3U]\NáDG%HOND]HVNUDWRZDQLHP
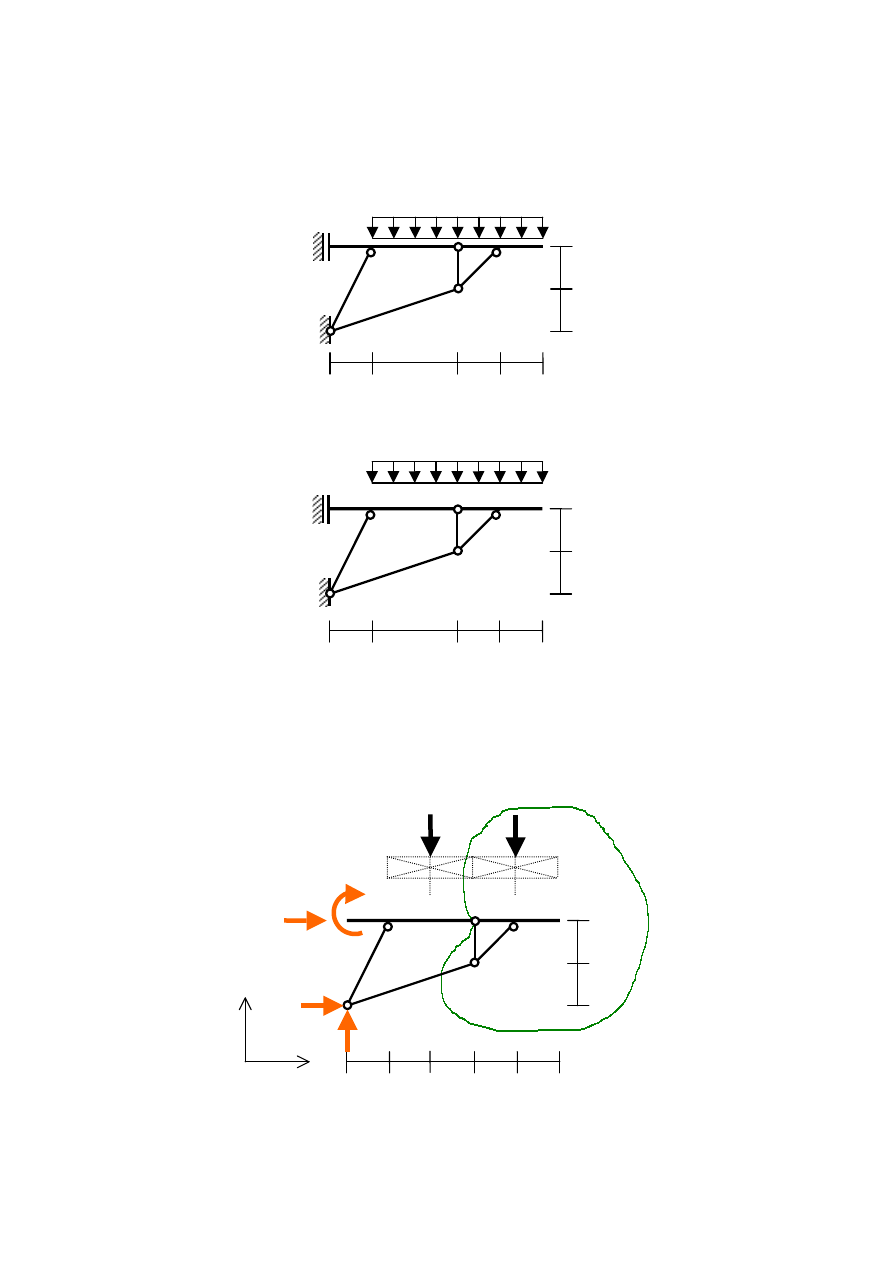
3ROHFHQLH Z\]QDF]\ü UHDNFMH SRGSRURZH GOD SRQL*V]HM EHONL ]H VNUDWRZDQLHP REFL*RQHM
REFL*HQLHPFLJá\PRVWDá\PQDW*HQLX
q.
