Patrycja Grabowska
Weronika Hasslinger
Kinematyka i Dynamika Układów
Mechatronicznych
Laboratorium nr 5
Sprawozdanie
Prowadzący:
dr inż. Jarosław Bednarz
IMIR, Mechatronika,
Projektowanie
Mechatroniczne,
Gr. nr 7
Temat: Dynamika – formułowanie
dynamicznych równań ruchu
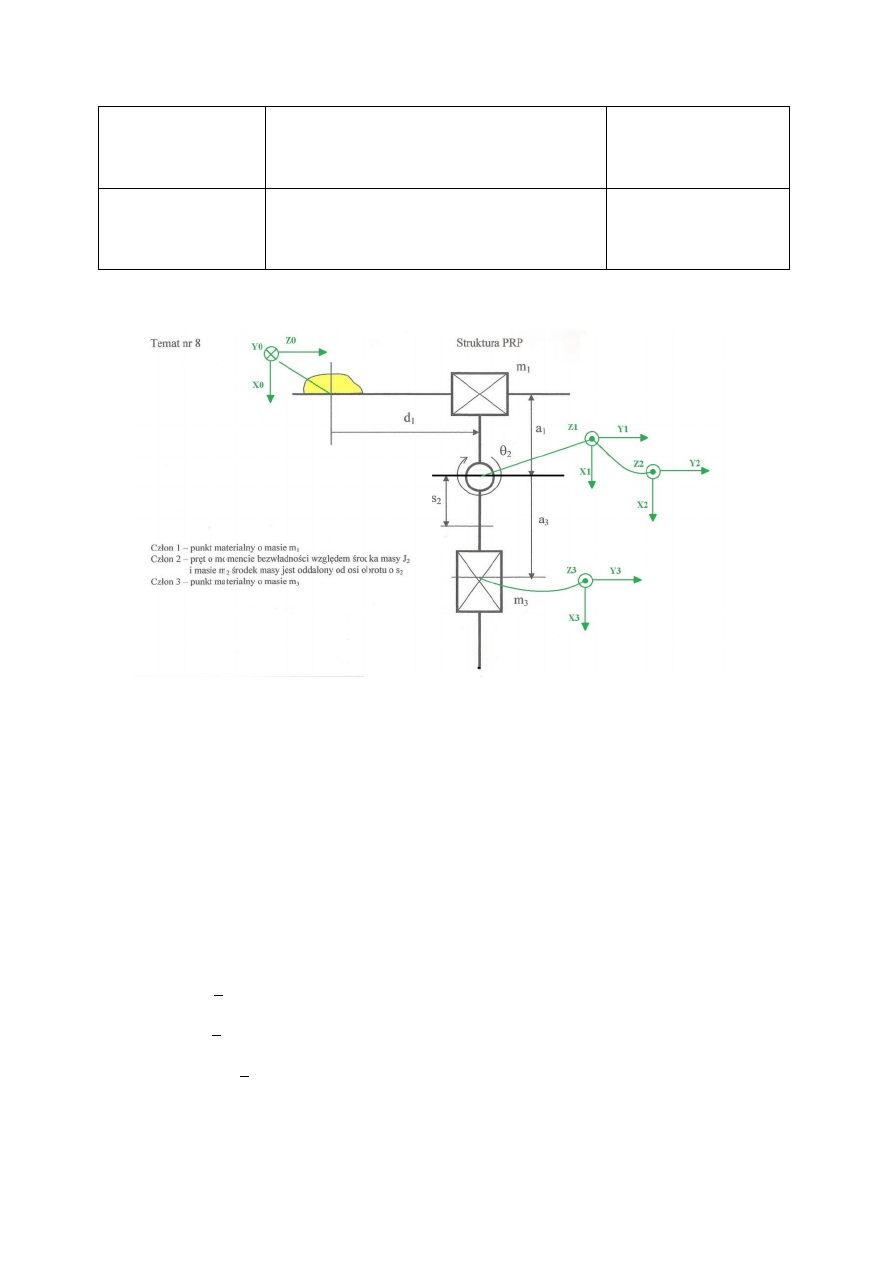
Temat nr 8
Data zajęć:
9.04.2015r.
