Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych
Nr 58
Politechniki Wrocławskiej
Nr 58
Studia i Materiały Nr
25
2005
__________
maszyny elektryczne, silniki synchroniczne dwubiegowe,
synchronizacja, obliczenia polowo-obwodowe
Paweł ZALAS
F
∗
F
, Jan ZAWILAK
*
SYNCHRONIZACJA SILNIKÓW SYNCHRONICZNYCH PRZEZ
ZMIANĘ KIERUNKU PRZEPŁYWU PRĄDU WZBUDZENIA
W artykule przedstawiano wyniki obliczeń procesu synchronizacji dwubiegowego silnika syn-
chronicznego z przełączalnymi uzwojeniami twornika i magneśnicy. Wykazano istotną zależność
przebiegu procesu od chwili załączenia napięcia wzbudzenia. Zbadano wpływ sterowania wartością
prądu wzbudzenia podczas synchronizacji na przebieg tego procesu. Obliczenia polowo-obwodowe
wykonano dla wybranego modelu silnika typu GAe 1715/20t. Wyniki obliczeń zamieszczono w po-
staci wykresów czasowych.
1. WSTĘP
Proces synchronizacji stanowi końcową fazę rozruchu silników synchronicznych.
Załączenie napięcia stałego i przepływ prądu w obwodzie wzbudzenia wytwarza mo-
ment dynamiczny, który powoduje wzrost prędkości wirowania aż do prędkości syn-
chronicznej. Chwila rozpoczęcia procesu synchronizacji ma istotny wpływ na jego
przebieg. Niewłaściwa chwila włączenia napięcia wzbudzenia może powodować wy-
stępowanie zmiennego momentu elektromagnetycznego o znaczącej amplitudzie,
przepięcia w obwodach uzwojenia twornika, a nawet niezsynchronizowanie się silnika
[8].
W celu zwiększenia wartości momentu dynamicznego, a tym samym skuteczności
synchronizacji, stosuje się powszechnie forsowanie prądu wzbudzenia, często o warto-
ści o 50 % większej od prądu znamionowego. Pozwala to na zwiększenie momentu
synchronizującego, lecz powoduje również znaczne przeciążenia układu mechanicz-
nego, co ma niekorzystny wpływ na bezawaryjną eksploatację układu napędowego.
Ma to szczególne znaczenie dla silników dużej mocy stosowanych np. do napędów
∗
Politechnika Wrocławska, Instytut Maszyn, Napędów i Pomiarów Elektrycznych, 50-372 Wrocław,
ul. Smoluchowskiego 19,
HU
paweł.zalas@pwr.wroc.pl
UH
,
HU
jan.zawilak@pwr.wroc.pl
UH
.

248
wentylatorów głównego przewietrzania kopalni głębinowych. Proces rozruchu tych
napędów, ze względu na dużą wartość momentu obciążenia i momentu bezwładności,
stanowi najistotniejsze zagadnienie wpływające na ich eksploatację.
Tabela 1. Dane znamionowe dwubiegowego silnika synchronicznego typu GAe 1716/20t
Table 1. Rating of two-speed synchronous motor type GAe 1716/20t
Moc znamionowa
kW
2600
1200
Napięcie stojana
V
6000
6000
Prąd stojana
A
292
186
Napięcie wzbudzenia
V
100
78
Prąd wzbudzenia
A
337
260
Prędkość obrotowa
obr/min
375
300
Współczynnik mocy
-
0,9 poj.
0,77 ind.
Sprawność % 95,5 81,0
Tabela 2. Nominalne parametry wentylatora typu WPK 5,3
Table. 2. Rated performance parameters for fan type WPK 5,3
Wydajność nominalna
m
3
/
s
366,6/458,3
Sprawność maksymalna
-
0,885
Masa kg
50438
Bezwładność kgm
2
37000
W napędach tych stosowane są obecnie dwubiegowe silniki synchroniczne o ułam-
kowym stosunku prędkości np. 300 i 375 obr/min. Ze względu na koszty silniki dwu-
biegowe buduje się wykorzystując magnetowód i konstrukcję mechaniczną silników
jednobiegowych. Odpowiednio dobrane dwie prędkości obrotowe zapewniają wystar-
czającą regulację wydajności wentylatora [3]. Jednym z przykładów jest dwubiegowy
silnik synchroniczny typu GAe 1716/20t, którego podstawowe parametry zestawiono
w tabeli 1 natomiast parametry napędzanego wentylatora typu WPK 5,3 w tabeli 2.