Przyjmujemy oznaczenia podpór: A i B
1DWRPLDVW SRáF]HQLD SU]HJXERZH R]QDF]DP\
cyframi: 1, 2, 3 i 4.
5R]ZL]DQLH ]DGDQLD UR]SRF]\QDP\ RG XZROQLHQLD XNáDGX RG ZL]yZ ]DVWSXMF SRGSRU\
UHDNFMDPL*yUQDSRGSRUDR]QDF]RQDOLWHU
A
MHVWSRGSRUWHOHVNRSRZ=DWHPZSXQNFLH
A
G]LDáDUHDNFMDSR]LRPD
R
A
SURVWRSDGáDGRNLHUXQNXPR*OLZHJRSU]HVXZXRUD]PRPHQW
M
A
.
'ROQD SRGSRUD R]QDF]RQD OLWHU
B
MHVW SRGSRU SU]HJXERZ QLHSU]HVXZQ : SXQNFLH
B
Z\VWSXMGZLHQLH]DOH*QHRGVLHELHVNáDGRZHUHDNFMLSLRQRZD
V
B
i pozioma H
B
2EFL*HQLH
FLJáHRVWDá\PQDW*HQLX
q
]DVWSXMHP\GZLHPDZ\SDGNRZ\PL
W
1
= W
2
= q
Â
l = 2 ql.
7U]\UyZQDQLDUyZQRZDJL]DSLVDQHGODFDáHJRXNáDGXQLHZ\VWDUF]GRZ\]QDF]HQLDZDUWRFL
czterech niewiadomych: M
A
, R
A
, V
B
i H
B
-HG\QLHUHDNFM
V
B
PR*HP\Z\]QDF]\ü]UyZQDQLD
l
l
l
2 l
q
l
l
l
l
l
2 l
q
l
l
A
B
1
2
3
4
B
I
4
W
2
l
l
l
l
l
l
l
A
1
2
3
M
A
H
B
R
A
V
B
x
y
W
1
2
U]XWyZVLáQDRSLRQRZGODFDáHJRXNáDGX
0
=
∑
i
iy
P
: V
B
í
q
Â
l = 0
⇒
V
B
= 4 ql
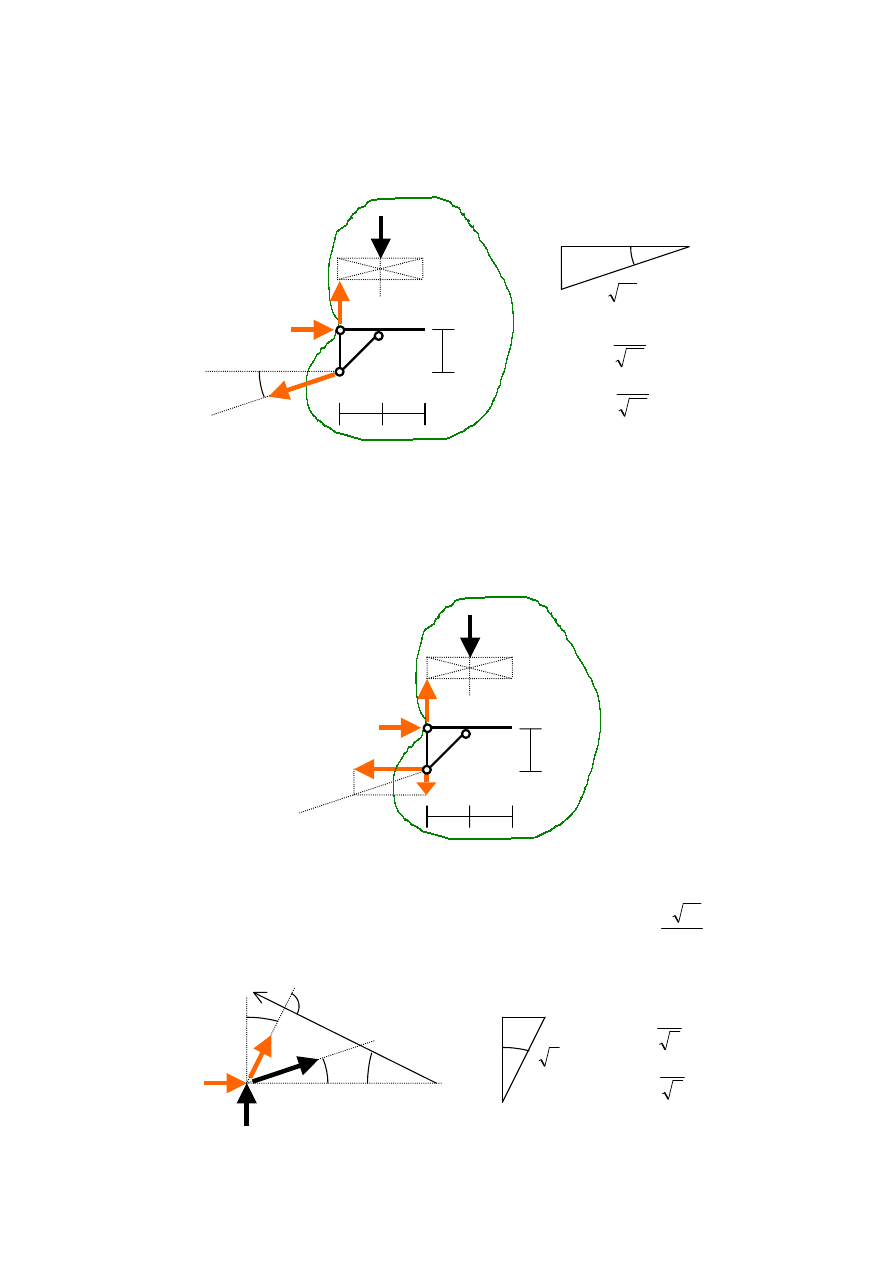
1DVWSQHUyZQDQLHUyZQRZDJL]DSLV]HP\GOD
I
F]FLXNáDGX