1. Model
2. Określenie przestrzennego rozkładu masy
Energia potencjalna jest obliczana względem płaszczyzny Y
0
Z
0
.
2.1. Dla członu 1.:
J
1yy
= 𝑚
1
∗ 𝑎
1
2
J
1zz
= 𝑚
1
∗ 𝑎
1
2
𝑚
1
∗ 𝑥
1
= −𝑚
1
∗ 𝑎
1
J
1
=
[
𝑚
1
∗ 𝑎
1
2
0
0
−𝑚
1
∗ 𝑎
1
0
𝑚
1
∗ 𝑎
1
2
0
0
0
0
𝑚
1
∗ 𝑎
1
2
0
−𝑚
1
∗ 𝑎
1
0
0
𝑚
1
]
2.2. Dla członu 2.:
J
2yy
=
4
3
𝑚
2
∗ 𝑠
2
2
J
2zz
=
4
3
𝑚
2
∗ 𝑠
2
2
𝑚
2
∗ 𝑥
2
=
1
2
𝑚
2
∗ 𝑠
2
J
2
=
[
4
3
𝑚
2
∗ 𝑠
2
2
0
0
1
2
𝑚
2
∗ 𝑠
2
0
4
3
𝑚
2
∗ 𝑠
2
2
0
0
0
0
4
3
𝑚
2
∗ 𝑠
2
2
0
1
2
𝑚
2
∗ 𝑠
2
0
0
𝑚
2
]
2.3. Dla członu 3.:
J
2
= [
0 0 0
0
0 0 0
0
0 0 0
0
