PROJEKTOWANIE I BUDOWA
PROJEKTOWANIE I BUDOWA
PROJEKTOWANIE I BUDOWA
PROJEKTOWANIE I BUDOWA
OBIEKT
OBIEKT
OBIEKT
OBIEKTÓ
Ó
Ó
ÓW LATAJ
W LATAJ
W LATAJ
W LATAJĄ
Ą
Ą
ĄCYCH
CYCH
CYCH
CYCH
II
II
II
II
Kryteria oceny
własności lotnych
(ruchy boczne)
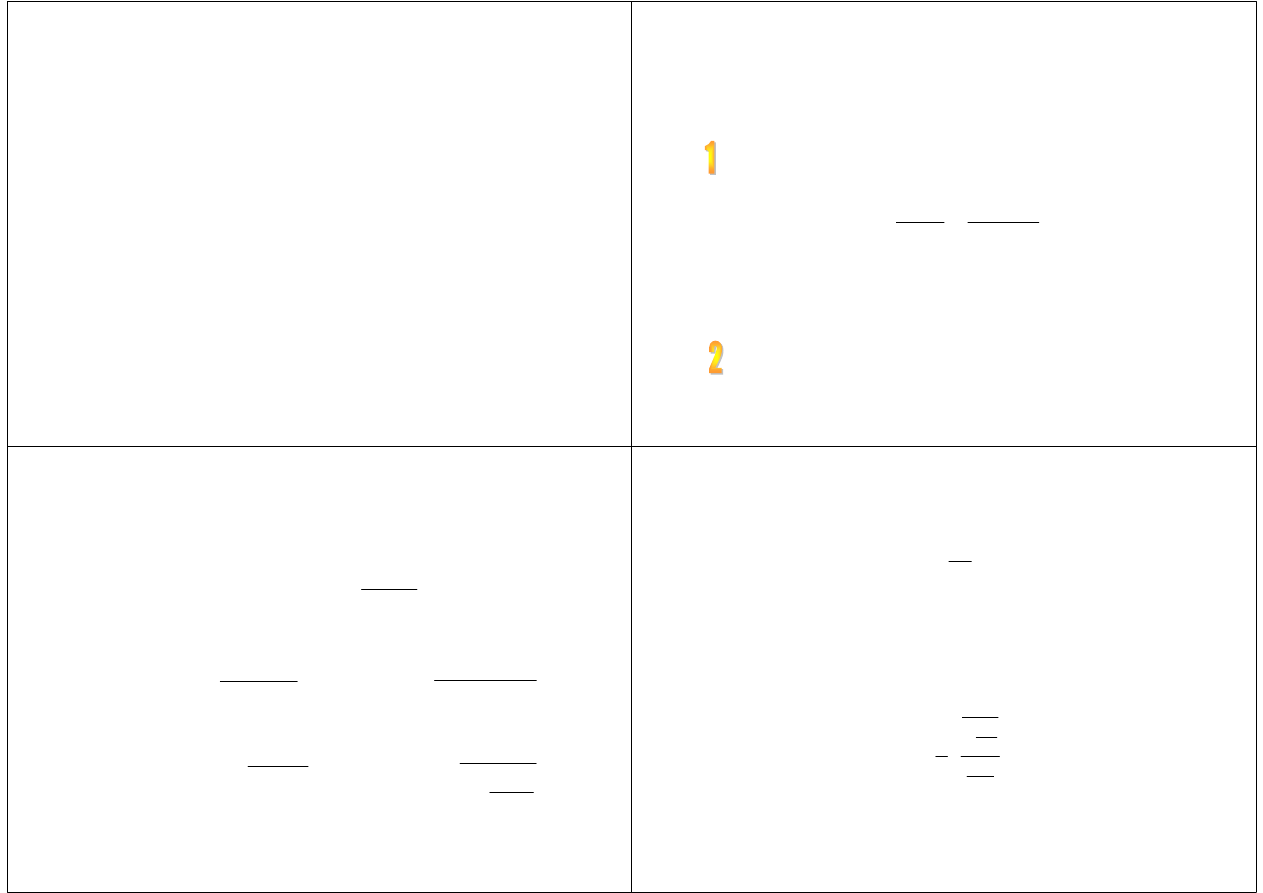
Kryterium ruchu przechylania
Do oceny właściwości pilotażowych w ruchu przechylania
stosuje się dwa wskaźniki:
stałą czasową inercji T
R
, opisując właściwości samolotu
w ruchu przechylania transmitancją członu dynamicznego
I rzędu w postaci:
gdzie:
p(t) – prędkość kątowa przechylania,
δ
L
(t) – kąt wychylenia lotek.
