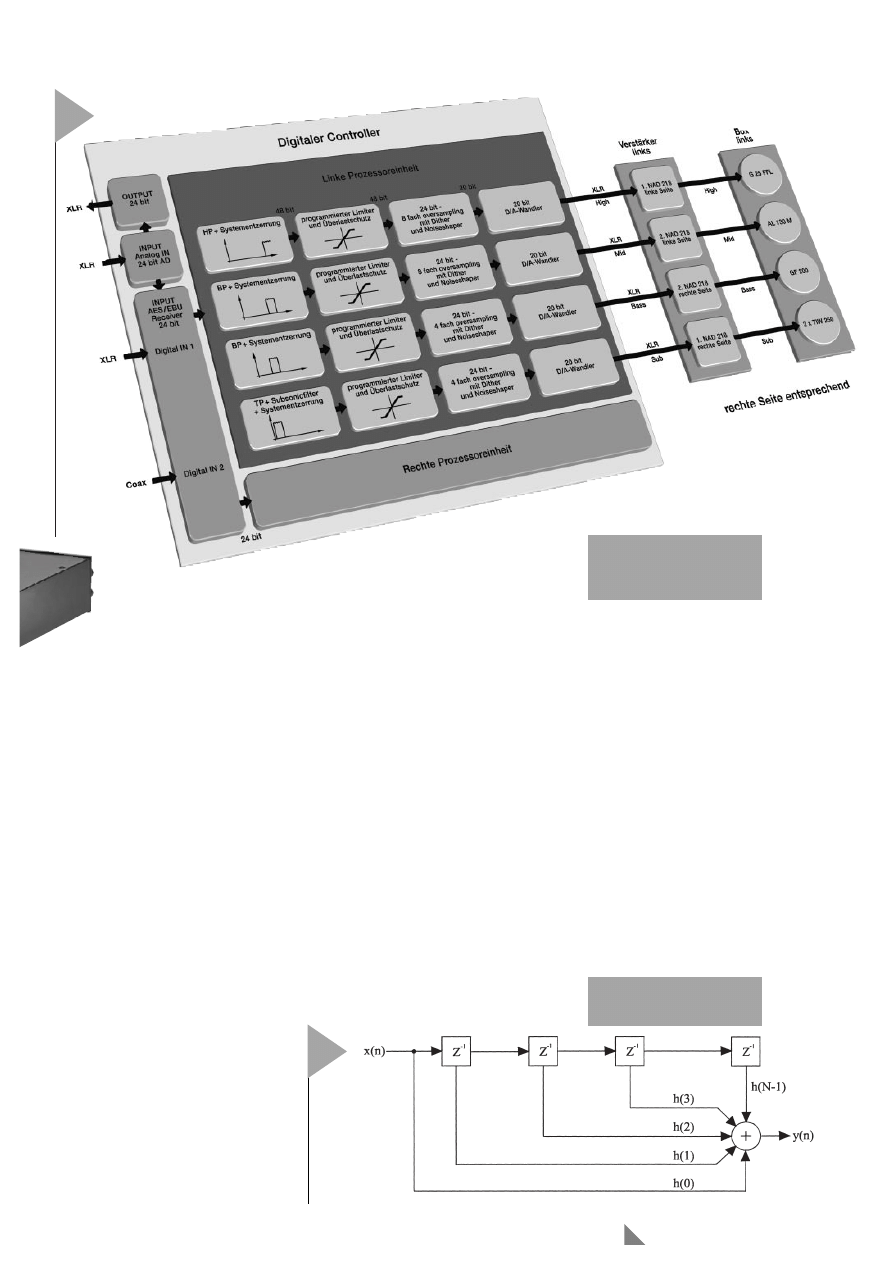
Der Controller DS 4 ist eine Kombina-
tion aus digitalem Vorverstärker, digi-
taler Frequenzweiche, digitaler Fehler-
korrektur der gesamten Übertragungs-
funktion und digital realisierter
Schutzfunktionen. Das Blockschaltbild
(linker Kanal) des digitalen Controllers
in Bild 1 zeigt zwei digitale (1⋅Koax,
1⋅XLR) sowie einen analogen XLR-
Eingang. Die analogen Eingangssig-
nale werden einer 24-bit-A/D-Wand-
lung unterzogen. Mit diesem oder dem
bis zu 24 bit breiten Datenstrom über
die digitalen Eingänge des AES/EBU-
Receivers wird die interne Signalverar-
beitung gespeist. Der Controller kann
mit Abtastraten von 44,1 kHz und 48
kHz angesteuert werden. Die am ana-
logen Eingang gewandelten Signale
können zum digitalen Ausgang mit
56
Digitales
Lautsprechersystem
Aktivweiche mit Hochleistungs-DSPs
INFO & GRUNDLAGEN
Die digitale Signal-
verarbeitung hat in
den letzten Jahren
immer mehr an
Bedeutung gewon-
nen. Recheninten-
sive Filteroperationen
werden von extrem
leistungsfähigen
DSPs übernommen.