=UyZQDQLDPRPHQWyZZ]JOGHPSXQNWX
2
GODF]FL
I
XNáDGXZ\]QDF]\P\ZDUWRüVLá\
S
1
G]LDáDMFHM Z SUFLH
B
í
4
0RPHQW\ RGG]LDá\ZD
V
2
i H
2
Z]JOGHP SXQNWX
2
V UyZQH
]HUX JG\* OLQLH G]LDáDQLD W\FK VLá SU]HFKRG] SU]H] SXQNW
2
=DSLVXMF UyZQDQLH PRPHQWyZ
Z]JOGHPSXQNWX
2
GODF]FL
I
XNáDGXVNRU]\VWDP\]WZLHUG]HQLD9DULJQRQD:W\PFHOX
]DVWSXMHP\VLá
S
1
MHMVNáDGRZ\PLSLRQRZLSR]LRP
5yZQDQLHPRPHQWyZZ]JOGHPSXQNWX
2
GODF]FL
I
XNáDGXPDSRVWDü
∑
=
i
I
i2
M
0 :
í
S
1
ÂFRV.
Â
l
í
W
2
Â
l = 0
⇒
S
1
=
í
3
10
2
ql
.ROHMQHUyZQDQLH]DSLV]HP\GODZ]áDSRGSRURZHJR
B.
B
4
2
3
H
2
V
2
S
1
ÂVLQ.
I
l
l
l
W
2
S
1
ÂFRV.
sin
.
=
10
1
cos
.
=
10
3
4
B
I
l
l
l
2
3
H
2
V
2
W
2
S
1
l
3 l
.
10 l
.
V
B
H
B
.
S
1
S
2
90
o
sin
=
5
1
cos
=
5
2
2l
l
5 l
3
3U]\MPXMHP\ R SURVWRSDGá GR OLQLL G]LDáDQLD VLá\
S
2
Z\VWSXMFHM Z SUFLH
B
í :
UyZQDQLXU]XWyZVLáQDW R GOD Z]áD SRGSRURZHJR
B
MHG\Q QLHZLDGRP EG]LH VNáDGRZD
pozioma H
B
: FHOX XSURV]F]HQLD REOLF]HQLD U]XWX VLá\
S
1
QD R ]DVWSXMHP\ VLá
S
1
jej
VNáDGRZ\PLSLRQRZLSR]LRP
=DSLVXMHP\UyZQDQLHU]XWyZVLáQDRGODZ]áDSRGSRURZHJR
B.