Proces synchronizacji silnika dwubiegowego na większej prędkości obrotowej prze-
biega podobnie jak w silniku jednobiegowym. Istotne różnice pojawiają się podczas
synchronizacji na mniejszej prędkości. Powodem tego jest różna liczba biegunów
magnetycznych i mechanicznych wirnika [2, 6]. Celowo wytworzone odkształcenie
pola magnetycznego magneśnicy powoduje, że w danej chwili czasowej poszczególne
bieguny znajdują się w różnych warunkach magnetycznych [1]. Wskutek tego udział

249
poszczególnych biegunów w tworzeniu momentu napędowego nie jest jednakowy.
Powoduje to wzrost elektromechanicznej stałej czasowej układu napędowego. Odpo-
wiedni dobór chwili rozpoczęcia procesu synchronizacji silnika na tej prędkości wi-
rowania pozwala skutecznie wprowadzić silnik w synchronizm. W układach napędo-
wych o dużym momencie bezwładności i momencie obciążenia zwiększanie prądu
wzbudzenia może być niewystarczające do wytworzenia odpowiedniego momentu
synchronizującego i synchronizacji silnika.
Celem niniejszej pracy jest pokazanie możliwości poprawy procesu synchronizacji
silników synchronicznych pracujących w układach napędowych o dużym momencie
bezwładności i obciążenia przez odpowiednie sterowanie wartością prądu wzbudzenia.
2. MODEL OBLICZENIOWY
Analizę procesu synchronizacji przeprowadzono wykorzystując opracowany mo-
del polowo-obwodowy silnika typu GAe 1716/20t opisany w [7]. W części obwodo-
wej modelu przyjęto symetryczny układ napięć zasilających V
A
, V
B
, V
C
, oraz uzwoje-
nie stojana i magneśnicy L
1
, L
2
o zmiennej indukcyjności i stałej rezystancji części
czynnych. Wartości rezystancji oraz indukcyjności połączeń czołowych L
cz
uzwojeń
twornika i magneśnicy przyjęto jako stałe.
