PROJEKTOWANIE I BUDOWA
PROJEKTOWANIE I BUDOWA
PROJEKTOWANIE I BUDOWA
PROJEKTOWANIE I BUDOWA
OBIEKT
OBIEKT
OBIEKT
OBIEKTÓ
Ó
Ó
ÓW LATAJ
W LATAJ
W LATAJ
W LATAJĄ
Ą
Ą
ĄCYCH
CYCH
CYCH
CYCH
II
II
II
II
Kryteria oceny
własności lotnych
Kryteria oceny własności lotnych
• Kryterium częstości własnej i tłumienia
ruchu podłużnego
• Częstotliwościowo-fazowe kryterium
Neala-Smitha
• Kryterium nachylenia charakterystyki
fazowej (Gibsona)
• Kryterium oczekiwanej sterowności
samolotu
Kryteria oceny własności lotnych – c.d.
• Kryterium sterowalności C*
• Kryterium sterowalności Gibsona
• Kryterium wielkości sił przykładanych do
sterownic
• Kryterium ruchu przechylania
• Kryterium stateczności spiralnej
• Kryterium oscylacji holendrowania
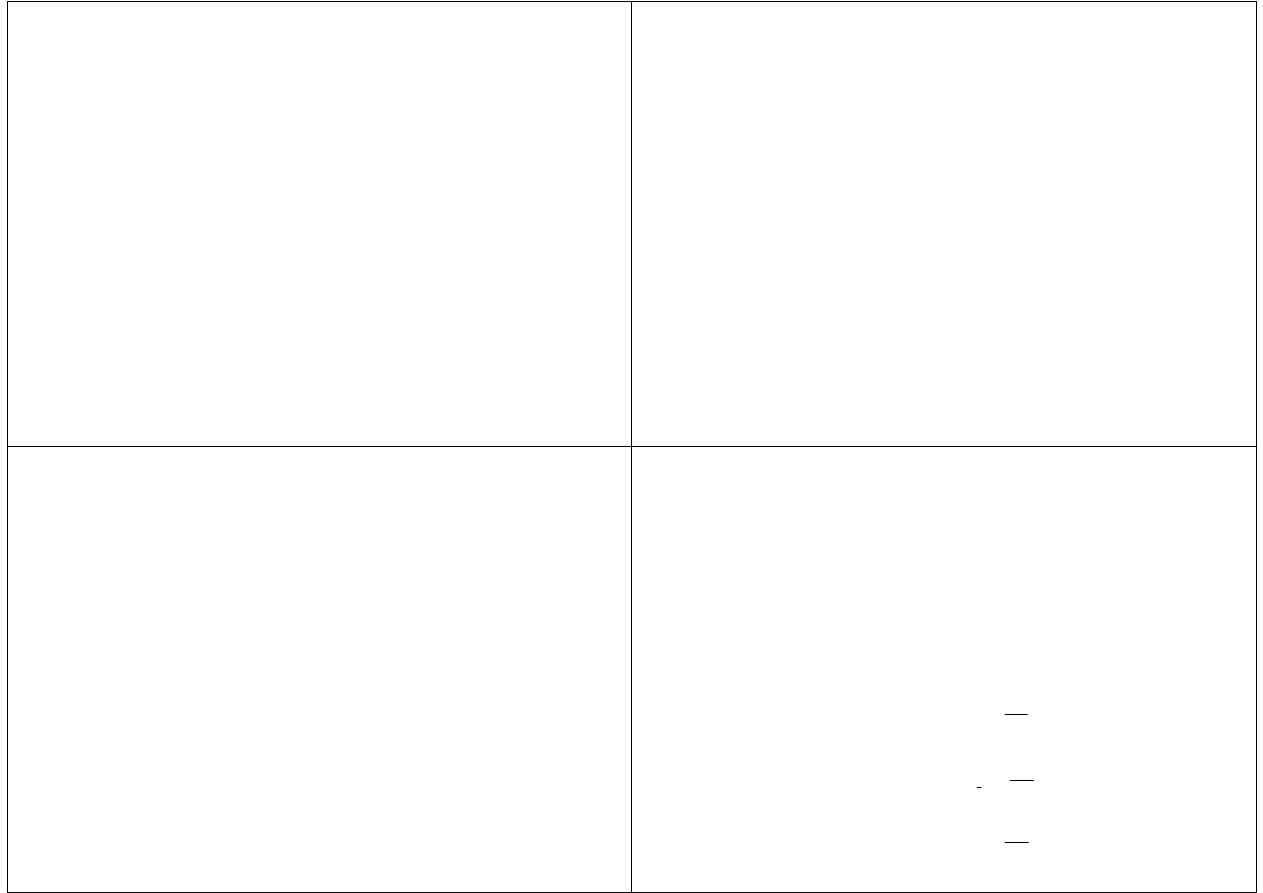
Kryterium częstości własnej i tłumienia ruchu podłużnego
zagadnienie na wartości własne:
[
]
0
x
I
A
=
−
λ
rozwiązanie
