Patrycja Grabowska
Weronika Hasslinger
Kinematyka i Dynamika Układów
Mechatronicznych
Laboratorium nr 2
Sprawozdanie
Prowadzący:
dr inż. Jarosław Bednarz
IMIR, Mechatronika,
Projektowanie
Mechatroniczne,
Gr. nr 7
Temat:
Model geometryczny – rozwiązanie
symboliczne
Data zajęć:
12.03.2015r.
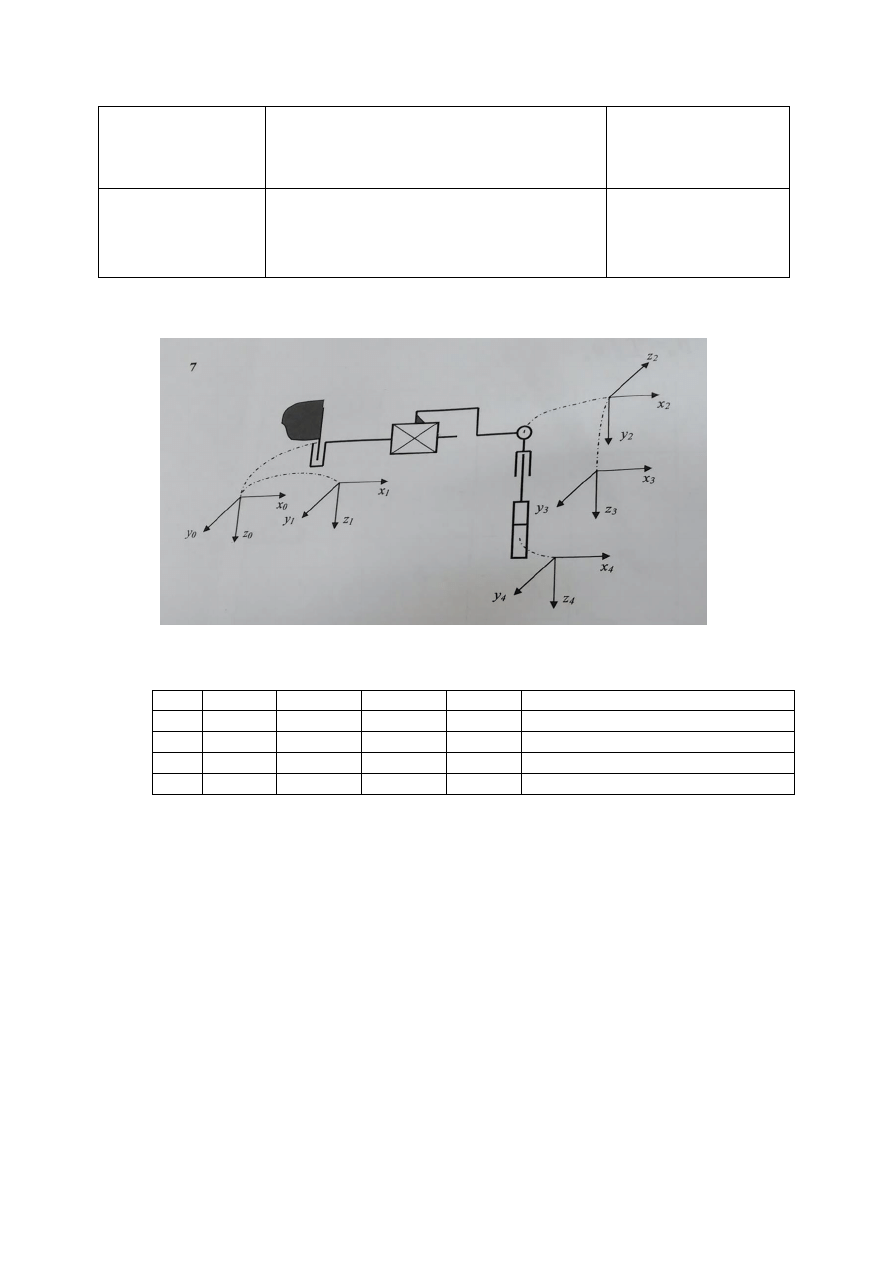
1. Schemat kinematyczny manipulatora
2. Tabela parametrów modelu geometrycznego:
Nr
θ
i
d
i
a
i
α
i
Zakresy wartości zmiennych
1.
θ
1v
0
0
0
± 180 [
O
]
2.
0
0
a
2v
90
O
300 ÷ 600[mm]
3.
θ
3v
0
0
-90
O
± 90 [
O
]
4.