0 0 0
𝑚
3
]
3. Określenie energii kinetycznej i potencjalnej członów mechanizmu
3.1. Człon 1- ruch postępowy:
𝑣
1
= 𝑑
1
̇
𝐸
𝐾1
=
1
2
𝑚
1
𝑑
1
̇
2
𝐸
𝑃1
= 0
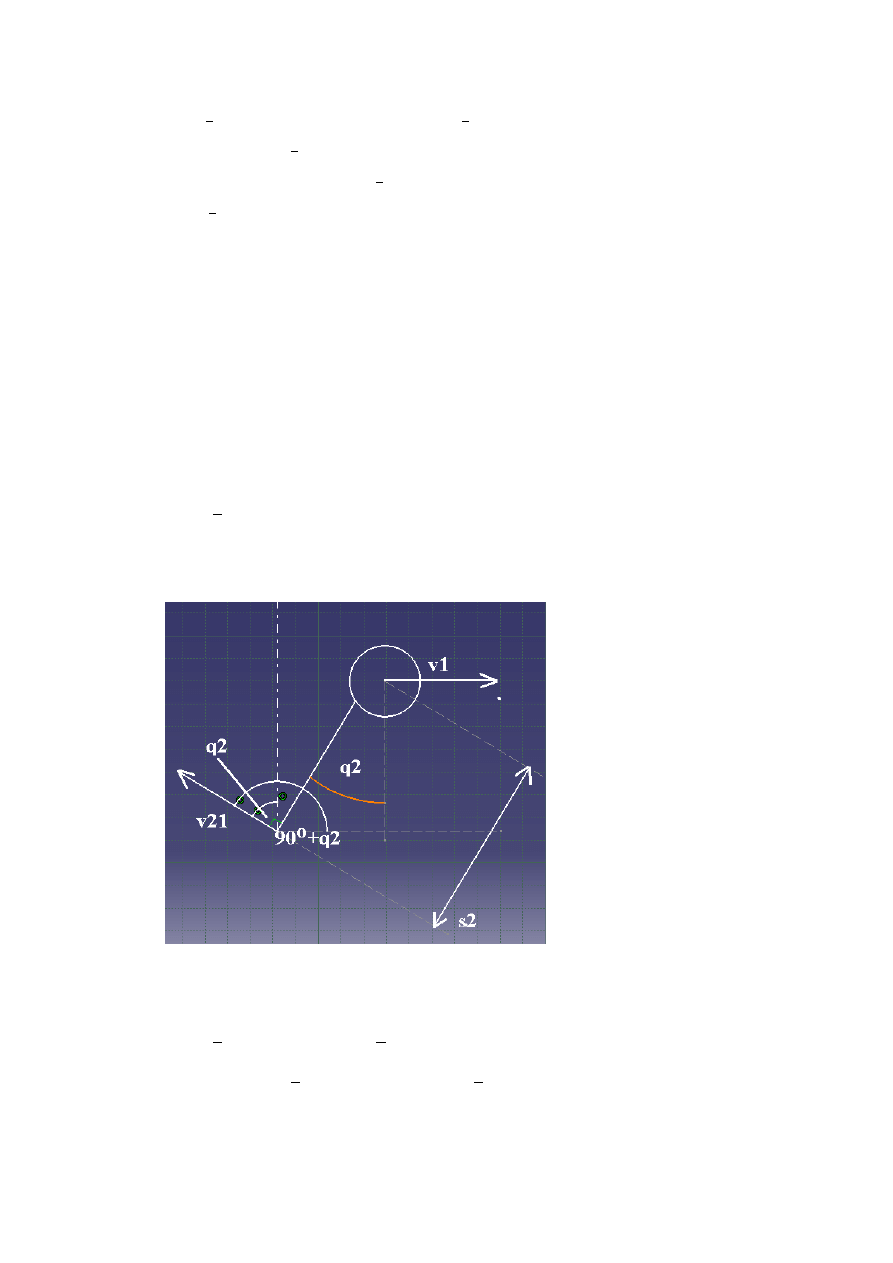
3.2. Człon 2- ruch płaski:
𝑣
2
̅̅̅ = 𝑣
1
̅̅̅ + 𝑣
21
̅̅̅̅
𝑣
21
= 𝜃
2
̇ ∗ 𝑠
2
𝑣
2
2
= 𝑣
1
2
+ 𝑣
21
2
− 2 ∗ 𝑣
1
∗ 𝑣
21
∗ cos
2
𝜃
2
= 𝑑
1
̇
2
+ 𝜃
2
̇
2
∗ 𝑠
2
2
− 2 ∗ 𝑑
1
̇ ∗ 𝜃
2
̇ ∗ 𝑠
2
∗ cos 𝜃
2
𝐸
𝐾2
=
1
2
(𝐼
2
+ 𝑚
2
∗ 𝑠
2
2
) ∗ 𝜃
2
2
̇ +
1
2
∗ 𝑚
2
∗ (𝑑
1
̇
2
+ 𝜃
2
̇
2
∗ 𝑠
2
2
− 2 ∗ 𝑑
1
̇ ∗ 𝜃
2
̇ ∗ 𝑠
2
∗ cos 𝜃
2
)
=
1
2
𝐼
2
∗ 𝜃
2
2
̇ + 𝑚
2
∗ 𝑠
2
2
∗ 𝜃
2
2
