
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514, Kraków 1998
15. Projektowanie oprogramowania dla sterowników PLC
Wiele systemów jest sterowanych za pomocą prostych algorytmów tylko poprzez wejścia
binarne (0 - 1). Wyjściami tych systemów też są przeważnie sygnały binarne. Do sterowania takich
układów projektowane są proste układy elektroniczne. Coraz większe zastosowanie znajdują
elektroniczne układy typu ASIC, umożliwiające zaprogramowanie złożonych algorytmów.
Mikrokomputery nazywane sterownikami programowalnymi lub programowalnymi sterownikami
logicznymi PLC (Programmable Logic Controllers) stosowane są do sterowania systemów, dla
których nie istnieje potrzeba archiwizacji i wizualizacji danych.
15.1. Zastosowanie modeli automatowych w projektowaniu systemów cyfrowych
Do
opisu
układów przełączających stosujemy metody algebry Boole’a. Rozpatrzmy funkcję
y= f(x1, x2, ... xn), której argumenty i wartość należą do zbioru { 0, 1}. Funkcje takie nazywamy
funkcjami przełączającymi. Funkcję określoną na zbiorze symboli nazywamy funkcją kombinacyjną.
Funkcje kombinacyjne opisują automat bez pamięci.
Etapy syntezy automatu bez pamięci:
1. Podanie zbioru warunków.
2. Uzupełnienie zmiennych w poszczególnych warunkach.
3. Określenie funkcji przełączających dla poszczególnych warunków.
4. Minimalizacja formalna funkcji.
5. Deminimalizacja techniczna, końcowa postać funkcji.
6. Schemat logiczny struktury.
Przykład 15.1.
W systemie zainstalowane są 3 sygnalizatory dwupołożeniowe. Mamy uzyskać sygnał w dwóch
przypadkach:
1) gdy wszystkie zbiorniki osiągną określony poziom,
2) gdy co najmniej dwa dowolne osiągną określony poziom.
Rozwiązanie:
1. Zbiór warunków
Sygnał wyjściowy ma być ustawiony dla następujących warunków:
abc, ab, ac, bc.
2. Uzupełnienie zmiennych w poszczególnych warunkach:
ab
ab c c
abc abc
ac
a b b c abc abc
ab
a a bc abc abc
⋅ =
+
=
+
⋅ =
+
=
+
⋅ =
+
=
+
1
1
1
(
)
(
)
(
)
3. Określenie funkcji. Zestawiając wszystkie iloczyny przy eliminacji powtarzających się otrzymamy:
y
=
+
+
+
abc abc ab c abc
4. Dokonujemy minimalizację stosując jedną z metod, uzyskamy:
y= ab + ac + bc
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-2
5. Minimalizacja techniczna. Tworzymy taki zapis, by każdy układ sumujący lub mnożący miał dwa
wejścia. Istnieją trzy rozwiązania jednym z nich jest y= c(a+b) +bc.
6. Schemat logiczny układu przedstawia rysunek 15.1.
+
&
+
&
a
b
c
y
Rys. 15.1. Schemat logiczny przykładowego układu
Układy kombinacyjne mają ograniczone możliwości, gdyż wiele układów wymaga
uwzględnienia stanu systemu. Dla takich układów stosuje się automaty z pamięcią.
Rozpowszechnienie znalazły automaty Meale'go i Moore'a.
Automat Meale'go:
S(t+1)=
α
( X(t), S(t) )
Y(t)=
λ
( X(t), S(t) )
Automat Moore'a:
S(t+1)=
α
( X(t), S(t) )
Y(t+1)=
λ
( S(t) )
S jest wektorem stanu automatu, X - wektorem wejść, a Y - wektorem wyjść. Zmiana stanu i wyjść
obu automatów ( wyznaczane są przez funkcje
α
i
β
) dokonywana jest w dyskretnych chwilach
czasu.
Techniki projektowania systemów cyfrowych opisane są w wielu podręcznikach, np. [4].
15.2. Sprzętowa realizacja sterowania logicznego
Istnieją rozwinięte techniki szybkiego wytwarzania układów elektronicznych, realizujących określony
program sformułowany przez użytkownika [4]. Program ten jest odwzorowywany w na pewien
uniwersalny moduł elektroniczny. Przekrój tych układów przedstawia rysunek 15.2.
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-3
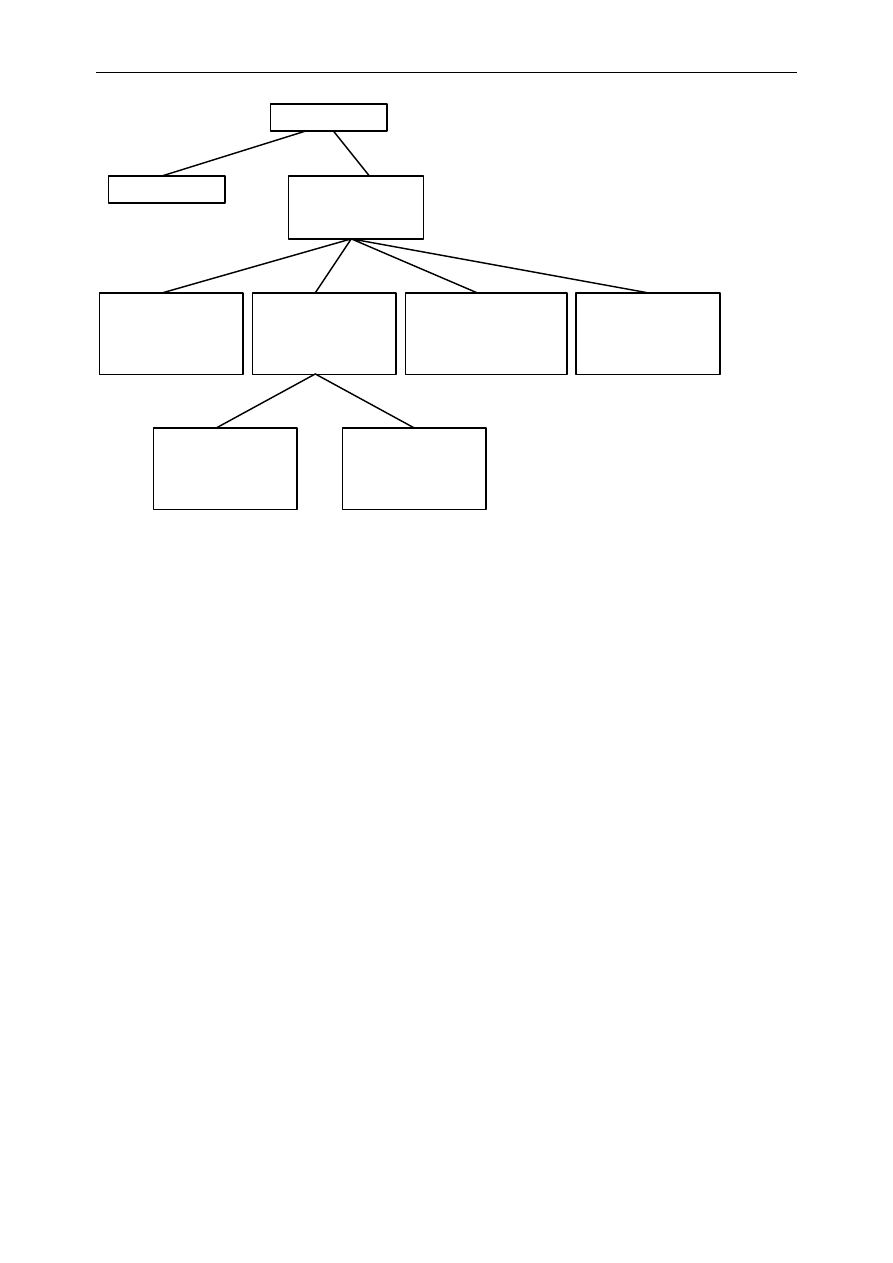
Układy scalone
Wielkie standardy
ASIC
Application Specific
Integrated Circuits
Full Custom
Układy na zamówienie
z pełnym cyklem
projektowania
Semi Custom
Układy z
ograniczonym cyklem
projektowania
PLD
Układy programowalne
przez użytkownika
Programmable Logic Devices
FPGA
Field Programmable
Gate Array
Standard Cells
Układy
wykorzystujące
komórki standardowe
Gate Arrays
Układy na płytkach
wstępnie
przygotowanych
Rys. 15.2. Podział układów scalonych
Określenie ASIC (ang. Application Specific Integrated Circuit) stosuje się ogólnie do wszelkich
układów, projektowanych i konstruowanych specjalnie do zastosowania w jakiejś konkretnej aplikacji.
Koncepcja takich układów pojawiła się wraz z rozwojem technologii VLSI, która pozwala
użytkownikom modyfikować (przykroić) powstający projekt układu scalonego odpowiednio do potrzeb.
Złożoność układu ASIC może się mieścić w szerokim zakresie, od prostej logiki interfejsu aż do
pełnego procesora DSP, RISC, sieci neuronowej czy kontrolera z rozmytą logiką.
Technologia ASIC
Osiągnięte postępy w procesie wytwarzania układów wielkiej skali integracji umożliwiły opracowanie
dwóch zasadniczych technologii ASIC, a mianowacie CMOS i BiCMOS, w których osiągnięto
szerokość ścieżki 0.5
µ
m. W procesie CMOS można wytwarzać układy ASIC zawierające 250000
bramek lub więcej (generalnie bramkę określa się jako pojedynczą bramkę NAND). Z drugiej strony
tablice bramek BiCMOS (zawierające układy bipolarne i CMOS) umożliwiają większą szybkość
działania kosztem bardziej złożonego procesu wytwarzania i mniejszej gęstości upakowania.
Układy ASIC w technologii CMOS są oferowane w postaci macierzy standardowych komórek i
bramek. Wraz ze standardowymi komórkami rdzenie procesorów mogą być łączone z rozmaitymi
blokami pamięci i modułami logicznymi, zapewniając wielką elastyczność. Jednak koszt wytworzenia
prototypu jest znacznie wyższy. Z drugiej strony na macierzach bramek można również projektować
bloki pamięciowe i logiczne. Układ ASIC w technologii CMOS 0.8
µ
m może zawierać do 250000
bramek. W technologii CMOS 0.5
µ
m możliwe jest upakowanie do 600000 użytecznych bramek na
jednej strukturze.
Układ ASIC w technologii BiCMOS zawiera zarówno tranzystory CMOS jak i tranzystory
bipolarne wykorzystując technologię "sea of gates". Robocza częstotliwość przyrządów BiCMOS jest
stosunkowo wysoka (100 MHz) ze względu na (drive) pojemność tranzystorów bipolarnych. Jednak
gęstość upakowania jest mniejsza, przykładowo BiCMOS ASIC może zawierać tylko do 150000
bramek. W technologii BiCMOS 0.5
µ
m można otrzymać układ scalony, zawierający do 300000
użytecznych bramek.
Cyfrowo-analogowe
układy ASIC (mixed-signal ASIC) zawierają na tej samej strukturze
zarówno elementy analogowe, jak i cyfrowe, i są ostatnio oferowane przez kilku producentów. Układy
takie dają większe możliwości połączenia w całość złożonego systemu. Te utworzone na poziomie
struktury układu scalonego systemy mogą realizować mieszane zadania analogowo - cyfrowe, które

Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-4
przedtem mogły być realizowane dopiero na poziomie płytek drukowanych. Elementy analogowe
obejmują wzmacniacze operacyjne, komparatory, przetworniki A/C i C/A, wzmacniacze próbkujące
(sample-and-hold), wzorce napięcia oraz aktywne filtry RC. Elementy logiczne obejmują bramki,
liczniki, rejestry, mikrosekwentery, programowalne macierze logiczne PLA, pamięci RAM i ROM.