ogólnie:
η
ξ
λ
i
+
=
okres:
η
π
2
T
=
czas stłumienia amplitudy (
ξ<0):
ξ
2
ln
T
2
1
−
=
czas podwojenia amplitudy (
ξ>0):
ξ
2
ln
T
2
=
Kryterium częstości własnej i tłumienia ruchu podłużnego
Kryterium częstości własnej i tłumienia ruchu podłużnego
Dodatkowe pojęcia
jeżeli wartości własne mają postać:
to częstość drgań nie tłumionych definiujemy:
a współczynnik tłumienia:
η
ξ
λ
i
+
=
2
2
η
ξ
ω
+
=
n
2
2
η
ξ
ξ
ζ
+
−
=
d
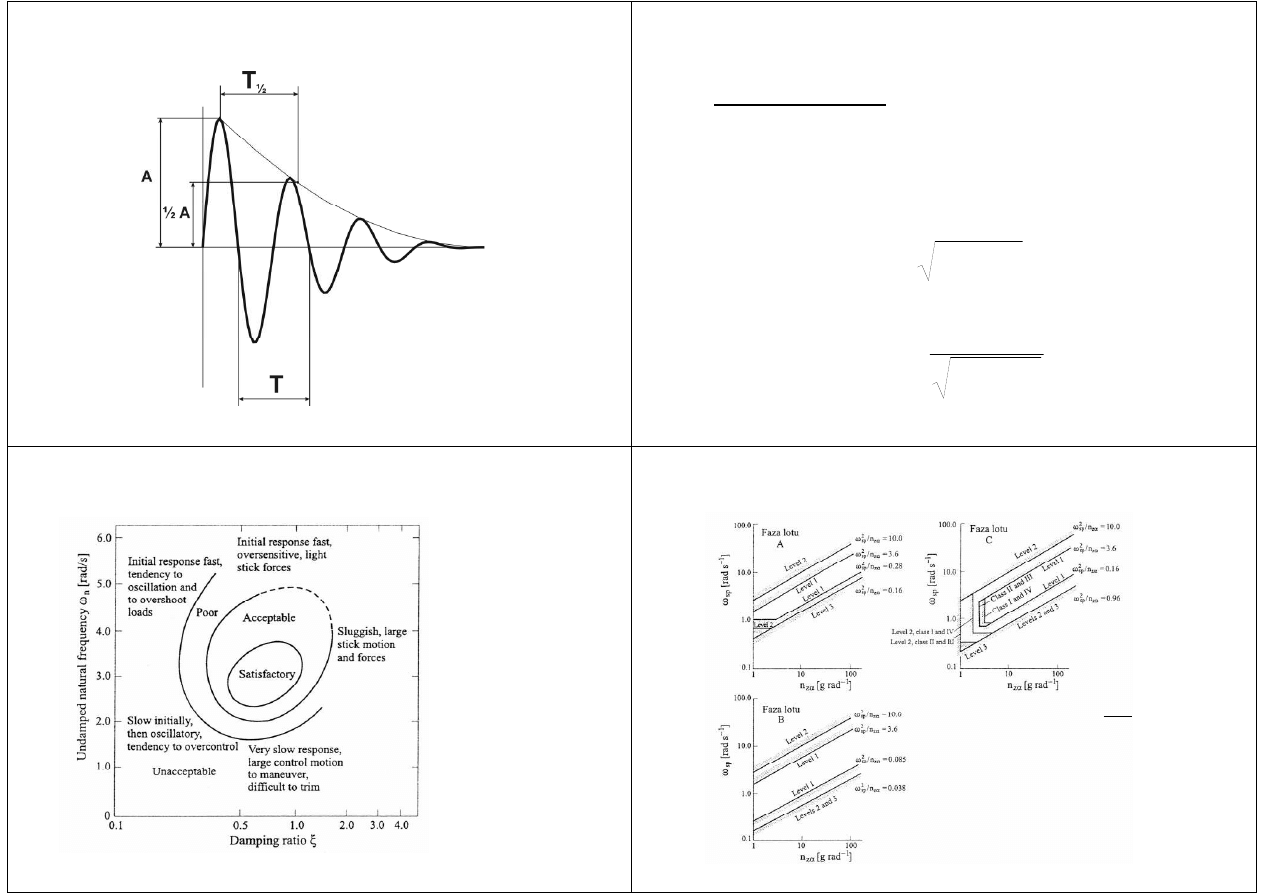
Kryterium częstości własnej i tłumienia ruchu podłużnego
Wpływ nie tłumionej
częstości własnej
ω
n
i
bezwymiarowego
współczynnika tłumienia
ξ, ruchu
krótkookresowego na
ocenę właściwości
pilotażowych samolotu:
obszar zalecany
(Satisfactory),
dopuszczalny
(Acceptable) oraz
nieprawidłowych
właściwości (Poor)
Kryterium częstości własnej i tłumienia ruchu podłużnego
def. gradientu:
α
α
∂
∂
=
z
z
n
n
Ocena poziomu akceptowalności