θ
4v
d
4
0
0
± 90 [
O
]
Wartości stałe:
d
4
=0.250 [m]
Przyjęte wartości zmiennych (z uwagi na występowanie we wcześniejszym doborze wartości 90
stopni, zmieniono wartości współrzędnych złącowych):
θ
1v
= 60 [
O
], a
2v
=0.450 [m], θ
3v
=-45 [
O
], θ
4v
=-45 [
O
]
Z1.
Macierz otrzymana w wyniku z poprzednich zajęć:
𝑇
4
0
= [
𝐶1 ∗ 𝐶3 ∗ 𝐶4 − 𝑆1 ∗ 𝑆4 − 𝐶4 ∗ 𝑆1 − 𝐶1 ∗ 𝐶3 ∗ 𝑆4 −𝐶1 ∗ 𝑆3 𝐶1 ∗ (𝑎2 − 𝑆3 ∗ 𝑑4)
𝐶1 ∗ 𝑆4 + 𝐶3 ∗ 𝐶4 ∗ 𝑆1
𝐶1 ∗ 𝐶4 − 𝐶3 ∗ 𝑆1 ∗ 𝑆4
−𝑆1 ∗ 𝑆3 𝑆1 ∗ (𝑎2 − 𝑆3 ∗ 𝑑4)
0. 𝐶4 ∗ 𝑆35
−𝑆3 ∗ 𝑆4
𝐶3
𝐶3 ∗ 𝑑4
0
0
0
1
]
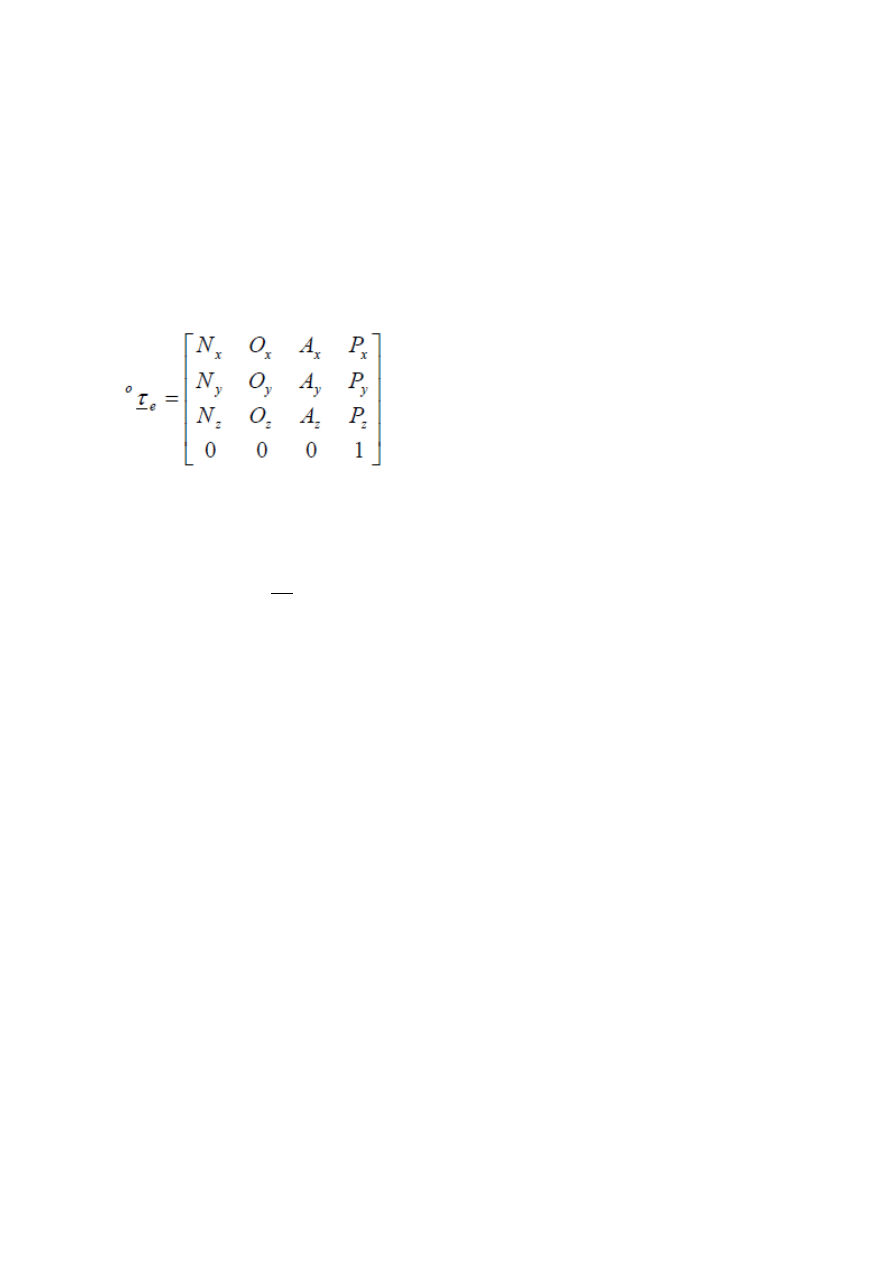
jednocześnie znano położenie i orientacje ostatniego członu w postaci
Algorytm wyznaczania współrzędnych końca trzeciego członu.
