Patrycja Grabowska
Jakub Górski
Weronika Hasslinger
Systemy Wizyjne
Laboratorium nr 2
Sprawozdanie
Prowadzący:
dr inż. Piotr Kohut
IMIR, gr.23B
Temat:
Kalibracja kamery
Data zajęć:
17.03.2014.
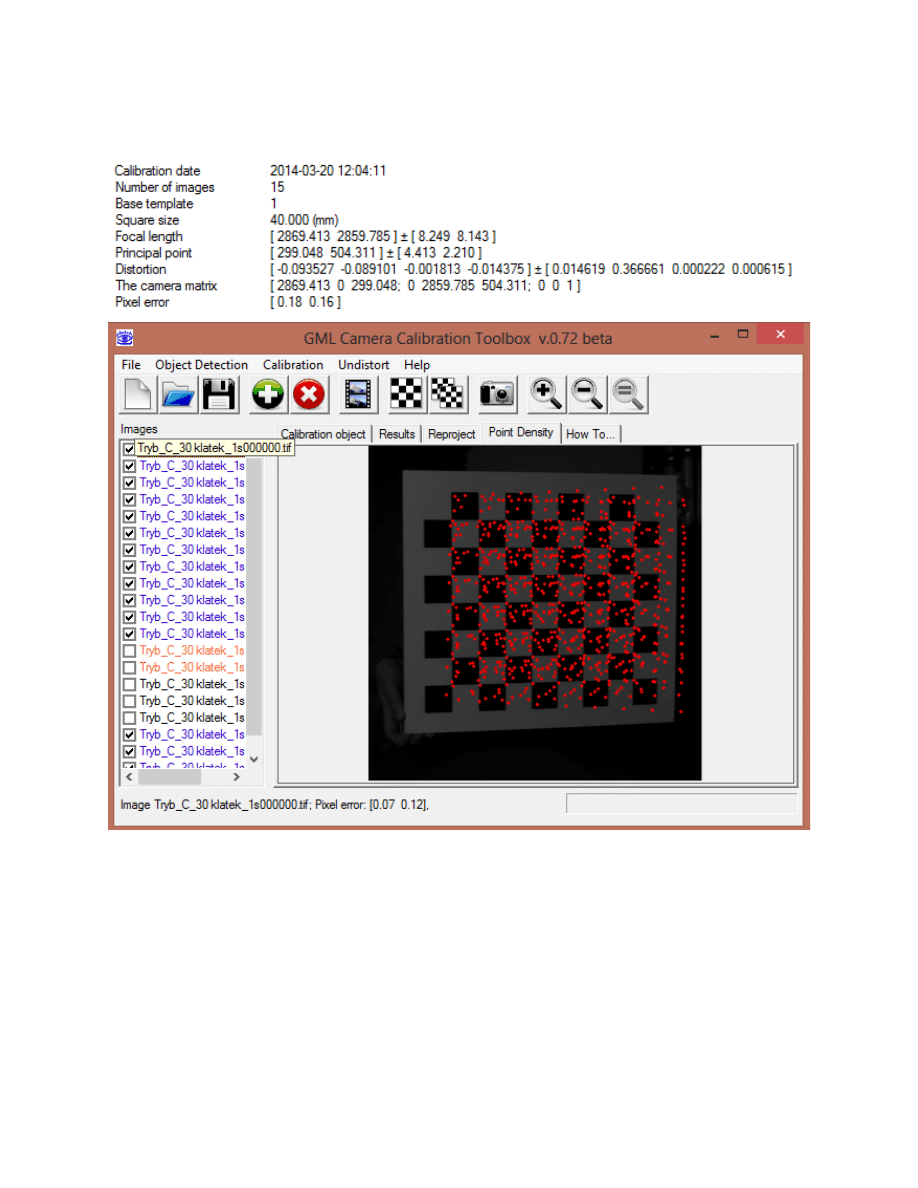
1. Cel zajęć: dokonanie kalibracji kamery XS3 w programie GML Camera Calibration
Toolbox.
2. Przebieg doświdczenia:
Za pomocą kamery XS3 wykonano 4 serie zdjęć (po 20 ujęć każda) przedstawiających
czarno- białą szachownicę o wymiarach 320 x 360 mm (8 x 9 kratek). Dla każdej z serii
zmieniono wartość 1 z parametrów: rozdzielczość lub ogniskową. Następnie dokonano
analizy obrazów za pomocą programu GLM Camera Calibration Toolbox. Otrzymano
takie wartości, jak: ogniskowa, współczynniki kształtu, współrzędne punktu głównego,
współczynniki dystorsji.