właściwości pilotażowych samolotu jako
funkcja częstości oscylacji
krótkookresowych
ω
n
i parametru n
z
α
;
odpowiednio poziomy akceptowalności
1 2 i 3 (Level l, 2, 3)
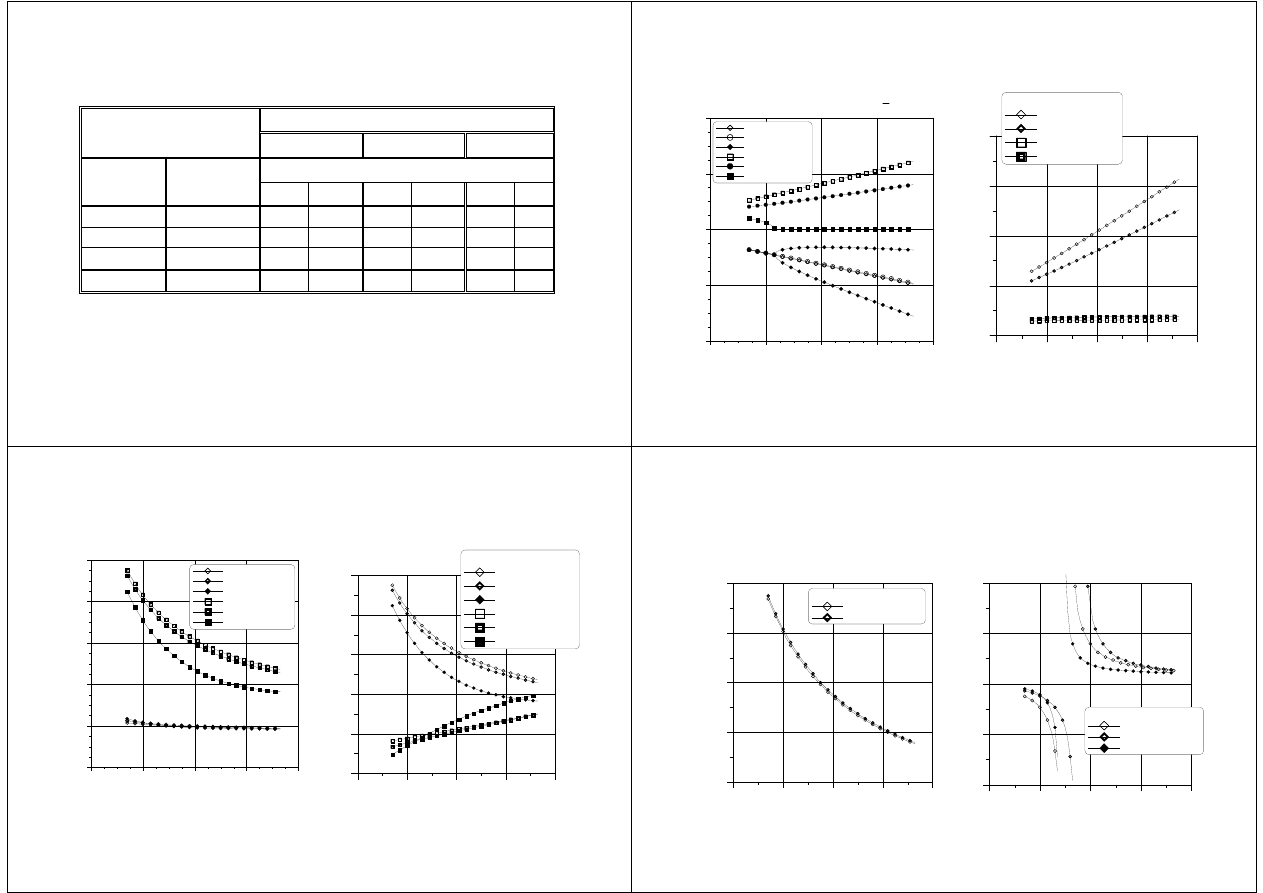
Zalecane wartości bezwymiarowego
współczynnika tłumienia
Poziom akceptowalności
Opis
1
2
3
Rodzaj
Faza
bezwymiarowy współczynnik tłumienia
ruchu
lotu
Min.
Max.
Min.
Max.
Min. Max.
krótkookresowy
kategoria A
0.35
1.30
0.25
2.00
0.10
-
krótkookresowy
kategoria B
0.30
2.00
0.20
2.00
0.10
-
krótkookresowy
kategoria C
0.50
-
0.35
2.00
0.25
-
fugoidalny
wszystkie
0.04
-
0.00
-
(N)
-
Uwagi:
o
Dla poziomu 3 dopuszcza się niestabilność ruchu fugoidalnego (N), pod warunkiem,
że okres oscylacji jest nie krótszy niż 55 s.
o
Wymagania określono dla przypadku, gdy częstość oscylacji krótkookresowych jest
co najmniej 10-krotnie większa od częstości oscylacji fugoidalnych.
