Zeszyty Problemowe – Maszyny Elektryczne Nr 77/2007
257
Robert Rossa
BOBRME Komel, Katowice
POPRAWA CHARAKTERYSTYK ELEKTROMECHANICZNYCH
SILNIKÓW SynRM POPRZEZ WPROWADZENIE MAGNESÓW
TRWAŁYCH DO WIRNIKA
IMPROVEMENT OF ELECTROMECHANICAL CHARACTERISTICS
OF SynRM BY THE USE OF PERMANENT MAGNETS IN ROTOR
Abstract: This paper deals with comparison of electromechanical characteristics of SynRM and PMSynRM of
the same mechanical size. First the constructions of SynRM and PMSynRM are described shortly. Then the field
circuit method of PMSM parameters calculation, known as loading method [3 ÷ 5], is described. This method
after same changes have been used for calculation of electromechanical characteristics presented in the paper. It
is shown, that inserting of permanent magnets into the rotor of SynRM results in a significant improvement of
motor performance. Especially the maximal value of synchronous torque T
S.max
can be two times higher in
PMSynRM, still having better power factor and efficiency. It is shown that electromechanical characteristics
cos
ϕ
= f(P
m
) and
η
= f(P
m
) of PM-SynRM are better for the all range of loads comparing to SynRM..
1. Wstęp – konstrukcja silników SynRM
i PMSynRM
Od pewnego czasu w Polsce produkowane są
synchroniczne silniki reluktancyjne (skrót ang.
SynRM) o konstrukcji bazującej na blachach
z seryjnych silników indukcyjnych (Rys. 1.a).
Rozruch silników SynRM odbywa się poprzez
bezpośrednie przyłączenie uzwojenia stojana do
sieci dzięki obecności klatki rozruchowej
w wirniku. Silniki SynRM charakteryzują się
stosunkowo niską ceną jak na silniki synchro-
niczne, co wynika z prostoty konstrukcji
i zastosowania podzespołów silników induk-
cyjnych. Mają one jednakże kilka istotnych
wad: charakteryzują się niewielką wartością
maksymalną momentu synchronicznego T
S.max
,
niskim współczynnikiem mocy cos
ϕ
, ich moc
znamionowa P
N
w typoszeregu jest obniżona
o jeden stopień w stosunku do silnika indukcyj-
nego o tych samych wymiarach gabarytowych.
W celu poprawy charakterystyk elektromecha-
nicznych silników SynRM w BOBRME „Ko-
mel” podjęto prace nad konstrukcją tzw. syn-
chronicznego silnika reluktancyjnego dowzbu-
dzanego magnesami trwałymi (skrót ang. PM-
SynRM), pokazaną na Rys.1.b. Konstrukcja ta
jest rozwinięciem konstrukcji produkowanych
w Polsce silników SynRM bazujących na pod-
zespołach silników indukcyjnych [1, 2].
Stojan silnika PMSynRM z Rys.1.b jest kon-
strukcyjnie identyczny jak stojan silnika induk-
cyjnego, zarówno pod względem wykroju bla-
chy jak i typu uzwojenia.
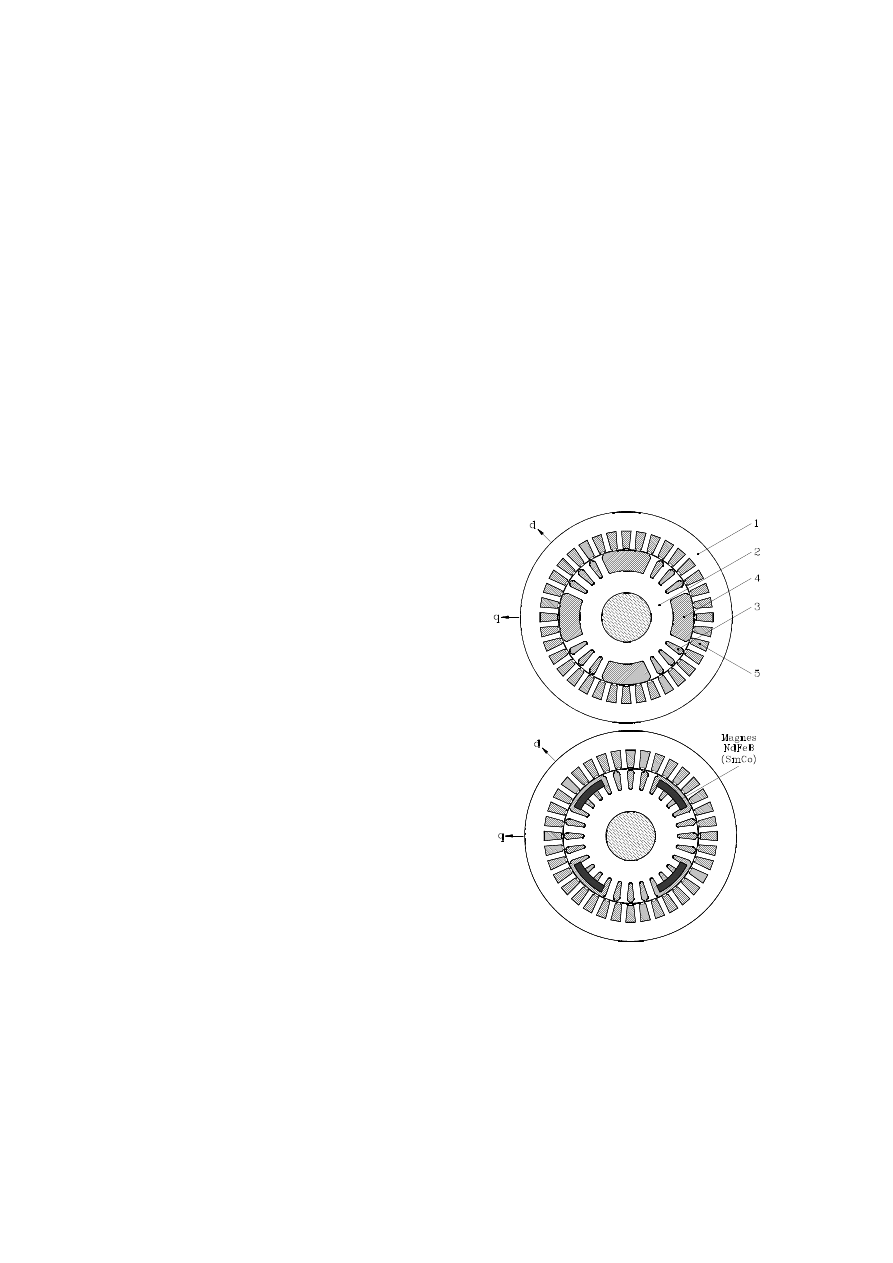
Rys.1. Przekroje poprzeczne silników SynRM
(a) i PMSynRM (b)
Blacha wirnika ma wycięte kilka zębów na
każdej podziałce biegunowej, a w miejscach po