Elementy pośredniczące obejmują 8-mio i 16-to bitowe, równoległe porty wejścia/wyjścia oraz
synchroniczne porty szeregowe i układy UART.
Rdzenie RISC i DSP są oferowane przez kilku wytwórców i pozwalają projektować
zindywidualizowane, zaawansowane procesory według metodologii ASIC. Na pojedynczym układzie
scalonym użytkownik może składać jak z klocków kompletne moduły z rdzeni procesorów DSP, RISC,
pamięci oraz modułów logicznych, korzystając z narzędzi CAD. Przykładowo Texas Instruments
oferuje rdzenie DSP w układach rodzin C1x, C2x, C3x i C5x w postaci elementów ASIC. Każdy rdzeń
zaopatrzony jest w schemat, symulacyjny wykres czasowy, schematy rozmieszczenia elementów na
strukturze, oraz w zbiór przebiegów testowych.
Projektowanie układów ASIC
Proces projektowania układu ASIC składa się z trzech zasadniczych etapów:
a) projektu logicznego i symulacji,
b) rozmieszczenia elementów, poprowadzenia i sprawdzenia połączeń, oraz
c) opracowania maski rozkładu i wyprodukowanie prototypu.
Końcowy użytkownik może włączyć się do procesu projektowania wg. różnych schematów,
zwanych "semistandard", „semicustom" oraz "full-custom", zależnie od wymagań konkretnego
zastosowania. W schemacie "semistandard" użytkownik przekazuje swoje propozycje projektowe
producentowi ASIC. Producent modyfikuje projekt układu scalonego zgodnie z przyjętymi
uzgodnieniami.
15.3. Sterowniki programowalne - PLC
W systemach sterowania stosowany jest różny sprzęt komputerowy. Zwykle najniższy poziom struktury
sterowania bazuje na sterownikach programowalnych. W krajach wysoko uprzemysłowionych
programowalne sterowniki logiczne PLC (Programmable Logic Controllers) są podstawowym środkiem
sterowania i automatyzacji wszelkiego typu maszyn i urządzeń technologicznych o binarnej strukturze
funkcjonowania, takich jak obrabiarki, prasy, wtryskarki tworzyw sztucznych, linie zgrzewania,
urządzenia do transportu technologicznego, urządzenia malarskie i galwanizerskie, urządzenia
mieszająco-dozujące, sortujące, ważące itp. Stosuje się je także do automatyzacji całych procesów
technologicznych w hutnictwie, energetyce, przemyśle spożywczym, chemicznym, materiałów
budowlanych itp.
Rozwój systemów programowalnych sterowników logicznych rozpoczął się na początku lat
siedemdziesiątych i trwa do dziś. Na świecie istnieje ponad 100 liczących się firm produkujących kilkaset
modeli sterowników PLC. Największe znaczenie w produkcji i zastosowaniu mają USA, Niemcy, Japonia
i Francja. Większość firm produkuje sterowniki we wszystkich klasach wielkości, z bogatym
wyposażeniem wspomagającym programowanie, testowanie i uruchamianie systemów. Istotnym
zagadnieniem jest szybkie uzyskiwanie prawidłowo działających programów.
Sterowniki
spełniają szereg dodatkowych wymagań, których nie spełniają komputery biurowe.
Obostrzone wymagania dotyczą zakresu temperatury pracy, wilgotności, odporności na drgania i
wstrząsy, zapylenie, itp.
Zasada działania sterowników programowalnych
Programowalne sterowniki logiczne, najogólniej definiując, mają strukturę komputerów uniwersalnych,
lecz zorientowane są na procesy sterowania logicznego. Wynikają stąd dwie podstawowe ich
właściwości: programowanie zadań odbywa się z wykorzystaniem specjalnych języków zorientowanych
na zapis funkcji logicznych, a ich budowa jest dostosowana do bezpośredniego połączenia ze
sterowanym obiektem. Wykonywanie programu sterowania polega na szeregowo-cyklicznym
przetwarzaniu rozkazów programu. Kolejne rozkazy są wykonywane szeregowo jeden po drugim, a po
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-5
wykonaniu wszystkich cykl jest powtarzany, niezależnie od przebiegu sterowanego procesu
technologicznego. Cykl powtarzania programu jest na tyle szybki, że sterowany obiekt reaguje na
związki logiczne pomiędzy jego wejściami a wyjściami, wynikające z algorytmu jego pracy, tak jakby były
one realizowane równolegle w czasie rzeczywistym.
Bloki
układów wejścia/wyjścia służą do elektrycznego dopasowania sygnałów dwustanowych,
pochodzących ze sterowanego obiektu i wysyłanych przez sterownik do obiektu sterowanego. Bloki te
realizują również separację galwaniczną sterownika od obiektu sterowanego, zmniejszając zagrożenie
przed uszkodzeniem i przed zakłóceniami elektrycznymi systemu sterowania. Układy wejścia/wyjścia
umożliwiają bezpośrednie podłączenie sterownika do obiektu sterowanego.
Parametry sterowników programowalnych
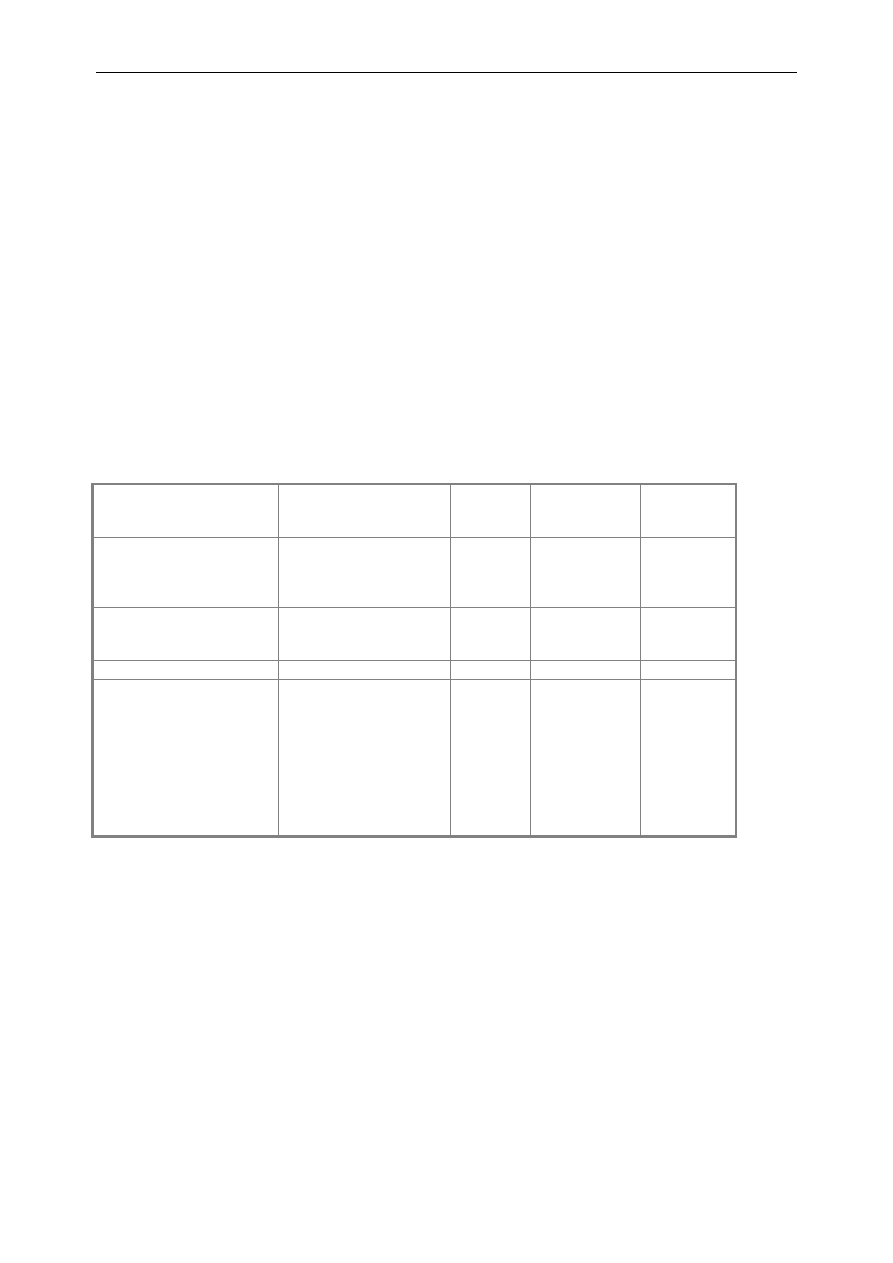
W tabeli 15.1. zawarto charakterystyczne parametry [3] niektórych producentów sterowników
programowalnych. Jedną z charakterystycznych cech sterowników jest liczba wejść i wyjść cyfrowych. W
większości zastosowań wystarcza niewielka liczba takich wejść i wyjść. Ponieważ program typowego
sterownika polega na cyklicznym wykonaniu tego samego ciągu instrukcji, dlatego szybkość sterownika
programowalnego określana jest przez czas wykonania tysiąca instrukcji. Proste programy sterownika
nie zajmują zbyt dużo miejsca w pamięci, dlatego typowe sterowniki wyposażane są w mniejszą pamięć
RAM niż komputery osobiste.