Die gewaltigen
Rechenleistungen
ermöglichen, auf
digitaler Ebene Fre-
quenzweichen für
vollaktive Lautspre-
chersystem zu reali-
sieren und gleichzei-
tig die komplette
Fehlerkorrektur der
gesamten Signalkette
zu übernehmen. Ein
solches Gerät stellt
auch das Herzstück
des digitalen, aktiven
4-Wege-Lautspre-
chersystems DS 4
von VISATON dar.
Von Dipl-Ing. Lutz Naumann
einer Wortbreite von 24 bit
weitergeleitet werden. Diese Funk-
tion (Digital Insert) wird für den Ein-
meßvorgang benötigt und an dieser
Stelle nur der Vollständigkeit halber
erwähnt. Die Signalverarbeitung
erfolgt pro Kanal (links/rechts) mit je
einem Motorola DSP 56009 und einem
DSP 56007.
F
R E Q U E N Z W E I C H E
M I T
F I R - F
I L T E R N
Um eine endliche Impulsantwort zu
erreichen, wurde die gesamte interne
Filterung ausschließlich über FIR-Filter
(Finite Impuls Response) realisiert, die
als einzige Filterstruktur die Möglich-
keit der getrennten Beeinflussung von
Amplituden- und Phasenfrequenz-
gang bietet.
Die Funktionsweise von FIR-Filtern
(Bild 2) ist direkt mit der einer FFT
(Fast Fourier Transformation) ver-
gleichbar, da diese ja ein schnelles
Rechenverfahren zu parallelen Berech-
nung von digitalen Filtern darstellt.
Der Nachteil dieser Filter ist eine
extreme Filterlänge, die eine hohe
Rechenleistung erfordert und eine
damit verbundene hohe Signalverzö-
gerung (Laufzeit). Um ein Vor- und
Nachschwingen der Impulsantwort
aufgrund der dennoch begrenzten Fil-
terlänge zu vermeiden (fehlerfrei funk-
tioniert ein FIR-Filter nur mit einer
unendlichen Filterlänge), wurden in
die Filter spezielle mathematische
“Fensterfunktionen” integriert, die sich
nicht auf die eigentliche Übertra-
gungsfunktion des Filters auswirken,
sondern nur die unerwünschten
Effekte unterdrücken, die durch eine
begrenzte Filterlänge entstehen.
Um die vorhandene Rechenleistung
möglichst gut auszunutzen, werden im
digitalen Controller zunächst die Fre-
quenzbereiche für die vier Wege pro
Kanal SUB, BASS, MID und HIGH auf-
geteilt. Bei MID wird mit einem 4fach-,
bei BASS und SUB mit einem 16fach-
Downsampling gearbeitet. Das Verfah-
ren entspricht einer Unterabtastung,
wodurch sich die obere Grenzfrequenz
für MID auf 4 kHz und für BASS und
SUB auf 1 kHz und die erforderliche
Rechenleistung um den Faktor 4 bezie-
hungsweise 16 für den betreffenden
Weg verringert. Auf diese Weise ist es
möglich, mit vertretbarem Aufwand im
57
Elektor
9/98
Weg SUB 8.000 Eingangswerte für
einen Ausgangswert zu berechnen, um
auch bei tiefsten Frequenzen eine Kor-
rektur der Übertragungsfunktion vor-
zunehmen.