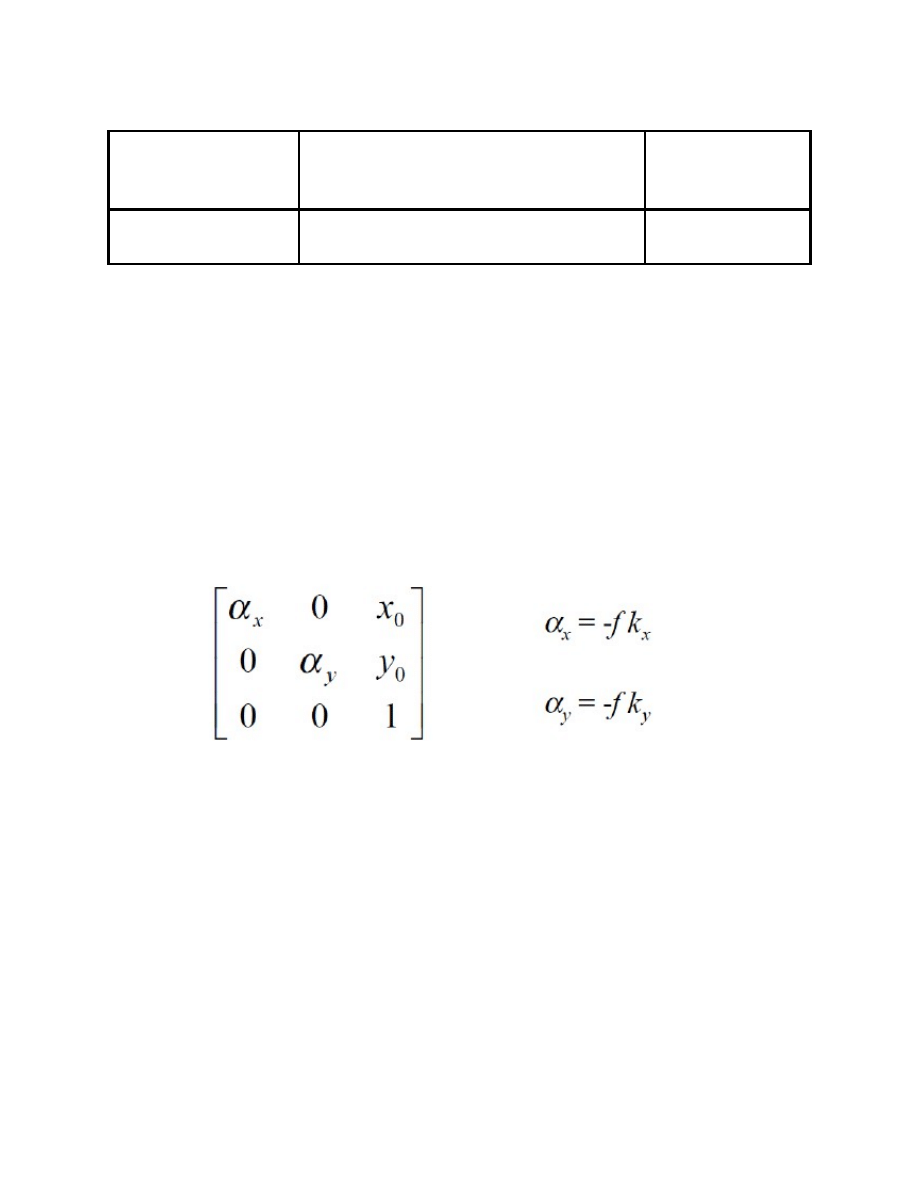
Macierz parametrów wewnętrznych kamery:
α
x
, α
y
- współczynniki kształtu
kx, ky- odwrotności wielkości piksela [1/mm]
f- ogniskowa
xo, yo- współrzędne punktu głównego w pikselach
Macierz dystorsji:
[kc1 kc2 kc3 kc4]
kc1, kc2 –dystorsja promieniowa
kc3, kc4 – dystorsja styczna
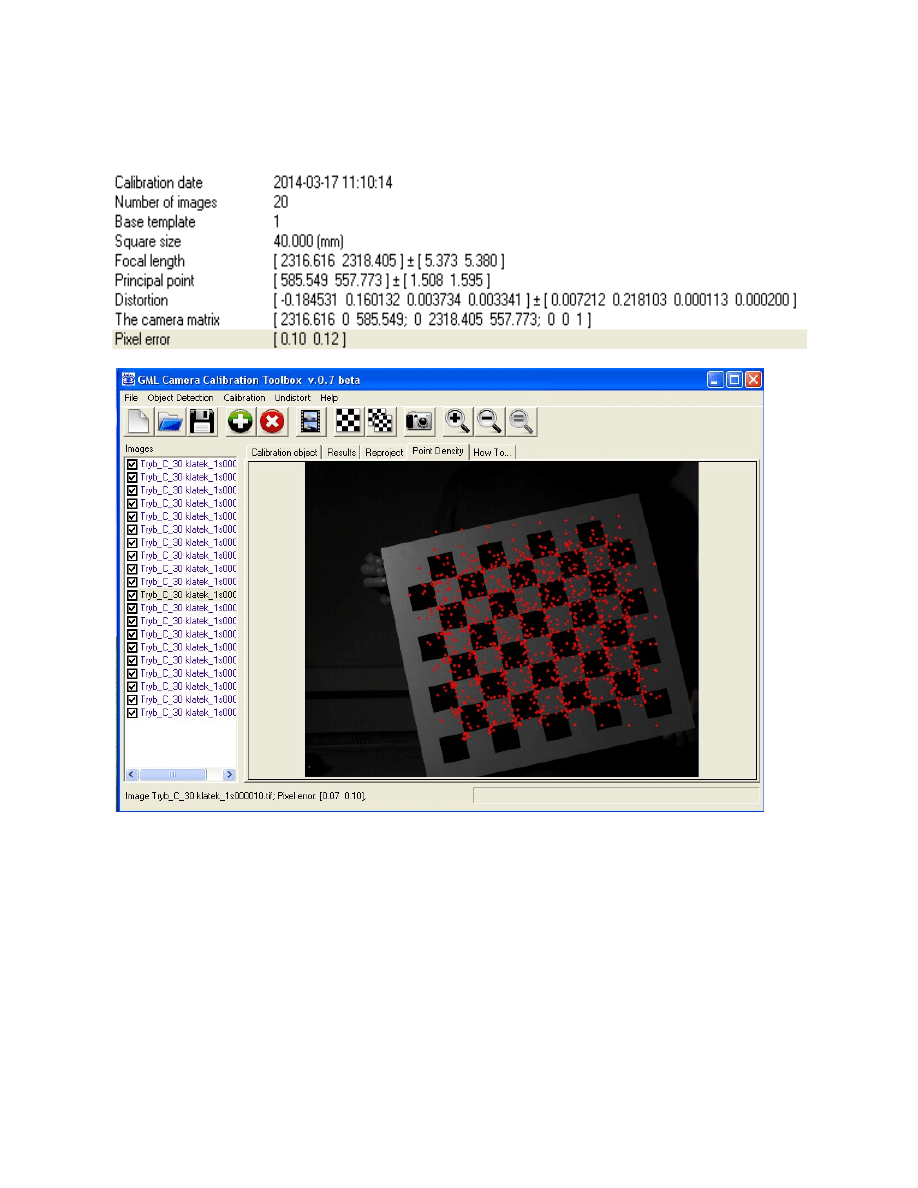
3. Wyniki dla następujących ustawień:
a. rozdzielczość: 1280 x 1024; ogniskowa: 28 mm;
Wartości teoretyczne:
f= 28mm/0.012mm = 2333,33 pxl
Punkt główny:
x=1280 pxl /2 =640 pxl
y=1024 pxl /2 = 512 pxl
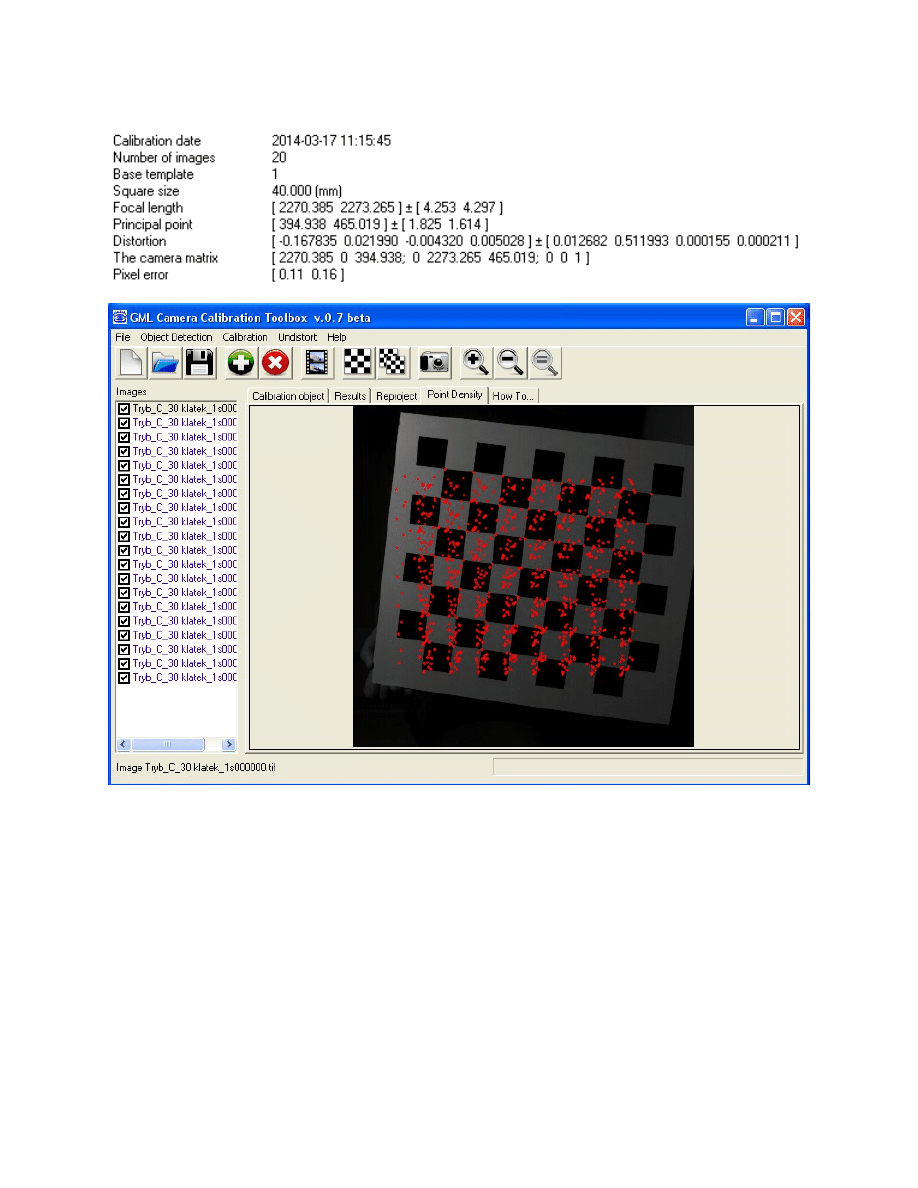
b. rozdzielczość: 1016 x 1016; ogniskowa: 28 mm;
Wartości teoretyczne:
f= 28mm/0.012mm = 2333,33 pxl