Tab. 15.1. Podstawowe parametry wybranych sterowników PLC
Firma
Typ
I/O
Szybkość
czas dla 1000
instrukcji
RAM
Allen-Bradley
Micrologix 1000
SLC 500
PLC-5
PLC-5/250
16-32
20-960
128-3072
do 4.1K
do 2ms
0.5-8ms
<1ms
<1ms
do 1Kb
1K-24Kb
8K-100Kb
do 8Mb
GE Fanuc Automation
90 Micro
Seria 90-30
Seria 90-70
14
1K
12K
1ms
0.18ms
0.4ms
6Kb
80Kb
512Kb
PEP Modular Computers Smart I/O
8-88
3Mb
Siemens
Simatic S5-90U
Simatic S5-95U
Simatic S5-100U
Simatic S5-115U
Simatic S5-135U/155U
Simatic TI500/TI505
Simatic S7-200
Simatic S7-300
Simatic S7-400
14-208
32-480
do 448
do 2K
32.8K
8.2K
64
1024
128K
2ms
2ms
0.8ms
0.1ms
0.18ms
0.06ms
0.8ms
0.3ms
0.08ms
4Kb
20Kb
20Kb
384Kb
1664Kb
1920Kb
4Kb
48Kb
512Kb
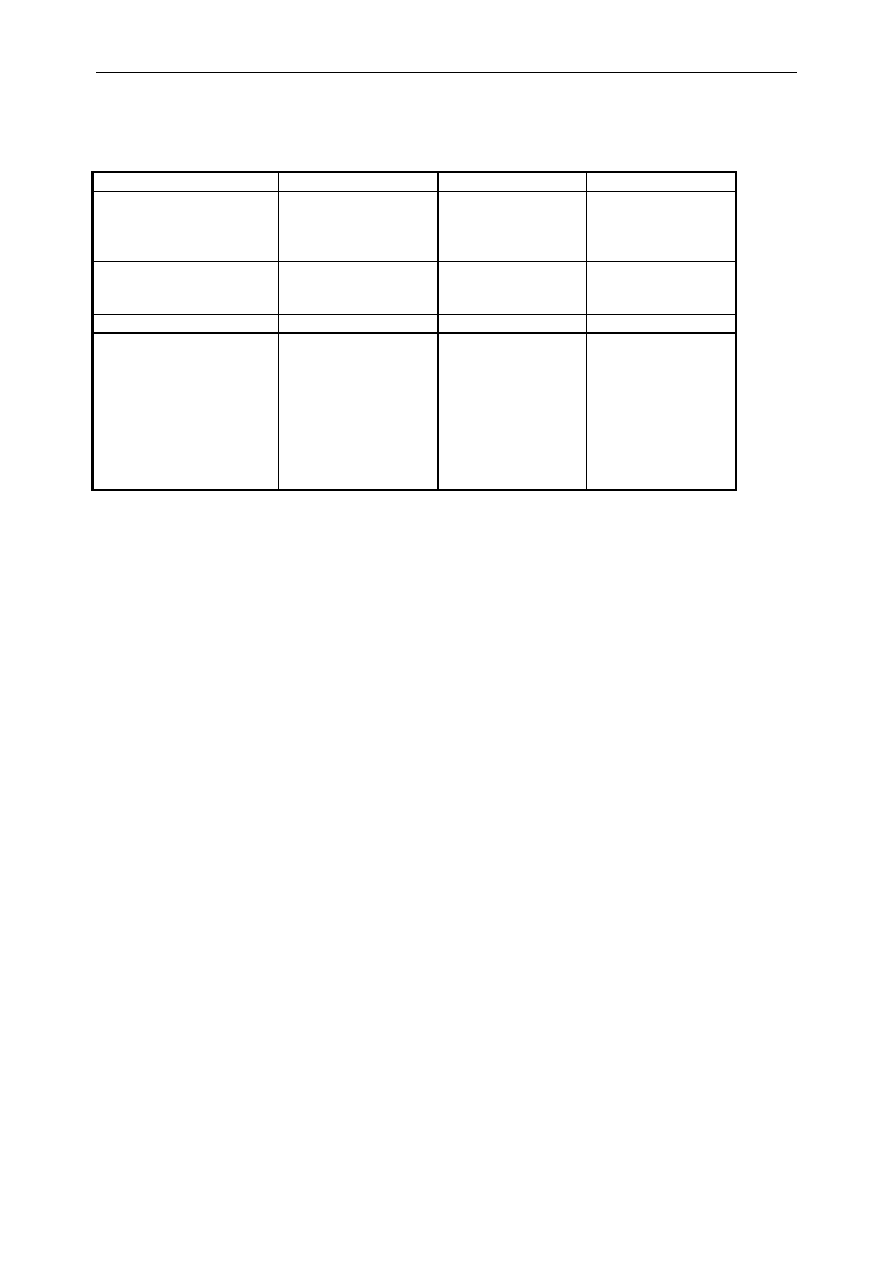
Sterowniki
mogą być przeznaczone nie tylko do wykonywania prostych operacji. Tabela 15.2
podaje różne rodzaje operacji, które mogą być realizowane przez sterowniki: r - zadania czasu
rzeczywistego, m - wielozadaniowość, II - moduły do obliczeń równoległych, f - obliczenia
zmiennoprzecinkowe, pid - sterowanie typu PID, fz - logika fuzzy.
Programowanie sterowników nie musi być realizowane na poziomie bliskim maszynie. Świadczy
o tym coraz bogatsze oprogramowanie oferowane dla sterowników programowalnych. W tab. 15.2
podawane są następujące typy oprogramowania: tr - pakiety treningowe, pc - oprogramowanie
komputerów osobistych (PC), iec- zgodność z IEC1131 dla wszystkich wariantów, f - bloki funkcyjne, i -
schematy drabinkowe, l - lista instrukcji, s - schematy przebiegu sekwencji instrukcji, h - programator
przenośny.
Coraz
większe wymagania związane są integracją sterownika z otoczeniem. Sterowniki
wyposażone są w różne sprzęgi umożliwiające transmisję danych. W tabeli 15.2 podano typy łączy
komunikacyjnych: e - Ethernet i jego odmiany, a - ARCnet, f -FIP, c - CAN, p-Profibus, l - LONWorks, m -
Modbus, m+ - Modbus+, s - Interbus-S, d - DeviceNet, as - ASInet, fo - światłowody (fibre optics), r - fale
radiowe.
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-6
Stosowane
są rozwiązania bazujące na języku naturalnym, przykładem może być narzędzie
CASE firmy Siemens o nazwie APT, którego celem jest zapewnienie prostoty programowania
sterowników.
Typ Operacje
Programowanie
Transmisja
Micrologix 1000
SLC 500
PLC-5
PLC-5/250
r
r,f,pid
r,f,pid,dmr
r,m,II,f,pid,dmr
pc, l, h
tr,pc,l,s,h
tr,pc,l,i,s,h
pc,l,s
m,d,fo,r
e,p,m,f,fo,r
e,m,d,fo,r
90 Micro
Seria 90-30
Seria 90-70
r,pid
r,pid,II
r,m,II,f,fz,pid,d/tmr
tr,pc,iec,l,i,h
tr,pc,iec,l,i,s,h
tr,pc,iec,l,s
m
e,f,c,m,d,s,d,r
e,f,p,m,s,d,sd,fo,r
Smart I/O
r,m
tr,pc,iec
p,m,d
Simatic S5-90U
Simatic S5-95U
Simatic S5-100U
Simatic S5-115U
Simatic S5-135U/155U
Simatic TI500/TI505
Simatic S7-200
Simatic S7-300
Simatic S7-400
r
r,fz
r,fz
r,f,pid,d,fz
r,f,II,pid,d,fz
r,f,pid,d
r
r,f,pid,fz
r,II,f,pid,fz
tr,pc,f,l,i,s,h
pc,f,l,i,s,h
pc,f,l,i,s,h
p,c,f,l,i,s,h
pc’C’,f,l,i,s,h
pc,l,i,APT
tr,pc,iec,l,i
tr,pc,iec,f,l,i,s
pc,iec,fl,is
as,m
p,m,as
as,m
e,p,m,m+,as,fo
e,p,m,m+,as,fo
a,p,m,m+,as,fo
RS485,ascii
p,as,fo,m+,RS485
e,p,as,fo,m,RS485
Tab. 15.2. Parametry wybranych sterowników PLC
Metody programowania sterowników
Dla języków programowania sterowników PLC opracowano standardy IEC (International
Electrotecnical Comission). Istnieje pięć podstawowych metod konstrukcji oprogramowania
sterowników w standardzie IEC 1131-3. Przykładem takiego zaawansowanego systemu jest pakiet
ISaGRAF, który uruchamiany jest pod Windows, natomiast aplikacje programowe uruchamiane są
na rodzinie sterowników PLC typu PEP 9000 w środowisku systemu operacyjnego czasu
rzeczywistego OS9. Funkcje pakietu są dostępne w dwóch trybach pracy, normalnym służącym do
konstruowania programu oraz drugim, służącym do kontroli działania programu. Program posiada
procedury testujące oraz możliwości podglądu wykonania programu w trybie symulacyjnym i na
systemie docelowym.
ISaGRAPH posiada pięć języków programowania zgodnych ze standardem IEC 1131-3, z których
można korzystać na raz w jednym programie. Są to:
- sekwencyjne schematy funkcyjne (SFC - Sequential Function Chart),
- bloki funkcyjne (FBD - Function Block Diagramm ),
- schematy drabinkowe (LD - Ladder Diagram ),
- lista instrukcji (IL - Instruction List),
- tekst strukturalny (ST - Structured Text ).
15.4. ISaGRAF Środowisko programowe sterowników
15.4.1. Opis własności środowiska ISaGRAF
ISaGRAF WDS jest bazującym na Windows, zintegrowanym środowiskiem programowym CASE
(Computer Aided Software Engineering) [1, 2, 5]. Cechuje go zgodność z IEC1131-3, nowym
międzynarodowym standardem językowym PLC. Aplikacje programowe uruchamiane są na rodzinie
kontrolerów PEP 9000 pod środowiskiem czasu rzeczywistego OS-9/68K. ISaGRAF WDS jest osadzony
w środowisku OS-9 jako w systemie nośnym. Wykonanie programu odbywa się przez wczytanie wejść,
wykonanie kodu oraz ustawienie wyjść. Po każdym takim cyklu wykonywane są inne zadania należące
do OS-9. Pod systemem RTOS-9 ISaGRAF kernel (ISaKER) jest wykonywany równolegle z innymi

Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-7
zadaniami komunikacyjnymi (ISATST). Struktura ta umożliwia klientowi uruchomić więcej niż jedną
aplikację ISaGRAFu oraz swoje własne zadanie OS-9 w tle.
Oprogramowanie posiada procedury testujące, funkcje symulacyjne i podglądu wykonania
zadania w systemie docelowym. Podgląd w programie umożliwiają te same okna, które służą do edycji
ale ze statusem procesu. Funkcje programu są dostępne w dwóch trybach pracy: normalnym, służącym
do konstruowania projektu i symulacyjnym, służącym do kontroli działania programu.
W trybie normalnym można wyróżnić składowe:
• edytory graficzne dla języków: schemat sekwencji funkcji (SFC - Sequential Function Chart),
schemat bloku funkcji (FBD - Function Block Diagram), schemat drabinkowy (LD - Ladder Diagram);
• edytory tekstowe dla języków: lista instrukcji (IL - Instruction List), tekst strukturalny (ST - Structured
Text), kodu C (opcjonalny);
• dodatkowe edytory dla deklaracji zmiennych, definicji, konfiguracji wejścia/wyjścia.
• zarządzanie projektem;
• zarządzanie bibliotekami: kart wejścia/wyjścia, procedur użytkownika w C, konwersji funkcji;
• zarządzaniem archiwizacją projektów i bibliotek;
• informacja (help).
W
oknie
środowiska, ISaGRAF Projects Management, podawany jest wykaz dostępnych
programów użytkownika. Wybieramy jeden z nich lub tworzymy nowy. Ukazuje się ISaGRAF Project, w
którym przedstawiony jest układ programu. W oknie podane są opcje służące do:
• wprowadzania poszczególnych elementów językowych lub segmentów w zależności od potrzeb
użytkownika,
• definiowania zmiennych binarnych, analogowych, czasowych oraz komunikatowych, ich adresów i
możliwych stanów,
• ustawiania list zmiennych, szczególnie przydatnych w dużych projektach,
• tablic konwersji zmiennych,
• ustawiania konfiguracji kart podpiętych do programowanego urządzenia,
• weryfikacji poprawności programu,
• kompilacji do postaci wykonywalnych,
• symulacji programu.
Jeżeli program został napisany zgodnie z zasadami programowania w dostępnych językach,
przeprowadzana jest weryfikacja i kompilacja programu. Po uruchamieniu symulacji ukazuje się okno
Debuggera oraz okno Kernela przedstawiające stan wejść/wyjść, które można dowolnie zmieniać.