F
R E Q U E N Z G A N G
-
E N T Z E R R U N G
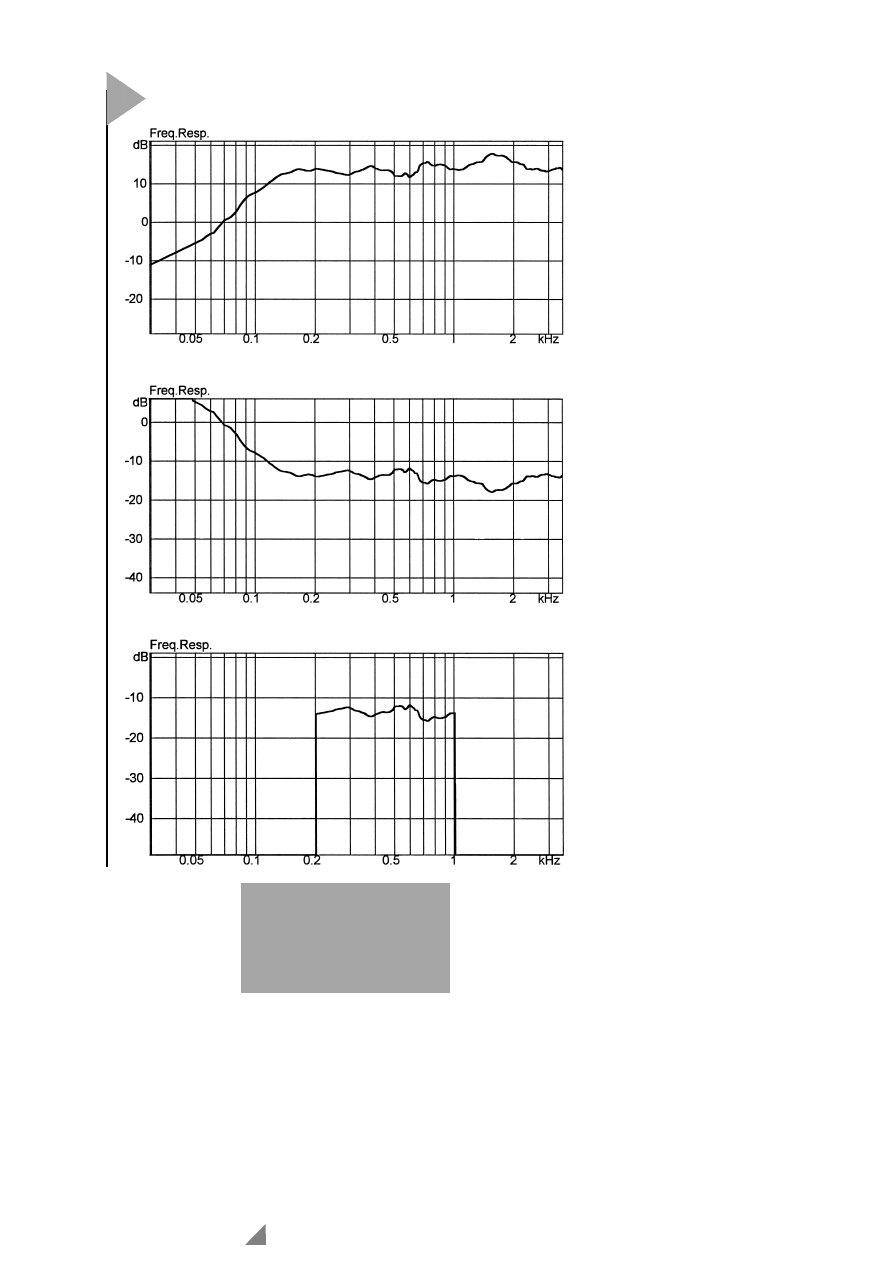
Für die Entzerrung des Systems wird
jeder Weg einzeln über die gesamte
Signalkette gemessen. Dazu ist eine
spezielle Meß- und Entzerrsoftware
notwendig, die einen Frequenzgang
des Übertragungsweges wie in Bild 3a
ermittelt. Alle acht gemessenen Über-
tragungsfunktionen werden im ersten
Verarbeitungsschritt komplex inver-
tiert, also in Betrag und Phase (b).
Wird nun ein realer Lautsprecher über
seine eigene, komplex invertierte Über-
tragungsfunktion angesteuert, ist das
Bild 1. Prinzipschalt-
bild des Digitalcontrol-
lers (linker Kanal).
1
2
Bild 2. Prinzip einer
FIR-Filterstruktur.