0
=
∑
i
B
i
P
: V
B
ÂVLQ
í
H
B
ÂFRV
í
S
1
ÂFRV.
ÂFRV
+ S
1
ÂVLQ.
ÂVLQ
= 0
⇒
H
B
=
3
11
ql
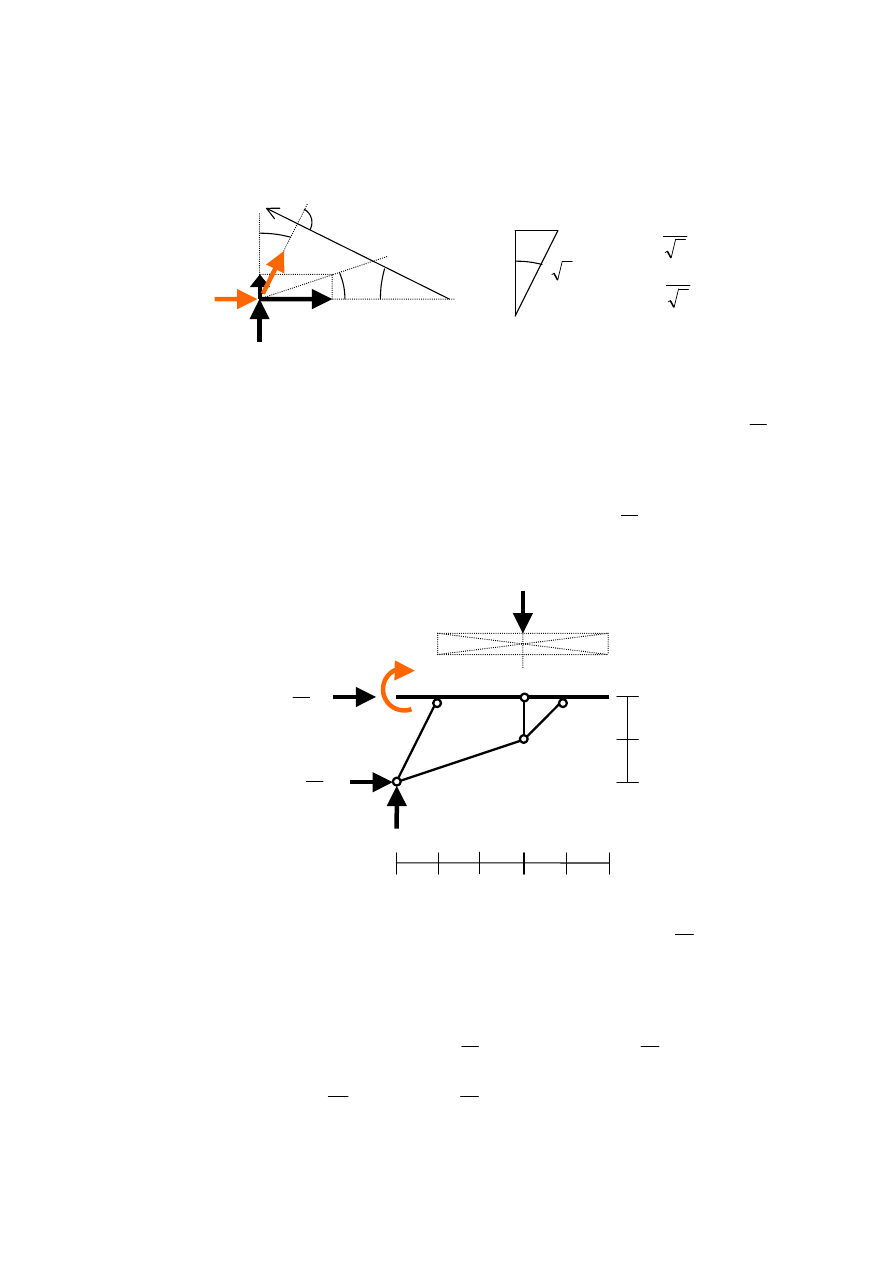
3R]RVWDáH UHDNFMH Z\]QDF]\P\ ] UyZQD UyZQRZDJL ]DSLVDQ\FK GOD FDáHJR XNáDGX 5HDNFM
SR]LRP
R
A
REOLF]\P\NRU]\VWDMF]UyZQDQLDU]XWyZVLáQDRSR]LRP
0
=
∑
i
ix
P
: R
A
+ H
B
= 0
⇒
R
A
=
í
3
11
ql
Moment podporowy M
A
Z PLHMVFX SRGSRU\ WHOHVNRSRZHM PR*HP\ Z\]QDF]\ü ] UyZQDQLD
PRPHQWyZGODFDáHJRXNáDGXZ]JOGHPSXQNWX
B.