Możliwe jest również otwarcie okien dowolnych zmiennych zarówno lokalnych jak i globalnych, a także
można stale obserwować dowolną zmienną, jak również nadawać jej żądane wartości. Możemy ponadto
obserwować przebieg procesu w edytorach poszczególnych języków. W tym przypadku nie jest możliwa
żadna zmiana wewnątrz struktury programu. Mając do dyspozycji sterownik możemy załadować
program, dokonując wcześniej połączenia za pośrednictwem opcji Debug. Okno dialogowe informuje o
trybie pracy i aktualnej aplikacji znajdującej się w sterowniku. Przed załadowaniem nowej aplikacji,
należy zatrzymać wykonanie aplikacji poprzednio załadowanej. Po umieszczeniu nowego programu za
pomocą opcji Download podawany jest komunikat o aktywności aplikacji i status pracy RUN. W czasie
pracy można obserwować wartości zmiennych lub uruchomić przygotowaną wcześniej wizualizację
procesu.
15.4.2. Symulacja wykonania aplikacji
Symulator kernela umożliwia symulację pracy sterownika. Karty wejścia/wyjścia są graficznie
uwidocznione w oknie systemu Windows. W tym przypadku karty wejścia/wyjścia definiowane są jako
karty wirtualne (virtual board). Oprócz okna zmiennych wirtualnych wejść/wyjść możliwy jest też podgląd
wszystkich zmiennych wewnętrznych lokalnych i globalnych za pośrednictwem okien: zmiennych
binarnych, zmiennych analogowych, zmiennych czasowych, komunikatów, bloków funkcyjnych.
Symulator kernela zawsze pracuje z aktualną aplikacją. Ważne jest, aby przed użyciem symulatora
wybrać opcję przygotuj program do symulacji (prepare code for simulation).

Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-8
Symulator pracy sterownika znacznie ułatwia sprawdzenie poprawności działania programu
użytkownika. Wygodna, graficzna obsługa wejść/wyjść daje możliwość przetestowania wszelkich
możliwych sytuacji stanu systemu, co jest utrudnione na urządzeniach rzeczywistych.
Wizualizacja graficzna tworzona przez użytkownika za pomocą opcji "Graphics" umożliwia
przedstawienie projektu w sposób obrazowy i przejrzysty. Użytkownik ma do wyboru następujące
elementy tworzące kompletny obraz:
• tło rysunkowe - stworzony np. pod PaintBrusch plik formatu BMP pomaga we wzrokowym
usytuowaniu i przejrzystości zastosowanych elementów,
• binarna ikona graficzna - obrazuje stany logiczne prawdy i fałszu. Stosuje się do tego celu
standardowe ikony systemu Windows,
• pole graficzne - element w kształcie prostokąta, wypełniany dowolnym kolorem w dowolnym kierunku.
Obrazuje stopień wypełnienia lub wykorzystania zmiennej w deklarowanych granicach,
• pole numeryczne - zmienna jest przedstawiana za pomocą cyfr dziesiętnych.
Tablice
konwersji
stanowią wygodny dla użytkownika blok służący, do przeliczania poziomu
sygnałów elektrycznych (przychodzących z karty zewnętrznej) na wielkości fizyczne. W zależności od
ilości punktów charakterystycznych, zostają automatycznie stworzone wykresy funkcji zależności.
Blok kontroli aplikacji stanowi rozbudowaną częścią programu, służącą do pełnej kontroli
aplikacji uruchomionej na urządzeniu wykonawczym. Do dyspozycji mamy te same okna, które służą do
projektowania, jednak bez możliwości zmian. Umożliwia to pełny podgląd: zmiennych wszystkich
dostępnych typów, wykonania programu w dowolnej jego części w dowolnym języku, stanu wejść/wyjść
poszczególnych modułów. Celem tego bloku jest zarządzanie aplikacją, polegające na: załadowaniu
kodu programu na urządzenie, jego uruchomienie bądź zatrzymanie, śledzenie wykonania krok po
kroku, zmianę czasu wykonania pętli programowej i pełną komunikację błędów. Zamknięcie tego okna
powoduje zakończenie śledzenia wykonywanego programu.
Biblioteki
zawierają sterowniki poszczególnych modułów, umożliwiające poprawne ich
wykorzystanie, deklaruje się je potem w czasie łączenia poszczególnych wejść/wyjść. Oprócz tego
zawierają elementy napisane w języku C: procedury - funkcje C, bloki funkcyjne, funkcje konwersji.
Archiwizacja
dokonywana jest przy użyciu programu Archive, który umożliwia pakowanie i
archiwizacje projektów, sterowników modułów, funkcji, bloków języka C.
15.5. Opis języków programowania systemu ISaGRAF
Cały program użytkownika jest podzielony na trzy główne segmenty:
- BEGIN program wykonywany na początku każdego cyklu, służy do obsługi zmiennych wejściowych;
- SEQUENTIAL program wykonywany według kodu języka SFC, używany do opisu właściwej części
programu;
- END program wykonywany na końcu każdego cyklu, służy do obsługi zmiennych wyjściowych.
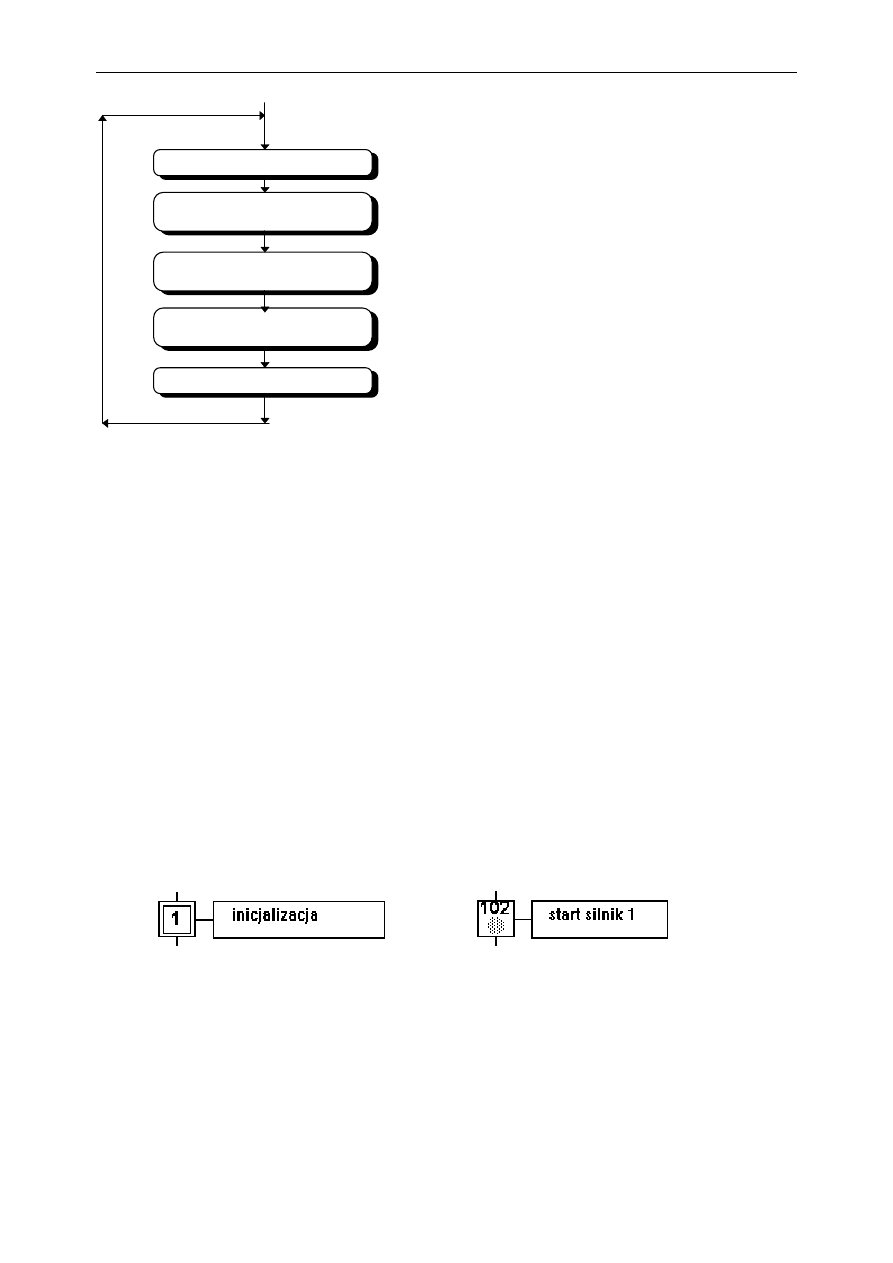
Cykl wykonania instrukcji sterownika programowalnego przedstawia rysunek 15.3.
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-9
Pobierz dane wejściowe
Przetwarzaj sekcję BEGIN
programu
Przetwarzaj sekcję
sekwencyjną programu
Przetwarzaj sekcję END
programu
Wyprowadź dane wyjściowe
Rys. 15.3. Zasada cyklicznego wykonywania programu PLC
Program główny oraz akcje zawarte w sekcji sekwencyjnej muszą być przedstawione w SFC. Natomiast
procedury mogą być pisane przy pomocy innych dostępnych języków. Również w samym edytorze SFC
znajdują się okna pokrewne z innymi językami programowania. Możliwa jest też współpraca z
procedurami napisanymi w języku C.
15.5.1. Sekwencyjne schematy funkcyjne
Sekwencyjne schematy funkcyjne SFC (Sequential Function Chart) tworzą język graficzny, służący do
opisu operacji wykonywanych sekwencyjnie. Proces jest reprezentowany przez definiowane bloki,
łączone również definiowalnymi przejściami. Definicja bloków może być dokonana przez użycie
pozostałych języków (ST, IL, LD, FDB), natomiast przejście musi zawierać warunek logiczny.