Ergebnis theoretisch
eine fehlerfreie
Übertragung. Es ent-
steht allerdings wie
eingangs beschrie-
ben in jedem Fall
eine Laufzeit, die
davon abhängt, wie gut in der Praxis
die Entzerrung erfolgen soll. Eine Ent-
zerrung ist auch nur in dem Frequenz-
bereich sinnvoll, in dem der Lautspre-
cher einen hohen Wirkungsgrad
besitzt. Anderenfalls wäre eine zu
hohe Verstärkerleistung für die Kor-
rektur notwendig, die der Lautspre-
cher unter Umständen nicht verkraftet,
beziehungsweise der resultierende
Schalldruck des entzerrten Lautspre-
chers wäre zu gering.
Um bei der Vielzahl
von Rechenopera-
tionen auftretende
A b w e i c h u n g e n
durch Rundungs-
fehler möglichst
gering zu halten,
muß mit einer sehr hohen internen
Wortbreite gearbeitet werden. Zwi-
schen den dargestellten Funktionen
des Blockschaltbildes beträgt die Wort-
breite 48 bit, wobei die prozessorinter-
nen Rechenoperationen mit einer noch
höheren Wortbreite erfolgen.
Die nun entstandene invertierte Über-
tragungsfunktion wird im nächsten
Schritt mit der Filterfunktion (in Bild
3c ein Bandpaß) versehen. Es können
hier absolut phasenstarre Filter mit
Flankensteilheiten bis zu 300 dB pro
Oktave realisiert werden.
V
O R K O R R I G I E R E N
I S T B E S S E R A L S
N
A C H R E G E L N
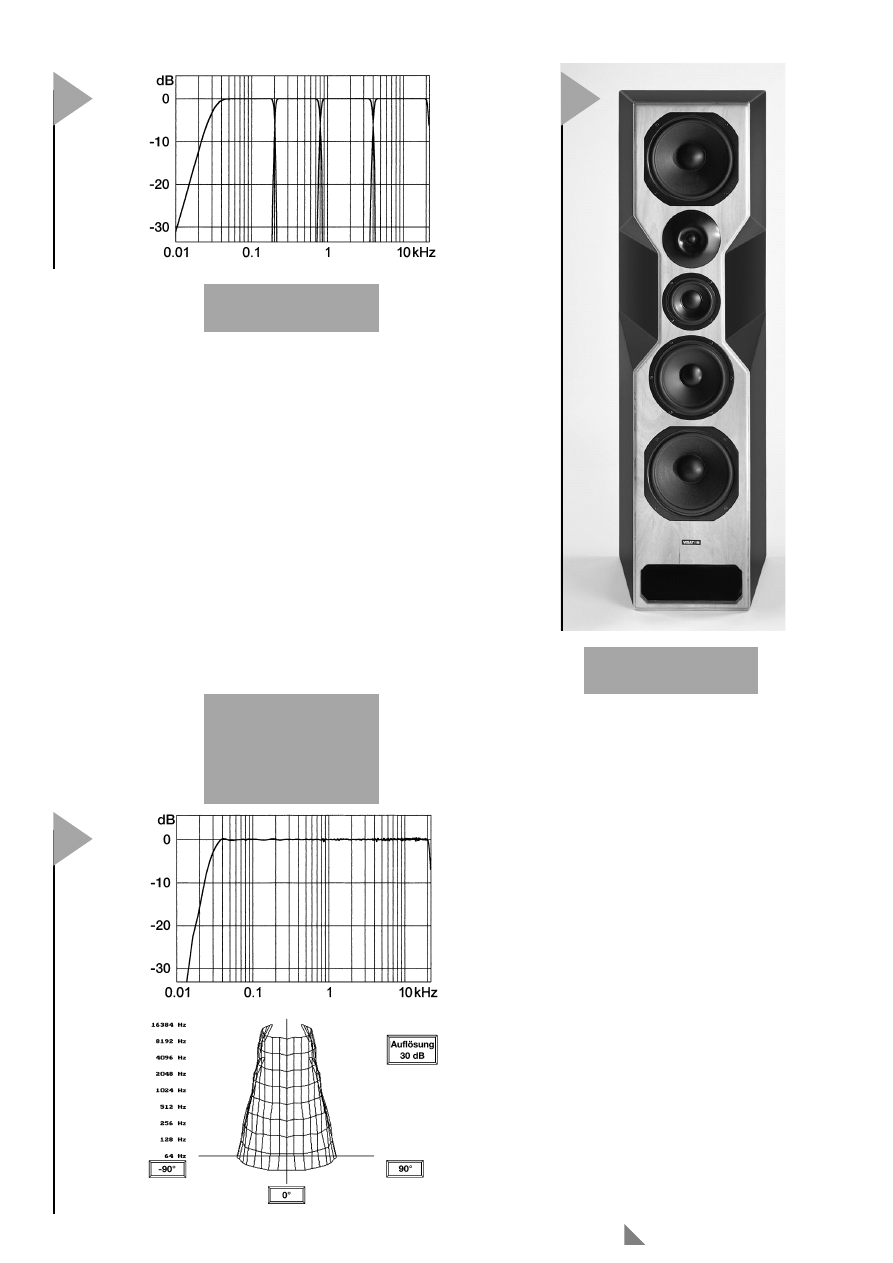
Die resultierende Übertragungsfunk-
tion (Bild 4) entspricht bereits dem zur
Entzerrung notwendigen Filter, wobei
jeder Weg ein individuelles Ergebnis
liefert. Das digitale Ausgangssignal
eines solchen Filters beschreibt somit
das Signal, mit dem das betreffende
Chassis später angesteuert wird. Die
digitale Signalverarbeitung bietet dar-
über hinaus aber noch weitere Mög-
lichkeiten. Mit der genauen Kenntnis
der technischen Daten der verwende-
ten Komponenten (Lautsprecher, Ver-
stärker), ist es deshalb bereits im digi-
talen Datenstrom möglich, Aussagen
über die tatsächlichen Belastungen zu
treffen, allerdings nur dann, wenn die
verwendeten Komponenten möglichst