czas przechylania T
ϕ
o określony kąt
ϕ po wychyleniu lotek
o kąt
δ
L
1
s
T
k
)
s
(
)
s
(
p
)
s
(
G
R
R
L
R
+
⋅
=
=
δ
Kryterium ruchu przechylania
Analiza bazuje na liniowym równaniu różniczkowym:
(
)
t
L
p
a
a
p
e
L
L
t
−
−
=
Φ
1
)
(
δ
δ
&
gdzie:
xx
l
I
C
b
S
q
L
a
a
δ
δ
=
V
I
C
b
S
q
L
xx
l
p
p
2
2
2
=
podczas gdy:
a
l
l
C
C
a
δ
δ
∂
∂
=
V
b
p
C
C
l
l
p
∂
∂
=
Kryterium ruchu przechylania
Właściwości przechylania definiujemy jako:
o
Stała czasowa przechylania
p
r
L
T
1
−
=
. to czas potrzebny do uzyskania:
(
)
ss
ss
e
Φ
=
Φ
−
−
&
&
63
.
0
1
1
gdzie:
ss
Φ& jest ustaloną wartością prędkości kątowej przechylania
o
Sterowność przechylania:
∂
∂
∂
∂
−
=
a
l
l
C
V
b
p
C
V
b
T
δ
3
30
czas przechylenia od 0
o
do kąta o wartości 30
o
po wychyleniu lotek o kąt 10
o
.
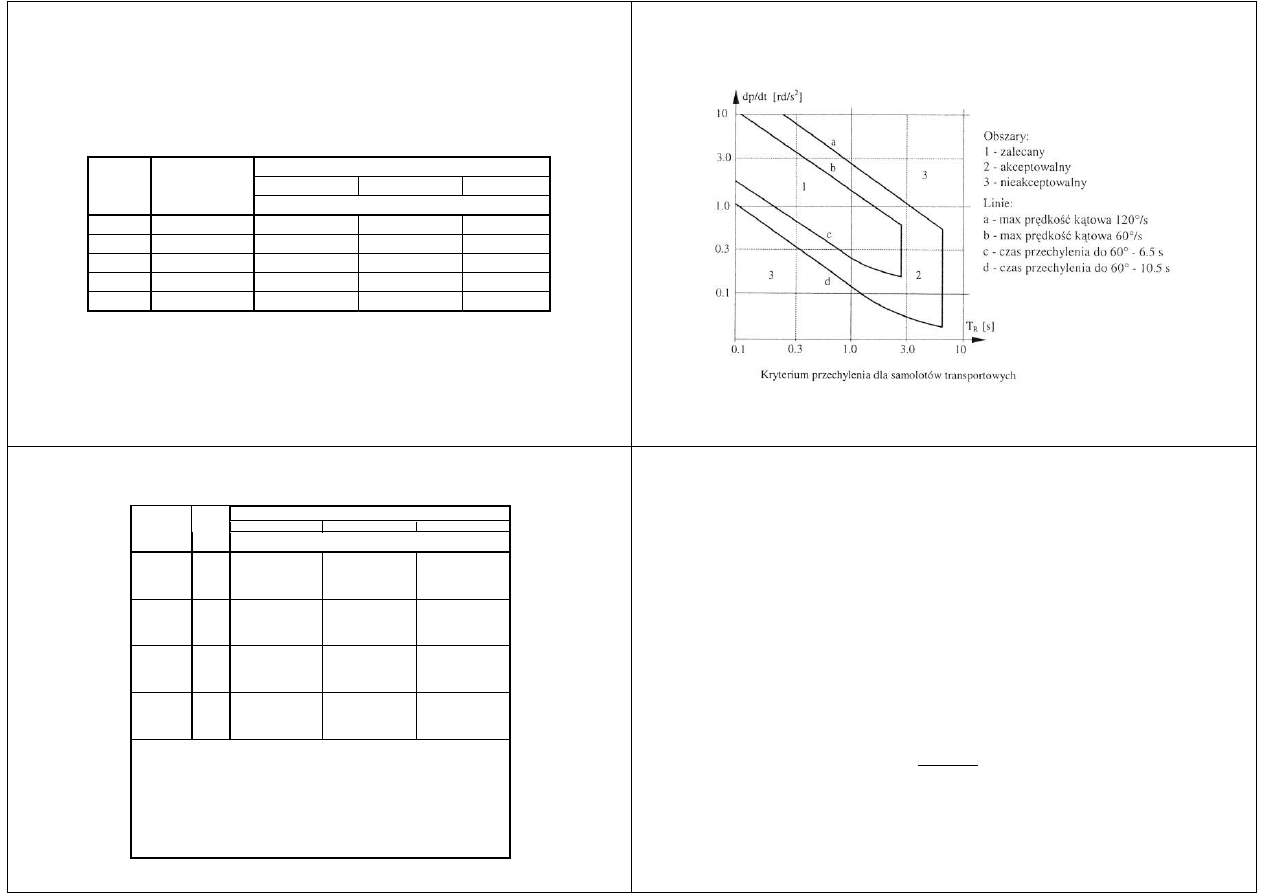
Kryterium ruchu przechylania
Stałe czasowe ruchu przechylania
Poziomy akceptowalności
1
2
3
Faza lotu Klasa samolotu
największa dopuszczalna stalą czasowa T
R
[s]
A
I, IV
1.0
1.4
-
A
II, III
1.4
3.0
-
B
wszystkie
1.4
3.0
10
C
I, IV
1.0
1.4
-
C
II, III
1.4
3.0
Kryterium ruchu przechylania
Sterowność ruchu przechylania
Poziom akceptowalności
1
2
3
Klasa
samolotu
Faza
lotu
(