Składowe języka:
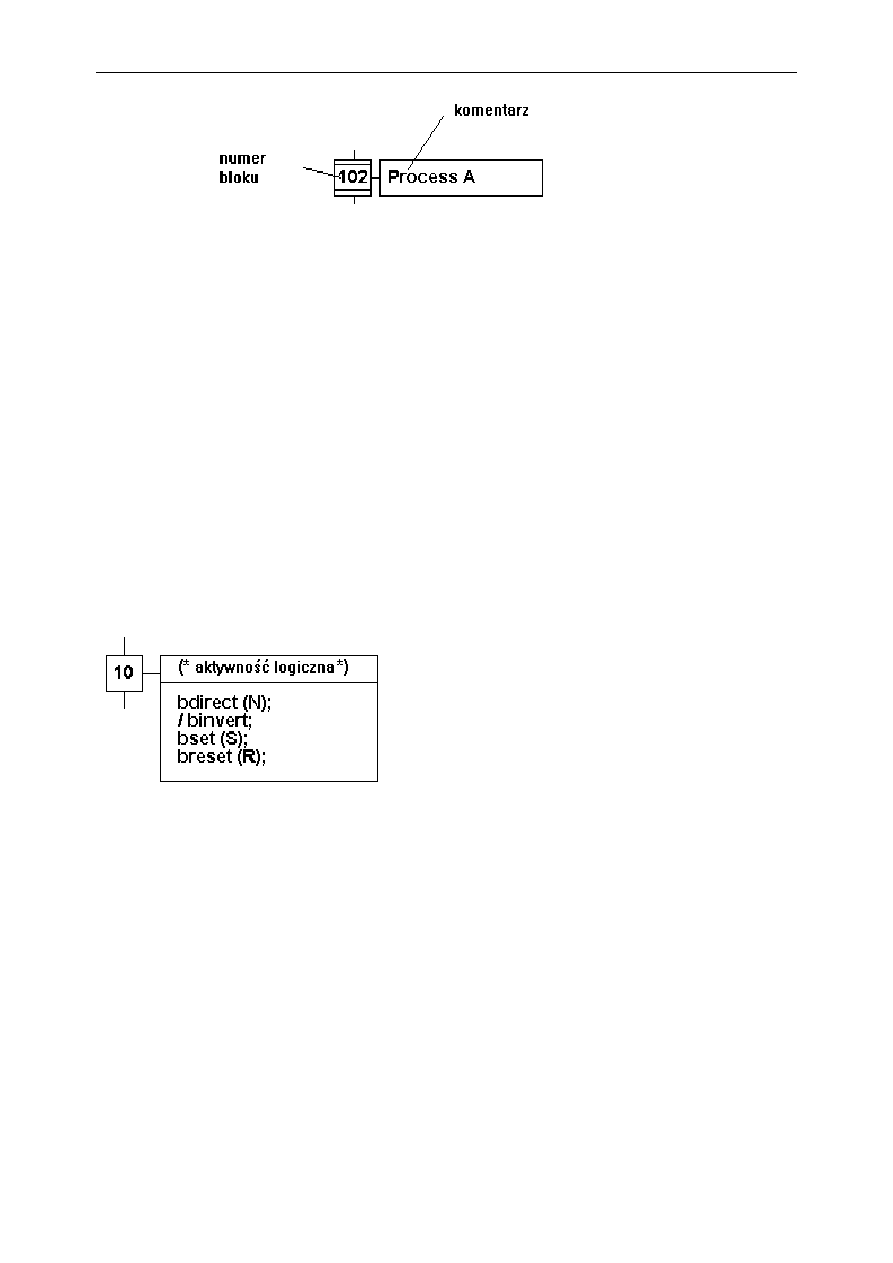
Bloki i bloki inicjalizacyjne - reprezentowane są jako pojedyncze prostokąty (rys. 15.4). Każdy blok jest
oznaczony numerem automatycznie nadawanym przez program lub definiowanym przez użytkownika.
Oprócz numeru blok może mieć nadany identyfikator znakowy - krótki opis, nie będący kodem
programu. Aktywność bloku w czasie działania programu sygnalizuje podświetlenie bloku szarym
okręgiem. Atrybutem bloku, służącym do reprezentacji bloku w innych językach lub do identyfikacji bloku
podczas kompilacji i przyporządkowaniu błędów, jest symbol: GSnnn.x (zmienna logiczna), GSnnn.t
(zmienna czasowa). Gdzie nnn oznacza numer bloku.
Rys. 15.4. Przykłady bloków
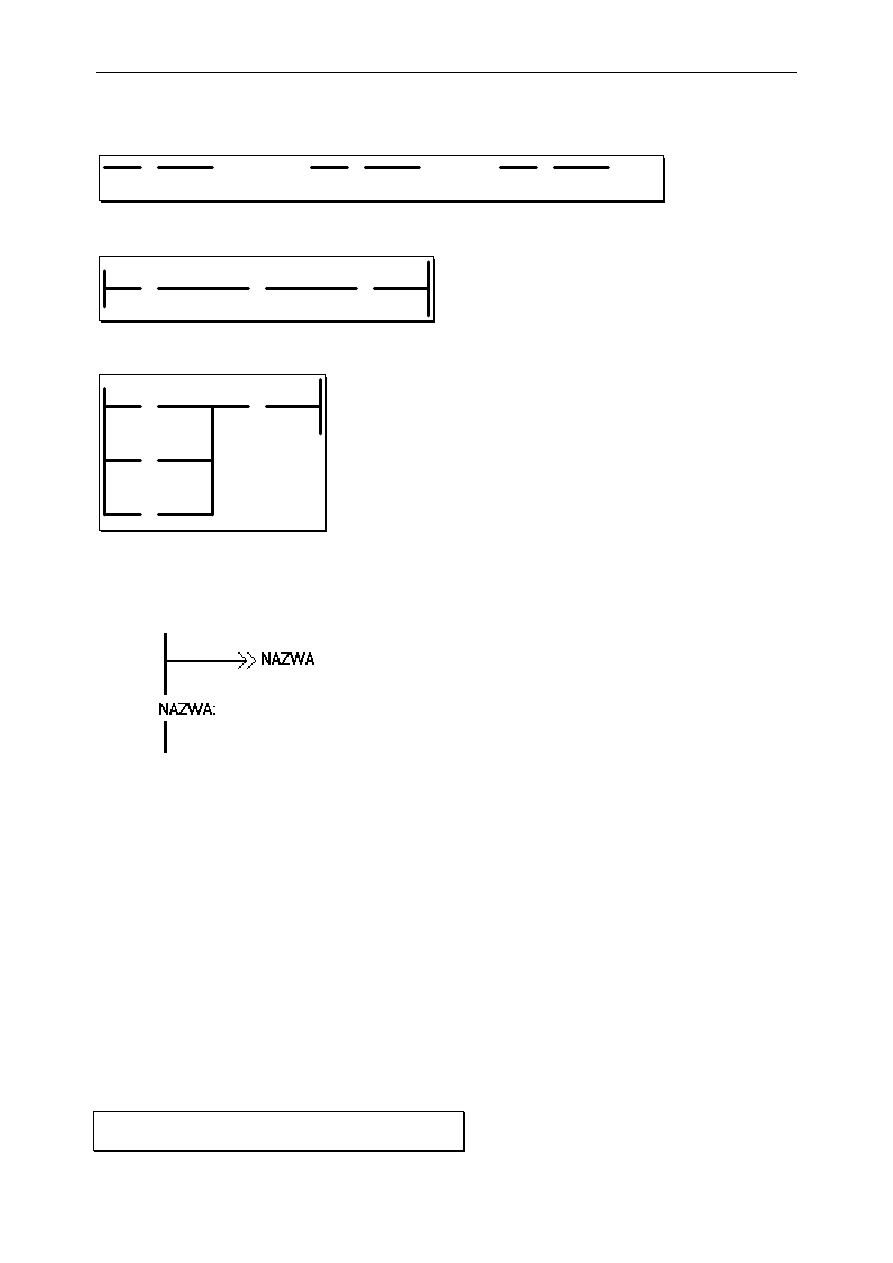
Przejścia - reprezentowane przez grubszą linię umieszczoną w poprzek linii łączących elementy (rys.
15.5). Każde przejście opisane jest przez numer identyfikacyjny, umieszczony obok przejścia. Przejściu
można również nadać komentarz - krótki opis nie będący kodem programu.
Pojedyncze linie łączące - służą do łączenia bloków i przejść. Symbolizują przechodzenie punktu pracy
programu przez elementy składowe.
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-10
102
Zezwolenie na Start
numer
przejścia
komentarz
Rys. 15.5. Opis przejścia
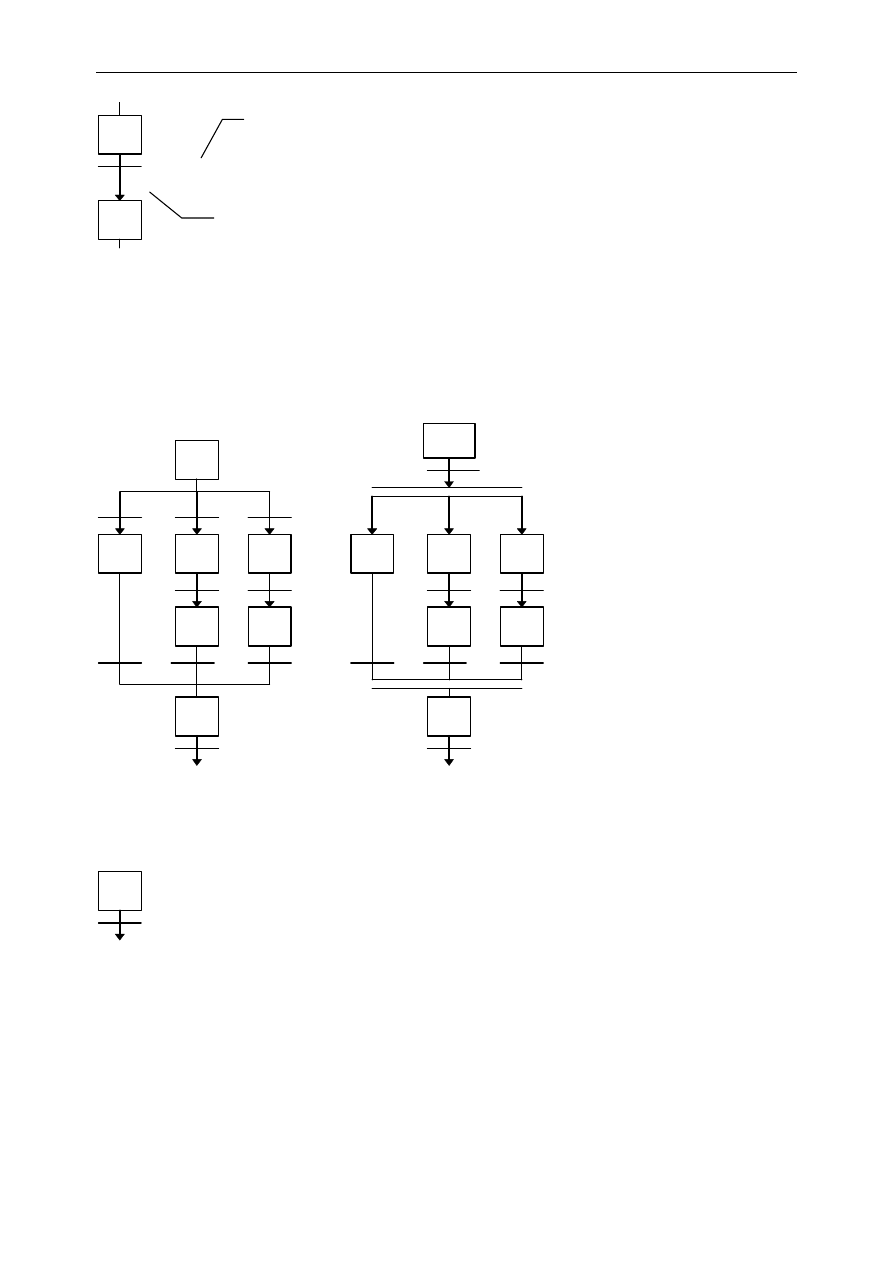
Pojedyncze linie rozgałęzione - służą do połączenia jednego bloku z wieloma przejściami (rys. 15.6.a).
Praktyczne umożliwia to wybór jednej z dróg dla której spełniony jest warunek przejścia.
Podwójne linie łączące - służą do połączenia jednego przejścia z kilkoma blokami (rys. 15.6.b), których
instrukcje wykonywane są dalej równolegle.
Metoda ta może być traktowana jako zastosowanie pojęć sieci Petriego. Miejsca sieci
Petriego odpowiadają krokom SFC, natomiast przejścia sieci Petriego odpowiadają przejściom SFC.
Przejścia definiują warunki przejścia z jednego kroku, do następnego.