TU£S
L1
Lcz
R0
L2
Lcz'
R0'
Va
Vb
Vc
T1
T4
T2
T5
T3
T6
K1
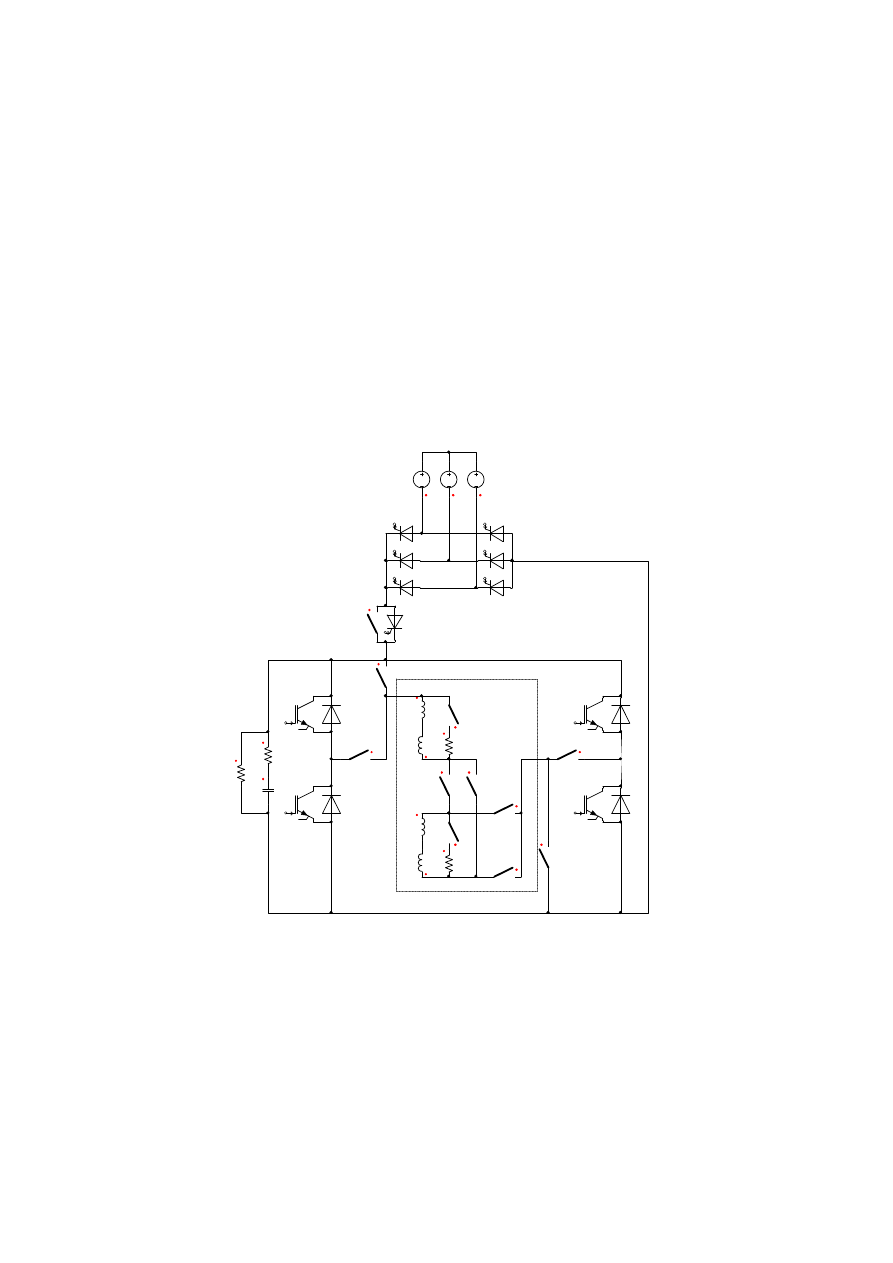
Rys. 1. Schemat części obwodowej modelu: uzwojenie wzbudzenia silnika dwubiegowego
Fig. 1. Circuital part of model: excitation winding of two-speed motor

250
Widoczne na rysunku 1 łączniki umożliwiają przełączanie uzwojeń warunkujące
zmianę liczby biegunów i prędkości obrotowej silnika. Zastosowany tyrystor TUŁS
pozwala na załączenie napięcia stałego do obwodu wzbudzenia w określonej chwili
czasowej. Wartość rezystancji R
0
zwierającej obwód wzbudzenia podczas rozruchu
przyjęto równą 10-cio krotnej wartości rezystancji uzwojenia wzbudzenia. Część po-
lowa modelu uwzględnia częstotliwość i wartość napięcia zasilającego, nieliniowość
elementów obwodu magnetycznego oraz ruch wirnika odwzorowywany za pomocą
ruchomej powierzchni ślizgowej. W modelu uwzględniono klatkę wirnika o zmien-
nych parametrach prętów i stałych wartościach rezystancji i indukcyjności pierścienia
zwierającego.
W celu weryfikacji modelu wykonano pomiary modelu fizycznego badanego silni-
ka oraz odpowiadające im obliczenia. Porównanie wielkości obliczonych i pomierzo-
nych pozwoliło stwierdzić, że opracowany model polowo-obwodowy dwubiegowego
silnika synchronicznego jest poprawny [7, 8].
3. OBLICZENIA PROCESU SYNCHRONIZACJI
Wykorzystując model polowo-obwodowy wykonano obliczenia procesu synchro-
nizacji badanego silnika dwubiegowego. Przyjęto wartości momentu obciążenia z
zakresu od 0,4 do 0,7 momentu znamionowego silnika na mniejszej prędkości wiro-
wania. Uwzględniona w badaniach symulacyjnych zastępcza bezwładność układu
napędowego (silnika z wentylatorem typu WPK 5,3) wynosi J
z
≈ 40 000 kg·m
2
.