ϕ-T) - kąt przechylenia ϕ[°] osiągnięty w czasie T [s]
I
A
B
C
60° w 1.3 s
60° w 1.7 s
30° w 1.3 s
60° w 1.7 s
60° w 2.5 s
30° w 1.8 s
60° w 2.6 s
60° w 3.4 s
30° w 2.6 s
II
A
B
C
45° w 1.4 s
45° w 1.9 s
30° w 2.5 s
45° w 1.9 s
45° w 2.8 s
30° w 3.5 s
45° w 2.8 s
45° w 3.0 s
30° w 5.0 s
III
A
B
C
30° w 1.5 s
30° w 2.0 s
30° w 3.0 s
30° w 2.0 s
30° w 3.0 s
30° w 4.0 s
30° w 3.0 s
30° w 4.0 s
30° w 6.0 s
IV
A
B
C
90° w 1.3 s
60° w 1.7 s
30° w 1.0 s
90° w 1.7 s
60° w 2.5 s
30° w 1.3 s
90° w 2.6 s
60° w 3.4 s
30° w 2.0 s
Uwagi:
1. W samolocie klasy IV przy poziomie 1 organ sterowania sterem
kierunku powinien być oswobodzony w czasie próby.
2. W samolotach pozostałych klas i przy pozostałych poziomach można
użyć steru kierunku w celu zredukowania kąta ślizgu, jeśli powoduje
on tendencję do zmniejszania kąta przechylenia. Niedopuszczalne jest
takie użycie steru kierunku, które wywołuje ślizg powiększający
prędkość kątową przechylania.
Kryterium stateczności spiralnej
Ruch spiralny samolotu ma zazwyczaj charakter
aperiodyczny. Na podstawie zgromadzonych
doświadczeń dopuszcza się niestateczność spiralną
samolotu, lecz wymaga się odpowiednio długiego czasu
podwojenia początkowej wartości kąta przechylenia.