wyciętych zębach wstawiono magnesy trwałe
NdFeB (lub SmCo). Wirnik posiada ponadto
uzwojenie klatkowe odlewane z aluminium, za-
pewniające asynchroniczny moment rozru-
chowy. W wirniku silnika z Rys. 1.b można
wyróżnić dwie osie magnetyczne:
a)
b)
Zeszyty Problemowe – Maszyny Elektryczne Nr 77/2007
258
• oś „d” leżącą na kierunku wyciętych zębów
i magnesów trwałych, jest to oś w której
obwód magnetyczny ma dużą reluktancję
1/
Λ
d
(przenikalność magnetyczna względna
aluminium oraz magnesów NdFeB lub
SmCo jest w przybliżeniu równa jedności);
• oś „q” leżącą na kierunku pozostawionych
zębów wirnika, jest to oś w której obwód
magnetyczny ma małą reluktancję 1/
Λ
q
.
Z analizy teoretycznej parametrów silników
SynRM i PMSynRM opartej na teorii maszyn
synchronicznych wynika, iż wprowadzenie wy-
sokoenergetycznych magnesów trwałych do
obwodu wirnika, jak pokazano na Rys. 1.b, po-
winno przyczynić się do znacznej poprawy cha-
rakterystyk elektromechanicznych silnika PM-
SynRM przy pracy synchronicznej w stosunku
do silnika SynRM o tej samej wielkości mecha-
nicznej i prędkości synchronicznej. Powinna
nastąpić
m.in.
poprawa
charakterystyk:
P
ei
= f(
δ
i
), cos
ϕ
= f(P
m
),
η
= f(P
m
)). Aby to
potwierdzić, opracowano w BOBRME „Ko-
mel” algorytmy i programy do obliczania cha-
rakterystyk
elektromechanicznych
silników
SynRM i PMSynRM przy pracy synchronicznej.
Opracowane algorytmy obliczeniowe bazują na
zastosowaniu tzw. metody polowo-obwodowej
obciążeniowej, omówionej w punkcie 2 artykułu
[3 ÷ 5]. W wyniku ich zastosowania możliwe
jest bezpośrednie porównanie różnorodnych cha-
rakterystyk elektromechanicznych obu typów
silników. Wyniki porównania wybranych cha-
rakterystyk omówiono w punkcie 3 artykułu.
2. Metoda polowo-obwodowa obciążenio-
wa
W metodzie polowo – obwodowej obciążenio-
wej, charakterystyki elektromechaniczne silnika
PMSynRM (lub ogólniej PMSM) dla pracy
synchronicznej obliczane są w oparciu o kla-
syczne równania silnika synchronicznego, wy-
nikające z jego schematu zastępczego i wykresu
wskazowego dla układu współrzędnych dq0
(Rys. 2). Parametry skupione wykresu wskazo-
wego mające zasadniczy wpływ na pracę sil-
nika synchronicznego: reaktancja magnesująca
w osi podłużnej X
md
i poprzecznej X
mq
oraz na-
pięcie E
0
indukowane w uzwojeniu twornika
przez wirujące magnesy trwałe, obliczane są dla
poszczególnych punktów pracy silnika z wyko-
rzystaniem
stałoprądowej,
dwuwymiarowej
analizy MES rozkładu pola magnetycznego na
przekroju poprzecznym maszyny. Przy oblicza-
niu w/w parametrów skupionych uwzględniana
jest ich zależność od aktualnego obciążenia sil-
nika, tzn. od aktualnych dla analizowanego
punktu pracy poziomów nasycenia w obwodzie
magnetycznym silnika.