5yZQDQLHWRPDSRVWDü
∑
=
i
iB
M
0 :
í
R
A
Â
l
í
M
A
í
W
Â
l = 0
⇒
M
A
=
í
3
14
ql
2
6SUDZG]HQLH SRSUDZQRFL SU]HSURZDG]RQ\FK REOLF]H Z\NRQDP\ ]DSLVXMF UyZQDQLH
UyZQRZDJL ] NWyUHJR ZF]HQLHM QLH NRU]\VWDOLP\ 0R*H WR E\ü QD SU]\NáDG UyZQDQLH
PRPHQWyZGODFDáHJRXNáDGXZ]JOGHPSXQNWX
C.
0
=
∑
i
iC
M
: H
B
Â
l
í
V
B
Â
l
í
M
A
+ W
Â
l =
3
11
ql
Â
l
í
ql
Â
l
í
(
í
3
14
ql
2
)
+ 4 ql
Â
l =
=
3
22
ql
2
í
ql
2
+
3
14
ql
2
+ 8 ql
2
= 0
5yZQDQLHVSHáQLRQHMHVWWR*VDPRFLRZR
S
2
S
1
ÂFRV.
S
1
ÂVLQ.
V
B
H
B
.
90
o
sin
=
5
1
cos
=
5
2
2l
l
5 l
4
W = W
1
+ W
2
= 4 ql
l
l
l
l
l
l
l
A
1
2
3
M
A
H
B
=
3
11
ql
R
A
=
í
3
11
ql
V
B
= 4 ql
B
C
Wyszukiwarka
Podobne podstrony:
Belka ze skratowaniem 3
Mechanika Techniczna I Skrypt 4 2 6 Belka ze skratowaniem
27 Wyprowadź wzór ze wzoru oraz z relacji Gibbs’a Duhem’a
27, Dlaczego mówimy że poezja Kochanowskiego jest uniwersalna
eco sciaga, 27. Podstawowe operacja bankowe, Prawo popytu - wraz ze wzrostem ceny danego dobra, zmal
Pedersen Bente Raija ze śnieżnej krainy 27 Caryca
ściaga. nie marudzić że zła bo lepiej nie umiem, 27
Bente Pedersen Raija ze Śnieżnej Krainy 27 Caryca
(odc 27) kurczaki pieczone z cytrynami z pieczonymi ziemniakami ze wspaniałym sosem
D19250416 Rozporządzenie Rady Ministrów z dnia 27 maja 1925 r o wydzieleniu miasta Gniezna ze związ
Ustawa z dnia 27 08 2004 r o świadczeniach opieki zdrowotnej finansowanych ze środków publicznych do
GUNTHER PAPE BYŁEM ŚWIADKIEM JEHOWY (WYDANIE Z 1991 ROKU) [BRAKUJĄCY TEKST ZE STR 26 27 I 30 31)
D19250417 Rozporządzenie Rady Ministrów z dnia 27 maja 1925 r o wydzieleniu miasta Inowrocławia ze
Rozdział 3 USTAWY z dnia 27 sierpnia 2004 r o świadczeniach opieki zdrowotnej finansowanych ze środk
27 Podatek dochodowy od osób fizycznych w zakresie dochodów ze zbycia oraz wynajmu nieruchomości ppt
2012 02 27 Jak pozbyć się wspólnika ze spółki jawnej
więcej podobnych podstron