Definiuje się również stałą czasową związaną z czasem
podwojenia przechylenia wzorem:
2
ln
2
T
T
S
=
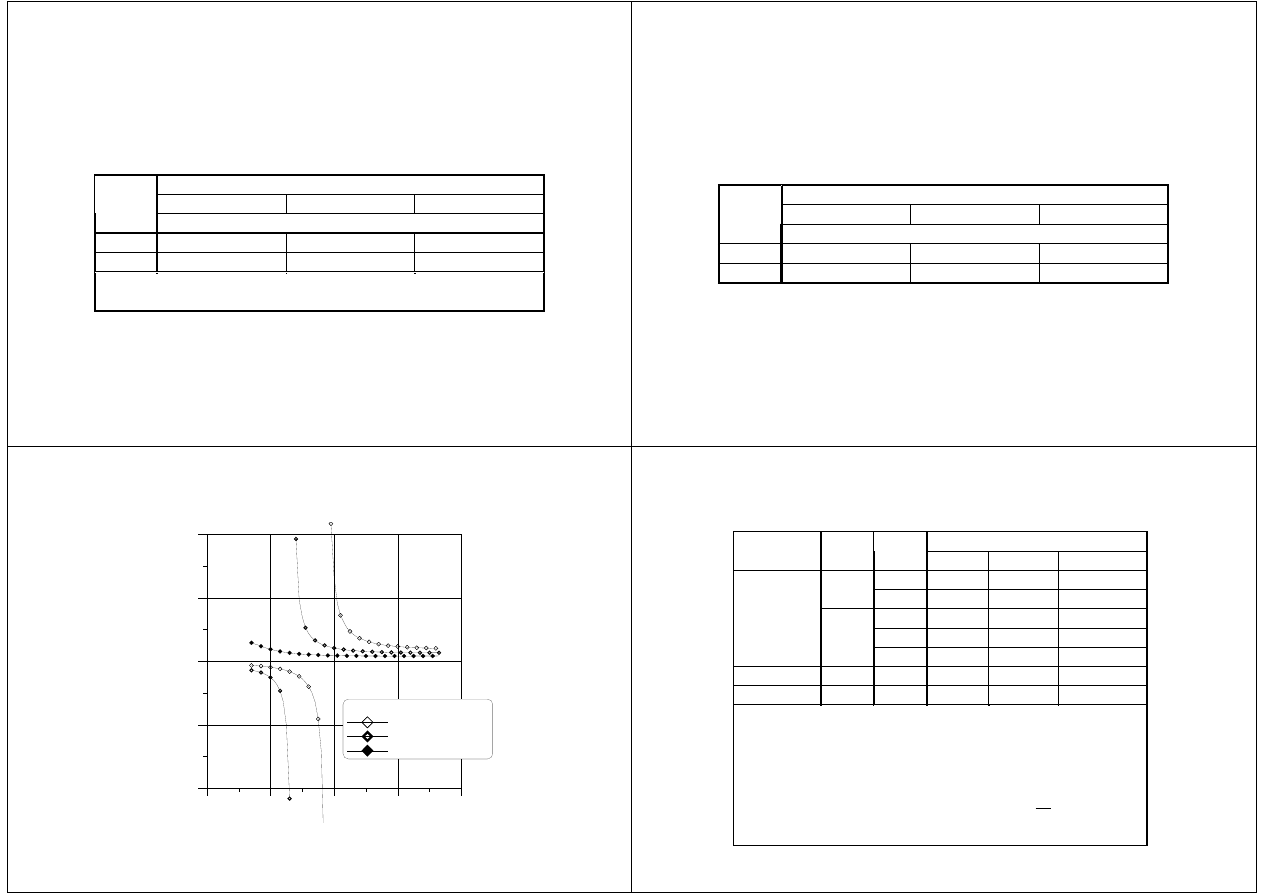
Kryterium stateczności spiralnej
Stateczność spiralna
Najkrótszy dopuszczalny czas podwojenia kąta przechylenia
Poziomy akceptowalności
1
2
3
Faza lotu
czas podwojenia T
2
[s]
A i C
12
8
5
B
20
8
5
Uwagi: Pomiar czasu podwojenia kąta przechylenia wykonuje się z
oswobodzonymi sterami, po zaburzeniu kąta przechylenia do 20°.
Kryterium stateczności spiralnej
Stateczność spiralna – stała czasowa T
S
Poziomy akceptowalności
1
2
3
Faza lotu
stała czasowa T
S
[s]
A i C
17.3
11.5
7.2
B
28.9
11.5
7.2
Kryterium stateczności spiralnej
Przykład obliczeń – Spirala – czas stłumienia wychylenia do połowy
w funkcji prędkości i położenia środka ciężkości
20
40
60
80
100
V [m/s]
-800
-400
0
400
800
T
1/2
[sek]
T
1/2
=f(V,Xc);
T
1/2
=f(V,Xc=26% SCA);
T
1/2
=f(V,Xc=35% SCA);
T
1/2
=f(V,Xc=45% SCA);
Kryterium oscylacji holendrowania
Minimalne parametry holendrowania
Parametry holendrowania
Poziom
akceptowalności
Faza
lotu
Klasa
samolotu
ω
d
ζ
d
ζ
d
ω
d
=ξ
I, IV
1.0
0.19
0.35
A
II, III
0.4
0.19
0.35
B
wszystkie
0.4
0.08
0.15
I, IIp, IV
1.0
0.08
0.15
1
C
IIa, III
0.4
0.08
0.15
2
wszystkie wszystkie
0.4
0.02
0.05
3
wszystkie wszystkie
0.4
0.02
Uwagi:
1. IIa - samolot w konfiguracji do lądowania.
2.