Punkt główny:
x=y= 1016 pxl /2 = 508 pxl
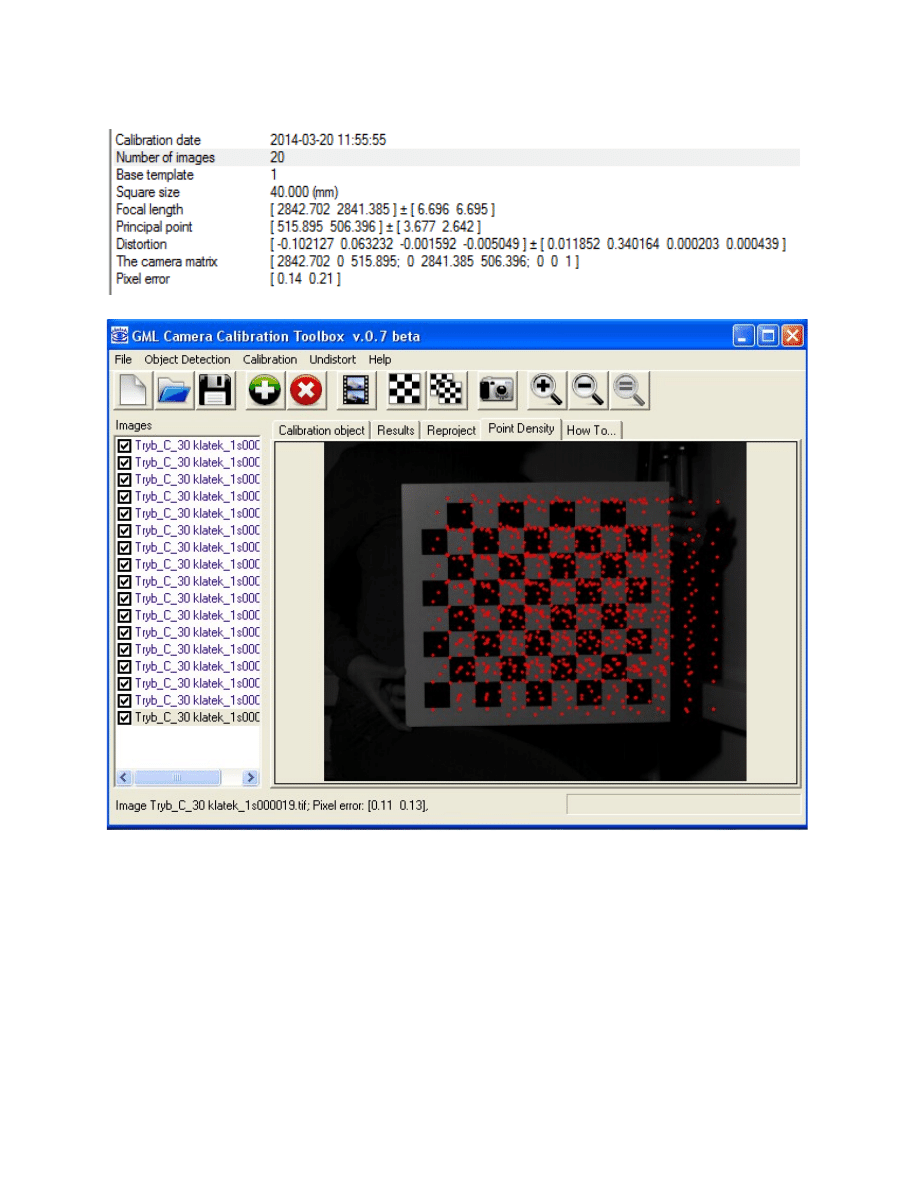
c. rozdzielczość: 1280 x 1024; ogniskowa: 35 mm;
Wartości teoretyczne:
f= 35 mm/ 0,012 mm =2916,67 pxl
Punkt główny:
x=1280 pxl /2 =640 pxl
y=1024 pxl /2 = 512 pxl
d. rozdzielczość: 1016 x 1016; ogniskowa: 35 mm;
Wartości teoretyczne:
f= 35 mm/ 0,012 mm =2916,67 pxl
Punkt główny:
x=y= 1016 pxl /2 = 508 pxl

4. Wnioski:
Porównując wartości otrzymane z pomiarów z wartościami obliczonymi na podstawie
parametrów kamery wyciągnięto następujące wnioski:
a. wskutek kalibracji kamery można otrzymać parametry wewnętrzne kamery, to
jest: ogniskowa, współczynniki dystorsji promieniowej i stycznej oraz