Dane: Macierz T04 oraz stałe modelu geometrycznego.
Wyznaczenie wektora Pw
𝑃
𝑊
= [
𝐴𝑥
𝐴𝑦
𝐴𝑧
] ∗ |0| = [
0
0
0
]
Wyznaczenie wektora P
𝑃 = [
𝑃𝑥
𝑃𝑦
𝑃𝑧
]
Wyznaczenie wektora Pa
Pa = P – Pw = Pa
więc
𝑃
𝑎
= [
𝑃𝑎𝑥
𝑃𝑎𝑦
𝑃𝑎𝑧
] = P = [
𝑃𝑥
𝑃𝑦
𝑃𝑧
]
Zależności współrzędnych Pax , Pay , Paz końca 3-o członu od współrzędnych złączowych
otrzymane przy pomocy macierzy T04
Pax = C1*(a2 - S3*d4)
Pay = S1*(a2 - S3*d4)
Pax = C3*d4
Z trzeciego równania:
𝜃
3
= +
−
𝑎𝑟𝑐𝑐𝑜𝑠
𝑃𝑎𝑧
𝑑4
Podnosząc do kwadratu pierwsze i drugie równanie otrzymano:
𝑃𝑎𝑥
2
= 𝑎
2
2
∗ 𝑐𝑜𝑠
2
𝜃
1
− 2𝑎
2
∗ 𝑐𝑜𝑠
2
𝜃
1
∗ 𝑑
4
∗ 𝑠𝑖𝑛𝜃
3
+ 𝑑
4
2
∗ 𝑐𝑜𝑠
2
𝜃
1
∗ 𝑠𝑖𝑛
2
𝜃
3
𝑃𝑎𝑦
2
= 𝑎
2
2
∗ 𝑠𝑖𝑛
2
𝜃
1
− 2𝑎
2
∗ 𝑠𝑖𝑛
2
𝜃
1
∗ 𝑑
4
∗ 𝑠𝑖𝑛𝜃
3
+ 𝑑
4
2
∗ 𝑠𝑖𝑛
2
𝜃
1
∗ 𝑠𝑖𝑛
2
𝜃
3
Dodając oba równani otrzymano:
𝑃𝑎𝑦
2
+ 𝑃𝑎𝑥
2
= 𝑎
2
2
∗ (𝑠𝑖𝑛
2
𝜃
1
+ 𝑐𝑜𝑠
2
𝜃
1
) − 2𝑎
2
∗ (𝑠𝑖𝑛
2
𝜃
1
+ 𝑐𝑜𝑠
2
𝜃
1
) ∗ 𝑑
4
∗ 𝑠𝑖𝑛𝜃
3
+ 𝑑
4
2
∗ (𝑠𝑖𝑛
2
𝜃
1
+ 𝑐𝑜𝑠
2
𝜃
1
) ∗ 𝑠𝑖𝑛
2