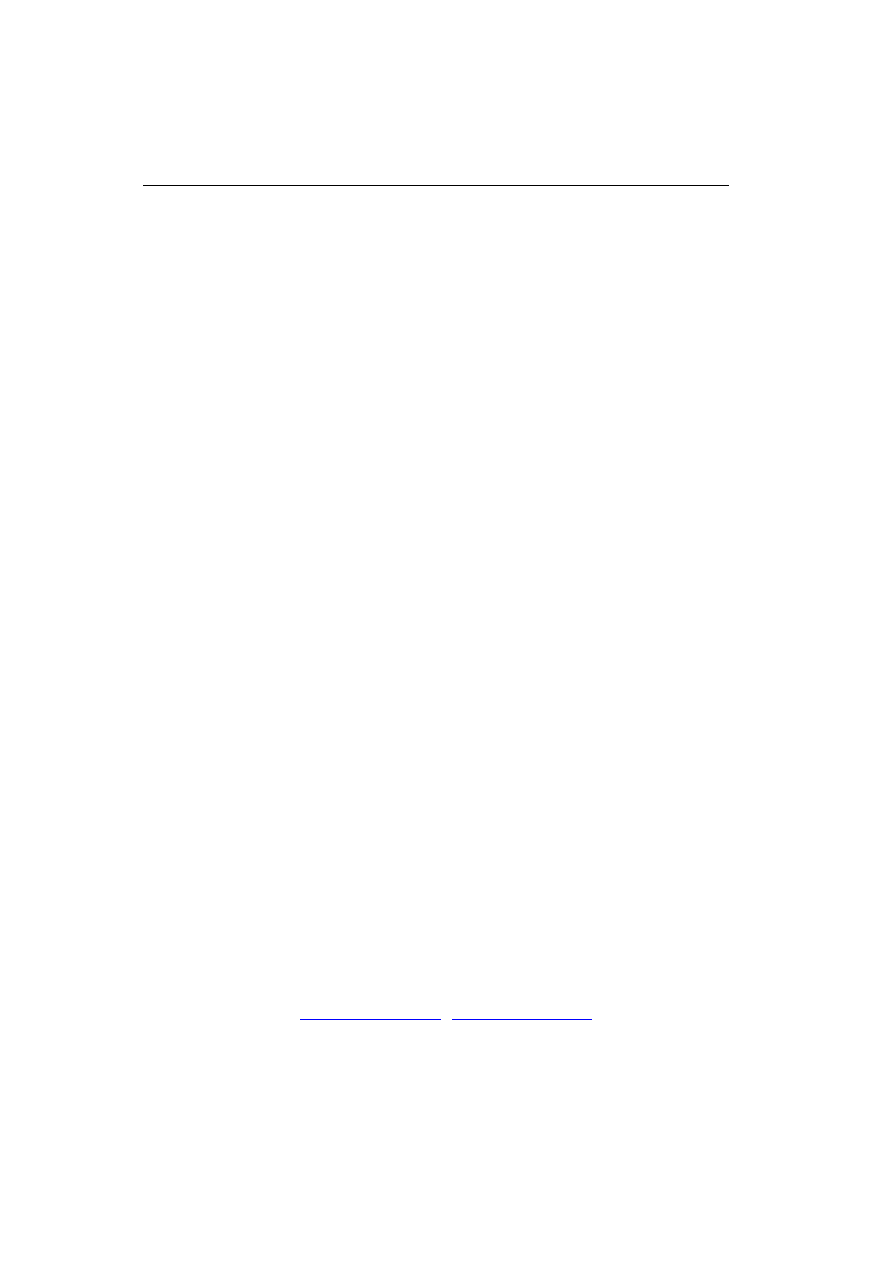
Wykonane obliczenia dla momentu obciążenia 0,55M
n
wykazały, że skuteczny
przebieg synchronizacji może zapewnić załączenie napięcia wzbudzenia gdy wartość
kąta
δ
znajduje się w zakresie od (-90) do (-15) stopni, gdzie:
δ
- jest kątem między
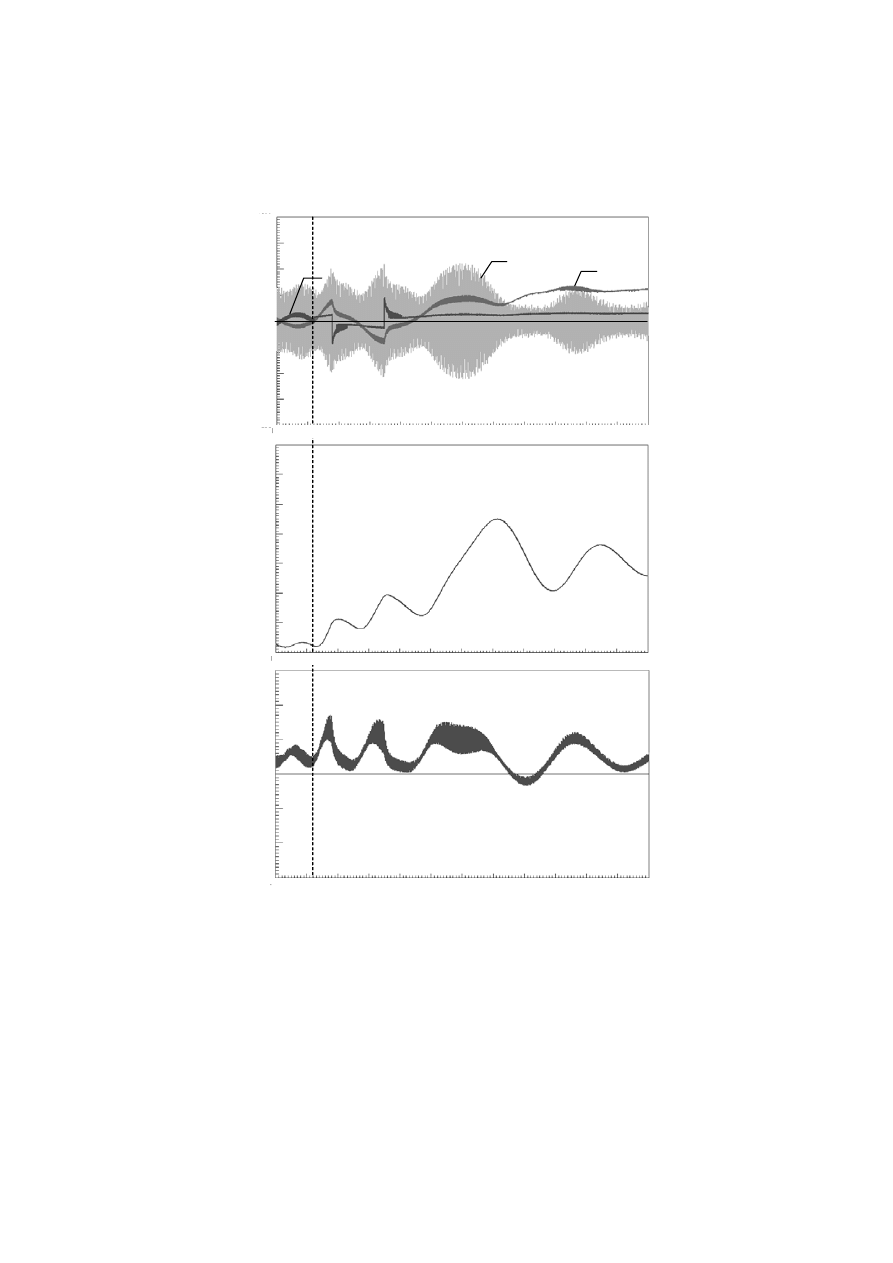
osią przepływu stojana a osią przepływu wirnika. Na rysunku 2 pokazano obliczone
przebiegi prądu fazy A twornika I
s
, prądu wzbudzenia I
w
oraz napięcia U
w
na zaci-
skach uzwojenia wzbudzenia, momentu elektromagnetycznego i prędkości obrotowej
podczas synchronizacji rozpoczętej dla wartości kąta
δ
równej (-45) stopni. Linią
przerywaną zaznaczono chwilę rozpoczęcia procesu synchronizacji silnika. Obliczenia
wykonano dla znamionowej wartości napięcia wzbudzenia. Korzystna chwila inicjacji
procesu zapewniła skuteczną synchronizację silnika podczas pierwszej, po załączeniu
napięcia wzbudzenia, współfazowości pól stojana i wirnika.