1
4
e
3
c
6
h
7
i
5
f
8
k
d
g
j
1
a
4
3
6
7
i
5
f
8
k
d
g
j
Rys 15.6. Sekwencja kroków z: (a) alternatywnymi gałęziami, (b) równoległymi gałęziami
Skoki do bloków - mogą być użyte do przeniesienia punktu pracy z przejścia do bloku. Skok
symbolizuje strzałka z numerem bloku, do którego skok jest skierowany (rys. 15.7).
102
Rys. 15.7. Zapis skoku
Blok makra - zawiera bloki i przejścia łączone w standardowy sposób, lecz traktowane jako odrębna
część zamknięta w jednym bloku makra (rys. 15.8).
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-11
Rys. 15.8. Blok makra
Wywołanie procedury - powoduje przejście wykonywania instrukcji do procedury zawartej w ramce.
Funkcja zwraca wartość będącą rezultatem poprawności jej wykonania.
<rezultat> := <procedura> ();
Konwersja IL - bloki SFC można opisać także za pomocą IL. Tą część kodu należy umieścić w ramach
ograniczonych rozkazami: #info=IL .................... #endinfo
Reguły układu i wykonania programu: bloki i przejścia łączone są liniami pojedynczymi lub złożonymi,
poszczególne części programu mogą być grupowane i wywoływane jako makra, blok nie może
następować bezpośrednio po bloku, przejście nie może następować po przejściu, to samo makro nie
może być użyte więcej niż jeden raz w programie, program FSC nie mający programu nadrzędnego jest
nazywany main, program ten jest uruchamiany przy starcie aplikacji, podprogram może mieć tylko
jednego właściciela, podprogram może być kontrolowany tylko przez jego właściciela, właściciel nie ma
wpływu na podprogram wywoływany w podprogramie, jeżeli przejście nie posiada instrukcji, to jego
wartość logiczna wynosi 1.
Typy aktywności bloków
Aktywność logiczna - przypisuje aktywność zmiennym logicznym przy aktywności bloku. Działanie to
ilustruje rysunek 15.9. Przy czym zmienna logiczna musi być zmienną wewnętrzną lub wyjściową.
Rys. 15.9. Zapis aktywności logicznej
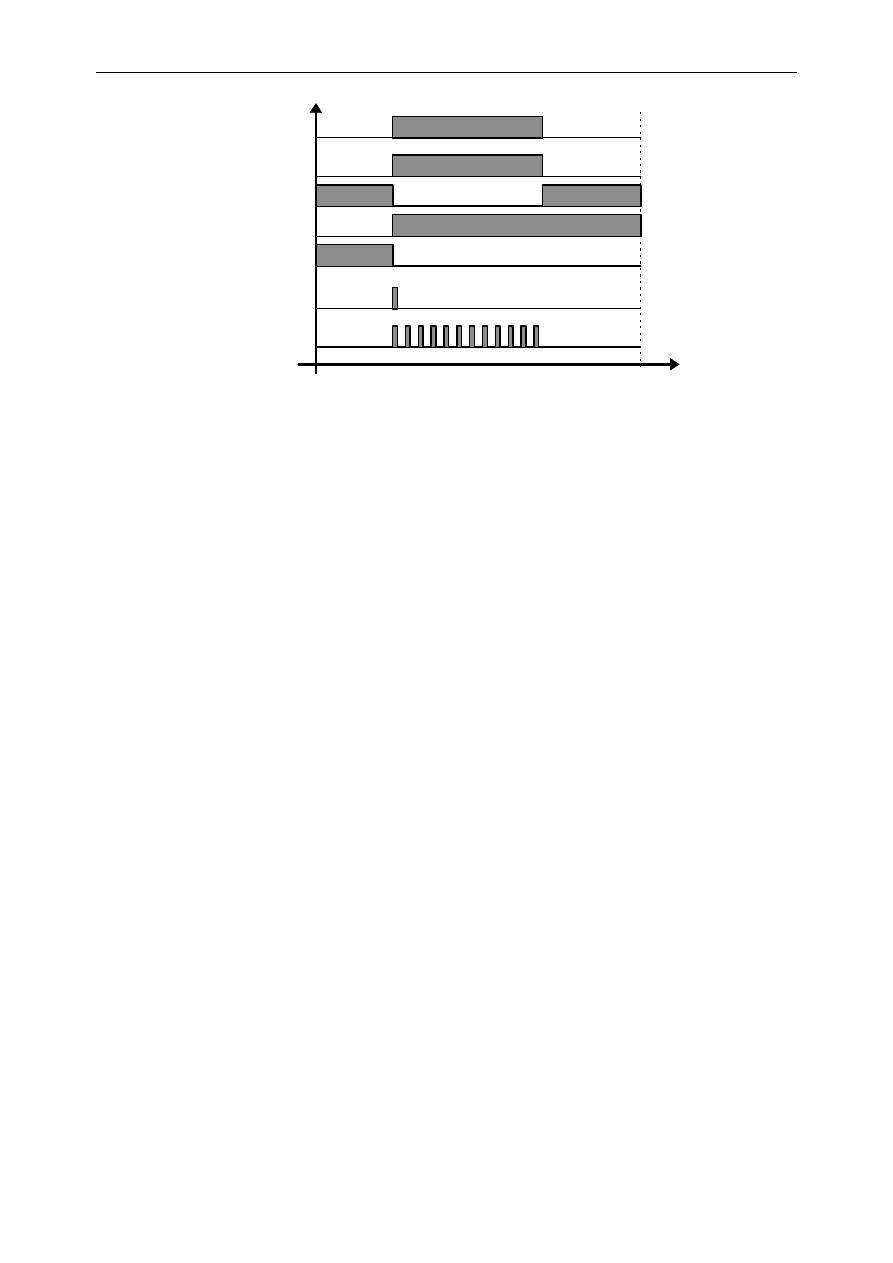
Aktywność pulsacyjna - powoduje, że instrukcja wykonywana jest tylko raz w przypadku aktywności
bloku (rys. 15.10). Ten rodzaj aktywności uzyskiwany jest przez umieszczenie instrukcji w części
ograniczonej rozkazami ACTION (P) i END_ACTION;
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-12
aktywność bloku
aktywność logiczna - bidirect
aktywność logiczna - binvert
aktywność logiczna - bset
aktywność logiczna - breset
aktywność pulsacyjna
aktywność bez pamięci
t
Rys. 15.10. Typy aktywności
Aktywność bez pamięci
- instrukcje są wykonywane w każdym cyklu podczas aktywności bloku (rys.
15.10). Ten rodzaj pracy uzyskuje się przez zamknięcie w klamry rozkazów ACTION (N) i
END_ACTION;
Aktywność SFC
- umożliwia zarządzanie podprogramami na podobnych zasadach, jak akcja
zmiennych logicznych. Jej uruchomienie następuje przez podanie nazwy podprogramu i parametru:
<pod_program> (N) - uruchamia podprogram, gdy blok jest aktywny oraz kończy wraz z
dezaktywacją bloku. (N) jest parametrem opcjonalnym;
<pod_program> (S) - startuje podprogram;
<pod_program> (R) - zatrzymuje podprogram.
Przyporządkowanie warunków do przejść
Konwersja
języka ST
- przejście osiąga stan prawdy, gdy wyrażenie napisane w języku ST jest
prawdziwe. Konwersja języka IL - jeżeli aktualna wartość akumulatora jest równa 0, przejście nie jest
aktywne. Uaktywni się wówczas, gdy wartość akumulatora będzie się różnić od zera. Wywołanie
procedury
- wywołana przy przejściu procedura musi po wykonaniu zwrócić wartość różną od zera, aby
uaktywnić przejście.
Sterowanie podprogramem przez program nadrzędny
realizowane jest przez instrukcje:
Gstart - uruchamia podprogram, Gkill - zatrzymuje podprogram wraz z jego podprogramami, Gfreeze -
zawiesza wykonanie podprogramu, Grst - ponownie restartuje zawieszony podprogram, Gstatus -
pobiera aktualny status podprogramu.
15.5.2. Bloki funkcyjne
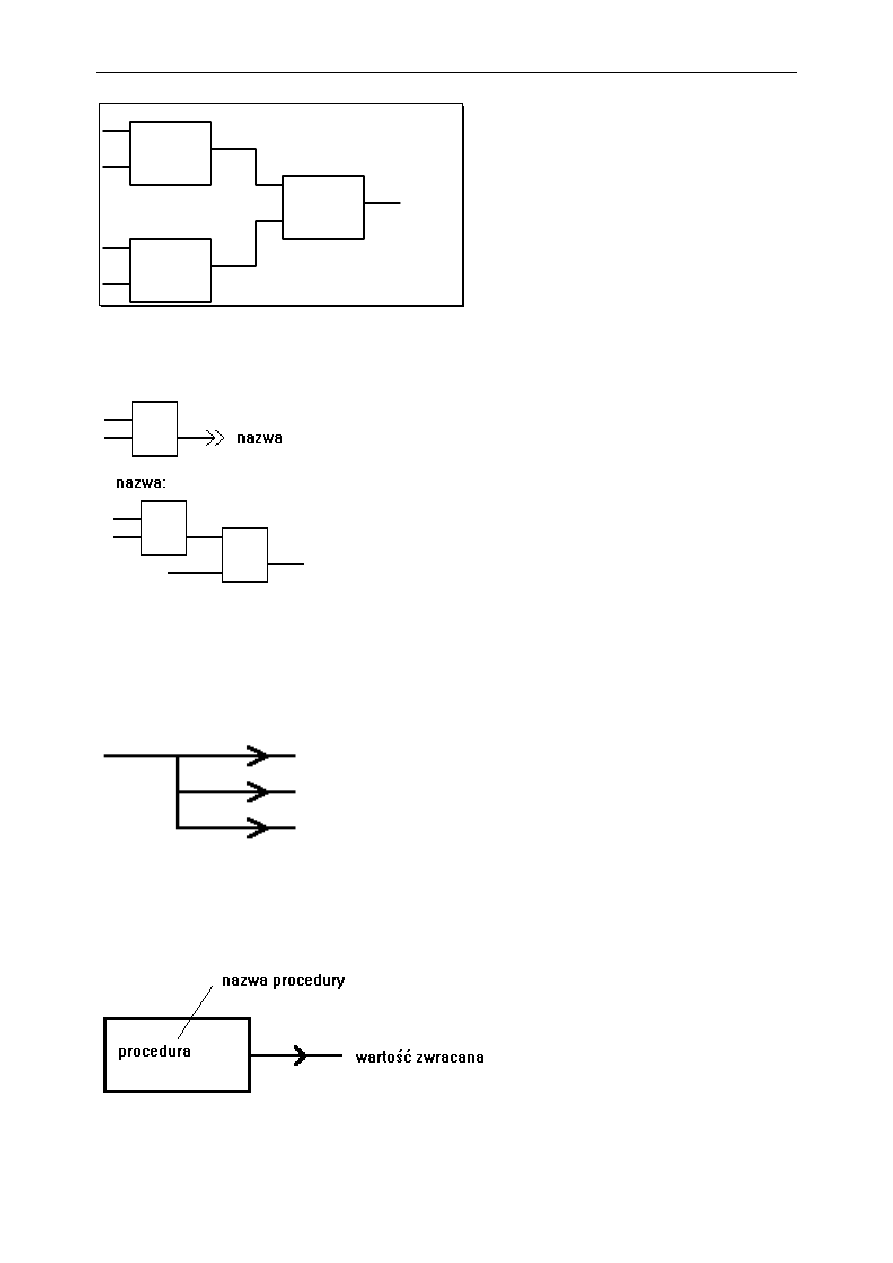
Bloki funkcyjne FBD (Functional Block Diagram) są graficznym językiem, umożliwiającym budowę
całościowych procedur przez pobieranie bloków funkcyjnych z bibliotek i ich łączenie. Elementy języka
FBD opisują zależność funkcyjną pomiędzy zmiennym wejściowymi a wyjściowymi.