𝜃
3
𝑃𝑎𝑦
2
+ 𝑃𝑎𝑥
2
= 𝑎
2
2
− 2𝑎
2
∗ 𝑑
4
∗ 𝑠𝑖𝑛𝜃
3
+ 𝑑
4
2
∗ 𝑠𝑖𝑛
2
𝜃
3
𝑃𝑎𝑦
2
+ 𝑃𝑎𝑥
2
= (𝑎
2
− 𝑑
4
∗ 𝑠𝑖𝑛𝜃
3
)
2
𝑎
2
= 𝑑
4
∗ 𝑠𝑖𝑛𝜃
3
+
−
√𝑃𝑎𝑦
2
+ 𝑃𝑎𝑥
2
Z równań pierwszego i drugiego:
𝜃
1
= arcsin (
𝑃𝑎𝑦
𝑎
2
− 𝑑
4
∗ 𝑠𝑖𝑛𝜃
3
)
𝜃
1
= arccos (
𝑃𝑎𝑥
𝑎
2
− 𝑑
4
∗ 𝑠𝑖𝑛𝜃
3
)
𝜃
1
= 𝑎𝑟𝑐𝑡𝑔
𝑃𝑎𝑦
𝑃𝑎𝑥
+ 𝑁 ∗ 𝜋
N=-1,0,1
Z.2
Opis liczby rozwiązań zadania odwrotnego
Wyznaczone równania
𝜃
3
= +
−
𝑎𝑟𝑐𝑐𝑜𝑠
𝑃𝑎𝑧
𝑑4
tworzy 2 rozwiązania
𝑎
2
= 𝑑
4
∗ 𝑠𝑖𝑛𝜃
3
+
−
√𝑃𝑎𝑦
2
+ 𝑃𝑎𝑥
2
tworzy 2 rozwiązania dla każdego θ3
𝜃
1
= 𝑎𝑟𝑐𝑡𝑔
𝑃𝑎𝑦
𝑃𝑎𝑥
+ 𝑁 ∗ 𝜋
tworzy 2 rozwiązania dla n=1 i n=0
8 rozwiązań
ROZWIĄZANIA
równanie dla θ3
θ31
θ31
θ31
θ31
θ32
θ32
θ32
θ32
równanie dla a2
a21
a21
a22
a22
a23
a23
a24
a24
równanie dla θ1
θ11
θ12
θ11
θ12
θ11
θ12
θ11
θ12
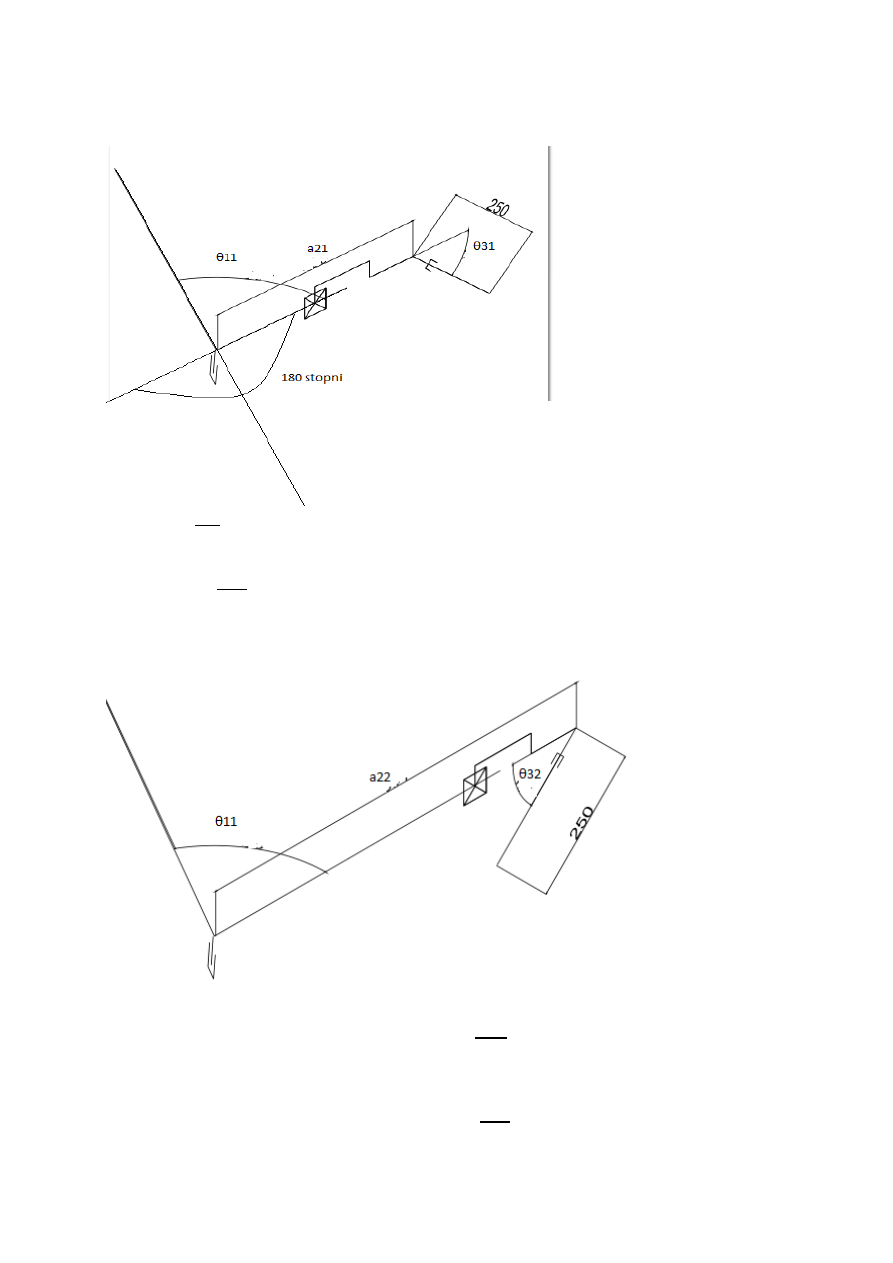
4 rozwiązania prawidłowe
𝜃
1
= 𝑎𝑟𝑐𝑡𝑔
𝑃𝑎𝑦
𝑃𝑎𝑥
a21>0
𝜃
3
= −𝑎𝑟𝑐𝑐𝑜𝑠
𝑃𝑎𝑧
𝑑4
Jedyne rozwiązanie znajdujące się w zakresie ruchu.