Przykłady zmian częstości i współczynnika tłumienia
20
40
60
80
100
V [m/s]
-8
-4
0
4
8
ξ=f(V,Xc=26% SCA);
ξ=f(V,Xc=35% SCA);
ξ=f(V,Xc=45% SCA);
η=f(V,Xc=26% SCA);
η=f(V,Xc=35% SCA);
η=f(V,Xc=45% SCA);
η
ξ,η=f(V,Xc) (
λ=ξ+/−iη
gdzie: i=
√
-1
)
ξ
20
40
60
80
100
V [m/s]
0
2
4
6
8
w
s
p
ó
łc
z
y
n
n
ik
t
łu
m
ie
n
ia
ζ
d
n
ie
tł
u
m
io
n
a
c
z
ę
s
to
ś
ć
ω
n
d
ω
nd,ζd=f(V,Xc); α
ZH
=0 [deg];
ω
nd=f(V,Xc=26% SCA);
ω
nd=f(V,Xc=35% SCA);
ζ
d=f(V,Xc=26% SCA);
ζ
d=f(V,Xc=35% SCA);
ω
nd
ζ
d
ζ
d
=ξ/sqrt(ξ
2
+η
2
)
ω
nd
=sqrt(
ξ
2
+η
2
)
Przykład obliczeń – oscylacje szybkie (w funkcji prędkości lotu i wyważenia)
Przykłady zmian częstości i współczynnika tłumienia
20
40
60
80
100
V [m/s]
-0.1
0
0.1
0.2
0.3
0.4
ξ=f(V,Xc=26% SCA);
ξ=f(V,Xc=35% SCA);
ξ=f(V,Xc=45% SCA);
η=f(V,Xc=26% SCA);
η=f(V,Xc=35% SCA);
η=f(V,Xc=45% SCA);
η
ξ
ξ,η=f(V,Xc) (
λ=ξ+/−iη
gdzie: i=
√
___
-1
)
20
40
60
80
100
V [m/s]