̇ +
1
2
∗ 𝑚
2
∗ 𝑑
1
̇
2
− 𝑚
2
∗ 𝑑
1
̇ ∗ 𝜃
2
̇ ∗ 𝑠
2
∗ cos 𝜃
2
𝐸
𝑃2
= −𝑚
2
∗ 𝑔 ∗ 𝑎
1
− 𝑚
2
∗ 𝑔 ∗ 𝑠
2
∗ cos 𝜃
2
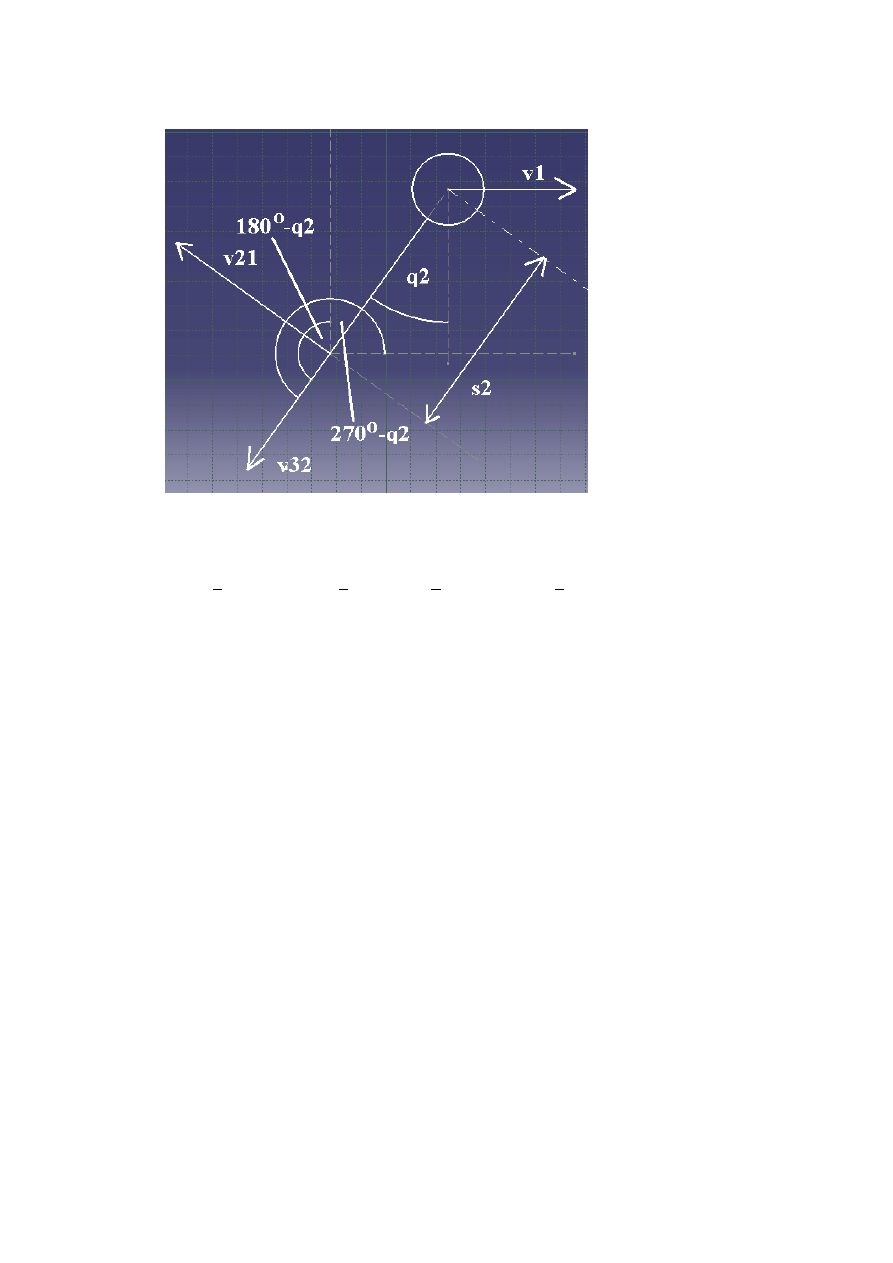
3.3. Człon 3- ruch płaski:
𝑣
3
̅̅̅ = 𝑣
2
̅̅̅ + 𝑣
32
̅̅̅̅
𝑣
32
= 𝑎
3
̇
𝑣
3
2
= 𝑑
1
̇
2
+ 𝜃
2
̇
2
∗ 𝑠
2
2
+ 𝑎
3
2
̇ − 2 ∗ 𝑑
1
̇ ∗ 𝜃
2
̇ ∗ 𝑠
2
∗ cos 𝜃
2
+ 2 ∗ 𝑑
1
̇ ∗ 𝑎
3
̇ ∗ sin 𝜃
2
𝐸
𝐾3
=
1
2
𝑚
3
∗ 𝑎
3
2
∗ 𝜃
2
2
̇ +
1
2
𝑚
3
∗ 𝑑
1
̇
2
+
1
2
𝑚
3
∗ 𝜃
2
̇
2
∗ 𝑠
2
2
+
1
2
𝑚
3
∗ 𝑎
3
2
̇ − 𝑚
3
∗ 𝑑
1
̇ ∗ 𝜃
2
̇ ∗ 𝑠
2
∗ cos 𝜃
2
+ 𝑚
3
∗ 𝑑
1
̇ ∗ 𝑎
3
̇ ∗ sin 𝜃
2
𝐸
𝑃3
= −𝑚
3
∗ 𝑔 ∗ 𝑎
1
−𝑚
3
∗ 𝑔 ∗ 𝑎
3
∗ cos 𝜃
2
4.