I
d
I
q
I
1
E
0
V
1
E
i
jI
d
X
md
jI
1
X
l
I
1
R
1
oś d
δ
ϕ
β
δ
i
ϕ
i
oś q
kierunek obr.
jI
q
X
mq
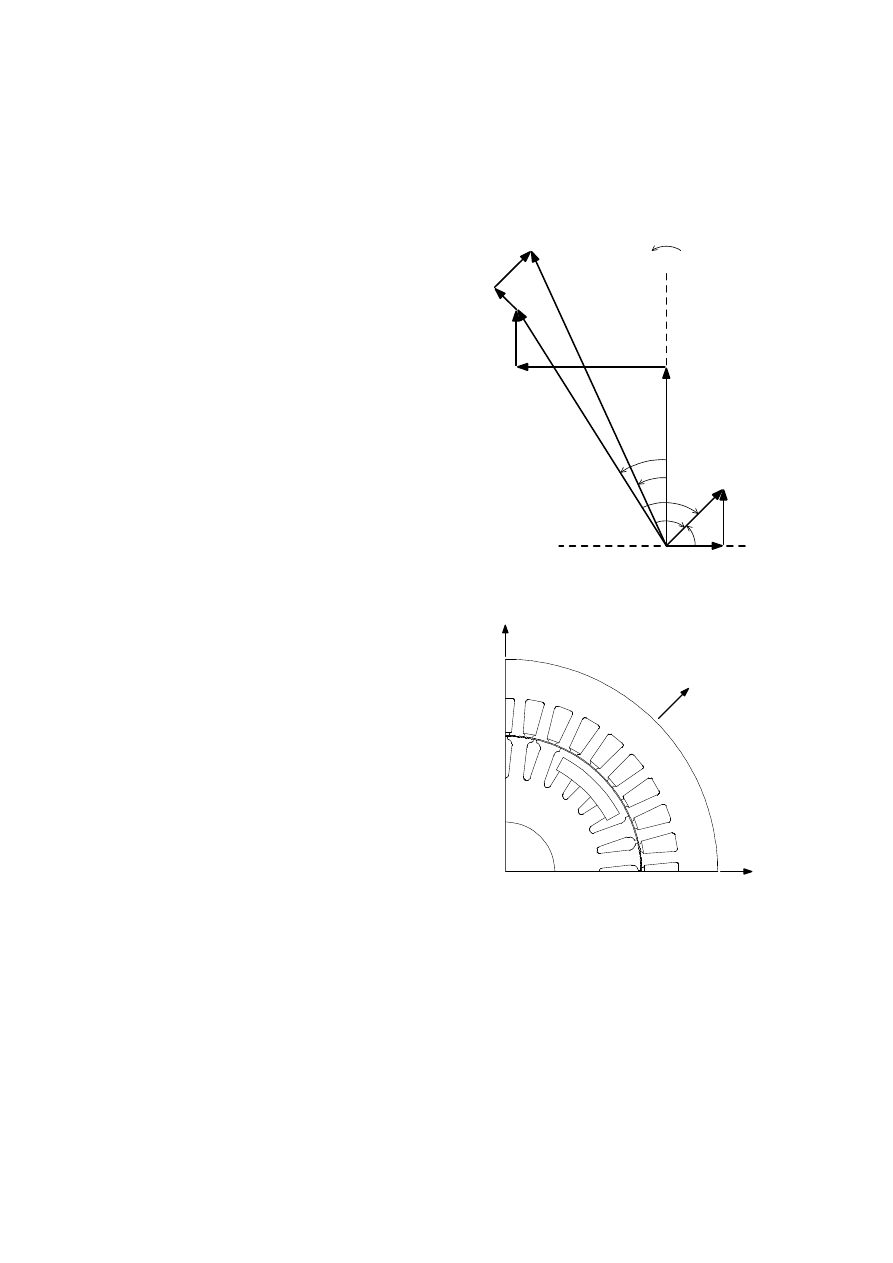
Rys.2. Wykres wskazowy silnika synchronicz-
nego (w tym PMSynRM)
Oś d wirnika,
Oś fazy A
A+
N
Oś q
S
Oś q
A−
B−
C+
C+
B−
A+
B−
C+
A−
Rys.3. Model silnika PMSynRM w dziedzinie
MES. Ze względu na symetrię obwodu elektro-
magnetycznego model obejmuje jedną po-
działkę biegunową
Idea metody polowo – obwodowej obciążenio-
wej
bazuje
na
możliwości
obliczenia,
z wykorzystaniem modelu silnika w dziedzinie
MES, modułu wskazu napięcia szczelinowego
E
i
oraz kąta fazowego
δ
i
+ π/2 tegoż wskazu,
odpowiadających aktualnemu przy danym ob-
ciążeniu
rozkładowi
pola
magnetycznego
w silniku, zakładając że znany jest moduł I
1
Zeszyty Problemowe – Maszyny Elektryczne Nr 77/2007
259
oraz kąt fazowy
β
wskazu prądu stojana
(Rys. 2).
Model MES silnika jest tak przygotowywany,
że oś fazy A uzwojenia stojana (wybrana jako
faza odniesienia) pokrywa się z osią d wirnika
(Rys. 3). Wówczas jeśli założy się, że model
MES będzie odpowiadać chwili czasowej t = 0,
a wartość chwilowa prądu fazy A opisana jest
zależnością:
)
cos(
2
)
(
1
A
β
ω +
⋅
⋅
=
t
I
t
i
(1)
to występujący w (1) kąt fazowy
β
wskazu
prądu I
1
odpowiada jednocześnie kątowi prze-
strzennemu pomiędzy wektorem przepływu
stojana F
s
a wektorem przepływu wzbudzenia
F
f
. Dzięki temu w modelu MES silnika uprasz-
cza się pozycjonowanie przepływu stojana F
s
względem osi d wirnika [4]. Ze względu na sy-
metrię obwodu magnetycznego model MES
obejmuje tylko jedną podziałkę biegunową sil-
nika.
