Patrycja Grabowska
Kinematyka i Dynamika Układów
Mechatronicznych cz. II
Laboratorium nr 2
Sprawozdanie
Prowadzący:
dr hab. inż. Tomasz
Buratowski
IMIR, Mechatronika,
Projektowanie
Mechatroniczne
Temat: Kinematyka odwrotna
Data zajęć:
30.04.2015r.
1. Przyjęte dane:
Prędkość punktu A v
A
=0.3 [m/s],
Rozruch 2 [s],
Ruch po prostej 4 [s],
Ruch po łuku 10 [s] z R=2 [m],
Kąt obrotu obudowy 0
- 137,51
,
Ruch po prostej 2 [s],
Zatrzymanie 2 [s].
l1 [m]
l3 [m]
l4 [m]
l5 [m]
r1 [m]
r2 [m]
r3 [m]
0.163
0.07
0.2
0.07
0.0825
0.0825
0.035
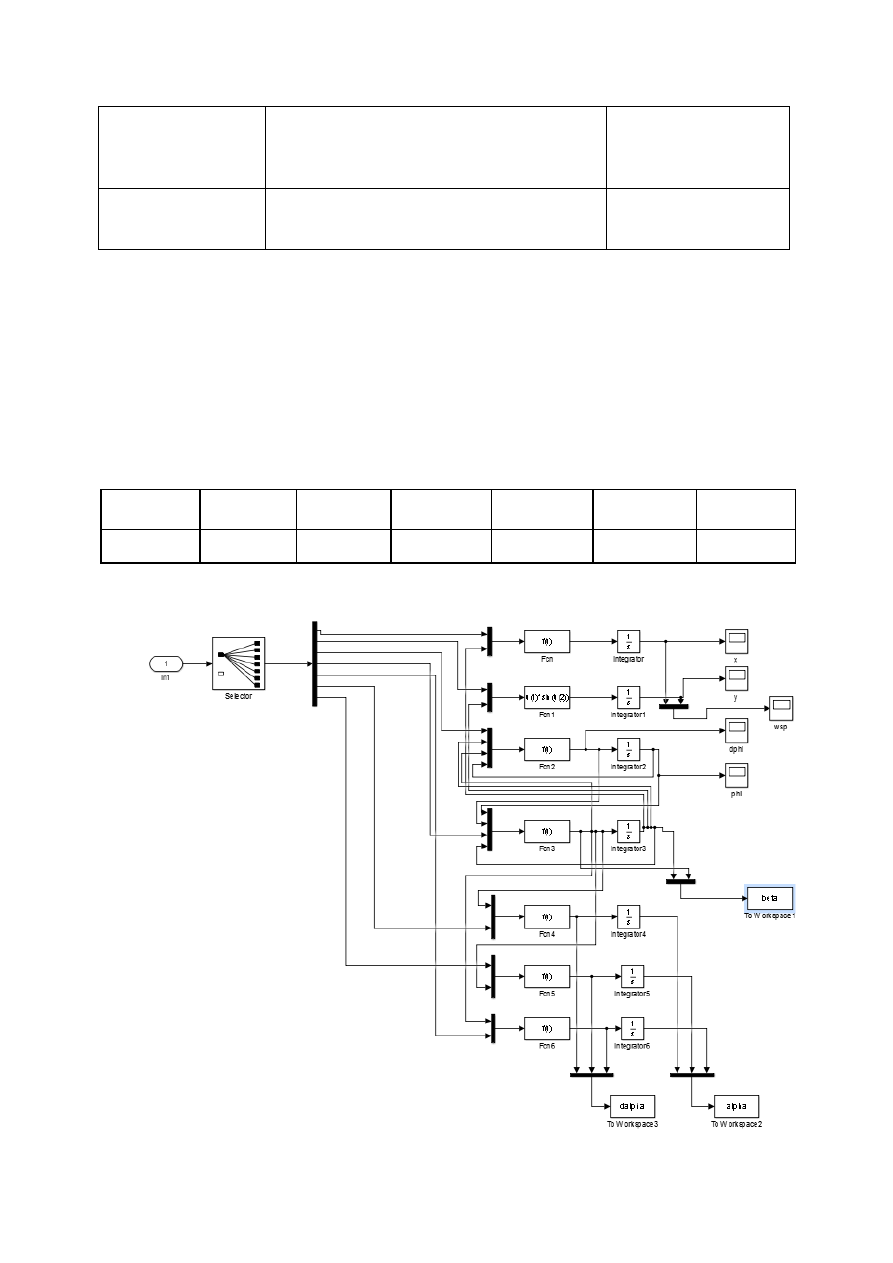
2. Schemat :
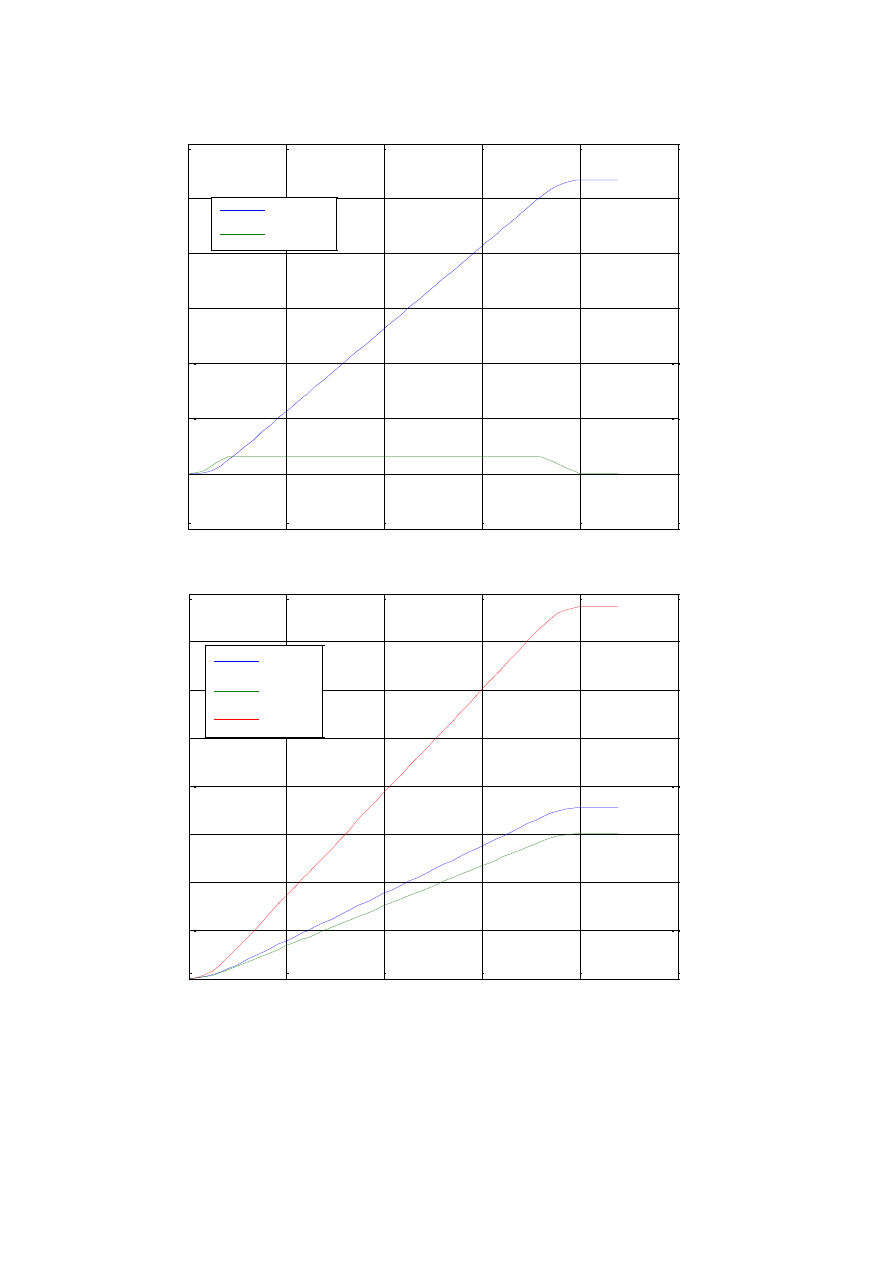
3. Otrzymane wykresy:
0
5
10
15
20
25
-0.5
0
0.5
1
1.5
2
2.5
3
Czas [t]
[rad]
*
[rad/s]
0
5
10
15
20
25
0
20
40
60
80
100
120
140
160
Czas [t]
1
[rad]
2
[rad]
3
[rad]
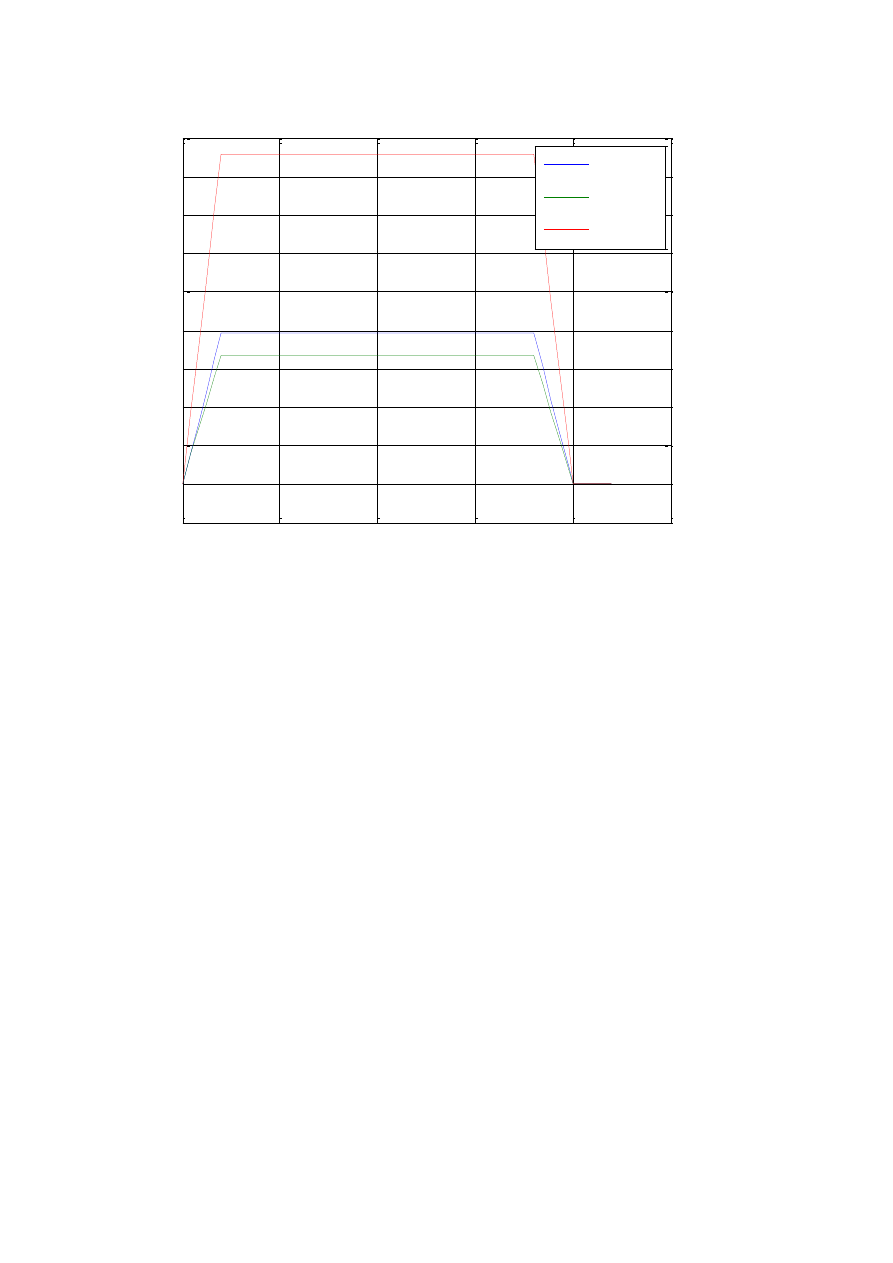
0
5
10
15
20
25
-1
0
1
2
3
4
5
6
7
8
9
Czas [t]
(
1
)
*
[rad]
(
2
)
*
[rad]
(
3
)
*
[rad]
Wyszukiwarka
Podobne podstrony:
pn10 XS3 lab2 Górski Grabowska Hasslinger
I9M1S1 Nawrot Gudanowicz lab2
IWP JP2 Lab2 Struktury
Lab2 OZE id 259328 Nieznany
lrm sprawozdanie kck lab2
LAB 4 Lab2 WprowadzenieMATLAB 2 Nieznany
lab2(v2), Semestr III, Technologie wytwarzania
termo lab2 szczotka
Grudziński Krawiec lab2# 10 2012
Badanie wyplywu cieczy ze zbior sprawozdanie z lab2 id 631079 (2)
lab2 3 3
MES lab2
program lab2 1JP3
lab2 7 id 259265 Nieznany
Instrukcja IEF Algorytmy i struktury danych lab2
lab2 (2)
lab2 pd
lab2
więcej podobnych podstron