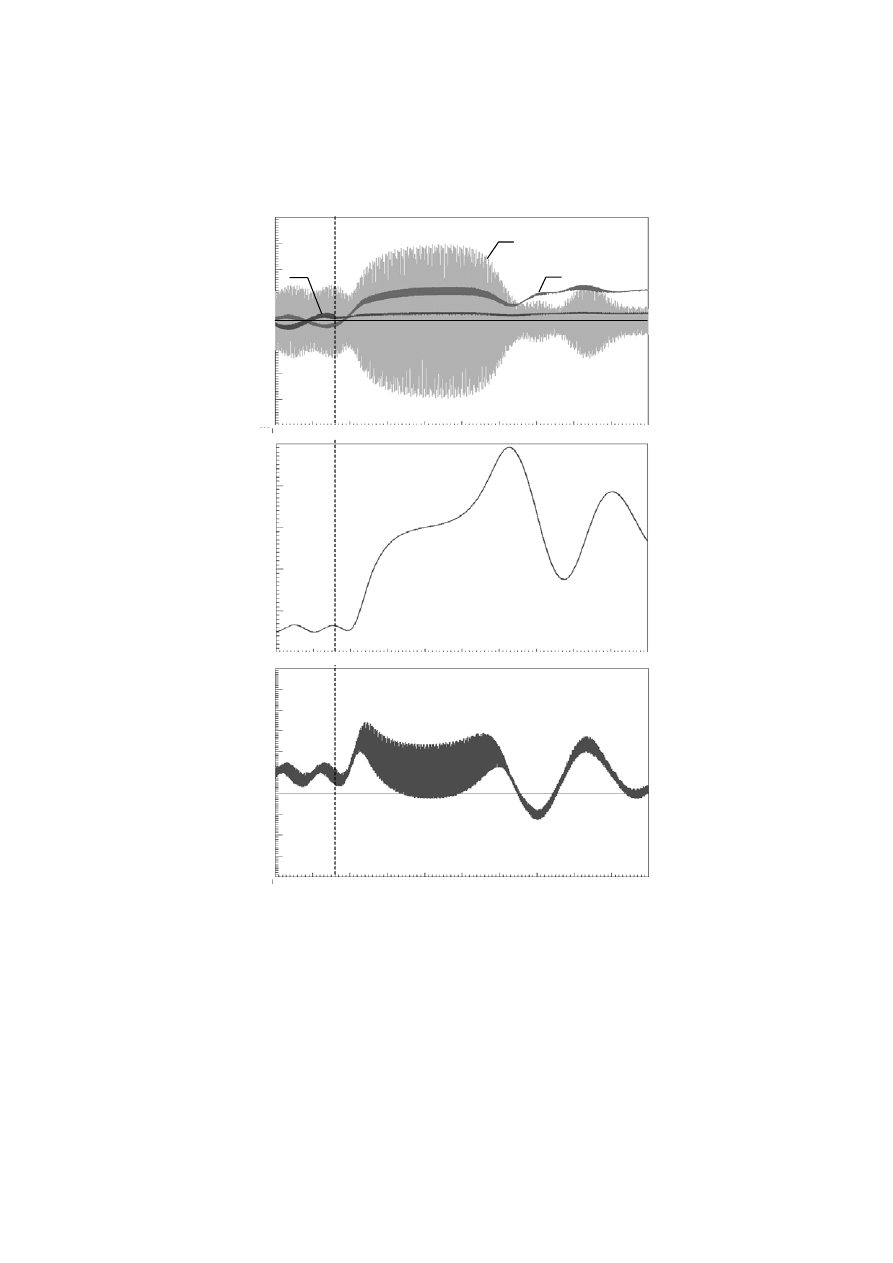
Przyjmując takie same warunki: wartości napięcia wzbudzenia oraz momentu obcią-
żenia silnika, wykonano obliczenia procesu synchronizacji rozpoczętego dla innej chwi-
li czasowej tj. kąta
δ
równego 135 stopni. Wyniki obliczeń pokazano na rysunku 3.