Skrypt utworzony w Matlabie:
% formulowanie rownan dynamicznych ruchu
% dla struktury kinematycznej PRP
clear
all
clc
syms
Ek1
Ek2
Ek3
Ek
m1
a1
J2
m2
s2
m3
q1
q2
q3
dq1
dq2
dq3
real
syms
Ep1
Ep2
Ep3
g
real
syms
L
t
ddq1
ddq2
ddq3
S1
S2
S3
S4
real
%człon 1
Ek1=1/2*m1*((dq1)^2+(0)^2)
Ep1=0
% człon 2
Ek2=1/2*(J2+ m2*s2^2)*dq2^2 + 1/2*m2*((dq1+
dq2*s2*cos(sym(pi)-q2))^2+(dq2*s2*cos(sym(pi/2)-q2))^2)
Ep2=-m2*g*(a1+s2*cos(q2))

%człon 3
Ek3=1/2*(m3*q3^2)*dq2^2 + 1/2*m3*((dq1+ dq2*s2*cos(sym(pi)-
q2)+dq3*cos(sym(3/2*pi)-q2))^2+(dq2*s2*cos(sym(pi/2)-
q2)+dq3*cos(sym(pi)-q2))^2)
Ep3=-m3*g*(a1+q3*cos(q2))
%energia kinetyczna
Ek=simplify(Ek1+Ek2+Ek3)
% energia potencjalna
Ep=simplify(Ep1+Ep2+Ep3)
% potencjal kinetyczny L
L=Ek-Ep;
% rownania Lagrange’a drugiego rodzaju
% pochodna L wzgledem dqi i=1,2,3
f11=diff(L,
'dq1'
);
f21=diff(L,
'dq2'
);
f31=diff(L,
'dq3'
);
% wprowadzenie zmiennej czasowej t
S1={
'q1'
,
'q2'
,
'q3'
,
'dq1'
,
'dq2'
,
'dq3'
};
S2={
'q1(t)'
,
'q2(t)'
,
'q3(t)'
,
'dq1(t)'
,
'dq2(t)'
,
'dq3(t)'
};
f12=subs(f11,S1,S2);
f22=subs(f21,S1,S2);
f32=subs(f31,S1,S2);
% pochodna fi2 wzgledem t - czasu i=1,2,3
f13=diff(f12,
't'
);
f23=diff(f22,
't'
);
f33=diff(f32,
't'
);
% ujednolicenie oznaczen i usuniecie zmiennej t
S3={
'diff(q1(t),t)'
,
'diff(q2(t),t)'
,
'diff(q3(t),t)'
,
'diff(dq
1(t),t)'
,
'diff(dq2(t),t)'
,
'diff(dq3(t),t)'
};
S4={
'dq1'
,
'dq2'
,
'dq3'
,
'ddq1'
,
'ddq2'
,
'ddq3'
};
f14=subs(f13,S3,S4);
f24=subs(f23,S3,S4);
f34=subs(f33,S3,S4);
S5={
'dq1(t)'
,
'dq2(t)'
,
'dq3(t)'
};
S6={
'dq1'
,
'dq2'
,
'dq3'
};
f15=subs(f14,S5,S6);
f25=subs(f24,S5,S6);
f35=subs(f34,S5,S6);
S7={
'q1(t)'
,
'q2(t)'
,
'q3(t)'
};
S8={
'q1'
,
'q2'
,
'q3'
};
r11=subs(f15,S7,S8);
r21=subs(f25,S7,S8);
r31=subs(f35,S7,S8);

% pochodna L wzgledem qi i=1,2,3
r12=diff(L,
'q1'
);
r22=diff(L,
'q2'
);
r32=diff(L,
'q3'
);
% zestawienie prawej stony rownan dynamicznych ruchu
r1=simplify(r11-r12)
r2=simplify(r21-r22)
r3=simplify(r31-r32)
5. Wyprowadzone równania dynamiczne ruchu w postaci macierzowej oraz charakterystyka
postaci i składników tych równań:
[
𝑓
1
𝜏
2
𝑓
3
] = [
𝑚
1
+ 𝑚
2
+ 𝑚
3
−( 𝑚
2
+ 𝑚
3
) ∗ 𝑠
2
∗ 𝑐𝑜𝑠(𝜃