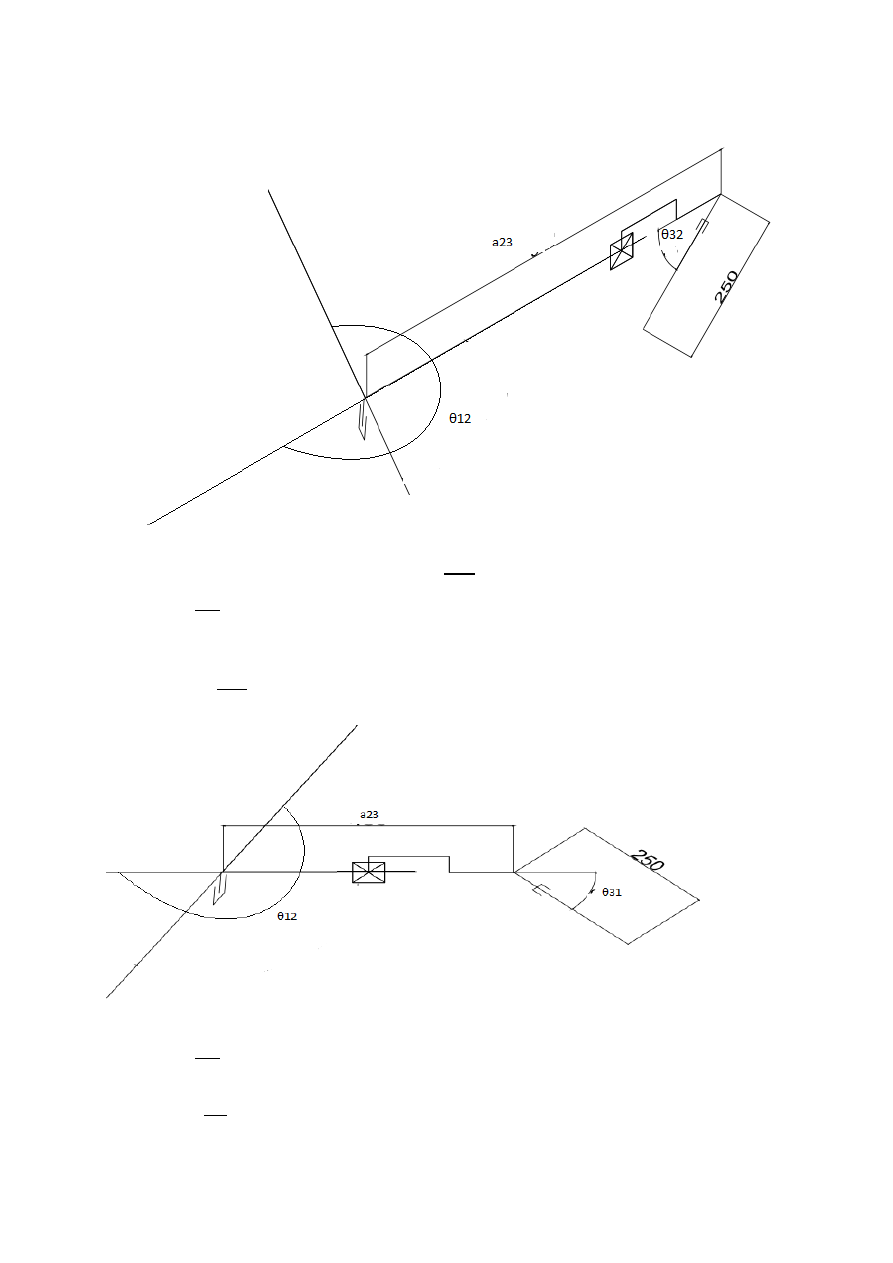
𝜃
1
= 𝑎𝑟𝑐𝑡𝑔
𝑃𝑎𝑦
𝑃𝑎𝑥
a22>0
𝜃
3
= 𝑎𝑟𝑐𝑐𝑜𝑠
𝑃𝑎𝑧
𝑑4
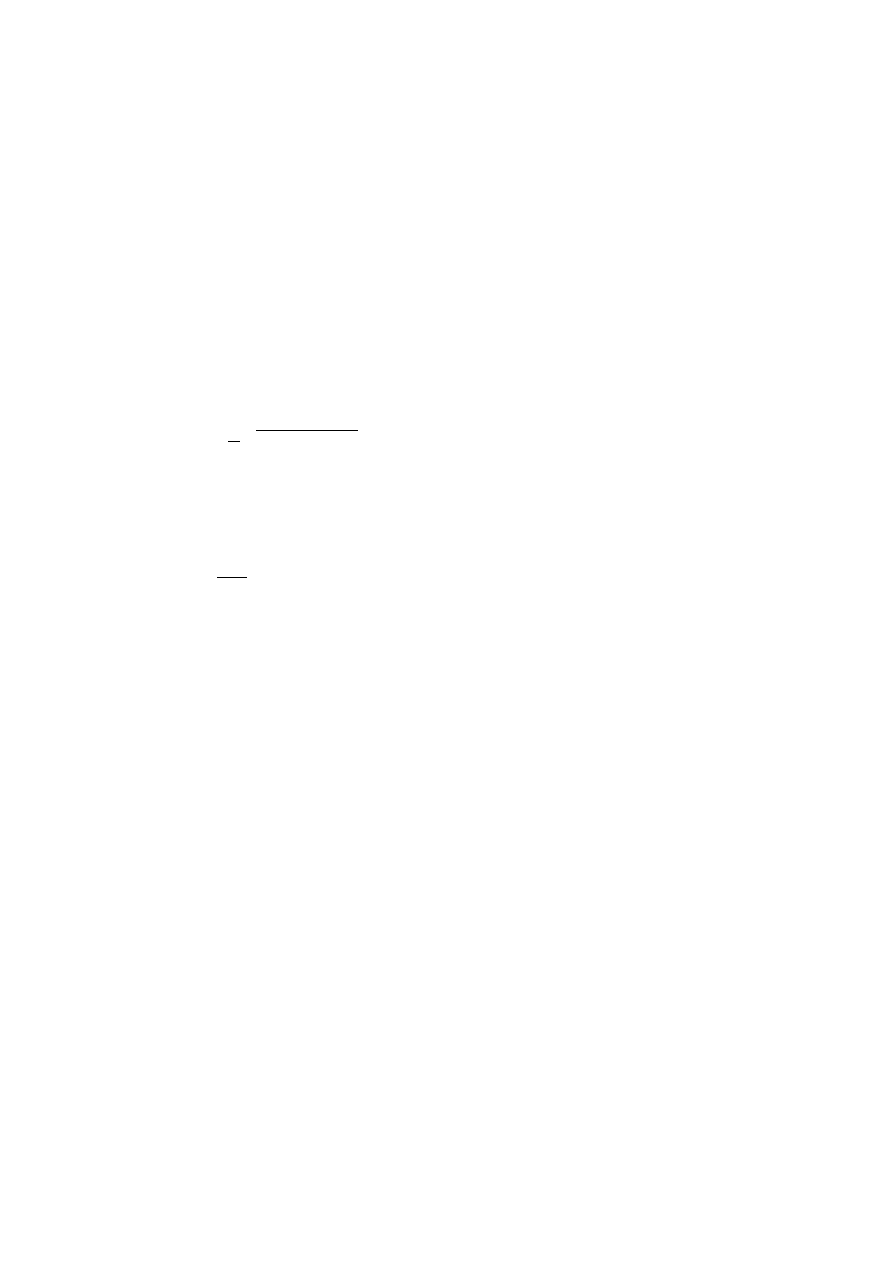
𝜃
1
= 𝑎𝑟𝑐𝑡𝑔
𝑃𝑎𝑦
𝑃𝑎𝑥
+ 𝑁 ∗ 𝜋
𝜃
1
= 𝑎𝑟𝑐𝑡𝑔
𝑃𝑎𝑦
𝑃𝑎𝑥
− 𝜋
a23<0
𝜃
3
= −𝑎𝑟𝑐𝑐𝑜𝑠
𝑃𝑎𝑧
𝑑4
𝜃
1
= 𝑎𝑟𝑐𝑡𝑔
𝑃𝑎𝑦
𝑃𝑎𝑥
− 𝜋
a24<0
𝜃
3
= 𝑎𝑟𝑐𝑐𝑜𝑠
𝑃𝑎𝑧
𝑑4
Z.3
Warunki istnienia rozwiązania
Z3.1
Pax = 0
Pay = 0
Tg(0/0) = Tg (Pay/Pax) Nieskończona liczba rozwiązań ; kąt th1 może być dowolny
Ponieważ w takim przypadku a2=d4 a d4>0,25 [m] więc nie można osiągnąć tego rozwiązania,
znajduje się ono poza zakresem ruchu
Z3.2
𝑎
2
= 𝑑
4
∗ 𝑠𝑖𝑛𝜃
3
+
√𝑃𝑎𝑦
2
+ 𝑃𝑎𝑥
2
Rozwiązanie a2 zawsze istnieje
Z3.3
𝜃
3
= +
−
𝑎𝑟𝑐𝑐𝑜𝑠
𝑃𝑎𝑧
𝑑4
Rozwiązanie th3 zawsze istnieje ponieważ d4>0.