251
t [s]
t [s]
1,6 2,2 2,8 3,4 4,0 4,6 5,2
5,8
6,4 7,0 7,6
b)
c)
a)
U
w
I
s
I
w
1000
750
500
250
0
250
500
750
-1000
M[kNm]
n[obr/min]
304
302
300
298
296
294
150
100
50
0
-50
-100
1,6 2,2 2,8 3,4 4,0 4,6 5,2 5,8 6,4 7,0 7,6
1,6 2,2 2,8 3,4 4,0 4,6 5,2 5,8 6,4 7,0 7,6
t [s]
Rys. 2. Przebieg synchronizacji silnika rozpoczętej dla kąta
δ
= (-45) stopni: a) prądy twornika I
s
, prąd
wzbudzenia I
w
, napięcie na zaciskach uzwojenia wzbudzenia U
w
, b) prędkość obrotowa, c) moment
elektromagnetyczny
Fig. 2. Motor synchronization in the moment when the agle
δ
= (-45) deg: a) armature currents I
s
, excita-
tion current I
w
, voltage on excitation winding terminals U
w
, b) rotational speed, c) electromagnetic torque
252
t [s]
t [s]
1,6 2,2 2,8 3,4 4,0 4,6 5,2
5,8
6,4 7,0 7,6
b)
c)
a)
U
w
I
s
I
w
1000
750
500
250
0
250
500
750
-1000
M[kNm]
n[obr/min]
300
298
296
294
292
150
100
50
0
-50
-100
1,6 2,2 2,8 3,4 4,0 4,6 5,2 5,8 6,4 7,0 7,6
1,6 2,2 2,8 3,4 4,0 4,6 5,2 5,8 6,4 7,0 7,6
t [s]
Rys. 3. Przebieg synchronizacji silnika rozpoczętej dla kąta
δ
=135 stopni: a) prądy twornika I
s
, prąd
wzbudzenia I
w
, napięcie na zaciskach uzwojenia wzbudzenia U
w
, b) prędkość obrotowa, c) moment
elektromagnetyczny
Fig. 3. Motor synchronization in the moment when the agle
δ
=135 deg: a) armature currents I
s
, excitation
current I
w
, voltage on excitation winding terminals U
w
, b) rotational speed, c) electromagnetic torque

253
Jest to przykład kiedy inicjację procesu przyjęto w niekorzystnej chwili czasowej
co spowodowało, że silnik nie osiągnął synchronizacji i ustaliła się praca asynchro-
niczna przy wzbudzonej maszynie.
Obliczenia procesu synchronizacji wykonane dla momentu obciążenia o wartości
większej od 0,55M
n
wykazały, że niezależnie od wyboru chwili rozpoczęcia procesu,
dla znamionowej wartości napięcia wzbudzenia, silnik się nie synchronizuje. W takich
przypadkach stosuje się powszechnie forsowanie prądu wzbudzenia w celu zwiększe-
nia wartości momentu synchronizującego. Obliczenia procesu synchronizacji wyko-
nane dla momentu obciążenia silnika o wartości 0,6M
n
wykazały, że pomimo zasto-
sowania forsowania prądu wzbudzenia 1,5I
wn
proces nie kończy się skuteczną
synchronizacją silnika.