Po obliczeniu w MES rozkładu pola magne-
tycznego na przekroju poprzecznym silnika dla
zadanego modułu prądu I
1
i kąta
β
, obliczany
jest następnie rozkład przestrzenny wzdłuż
szczeliny powietrznej wektorowego potencjału
magnetycznego A
Z
(x), gdzie x oznacza pozycję
wzdłuż obwodu szczeliny powietrznej. Rozkład
ten odpowiada wypadkowemu dla danego
punktu pracy silnika strumieniowi w szczelinie
powietrznej
Φ
, wynikającemu ze współdziała-
nia przepływów wzbudzenia F
f
i stojana F
s
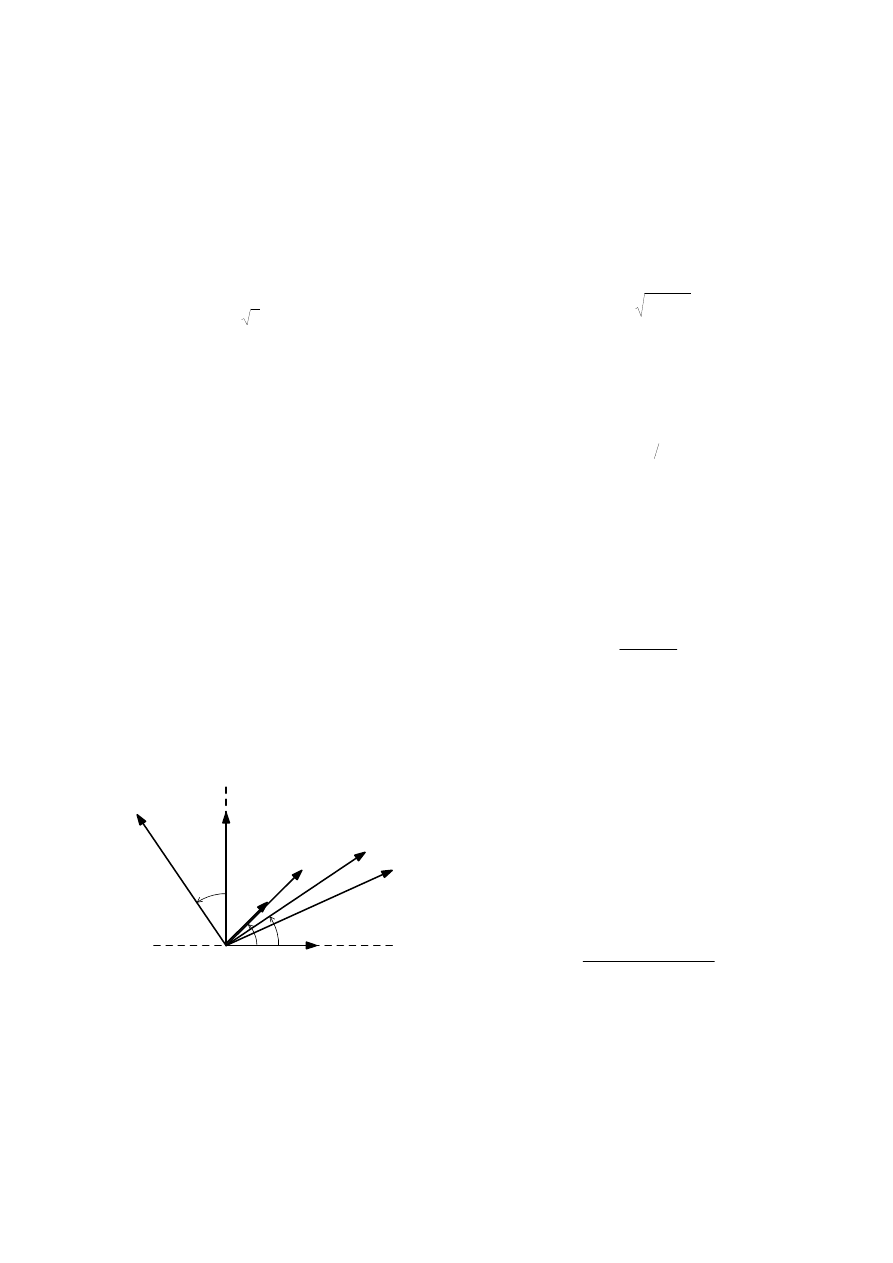
(Rys. 4).
I
1
E
0
E
i
oś q
oś d
δ
i
F
s
β
δ
i
F
f
F
δ
δδ
δ
oś fazy A
Φ
Φ
Φ
Φ
Rys.4. Wykres
przepływów
i
strumienia
z zaznaczeniem kątów
β
i
δ
i
Obliczony rozkład przestrzenny potencjału ma-
gnetycznego A
Z
(x) odpowiadający jednej po-
działce biegunowej silnika poddawany jest
analizie harmonicznej, w celu obliczenia
współczynników szeregu Fouriera a
1
i b
1
dla
jego podstawowej harmonicznej. Współczyn-
niki a
1
i b
1
reprezentują odpowiednio połowę
strumienia magnetycznego w osi podłużnej sil-
nika
Φ
d
oraz połowę strumienia w osi po-
przecznej
Φ
q
[3 ÷5].