Bloki funkcyjne
Bloki funkcyjne wywodzą się ze schematów obwodów cyfrowych. W standardzie IEC wyróżnia się
funkcje i bloki funkcyjne. Zakłada się, że obiekt typu funkcja posiada tylko jedne wyjście i dla tych
samych wejść wydaje tą samą wartość wyjścia. Bloki funkcyjne posiadają kilka wyjść i dla tych
samych wartości wejść mogą posiadać różne wartości wyjść, ze względu na wewnętrzne sprzężenia
zwrotne i pamięć. Funkcje i bloki funkcyjne mogą być zdefiniowane hierarchicznie.
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-13
>=1
>=1
&
a
b
c
d
k
k= (a+b)*(c+d)
Rys 15.11. Przykład użycia prostych bloków funkcyjnych
Funkcje lub bloki funkcji mogą realizować przetwarzanie binarne, numeryczne, analogowe lub
znakowe. Rysunek 15.11 przedstawia użycie prostych bloków funkcyjnych.
Rys. 15.12. Sposoby łączenia bloków
Bloki
funkcyjne
łączone są liniami, przy czym ważne jest, aby lewy koniec linii nie znajdował się
wyżej niż prawy, gdyż diagram programu rozpatrywany jest kolejno z góry w dół. Pojedyncza linia może
łączyć: zmienną wejściową z wejściem funkcji, wyjście funkcji ze zmienną wyjściową, wyjście funkcji z
wejściem innej funkcji. Linie rozgałęziającą tworzymy na tych samych zasadach pamiętając również aby
prawy koniec nie przewyższał lewego (Rys. 15.12 i 15.13).
Rys. 15.13. Rozgałęzienie linii
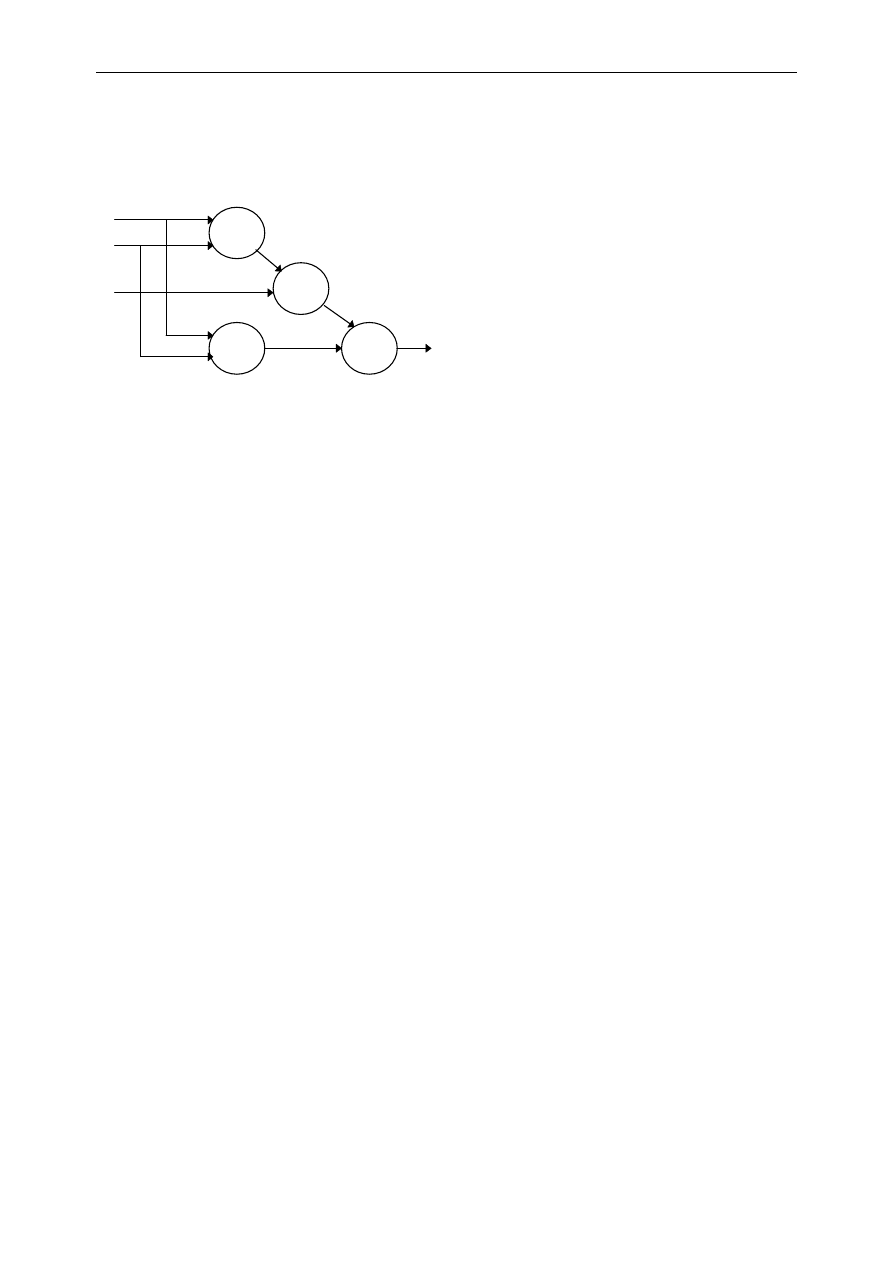
W przypadku, gdy linia jest zakończona kółkiem, oznacza to logiczne zaprzeczenie
przenoszonego sygnału. Wywołanie procedury przeprowadza się przez wstawienie bloku, który ją
obrazuje ( rys. 15.14). Nazwa procedury widnieje wewnątrz bloku. Natomiast wyjściem z procedury jest
zwracana przez nią wartość.
Rys. 15.14. Zapis bloku procedury
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-14
Standardowe bloki funkcyjne
Biblioteka ST
posiada podprogramy umożliwiające operacje: manipulacji na zmiennych
(przyporządkowanie), logiczne (AND, OR, EXOR), operacje arytmetyczne (dodawanie, odejmowanie,
mnożenie, dzielenie), operacje na bitach (maska z użyciem AND, OR, EXOR), operacje porównania,
operacje konwersji, operacje na znakach, operacje systemowe (łączność z systemem).
Biblioteka bloków funkcji C
zawiera:
• manipulacje danymi logicznymi: ustawialny przerzutnik bistabilny, kasujący przerzutnik bistabilny,
wykrywanie powstania brzegu, wykrycie opadania brzegu, semafor,
• liczniki: licznik w górę, licznik w dół, licznik w górę i w dół,
• zegary: opóźnienie przy sygnale 1, opóźnienie przy sygnale 0, zegar pulsacyjny,
• manipulacje danymi całkowitymi: pełne porównanie bloku funkcyjnego, stos,
• procesy dotyczące sygnałów analogowych: przepełnienie, histereza, alarm z ograniczeniem,
połączenie z czasem, różnice czasu,
• regulator PID,
• generacje sygnału: generator sygnału logicznego.
Biblioteka funkcji C
zawiera funkcje matematyczne, trygonometryczne, kontroli rejestrów (przesunięcia,
przeniesienia), manipulacji danymi (minimum, maksimum, modulo, multiplekser 4 lub 8 wejść,
parzystość, generator liczb losowych, selektor logiczny 0), konwersji danych, realizujące operacje na
łańcuchach znaków i tablicach.
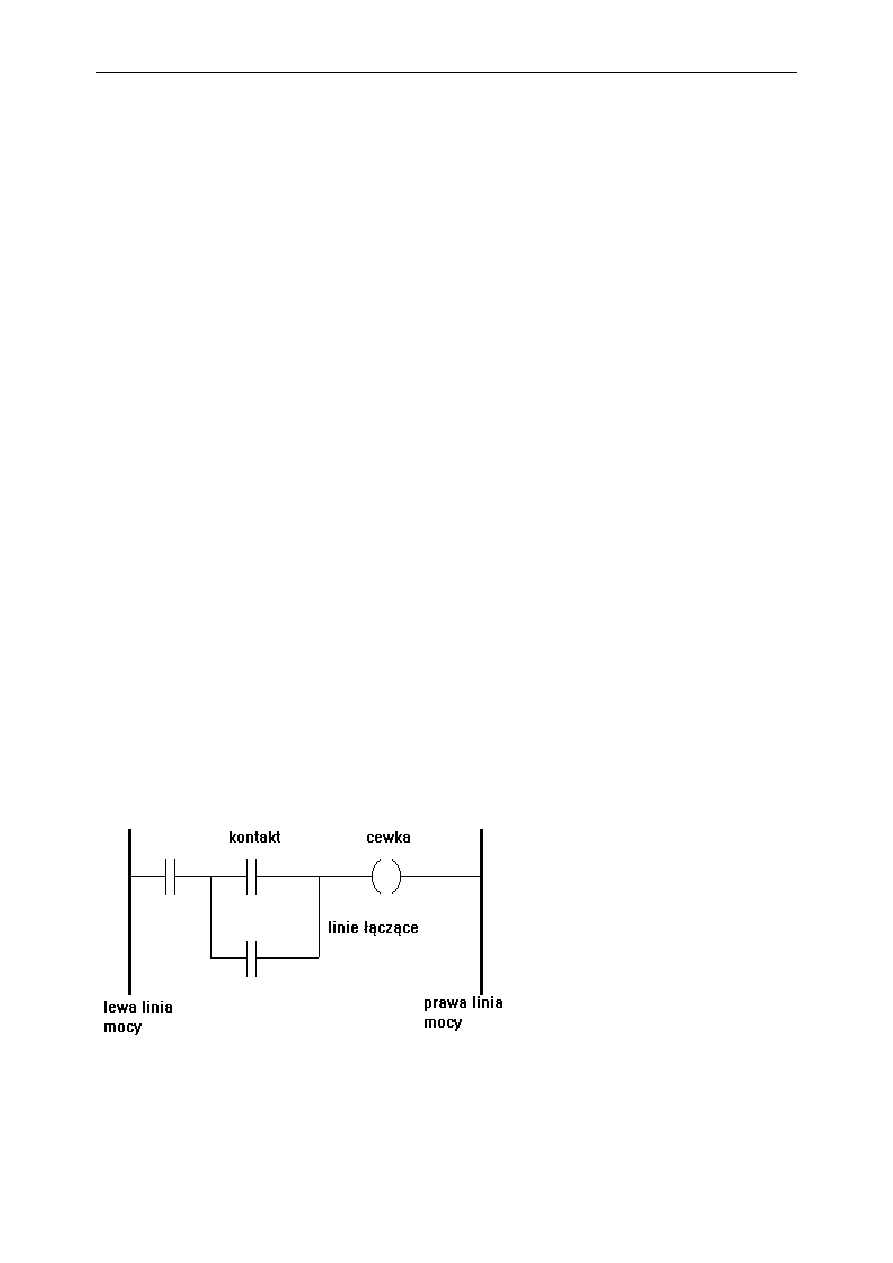
15.5.3. Schematy drabinkowe
Schematy drabinkowe LD (Ladder Diagram) są graficzną reprezentacją logicznych równań przez układ
graficznych symboli. Diagram LD zawiera się pomiędzy lewą i prawą szyną mocy, do których jest
dołączony (rys. 15.15). Elementy mogą być łączone liniami pojedynczymi lub grupowymi. Lewa szyna
mocy, jak również wszystkie linie połączone z nią, posiadają stan logiczny prawdy. Stan ten jest
przenoszony przez kontakt w przypadku, gdy jest zamknięty. Każdy kontakt jest przyporządkowany
zmiennej wejściowej lub wewnętrznej. Gdy zmienna przyjmuje stan 1, kontakt ulega zamknięciu. Gdy
linia połączona z cewką posiada "moc", to cewka jak również przyporządkowana do niej zmienna
wyjściowa zostają uaktywnione (przyjmują wartość 1).