-0.1
0
0.1
0.2
0.3
0.4
w
s
p
ó
łc
z
y
n
n
ik
t
łu
m
ie
n
ia
ζ
d
n
ie
tł
u
m
io
n
a
c
z
ę
s
to
ś
ć
ω
n
d
ω
nd,ζd=f(V,Xc); α
ZH
=0 [deg];
ω
nd=f(V,Xc=26% SCA);
ω
nd=f(V,Xc=35% SCA);
ω
nd=f(V,Xc=45% SCA);
ζ
d=f(V,Xc=26% SCA);
ζ
d=f(V,Xc=35% SCA);
ζ
d=f(V,Xc=45% SCA);
ω
nd
ζ
d
ζ
d
=ξ/sqrt(ξ
2
+η
2
)
ω
nd
=sqrt(
ξ
2
+η
2
)
Przykład obliczeń – oscylacje fugoidalne (w funkcji prędkości lotu i wyważenia)
Przykłady zmian czasu stłumienia do połowy
20
40
60
80
100
V [m/s]
0.1
0.2
0.3
0.4
0.5
T
1/2
[sek]
T
1/2
=f(V,Xc);
T
1/2
=f(V,Xc=26% SCA);
T
1/2
=f(V,Xc=35% SCA);
20
40
60
80
100
V [m/s]
-800
-400
0
400
800
T
1/2
[sek]
T
1/2
=f(V,Xc);
T
1/2
=f(V,Xc=26% SCA);
T
1/2
=f(V,Xc=35% SCA);
T
1/2
=f(V,Xc=45% SCA);
oscylacje szybkie fugoida
Obszary poziomów akceptowalności właściwości
pilotażowych samolotu wg kryterium Neala-Smitha
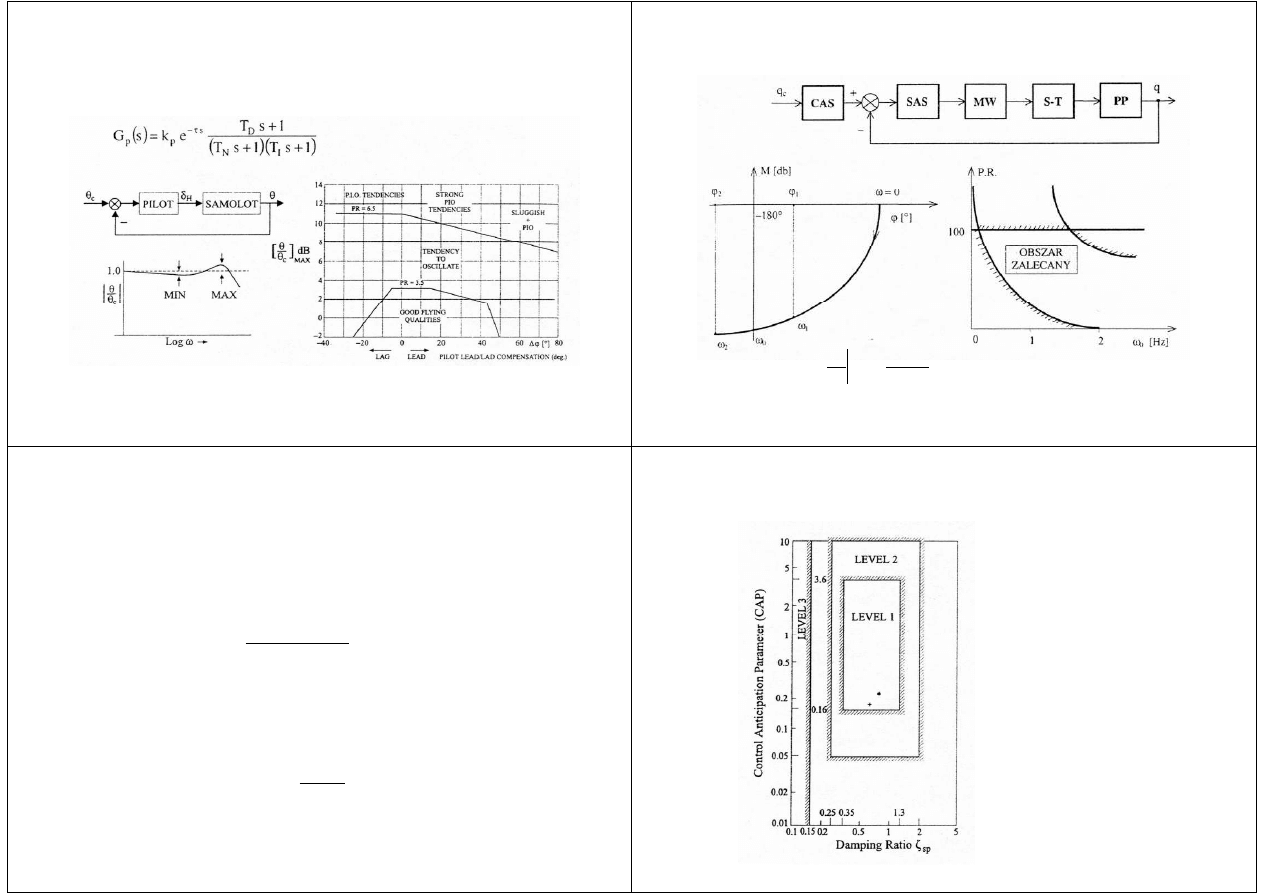