nur lineare Abweichungen aufweisen,
der prozentuale Fehler bei verschiede-
nen Pegeln gleich bleibt. Lineare Feh-
ler können durch einen Einmeßvor-
gang erfaßt und korrigiert werden.
Fehler wie Klirrfaktor, der zum Beispiel
durch Partialschwingungen oder einen
zu geringen maximalen linearen Hub
des Lautsprechers verursacht werden,
fallen in den Bereich der nichtlinearen
Fehler. Bei steigendem Pegel wächst
hier der prozentuale Fehler. Diese
nichtlinearen Fehler können von
einem digitalen Controller nicht korri-
giert werden. Durch qualitativ hoch-
wertige Komponenten ist es aber mög-
lich, die nichtlinearen Abweichungen
zu minimieren. In diesem Fall ist eine
aktive Regelung im Baßbereich nicht
nur überflüssig, sondern sogar nicht
erwünscht. Die Regelung würde näm-
lich eine Systemrückkopplung darstel-
len und damit wie auch IIR-Filter zu
einer unendlichen Impulsantwort
führen, was mit der Grundidee eines
fehlerfreien Lautsprechersystems mit
endlicher Impulsantwort nicht verein-
bar ist.
Solange die dem digitalen Controller
folgenden Bestandteile der Signalkette
nur im linearen Bereich arbeiten, ist es
bereits im digitalen Datenstrom mög-
lich, alle linearen Fehler des Systems zu
korrigieren.
L
I M I T S
Die genaue Kenntnis der Grenzwerte
der Einzelkomponenten, mit denen
der Controller zusätzlich programmiert
wird, gestattet darüber hinaus eine
Vorhersage, wann das System den
linearen Bereich verläßt und eine Kom-
ponente überlastet wird. Hier werden
die programmierten Limiterfunktio-
nen wirksam, Schutzfunktionen, die
bei Erreichen vorgegebener Grenz-
werte in den Signalfluß eingreifen und
Komponenten vor Überlastung schüt-
58
Elektor
9/98
3
Bild 3. Etappen des Signal-
wegs: Frequenzgang (a),
invertierter Frequenzgang
(b) und Bandpaß-Aus-
schnitt des invertierten Fre-
quenzgangs (c).
a
b
c
zen. Dies geschieht
allerdings nicht durch
ein Abschalten, son-
dern eine gezielte Begrenzung im Aus-
gangssignal des digitalen Controllers.