Z.4
Z poprzednich zajęć:
R3e=[
cos(th4) − sin(th4) 0
sin(th4) cos(th4) 0
0 0 1
]
𝑅04 = [
0,8624 −0,3624 03536
0,0795 0,7866 0,6124
−0,5 −0,5 0,7071
]
𝑅03 = [
cos(th1) ∗ cos(th3) − sin(th1) − cos(th1) ∗ sin(th3)
cos(th3) ∗ sin(th1) cos(th1) − sin(th1) ∗ sin(th3)
in(th3) 0 cos(th3)
]
Korzystając z matlaba:
R3e = transpose(R03)*R04
R3e =
0.7071 0.7071 0.0000
-0.7071 0.7071 0.0000
0 -0.0000 1.0000
Otrzymano równania:
cos(𝑡ℎ4) = 0,7071
sin(𝑡ℎ4) = −0,7071
Z powyższych równań:
th4 = - π/4
Z.5
Kod wykonany w matlabie:
syms
th1
a2
th3
%macierz pobrana z poprzednich zajęć
T04 =[ cos(th1)*cos(th3)*cos(th4) - sin(th1)*sin(th4), - cos(th4)*sin(th1)
- cos(th1)*cos(th3)*sin(th4), -cos(th1)*sin(th3), a2*cos(th1) -
d4*cos(th1)*sin(th3);
cos(th1)*sin(th4) + cos(th3)*cos(th4)*sin(th1), cos(th1)*cos(th4) -
cos(th3)*sin(th1)*sin(th4), -sin(th1)*sin(th3), a2*sin(th1) -
d4*sin(th1)*sin(th3);
cos(th4)*sin(th3),
-sin(th3)*sin(th4), cos(th3), d4*cos(th3);
0,
0, 0, 1]
%macierz z wynikami
T04w =[ (2^(1/2)*3^(1/2))/4 + 1/4, 1/4 - (2^(1/2)*3^(1/2))/4,
2^(1/2)/4, 2^(1/2)/16 + 9/40;
3^(1/2)/4 - 2^(1/2)/4, 2^(1/2)/4 + 3^(1/2)/4, (2^(1/2)*3^(1/2))/4,
(2^(1/2)*3^(1/2))/16 + (9*3^(1/2))/40;
-1/2, -1/2, 2^(1/2)/2,
2^(1/2)/8;
0, 0, 0,
1]
%zadeklarowanie użytej stałej
d4=0.25;
%z uwagi na P=[0;0;0], Pa=P
%przypisanie poszczególnym liczbom wartości z macierzy
pax=T04w(1,4)
pay=T04w(2,4)
paz=T04w(3,4)
% obliczanie rozwiązań
rozw=solve(pax==T04(1,4),pay==T04(2,4),paz-T04(3,4),th1,a2,th3)
%Wywołanie otrzymanych wyników
Rth1=rozw.th1
Ra2=rozw.a2
Rth3=rozw.th3
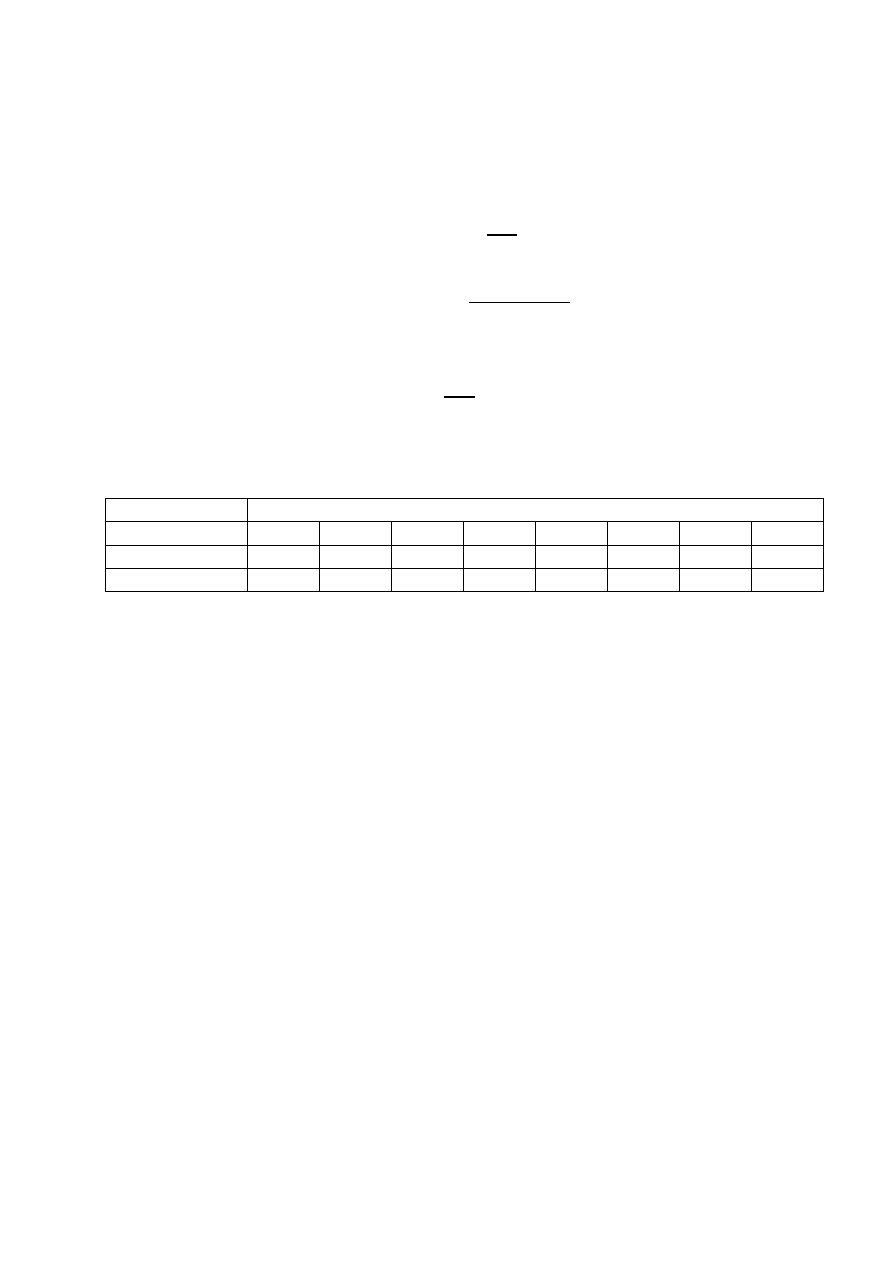
W wyniku otrzymano:
Rozwiązania
th1 (stopnie)
a2 [m]
th3(stopnie)
1
-120
-0,8036
-45
2
60
0,45
-45
3
-120
-0,45
45
3
60