Kryterium nachylenia charakterystyki fazowej
Analizowany układ sterowania i parametry kryterium Gibsona
Hz
1
;
Hz
/
100
d
d
.
R
.
P
0
1
2
1
2
≈
°
≤
−
−
≅
=
−
=
ω
ω
ω
ϕ
ϕ
ω
ϕ
π
ϕ
Kryterium oczekiwanej sterowności samolotu
CAP – Control Anticipation Parameter
przy krótkookresowej aproksymacji:
]
g
s
/
rd
[
)
t
(
n
)
0
t
(
q
CAP
z
⋅
∞
→
∆
=
=
+
α
ω
z
2
sp
n
CAP
≅
Kryterium oczekiwanej sterowności samolotu
Kryterium CAP
dla fazy lotu C
Kryterium oczekiwanej sterowności
samolotu - CAP
Poziom akceptowalności
1
2
3
parametr oczekiwanej sterowności CAP
Faza
lotu
min.
max
min.
max
min.
max
A
0.28
1)
3.6
0.16
3)
10.0
0.16
-
B
0.085
3.6
0.038
10.0
0.038
-
C
0.16
2)
3.6
0.096
4)
10.0
0.096
-
Uwagi:
1}
dla
ω
sp
> 1.0,
2)
dla
ω
sp
> 0.6,
3)
dla
ω
sp
> 0.7,
4)
dla
ω
sp
> 0.4.
Norma MIL-STD-1797A dopuszcza minimalną wartość CAP = 0.05 dla drugiego po-
ziomu akceptowalności w fazie lotu C.
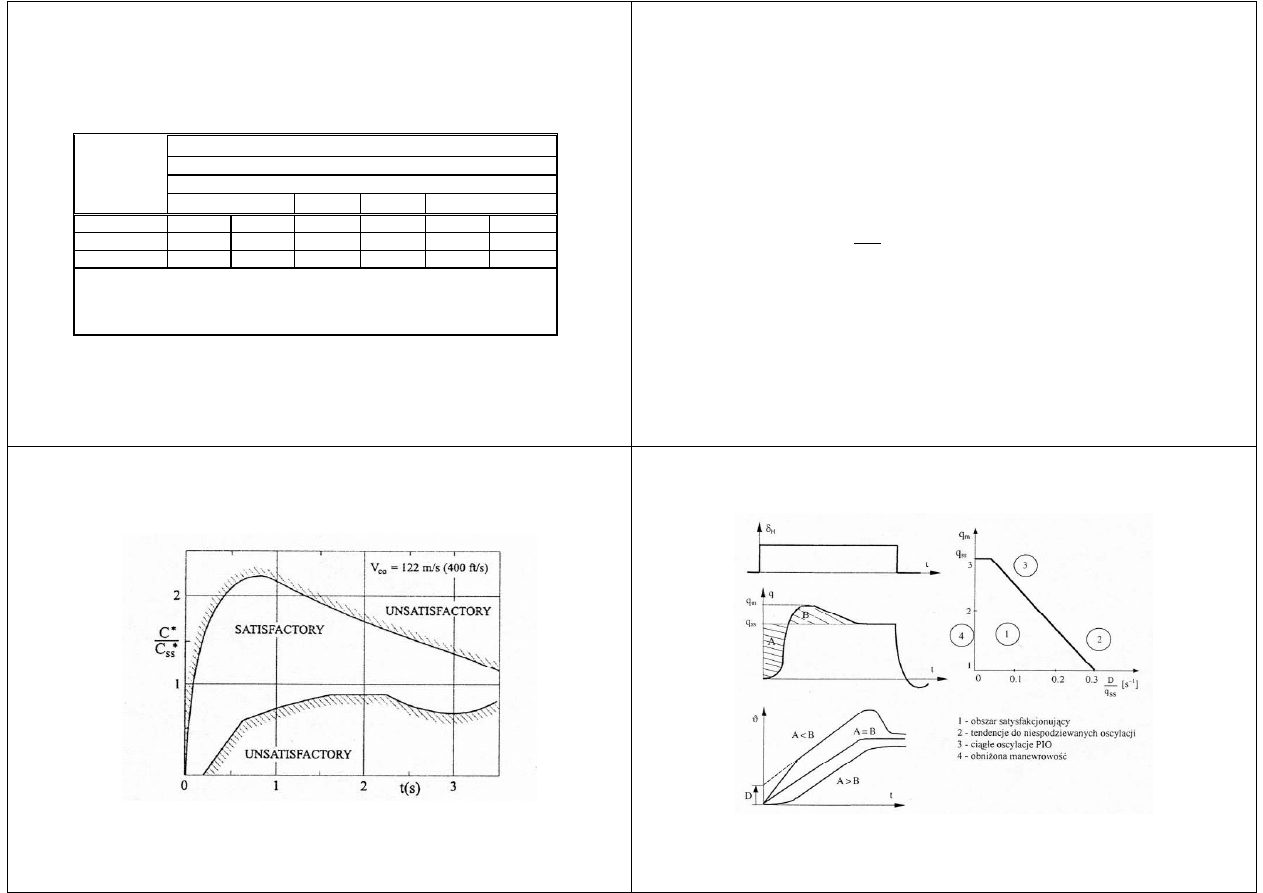