Durch diese Begrenzungen entstehen
für Signalanteile oberhalb der Limiter-
schwelle nichtlineare Abweichungen,
die zwar zu Klirrfaktor führen, jedoch
keine Beschädigungen nach sich zie-
hen. Wird dieser Klirrfaktor bei Pegel-
spitzen akzeptiert, kann ein Lautspre-
cher bei Musikwiedergabe im Mittel
sogar mit einem höheren Lautstärke-
pegel betrieben werden als ohne. Für
die verzerrungsfreie Wiedergabe stellt
das Eingreifen der Limiter die Ober-
schwelle dar. Der Visaton-Controller
besitzt drei verschiedene Limiterfunk-
tionen, nämlich einen Peak-Limiter, der
Impulsspitzen erkennt, einen thermi-
schen Limiter, der mit Hilfe eines
Magnet- und Schwingspulentempera-
turmodels auf thermische Belastungen
der Lautsprecher rea-
giert und außerdem
einen Overshoot-Limi-
ter, der eine bessere
Auslastung des Netz-
teils der verwendeten
Endstufen erlaubt, da
die Kurzzeitleistung bei
Impulsen meist höher
ist als die Dauerausgangsleistung.
R
Ü C K W A N D L U N G
Als letzten Verarbeitungsschritt wan-
delt der Controller die digitalen Signale
in analoge zurück. Hierzu wird die
Wortbreite zunächst auf 24 bit verrin-
gert und für die Wege SUB und BASS
ein echtes 24-bit-4fach- und für MID
und HIGH ein echtes 24-bit-8fach-
Oversampling (eine Interpolation mit
gleichzeitiger Erhöhung der Abtast-
rate) gerechnet. Man erhält so eine
Vielzahl von Zwischenwerten, durch
die eine bessere D/A-Wandlung mög-
lich wird. Der digitale Datenstrom
wird aufgrund der Zwischenwerte
wieder mit einer Wortbreite von 48 bit
ausgegeben und an die Stufe
Dither
und Noise Shaper weitergeleitet. Dem
Datenstrom wird im Dither gezielt ein
digitales Rauschsignal
überlagert, wodurch die
Rechteckform des Sig-
nals, die bei Abtastung
niedriger Pegel entsteht,
aufgelöst wird. Der dar-
auf folgende Noise Shaper entspricht
einem Hochpaß, der sich nur auf das
beigefügte Rauschsignal auswirkt. Er
verschiebt den Rauschteppich in einen
nicht mehr relevanten höheren Fre-
quenzbereich. Gleichzeitig wird in die-
ser Stufe das 48-bit-Signal auf die für
den verwendeten D/A-Wandler not-
wendigen 20 bit konvertiert. Die D/A-
Umsetzung selbst erfolgt für jeden
Weg mit einem 20-bit-D/A-Wandler
von Burr Brown.
Das jetzt erzeugte Analogsignal wird
über störsichere symmetrische XLR-
Verbindungen an die einzelnen End-
verstärker weitergegeben. Pro Weg
benötigt man einen Leistungsverstär-
ker, dessen Ausgang über ein
Anschlußterminal direkt mit dem in
der Box montierten, zugehörigen
Chassis verbunden ist.
D
I E
B
O X
D S 4
Die Abstrahlcharakteristik einer Box
beeinflußt die in den Raum abgege-
bene Energiemenge. Dadurch besitzen
Boxen mit unterschiedlichem Abstrahl-
verhalten, auch wenn sie bei 0° gleiche
Übertragungsfunktionen aufweisen, im
Raum eine unterschiedliche Klang-
farbe. Die Gehäuseform der DS 4
59
Elektor
9/98
4
Bild 4. Bandpaßfunk-
tionen der DS 4.
6
5
Bild 5. Die Box DS 4 in
natura.
Bild 6. Amplitudenfre-
quenzgang der DS 4 in
gewohnter Frontaldar-
stellung (a) und räum-
lich um die Box herum
gemessen (b).
a
b
wurde für eine fre-
quenzproportionale
Schallbündelung kon-
struiert. Dieses
Abstrahlverhalten wird
innerhalb der AES
(Audio Engineering
Society) als Optimum
angesehen. Mit Hilfe
des digitalen Control-
lers wird die Signalkette über den
gesamten Frequenzbereich im Fre-
quenzgang, Phasengang (konstante
Gruppenlaufzeit) und Ausschwingver-
halten korrigiert. Bei Flankensteilheiten
bis zu 300 dB pro Oktave existieren
praktisch keine Über-
nahmebereiche mehr,
wodurch die akusti-
schen Nachteile her-
kömmlicher Mehrwe-
geboxen beseitigt sind.
Für ein optimales
Abstrahlverhalten und
maximalen Schalldruck
wurde die Box als 4-
Wege-System ausgelegt.