Znając współczynniki a
1
i b
1
obliczany jest wy-
padkowy strumień magnetyczny
Φ
w szczelinie
powietrznej silnika, odpowiadający zadanemu
modułowi prądu I
1
oraz zadanemu kątowi fazo-
wemu wskazu prądu
β
:
2
1
2
1
2
b
a
L
Φ
Fe
+
⋅
⋅
=
(2)
gdzie L
Fe
to długość czynna pakietu żelaza. Na-
stępnie obliczane jest napięcie szczelinowe E
i
oraz kąt fazowy
δ
i
wektora strumienia wypad-
kowego
Φ
w szczelinie powietrznej:
s
u
i
k
k
z
f
E
⋅
⋅
⋅
⋅
⋅
=
1
1
1
44
.
4
Φ
(3)
(
)
1
1
a
b
arctg
i
=
δ
(4)
We wzorze (3) f
1
oznacza częstotliwość prądu
stojana, z
1
liczbę zwojów szeregowych w fazie
uzwojenia, k
u1
i k
s
odpowiednio współczynnik
uzwojenia i skosu.
Znając moduł napięcia szczelinowego E
i
oraz
kąt fazowy
δ
i
, obliczana jest na podstawie za-
leżności (5) reaktancja magnesująca w osi po-
przecznej X
mq
dla danego punktu pracy silnika:
β
δ
sin
sin
1
⋅
⋅
=
I
E
X
i
i
mq
(5)
W celu obliczenia reaktancji X
md
i napięcia E
0
zakłada się liniowość równań maszyny wokół
obliczanego punktu pracy. Przy takim założeniu
można nieznacznie (2 ÷ 5 %) zwiększyć moduł
prądu obciążenia I
1
o przyrost
∆
I
1
w modelu
MES silnika, przyjmując że zmiana ta nie
wpłynie na zmianę stanu nasycenia obwodu
magnetycznego [3 ÷ 5]. Po dodatkowym obli-
czeniu w MES rozkładu pola w silniku dla I
1
’
oraz po obliczeniu E
i
’ i
δ
i
’ można, na podstawie
równań (6) i (7), obliczyć parametry schematu
zastępczego X
md
i E
0
, odpowiadające danemu
punktowi pracy silnika:
β
β
δ
δ
cos
cos
cos
cos
'
1
1
'
'
⋅
−
⋅
⋅
−
⋅
=
I
I
E
E
X
i
i
i
i
md
(6)
md
i
i
X
I
E
E
⋅
⋅
−
⋅
=
β
δ
cos
cos
1
0
(7)
W przedstawionej metodzie kąt fazowy
β
wskazu prądu fazowego jest wielkością zadaną.
Jeśli analizowany silnik jest zasilany ze źródła
prądowego to znany jest również moduł wskazu
prądu I
1
. Natomiast w przypadku zasilania sil-
nika ze źródła napięciowego moduł wskazu
prądu I
1
musi być obliczony iteracyjnie, tak aby
Zeszyty Problemowe – Maszyny Elektryczne Nr 77/2007
260
spełnione było równanie napięciowe silnika.
Obliczenia iteracyjne można wykonać np. me-
todą Newtona – Raphsona lub tzw. metodą
siecznych [4].
Po iteracyjnym obliczeniu modułu prądu obcią-
żenia I
1
oraz odpowiadających mu parametrów
E
i
,
δ
i
, obliczane są dalej:
• kąt mocy
δ
w oparciu o zależność:
1
1
1
1
1
cos
sin
sin
sin
R
I
X
I
E
V
i
i
⋅
⋅
−
⋅
⋅
+
⋅
=
⋅
β
β
δ
δ
(8)
• współczynnik mocy cos
ϕ
:
δ
β
δ
β
ϕ
sin
cos
cos
sin
cos
⋅
−
⋅
=
(9)
• moc elektryczna P
ei
w szczelinie powietrznej
silnika:
(
)
i
i
i
I
I
E
P
δ
β
δ
β
sin
cos
cos
sin
3
1
1
ei
⋅
⋅
−
⋅
⋅
⋅
⋅
=
(10)
• moc elektryczna wejściowa P
1
:
(
)
δ
β
δ
β
sin
cos
cos
sin
3
1
1
1
1
⋅
⋅
−
⋅
⋅
⋅
⋅
=
I
I
V
P
(11)
• moc mechaniczna na wale P
m
:
m
ei
m
P
P
P
∆
−
=
(12)
• sprawność η:
1
m
P
P
=
η
(13)
W opracowanym algorytmie obliczeń charak-
terystyk elektromechanicznych uwzględniono
także wpływ strat w żelazie
∆
P
Fe
. Straty
∆
P
Fe
są
obliczane osobno i są uwzględnione w schema-
cie zastępczym silnika jako dodatkowy rezystor
[6].