Kryterium sterowalności C*
Kryterium C* służy do oceny procesu
przejściowego ruchu pochylania po
skokowym wychyleniu sterownicy
)
t
(
q
l
n
)
t
(
n
);
t
(
q
g
U
)
t
(
n
)
t
(
C
p
z
zp
c
zp
*
•
+
∆
=
∆
+
∆
=
gdzie:
∆n
zp
– przyrost przyspieszenia odczuwalny przez pilota
∆n
z
– przyrost przyspieszenia środka masy samolotu
l
p
- odległość pilota od środka masy samolotu, l
p
> 0
gdy środek masy jest za pilotem
Kryterium sterowalności C*
Zalecane obszary trajektorii unormowanego parametru C*
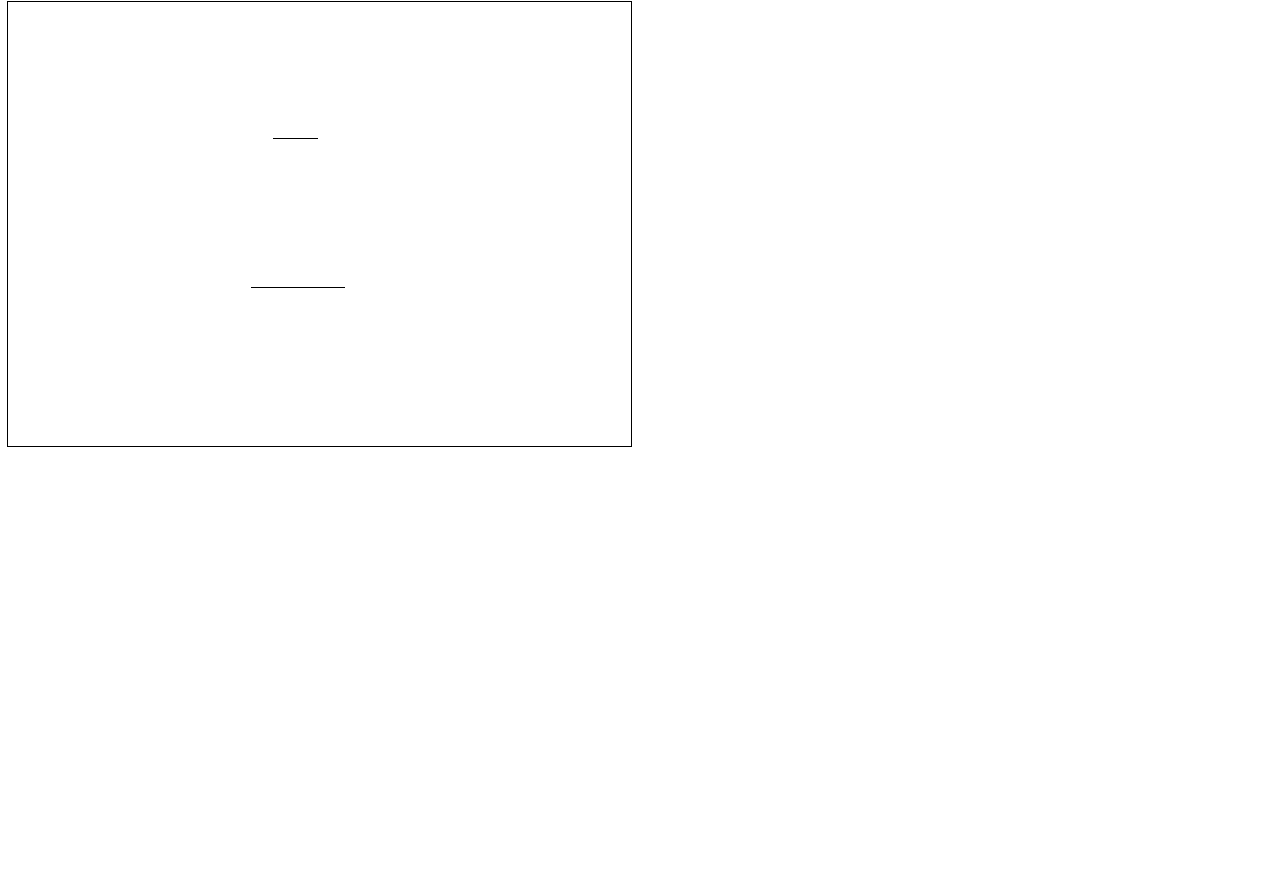
Kryterium sterowalności Gibsona
Parametry ruchu po skokowym wychyleniu steru wysokości oraz
zalecany obszar ich zmienności wg kryterium Gibsona
Kryterium wielkości sił przykładanych do
sterownic
Norma MIL-F8587C zaleca wybór gradientu
z przedziału:
]
g
/
N
[
n
P
zss
H
n
H
z
∂
∂
=
δ
]
g
/
N
[
)
1
n
(
A
max
z
n
H
z
−
=
δ
gdzie: n
z max
maksymalny dopuszczalny współczynnik obciążenia
A – parametr zależny od rodzaju sterownicy:
- dla drążka A
min
=93, A
max
=250
- dla wolantu A
min
=133, A
max
=370
Wyszukiwarka
Podobne podstrony:
Kryteria oceny własności lotnych (ruchy boczne)
dodatek+matematyczny+%28w%b3asno%9cci+wariancji+oraz+kryteria+oceny+estymator%f3w%29
kryteria oceny podręczników artykuł
Kryteria oceny zapisu KTG
Kryteria oceny w nauczaniu zintegrowanym klasa pierwsza(1)
Budowa i zasada działania układu pneumatycznego z?S oraz kryteria oceny
Kryteria oceny zajęć dydaktycznych, Materiały
Kryteria oceny rozprawki
Kryteria oceny dla właściwego doboru systemowych deskowań stropowych
KOŚCIELSKA M Kliniczne kryteria oceny emocji, Pedagogika specjalna, Kościelska M
Kryteria oceny projektow w rama Nieznany
Kryteria oceny testów ortograficznych i dyktand
Kryteria oceny prac stylistycznych
więcej podobnych podstron