Im Subbaßbereich kom-
men zwei 25-cm-Lang-
hubbässe TIW 250 in
D’Appolito-Anordnung
zum Einsatz. Dies sorgt für eine gleich-
mäßige Raumanregung und Zuord-
nung des Baßentstehungsortes zum
Mittel- Hochtonbereich. Das 122-Liter-
Baßreflexsystem besitzt eine extrem
große Öffnungsfläche, um Strömungs-
geräusche auszu-
schließen. Im Baßbe-
reich arbeitet der 20-cm-
Lautsprecher GF 200 mit
Glasfasermembran und
hinterlüfteter Zentrierung. Den Mittel-
tonbereich übernimmt der 13-cm-Laut-
sprecher AL 130 M, der mit einer koh-
lenstoffbeschichteten Aluminiummem-
bran, hinterlüfteter Zentrierung und
einem Impedanzkontrollring konstru-
iert ist. Alle eingesetzten Konuslaut-
sprecher besitzen neben Kapton-
schwingspulenträgern auch belüftete
Polkerne. Der Hochtonbereich wird
von der ferrofluidgekühlten 25-mm-
Gewebekalotte G 25 FFL mit einem
speziell für das Abstrahlverhalten ent-
wickelten Kugelwellenhorn abgedeckt.
Das System DS 4 wird in einem reflexi-
onsarmen Meßraum eingemessen,
wobei der digitale Controller alle Feh-
ler erkennt und “lernt”, um diese spä-
ter in Echtzeit korrigieren zu können.
Der Controller wird mit zwei Korrek-
turvarianten ausgeliefert und kann bei
Bedarf von einem Techniker an den
Hörraum angepaßt werden
Für das 4-Wege-System benötigt man
pro Box vier Verstärkerkanäle. Das
System DS 4 wird im Weg SUB mit 400
W an 4 Ohm und in den Wegen BASS,
MID und HIGH mit je 250 W an 8
Ohm betrieben.
Abschließend sind einige akustisch
gemessene Kurven abgebildet, die die
Vorteile der digital korrigierten Signal-
kette der DS 4 gegenüber einer analo-
gen Lösung aufzeigen.
Bild 6. Der in 3 m Abstand auf Achse
des Hochtöners (typische Hörposition)
gemessener Amplitudenfrequenzgang
besitzt einen Übertragungsbereich von
30 Hz (-3 dB) bis 22 kHz (-3 dB) und
eine Restwelligkeit von ±0,5 dB.
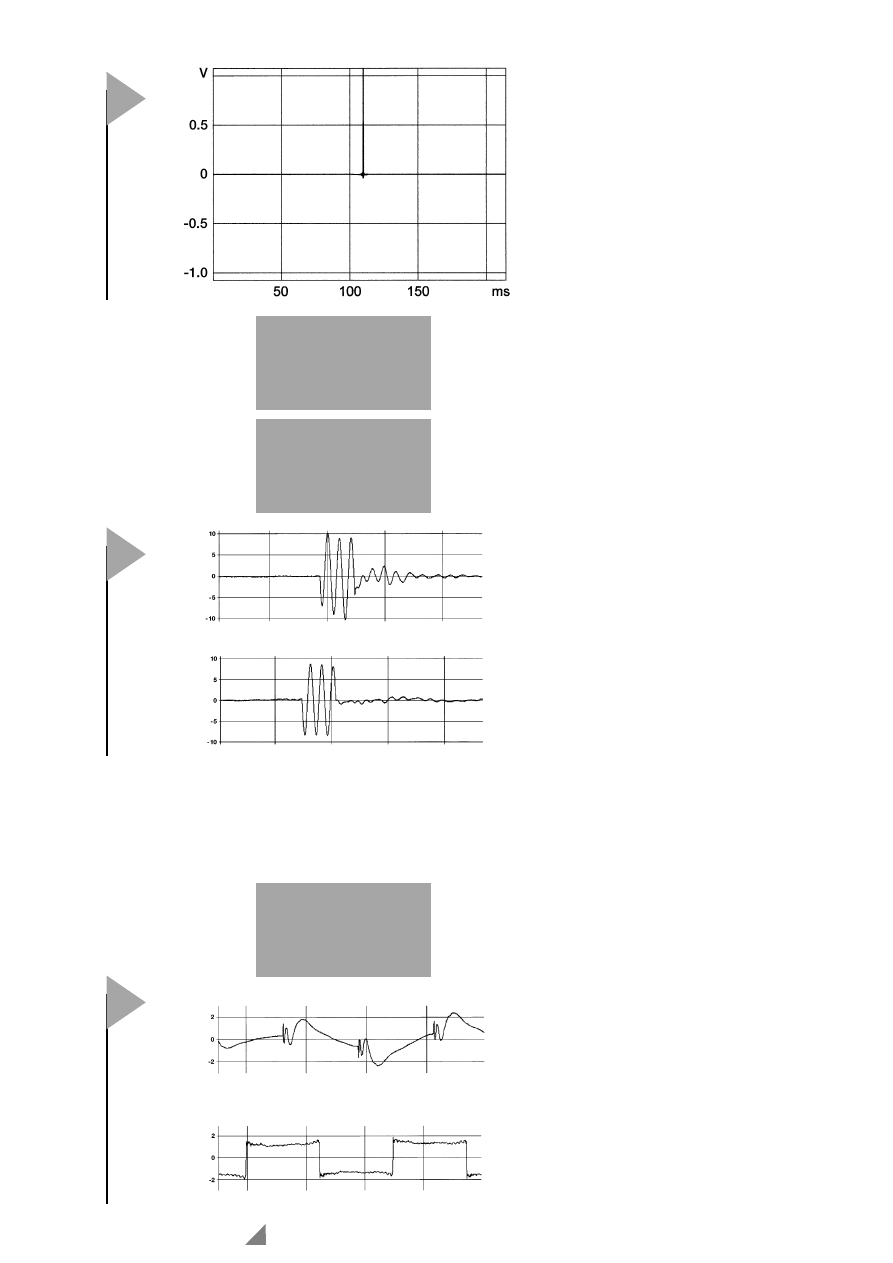
Bild 7. Die Impulsantwort zeigt mit
einer Impulsbreite von 50 µs ein idea-
les Verhalten, was auf einen fehler-