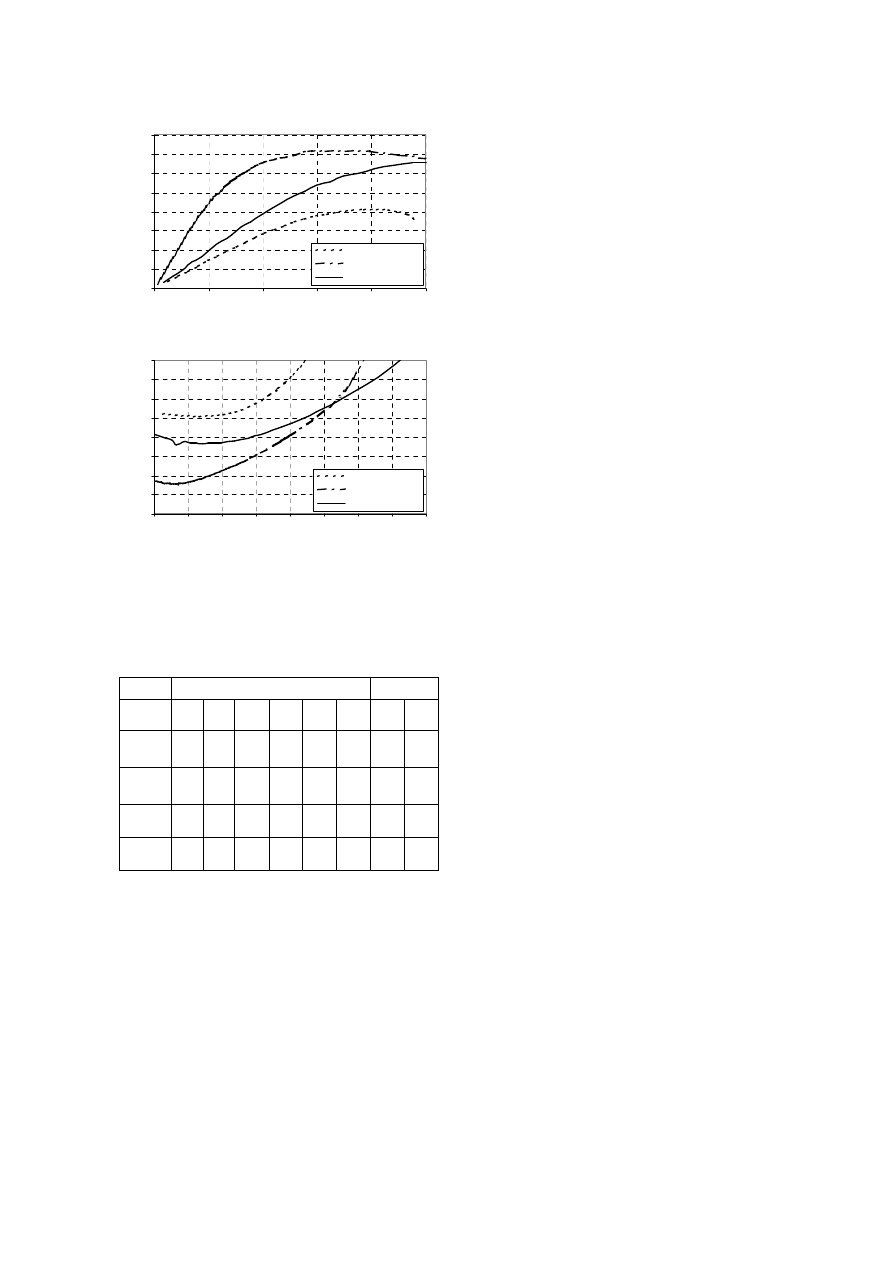
3. Porównanie charakterystyk elektro-
mechanicznych PMSynRM i SynRM
W celu porównania charakterystyk elektrome-
chanicznych silników SynRM i PMSynRM tej
samej wielkości mechanicznej, obliczono wy-
brane charakterystyki silnika SynRM typu
RSh80-4BM1 (wielkość mechaniczna 80 mm,
2p=4, Rys. 1.a) oraz silnika PMSynRM 2p=4
o identycznym wykroju blach stojana i wirnika,
o tej samej długości pakietu żelaza i o takiej
samej wysokości szczeliny powietrznej (patrz
Rys. 1.b). Silnik typu RSh80-4BM1 był wcze-
śniej zaprojektowany, wykonany i przebadany
w BOBRME „Komel”. Stwierdzona w wyniku
obliczeń elektromagnetycznych i badań opty-
malna liczba zwojów uzwojenia stojana wyno-
siła dla tego silnika z
1
= 402 i taką liczbę zwo-
jów przyjęto do obliczeń charakterystyk elek-
tromechanicznych zamieszczonych niżej. W
wirniku silnika SynRM wycięte było syme-
trycznie po trzy zęby na każdej podziałce bie-
gunowej, jak pokazano na Rys. 1.b. W modelu
silnika PMSynRM w miejscu wyciętych zębów
wirnika umieszczono magnesy NdFeB typu
N33SH, namagnesowane odpowiednio dla
2p=4.