IIp
- samolot w konfiguracji przelotowej.
3. Częstość oscylacji ω
H
[rd/s] oraz bezwymiarowy współczynnik tłumienia
ζ
H
wyznacza się z zależności:
d
H
ω
ω
≤
;
≥
H
d
H
ω
ξ
ζ
ζ
,
max
Ponadto dla samolotów kategorii III powinien być spełniony warunek
ζ
H
< 0.7.
Kryterium oscylacji holendrowania
• ponadto wg przepisów FAR/JAR 23/25
oscylacje typu holendrowanie musza
być tłumione do 1/10 amplitudy w ciągu
minimum 7 cykli
• daje to następujące kryterium liczbowe
0523
.
0
≥
−
η
ξ
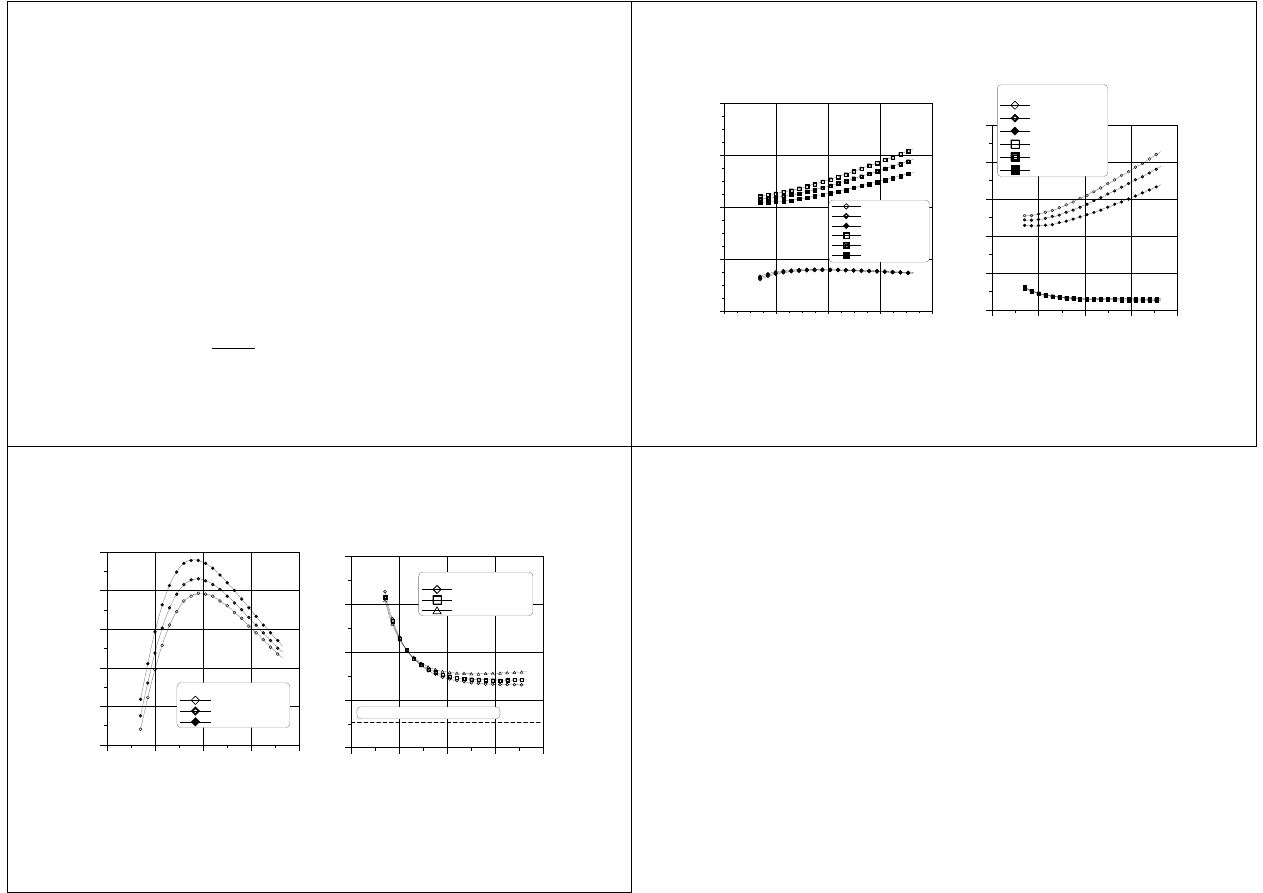
Kryterium oscylacji holendrowania
Przykłady obliczeń charakterystyk holendrowania
(w funkcji prędkości lotu i wyważenia)
20
40
60
80
100
V [m/s]
-1
0
1
2
3
ξ=f(V,Xc=26% SCA);
ξ=f(V,Xc=35% SCA);
ξ=f(V,Xc=45% SCA);
η=f(V,Xc=26% SCA);
η=f(V,Xc=35% SCA);
η=f(V,Xc=45% SCA);
η
ξ
ξ,η=f(V,Xc)
(
λ=ξ+/−iη
gdzie
: i
=
√
___
-1
)
20
40
60
80
100
V [m/s]
0
0.5
1
1.5
2
2.5
w
s
p
ó
łc
z
y
n
n
ik
t
łu
m
ie
n
ia
ζ
d
n
ie
tł
u
m
io
n
a
c
z
ę
s
to
ś
ć
ω
n
d
ω
nd,ζd=f(V,Xc); α
ZH
=0 [deg];
ω
nd=f(V,Xc=26% SCA);
ω
nd=f(V,Xc=35% SCA);
ω
nd=f(V,Xc=45% SCA);
ζ
d=f(V,Xc=26% SCA);
ζ
d=f(V,Xc=35% SCA);
ζ
d=f(V,Xc=45% SCA);
ω
nd
ζ
d
ζ
d
=ξ/sqrt(ξ
2
+η
2
)
ω
nd
=sqrt(
ξ
2
+η
2
)
Kryterium oscylacji holendrowania
Przykłady obliczeń charakterystyk holendrowania