freien Frequenz- und Phasengang hin-
deutet. Zu erkennen ist weiterhin die
beschriebene relativ große Gruppen-
laufzeit von ca. 110 ms, die bei stereo-
phoner Musikwiedergabe aber pro-
blemlos in Kauf genommen werden
kann.
Bild 8. Am Beispiel eines 500-Hz-Ton-
burst-Signales ist die Korrektur des
Ausschwingverhaltens in einem analo-
gen (a) und im digital entzerrten
System (b) zu erkennen.
Bild 9. Nur durch einen korrigierten
Phasengang bei gleichzeitiger Korrek-
tur des Amplitudenfrequenzgangs ist
es möglich, auf akustischem Wege ein
Rechtecksignal wiederzugeben. Hier-
für stellen FIR-Filter mit ihrer getrennt
möglichen Beeinflussung von Ampli-
tuden- und Phasenfrequenzgang die
ideale Lösung dar. Gezeigt ist die
Reproduktion eines 100-Hz-Rechteck-
signals einer analogen Box (a) und des
digitalen Systems DS 4 (b).
(980032)rg
60
Elektor
9/98
7
8
9
Bild 7. Die 50
µs breite
Impulsantwort der
DS 4 mit einer Grup-
penlaufzeit von etwa
110 ms.
Bild 8. Ausschwingver-
halten auf einen 500-
Hz-Tonburst einer ana-
logen Box (a) und der
DS 4 (b).
Bild 9. Übertragung
eines 100-Hz-Recht-
ecksignals durch eine
analoge Box (a) und
die DS 4 (b).
a
b
a
b
Wyszukiwarka
Podobne podstrony:
Digitales terrestrisches Fernsehen Mehr Programme und Dienste mit digitaler uebertragungstechnik
Digitaler Ausgang mit Power
Mit polityczny
18 Mit mityzacja mitologie wsp Nieznany (2)
zestawy glosnikowe cz1 MiT 10 2007
Principles of Sigma Delta Conversion for Analog to Digital Converters
Page153 Model 2491 2492 2493 Digital Switchboard meter c
Legendy Mit o stworzeniu
DIGITAL OUTPUT ANGULAR ACCELEROMETER 8556
Mit monogamii Jak poradzic sobie ze zdrada partnera mitmon
mit
Lori Foster Rendezvous mit Risiko
Powerprojekte mit Arduino und C
Digital ECU Tuner III Manual
Mit o Syzyfie
Mit o Prometeuszu streszczenie, Ściągi
mit o ucieczce hathor, Egipt
mit o ozyrysie, Egipt
mit. celtycka legendy arturiańskie postacie, Celtowie
więcej podobnych podstron