Obliczenia charakterystyk elektromechanicz-
nych silnika SynRM, podobnie jak silnika PM-
SynRM, wykonano metodą polowo-obwodową
obciążeniową, po odpowiednim zmodyfikowa-
niu rozwiązywanych w niej równań, stosownie
do schematu zastępczego silnika SynRM. Na
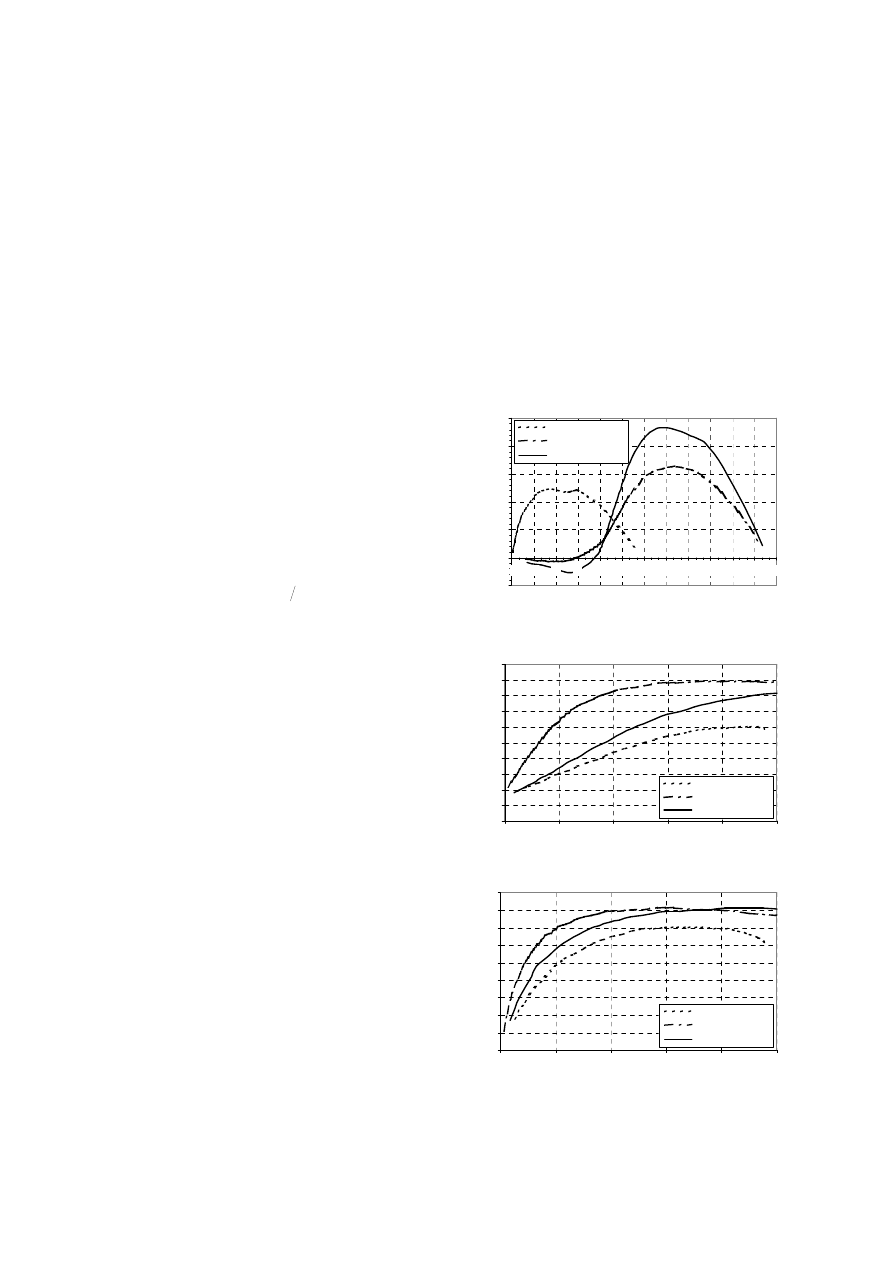
Rys. 5 ÷ 9 przedstawiono porównanie wybra-
nych obliczonych charakterystyk elektrome-
chanicznych silników PMSynRM i SynRM.
-500
0
500
1000
1500
2000
2500
0
15
30
45
60
75
90
105 120 135 150 165 180
delta_i
P
e
i
RSh80-4BM1
PMSynRM z1=486
PMSynRM z1=402
Rys.5. Porównanie charakterystyk P
ei
= f(
δ
i
)
silników SynRM i PMSynRM
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0
250
500
750
1000
1250
Pm
c
o
s
ϕϕϕϕ
RSh80-4BM1
PMSynRM z1=486
PMSynRM z1=402
Rys.6. Porównanie charakterystyk cos
ϕ
= f(P
m
)
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0
250
500
750
1000
1250
Pm
ηηηη
RSh80-4BM1
PMSynRM z1=486
PMSynRM z1=402
Rys.7. Porównanie charakterystyk
η
= f(P
m
)
Zeszyty Problemowe – Maszyny Elektryczne Nr 77/2007
261
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0
250
500
750
1000
1250
Pm
c
o
s
ϕϕϕϕ
*
ηηηη
RSh80-4BM1
PMSynRM z1=486
PMSynRM z1=402
Rys.8. Porównanie charakterystyk
cos
ϕ
⋅η
= f(P
m
)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
0
250
500
750
1000
1250
1500
1750
2000
Pm
I1
RSh80-4BM1
PMSynRM z1=486
PMSynRM z1=402
Rys.9. Porównanie charakterystyk I
1
= f(P
m
)
Tabela 1. Porównanie obliczonych i zmierzo-
nych parametrów silnika PMSynRM 2p = 4,
wielkości mechanicznej 80 mm i silnika SynRM
typu RSh80-4BM1 dla: z
1
= 402, U
LL
= 400 V,
n = 1500 obr/min.