(w funkcji prędkości lotu i wyważenia)
20
40
60
80
100
V [m/s]
1.6
2
2.4
2.8
3.2
3.6
T
1/2
[sek]
T
1/2
=f(V,Xc);
T
1/2
=f(V,Xc=26% SCA);
T
1/2
=f(V,Xc=35% SCA);
T
1/2
=f(V,Xc=45% SCA);
20
40
60
80
100
V [m/s]
0
0.1
0.2
0.3
0.4
−ξ/η
−ξ/η=f(V,Xc); α
ZH
=0 [deg];
-
ξ/η=f(V,Xc=26% SCA);
-
ξ/η=f(V,Xc=35% SCA);
-
ξ/η=f(V,Xc=45% SCA);
−ξ/η=0,0523 warunek graniczny wg JAR-23
Wyszukiwarka
Podobne podstrony:
Kryteria oceny własności lotnych
dodatek+matematyczny+%28w%b3asno%9cci+wariancji+oraz+kryteria+oceny+estymator%f3w%29
kryteria oceny podręczników artykuł
Kryteria oceny zapisu KTG
Kryteria oceny w nauczaniu zintegrowanym klasa pierwsza(1)
Budowa i zasada działania układu pneumatycznego z?S oraz kryteria oceny
Kryteria oceny zajęć dydaktycznych, Materiały
Kryteria oceny rozprawki
Kryteria oceny dla właściwego doboru systemowych deskowań stropowych
KOŚCIELSKA M Kliniczne kryteria oceny emocji, Pedagogika specjalna, Kościelska M
Kryteria oceny projektow w rama Nieznany
Kryteria oceny testów ortograficznych i dyktand
Kryteria oceny prac stylistycznych
Kryteria oceny wniosków 4.2 PO IG 2010, Fundusze Unijne
kryteria oceny gamy
NAJG6, KRYTERIA OCENY JAKOSCI EKSPERYMENTU
WYKŁAD 5d Kryteria oceny przekazu o zdrowiu THCU
więcej podobnych podstron