Kontakt
może występować w różnych modyfikacjach: standardowy, zanegowany - (/),
uaktywniany zboczem narastającym - (P), uaktywniany zboczem opadającym - (N). Z kolei cewki mogą
mieć postać: standardową, zanegowaną - (/), ustawialną - (S), kasowalną - (R).
Rys. 15.15. Przykład schematu drabinkowego
Schematy drabinkowe reprezentują formalizm elektrycznych diagramów połączeń stosując
sterowanie bazujące na przełącznikach binarnych. Wadą tych schematów jest to, że jeżeli mają być
zaprogramowane nie tylko operacje binarne, to schematy te muszą być rozszerzone o dodatkowe
elementy. Rysunek 15.16 podaje podstawowe elementy schematów drabinkowych, natomiast
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-15
rysunki 15.17 i 15.18 przedstawiają sposób użycia elementów dla połączenia szeregowego i
równoległego.
] [
( )
]/ [
Włączone
Wyłączone
Ustawienie
Rys 15.16. Podstawowe elementy schematów drabinkowych
] [
( )
]/ [
A
B
P
Rys 15.17. Połączenie szeregowe
P
A
B
=
*
_
] [
( )
]/ [
] [
A
B
C
P
Rys 15.18. Połączenie równoległe
P
A
B
C
=
+
+
_
Elementami łączonymi tylko z lewej strony do linii sygnałowych są: instrukcja powrotu - RETURN -
powodująca przerwanie wykonywania programu i instrukcja skoku - umożliwiająca przejście
wykonywania programu do miejsca oznaczonego etykietą (rys. 15.19).
Rys. 15.19. Przykład zapisu instrukcji skoku
15.5.4. Tekst strukturalny
Tekst strukturalny ST (Structured Text) ma składnię podobną do języka Pascal. W języku ST
zdefiniowane są instrukcje podstawiania, wyboru IF i CASE, iteracyjne FOR, WHILE, REPEAT,
wywołanie funkcji lub bloku funkcji oraz przerwania wykonania funkcji. Język ST stanowi główne
narzędzie do budowy złożonych procedur, dlatego nie może być przedstawiony jako język graficzny.
Domyślnie używa się go przy opisie akcji w blokach i przejściach SFC. Program ST jest listą wyrażeń
zakończonych średnikiem, będącym separatorem instrukcji.
Typy wyrażeń języka ST:
-
przyporządkowanie: zmienna := wyrażenie;
-
wywołanie podprogramu lub funkcji C:
zmienna := podprogram (par1,par2,...);
- wywołanie bloku funkcji C: nazwabloku (par1,par2,...); rezultat := nazwabloku.par1;
- wyrażenie wyboru:
IF
wyr_logiczne THEN wyrażenie;
ELSE
wyrażenie; END_IF;
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-16
- pętle:
FOR
ind:=min TO max BY krok
DO
wyrażenie; END_FOR;
WHILE
wyr_logiczne DO
wyrażenie; END_WHILE;
REPEAT
wyrażenie; UNTIL
war_logiczny; END_REPEAT;
- powrotu:
RETURN;
Operatory języka:
- nawiasy (maksymalnie 8 w wyrażeniu),
- funkcje konwersji:
zmienna
:=
BOO
(wyrażenie); zmienna := ANA (wyrażenie); zmienna:=REAL(wyrażenie);
zmienna
:=
TMR
(wyrażenie); zmienna := MSG (wyrażenie);
- operatory logiczne:
zm_logiczna
:= NOT (wyr_logiczne);
rez_logiczny := wyr_log1 AND wyr_log2;
rez_logiczny := wyr_log1 OR wyr_log2;
rez_logiczny := wyr_log1 XOR wyr_log2;
brzeg
:=
REDGE
(wyr_logiczne,zm_pam);
brzeg := FEDGE (wyr_logiczne,zm_pam);
- operatory arytmetyczne:
wynik := wyr1 * wyr2; wynik := wyr1 / wyr2; wynik := wyr1 + wyr2; wynik := wyr1 - wyr2;
- porównania,
wynik := wyr1 < wyr2; wynik := wyr1 > wyr2; wynik := wyr1 <= wyr2;
wynik := wyr1 >= wyr2; wynik := wyr1 = wyr2; wynik := wyr1 <> wyr2;
Rozszerzenia języka ST:
- sterowanie zegarem (zmienne zegarowe): TSTART, TSTOP;
- zarządzanie programami (podprogramy): GSTART, GKILL, GFREEZE, GRST, GSTATUS;
- wyrażenie systemowe:
zm_analog
:=
SYSTEM
(rozkaz, argument);
- wyrażenie akcji:
zm_analog
:=
OPERATE
(zm_we_wy, rozkaz, argument);
15.5.5. Lista instrukcji
Lista instrukcji IL (Instruction List) jest językiem niskiego poziomu, podobnym do języka asemblera.
Język ten jest efektywny dla małych aplikacji lub służy dla optymalizacji części aplikacji. Instrukcje
odnoszą się zawsze do aktualnego wyniku (rejestru). Operator wskazuje, jakiego typu operacja
będzie wykonywana. Wynik jest ponownie zapisywany do rejestru i traktowany jako aktualny wynik.
Większość operacji standardowego języka IL ma postać:
wynik := wynik OP operand
Program IL jest listą instrukcji, z których każda musi zaczynać się od nowej linii, zawierać
operator z kompletnymi modyfikacjami i ewentualnie jeden lub więcej operandów oddzielonych
separatorem ",". Etykieta zawsze poprzedza znak ":" i może być umieszczona przed instrukcją lub w
wolnej linii. Nazwa nie może przekraczać 16 znaków, pierwszy znak musi być literą, następne literą,
liczbą bądź znakiem "_". Może być definiowana tylko raz w programie. Wykaz operatorów oraz ich
Opublikowano w: WEREWKA J..: Programowanie sprzętu komputerowego dla automatyków. Skrypt AGH Nr 1514 15-17
podstawowe zastosowanie przedstawia tabela 15.3. Rozmieszczenie elementów w programie ma
postać:
ETYKIETA
OPERATOR
OPERAND
KOMENTARZ
Start
LD
zm1
(*wczytanie
zm1*)
AND
zm2
(*koniunkcja
z
zm2*)
ST
wynik
(*wynik
operacji
zapisany
do
wynik*)
W
języku IL nie ma możliwości operowania na zmiennych typu rzeczywistego i zmiennych
będących komunikatem. Maksymalna ilość modyfikatorów służących do grupowania wynosi 32.
Tab. 15.3. Operacje z listy instrukcji.
Operator Opis
LD
ładuje wartość do aktualnego rejestru wynikowego
ST zapamiętuje aktualny wynik z rejestru wynikowego w zmiennej
S wpisuje
wartość TRUE do zmiennej, jeżeli aktualny wynik jest TRUE
R wpisuje
wartość FALSE do zmiennej, jeżeli aktualny wynik jest TRUE
AND
operacja logiczna AND pomiędzy aktualnym wynikiem a operandem
OR
operacja logiczna OR pomiędzy aktualnym wynikiem a operandem
XOR
operacja logiczna XOR pomiędzy aktualnym wynikiem a operandem
ADD
operacja arytmetyczna dodawania pomiędzy aktualnym wynikiem a operandem
SUB
operacja arytmetyczna odejmowania pomiędzy aktualnym wynikiem a operandem
MUL
operacja arytmetyczna mnożenia pomiędzy aktualnym wynikiem a operandem
DIV
operacja arytmetyczna dzielenia pomiędzy aktualnym wynikiem a operandem
GT
operacja porównania >, wynikiem operacji jest TRUE albo FALSE
GE
operacja porównania >=, wynikiem operacji jest TRUE albo FALSE
EQ
operacja przyrównania, wynikiem operacji jest TRUE albo FALSE
LE
operacja porównania <=, wynikiem operacji jest TRUE albo FALSE
LT
operacja porównania <, wynikiem operacji jest TRUE albo FALSE
JMP
operacja skoku do określonej etykiety
RET
operacja powrotu z podprogramu
Literatura
[1] ISaGRAPH Version 2.10, User's Guide, CJ International, 1994
[2] ISaGRAPH Version 2.10, Target user's Guide, CJ International, 1994
[3] Programmable Logic Controllers Survey. Control and Instrumentation. January 1996, pp. 21-23
[4] Skomorowski M.: Wstęp do projektowania systemów cyfrowych. Skrypt Uczelniany UJ, 1994, nr 701,
p. 122
[5] Werewka J., Kich Z. R.: Dobór sterowników analogowo-cyfrowych oraz ich oprogramowania
ze
względu na ich przydatność w wybranych systemach sterowania układów elektromechanicznych.
Opracowanie ZBPE MPH i PAN IE Warszawa, Kraków 1994
[6]
Werewka J., Raczyński A.: Szybkie projektowanie oprogramowania dla sterowników
programowalnych (PLC). Komputerowe wspomaganie inżynierskich prac projektowych. Redakcja. M.
Szymkat i T. Uhl, Cracow Centre for Advanced Training in Information Technology (CCATIE), Kraków
1995, pp. 110-124
Document Outline
Wyszukiwarka
Podobne podstrony:
Sterowniki PLC projekt
Sterowniki PLC
BALANCED SCORECARD PROJEKTU pusty dla studentów
Realizacja układu sterowania logicznego na?zie sterownika PLC sprawozdanie
Sterownik PLC
PROJEKT?UKACJI EKOLOGICZNEJ DLA PRZEDSZKOLA
Projektowanie oprogramowania Wstep do programowania i techniki komputerowej
projekt socjalny dla Pani Ewy K. 92l - OŚ, Projekt socjalny
2 Architektura sterowników PLC materiały wykładowe
sterownik PLC, Automatyka
Labolatorium projektowania układów i systemów sterowania, Narzędzia komputerowego wspomagania projek
praca dyplomowa sterowniki plc(1) AXJZC2BHVTOB2W4Y25CUGW5NAMFE5TU2LJ73JCY
PROJEKT DACHU DLA BUDYNKU RODZINNEGO prezentacja
4 Sterowniki PLC wejściawyjścia analogowe
PL CP1E sterownik PLC Broszura
Podstawy programowania sterowników PLC (2)
Programowanie sterowników PLC u
Projekt geologia 2 dla starszych wersji Worda, Geologia inżynierska
więcej podobnych podstron