Obciążenie
Bieg jałowy
Typ sil-
nika
P
W
T
N⋅⋅⋅⋅m
T
S.max
N⋅⋅⋅⋅m
I
(400V)
A
η
η
η
η
---
cos
ϕ
ϕ
ϕ
ϕ
---
I
0 (400V)
A
cos
ϕ
ϕ
ϕ
ϕ
0
---
RSh80-
4BM1
obliczenia
550
3.5
7.4
2.6
0.66 0.46 2.65 0.15
RSh80-
4BM1
pomiar
550
3.5
6.6
2.72 0.62 0.47 2.68 0.15
PMSynRM
obliczenia
550
3.5
14.6
1.9
0.74 0.57 2.07 0.15
PMSynRM
pomiar
550
3.5
12.3 2.01 0.72 0.55 2.23 0.15
Analizując charakterystyki z Rys. 5 ÷ 9 można
stwierdzić, że wprowadzenie magnesów trwa-
łych do wirnika silnika SynRM w sposób poka-
zany na Rys. 1.b wpływa zdecydowanie na po-
prawę parametrów silnika. Z Rys. 7 widać, iż
przy zachowaniu tej samej liczby zwojów sze-
regowych z
1
w silniku PMSynRM, maksymalna
moc szczelinowa P
ei
, a zatem także moment
synchroniczny maksymalny T
S.max
, są dla tego
silnika o około 100 % większe w stosunku do
silnika SynRM. Dla całego zakresu obciążeń
mocą P
m
, silnik PMSynRM charakteryzuje się
lepszym współczynnikiem mocy cos
ϕ
oraz
wyższą sprawnością
η
. Korzystniejsze charak-
terystyki cos
ϕ
= f(P
m
) oraz
η
= f(P
m
) silnika
PMSynRM przekładają się na zdecydowanie
korzystniejsze charakterystyki cos
ϕ
∗
η
= f(P
m
)
oraz I
1
= f(P
m
) (Rys. 8 i 9). Moc znamionowa
P
N
silnika PMSynRM może być podniesiona
w stosunku do mocy znamionowej silnika
SynRM (dla PMSynRM nie ma konieczności
obniżania mocy P
N
o jeden stopień w typosze-
regu w stosunku do silnika indukcyjnego, jak to
miało miejsce w przypadku SynRM). Zwięk-
szenie liczby zwojów z
1
w silniku PMSynRM,
tak aby uzyskać podobną wartość maksymalną
momentu synchronicznego T
S.max
jak w silniku
SynRM skutkuje dalszą, znaczącą poprawą cha-
rakterystyk elektromechanicznych cos
ϕ
= f(P
m
)
i
η
= f(P
m
). Powyższe wnioski z wyników obli-
czeń charakterystyk elektromechanicznych zo-
stały potwierdzone badaniami laboratoryjnymi
w BOBRME „Komel” (patrz Tabela 1)
na modelu fizycznym PMSynRM.
Literatura
[1] T. Glinka, M. Jakubiec, A. Wieczorek, Silnik
asynchroniczny synchronizowany momentem reluk-
tancyjnym, Wiadomości Elektrotechniczne, Nr
2/2001.
[2] T. Glinka, M. Jakubiec, A. Wieczorek, Wpływ
rozwiązań konstrukcyjnych obwodu elektromagne-
tycznego na parametry silnika asynchronicznego
synchronizowanego
momentem
reluktancyjnym,
Wiadomości Elektrotechniczne, Nr 6/2001.
[3] M.A. Rahman, P. Zhou, Determinatiom of Satu-
rated Parameters of PM Motors Using Loading
Magnetic Fields, IEEE Trans. on Magnetics, Vol.
MAG-27, No. 5, pp. 3947-3950, Sep. 1991.
[4] M.A. Rahman, P. Zhou, Field-Based Analysis for
Permanent Magnet Motors, IEEE Trans. on Mag-
netics, Vol. MAG-30, No. 5, pp. 3664-3667, Sep.
1994.
[5] P. Zhou, M.A. Rahman, M.A. Jabbar, Field Cir-
cuit Analysis of Permanent Magnet Synchronous
Motors, IEEE Trans. on Magnetics, Vol. MAG-30,
No. 4, pp. 1350-1359, July 1994.
[6] V.B. Honsinger, Performance of Polyphase Per-
manent Magnet Machines, IEEE Trans. on Power
Apparatus and Systems, Vol. PAS-99, No. 4, 1980.
Praca powstała w wyniku realizacji projektu
badawczego nr 3 T10A 041 28
Autor
dr inż. Robert Rossa,
info@komel.katowice.pl
Branżowy Ośrodek Badawczo-Rozwojowy
Maszyn Elektrycznych „KOMEL”
40-203 Katowice, al. Roździeńskiego 188.
Wyszukiwarka
Podobne podstrony:
Wyznaczanie charakterystyk indukcyjnego silnika pierścieniowego, Elektrotechnika, Napędy
dudziński,układy napędowe,Charakterystyki mechaniczne silników elektrycznych
ćw.6.Wyznaczanie charakterystyk indukcyjnego silnika pierścieniowego2, Elektrotechnika - notatki, sp
Wyznaczanie charakterystyk indukcyjnego silnika pierścieniowego, Elektrotechnika, Napędy
2 Modelowanie układów automatyki (silnik elektryczny prądu stałego z magnesem trwałym)
3, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.4 silnik szeregowy
Badanie układu napędowego z silnikiem bezszczotkowym z magnesami trwałymi
CHARAK~3, Elektrotechnika-materiały do szkoły, Automatyka
Wyznaczanie charakterystyki elektrody szklanej, analiza instrumentalna
indukcyjny pierść, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.5 - Silnik
dudziński,układy napędowe,Hamowanie elektryczne silników indukcyjnych
antal,elektrotechnika, Silnik bocznikowy prądu stałego
5 Miar pH metryczne Charakterystyka elektrody
Hyypia Jorma Silnik Napędzany Energią Stałych Magnesów
charakterystyka obcowzbudnego silnika
dudziński,układy napędowe,Metody kształtowania przebiegu charakterystyk mechanicznych silnika indukc
Elektryka silnika Golf IV
ELEKTROTECH 5 silniki indukcyjne
więcej podobnych podstron