0,8036
45
W celu sprawdzenia obliczeń, do macierzy wyznaczonej na poprzednich zajęciach
podstawiono wynik i porównano go z otrzymanym na poprzednich zajęciach.

Z.6
Rozwiązyjąc numerycznie wykorzystano funkcję „vpasolve”
% obliczanie rozwiązań
ro_numero=vpasolve(pax==T04(1,4),pay==T04(2,4),paz==T04(3,4),t
h1,a2,th3)
%Wywołanie otrzymanych wyników
R_n_th1=ro_numero.th1
R_n_a2=ro_numero.a2
R_n_th3=ro_numero.th3
Otrzymany wynik:
R_n_th1 =1.0471975511965977352760098566071
R_n_a2 =0.45000000000000003913244479732864
R_n_th3 =-0.78539816339744830961566084581988
Wszystkie wartości są praktycznie takie same jak założone I otrzymane we wcześniejszych
rozwiązaniach. Różnice występują, ale są pomijalne. Funkcja służąca do wyznaczania
wyników numerycznie przedstawia tylko jeden wynik, w tym przypadku zgodny z
oczekiwanymi wartościami.
Wyszukiwarka
Podobne podstrony:
Grabowska Hasslinger GR7 n4
Grabowska Hasslinger GR7 n3
Grabowska Hasslinger GR7 n5
pn10 XS3 lab2 Górski Grabowska Hasslinger
Mazowieckie Studia Humanistyczne r2001 t7 n2 s157 160
Mazowieckie Studia Humanistyczne r2002 t8 n2 s109 114
3 3 giro gr7 1401
polska radiostacja polowa n2
Mazowieckie Studia Humanistyczne r1998 t4 n2 s167 170
Mazowieckie Studia Humanistyczne r1996 t2 n2 s203 207
Mazowieckie Studia Humanistyczne r1996 t2 n2 s218 220
Mazowieckie Studia Humanistyczne r1996 t2 n2 s161 170
Mazowieckie Studia Humanistyczne r2002 t8 n2 s183 192
Mazowieckie Studia Humanistyczne r1996 t2 n2 s149 159
FML 2013 t40 n2 spis tresci streszczenia
Mazowieckie Studia Humanistyczne r1996 t2 n2 s55 63
In N2
Mazowieckie Studia Humanistyczne r2002 t8 n2 s193 201
Mazowieckie Studia Humanistyczne r2002 t8 n2 s125 136
więcej podobnych podstron