współrzędne punktu głównego przetwornika CCD; zawarte w macierzy kamery,
b. podczas pomiarów pojawiły się pewne błędy spowodowane czynnikiem ludzkim,
co jest widoczne poprzez mały rozrzut punktów oraz duże różnice między
wartościami współrzędnych punktu głównego podanymi przez program
a wartościami teoretycznymi,
c. otrzymana wartość ogniskowej kamery pokrywa się z wartością rzeczywistą,
co wskazuje na fakt, że program uwzględnia różnice pomiędzy modelem kamery
otworkowej oraz rzeczywistą kamerą soczewkową,
d. zgodnie z wartościami otrzymanymi w doświadczeniu,im większa rozdzielczość
tym mniejsze są różnice między wartościami obliczonymi a wartościami
podanymi przez program,
e. zgodnie z wartościami otrzymanymi w doświadczeniu,im większa ogniskowa tym
mniejsze są różnice między wartościami obliczonymi a wartościami podanymi
przez program.
Wyszukiwarka
Podobne podstrony:
pn10 Matlab lab2 Bubak
Grabowska Hasslinger GR7 n2
Grabowska Hasslinger GR7 n4
Grabowska Hasslinger GR7 n3
Grabowska Hasslinger GR7 n5
Grabowska Lab2
I9M1S1 Nawrot Gudanowicz lab2
IWP JP2 Lab2 Struktury
Lab2 OZE id 259328 Nieznany
lrm sprawozdanie kck lab2
LAB 4 Lab2 WprowadzenieMATLAB 2 Nieznany
lab2(v2), Semestr III, Technologie wytwarzania
termo lab2 szczotka
Grudziński Krawiec lab2# 10 2012
Badanie wyplywu cieczy ze zbior sprawozdanie z lab2 id 631079 (2)
lab2 3 3
MES lab2
program lab2 1JP3
lab2 7 id 259265 Nieznany
więcej podobnych podstron