2
)
−𝑚
3
∗ 𝑠𝑖𝑛(𝜃
2
)
−( 𝑚
2
+ 𝑚
3
) ∗ 𝑠
2
∗ 𝑐𝑜𝑠(𝜃
2
) 𝐽
2
+ 𝑚
3
∗ 𝑎
3
2
+ (2 ∗ 𝑚
2
+ 𝑚
3
) ∗ 𝑠
2
2
0
−𝑚
3
∗ sin(𝜃
2
)
0
𝑚
3
]
∗ [
𝑑
1
̈
𝜃
2
̈
𝑎
3
̈
] + [
−𝜃
2
̇ ∗ 𝑎
3
̇ ∗ 𝑚
3
∗ 𝑐𝑜𝑠(𝜃
2
) + 𝜃
2
̇
2
∗ ( 𝑚
2
+ 𝑚
3
) ∗ 𝑠
2
∗ 𝑠𝑖𝑛(𝜃
2
)
(2 ∗ 𝜃
2
̇ ∗ 𝑎
3
+ 𝑑
1
̇ ∗ 𝑐𝑜𝑠(𝜃
2
)) ∗ 𝑎
3
̇ ∗ 𝑚
3
−𝑚
3
∗ 𝜃
2
̇ (𝑎
3
∗ 𝜃
2
̇ + 𝑑
1
̇ ∗ cos (𝜃
2
))
]
+ [
0
(𝑚
3
∗ 𝑎
3
+ 𝑚
2
∗ 𝑠
2
) ∗ 𝑠𝑖𝑛(𝜃
2
)
−𝑚
3
∗ cos(𝜃
2
)
] ∗ 𝑔
gdzie:
𝑚
1
, 𝑚
2
, 𝑚
3
- masy członów 1, 2 i 3
𝑠
2
- odległość środka ciężkości członu 2 od osi obrotu w przegubie [m]
a
3
- odległość członu 3 od osi obrotu [m]
J
2
– moment bezwładności członu 2
θ
2
- przemieszczenie kątowe w członie 2
𝑑
1
̇ -prędkość liniowa członu 1względem bazowego układu współrzędnych
𝜃
2
̇ − prędkość kątowa członu względem lokalnego układu współrzędnych
𝑓
1
–siła przyłożona do członu nr 1 [N]
𝜏
2
- moment siły przyłożony do członu nr 2 [Nm]
𝑓
3
–siła przyłożona do członu nr 3 [N]
6. Wnioski:
6.1. Metoda Lagrange’a pozwala w szybki sposób wyznaczyć zewnętrzne siły i momenty sił
oddziaływujących na poszczególne człony.
6.2. Przedstawienie równań dynamiki w postaci macierzowej pozwala zaobserwować, jaki wpływ
ma prędkość i przyspieszenie oraz położenie danego członu na ruch pozostałych elementów
mechanizmu .
6.3. Energia potencjalna jest wielkością względną, zależy od przyjętego poziomu zerowego.
Wyszukiwarka
Podobne podstrony:
Grabowska Hasslinger GR7 n2
Grabowska Hasslinger GR7 n4
Grabowska Hasslinger GR7 n3
pn10 XS3 lab2 Górski Grabowska Hasslinger
3 3 giro gr7 1401
historia choroby N5
Sebasian Grabowiecki, Do czytania, BAROK
IVTE GR7 CW6 Pomiar natężenia oświetlenia
IVTE GR7 CW4?danie zabezpieczeń zwarciowych i przeciążeniowych
pan wołodyjowski, 5, Nazajutrz, zaopatrzywszy si˙ w listy ksi˙dza prymasa i u˙o˙ywszy ca˙y plan z Ha
Typologia, GRĄDY WYSOKIE
Typologia, GRĄDY WYSOKIE
Ćw4 gr7 cz9N
2 Wykl 2 N5 Str04 rys12,13
MT PR1 dane gr7 (1)
BIOMECHANIKA, Biomech.sprawozdanie nr2, Monika Grabowska gr
HLP - barok - opracowania lektur, 5. Sebastian Grabowiecki, Rymy duchowne – z Setnika pierwszego I,
BIOMECHANIKA, Biomech.sprawozdanie nr3, Monika Grabowska gr
więcej podobnych podstron