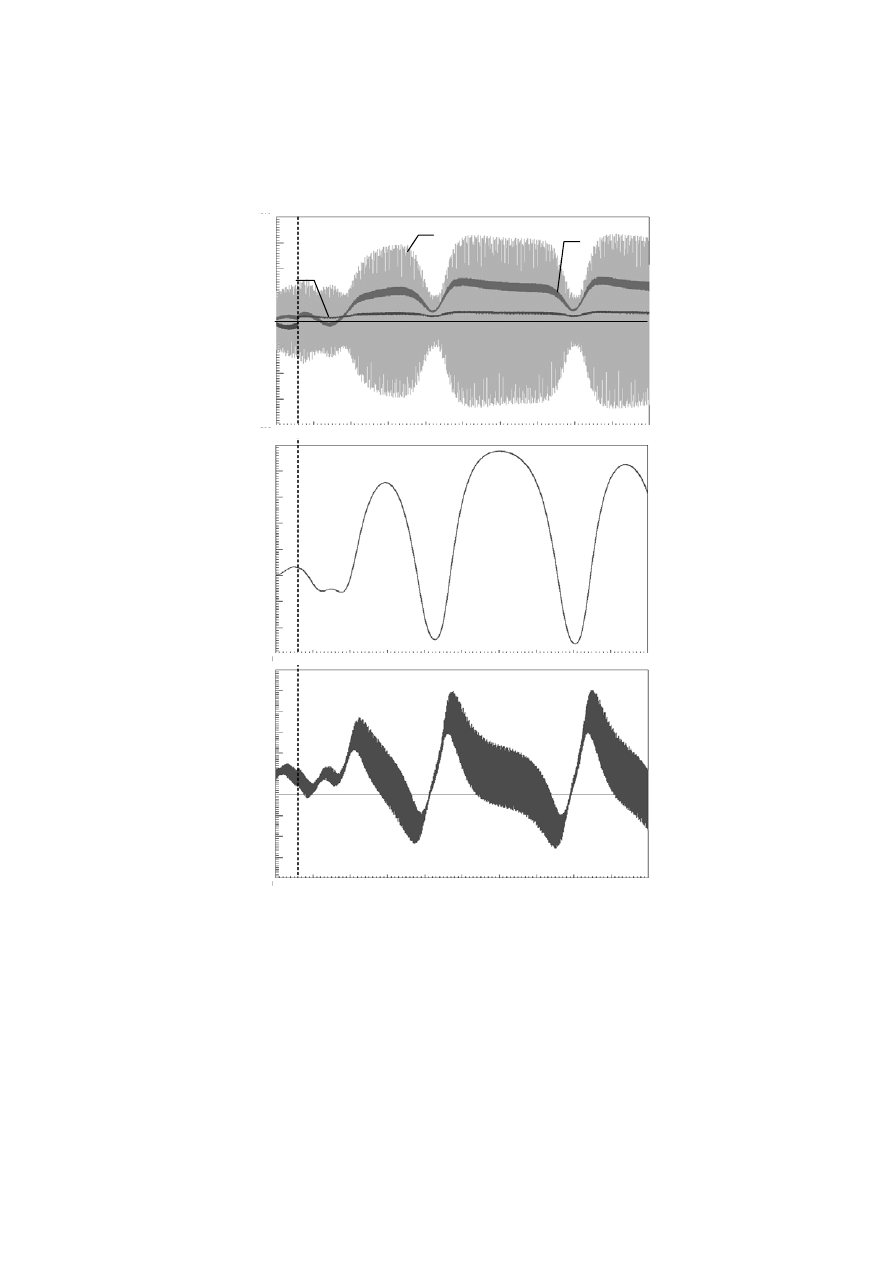
Na rysunku 4 pokazano obliczone przebiegi prądu fazy A twornika I
s
, prądu wzbu-
dzenia I
w
oraz napięcia U
w
na zaciskach uzwojenia wzbudzenia, momentu elektroma-
gnetycznego i prędkości obrotowej podczas synchronizacji rozpoczętej dla kąta
δ
rów-
nego 0 stopni. Pomimo zastosowania forsowania prądu płynącego w uzwojeniu
wzbudzenia synchronizacja jest nieskuteczna. Wymuszona, przez załączenie napięcia
stałego, dodatnia wartość prądu wzbudzenia powoduje, w zakresie ujemnej wartości
kąta
δ
, wytworzenie momentu hamującego. W wyniku jego działania następuje
zmniejszenie prędkości obrotowej silnika. W wyniku dużego poślizgu silnik nie może
osiągnąć prędkości synchronicznej i ustala się praca asynchroniczna przy dużych uda-
rach momentu elektromagnetycznego i dużych wahaniach prędkości obrotowej
(rys.4b,c).
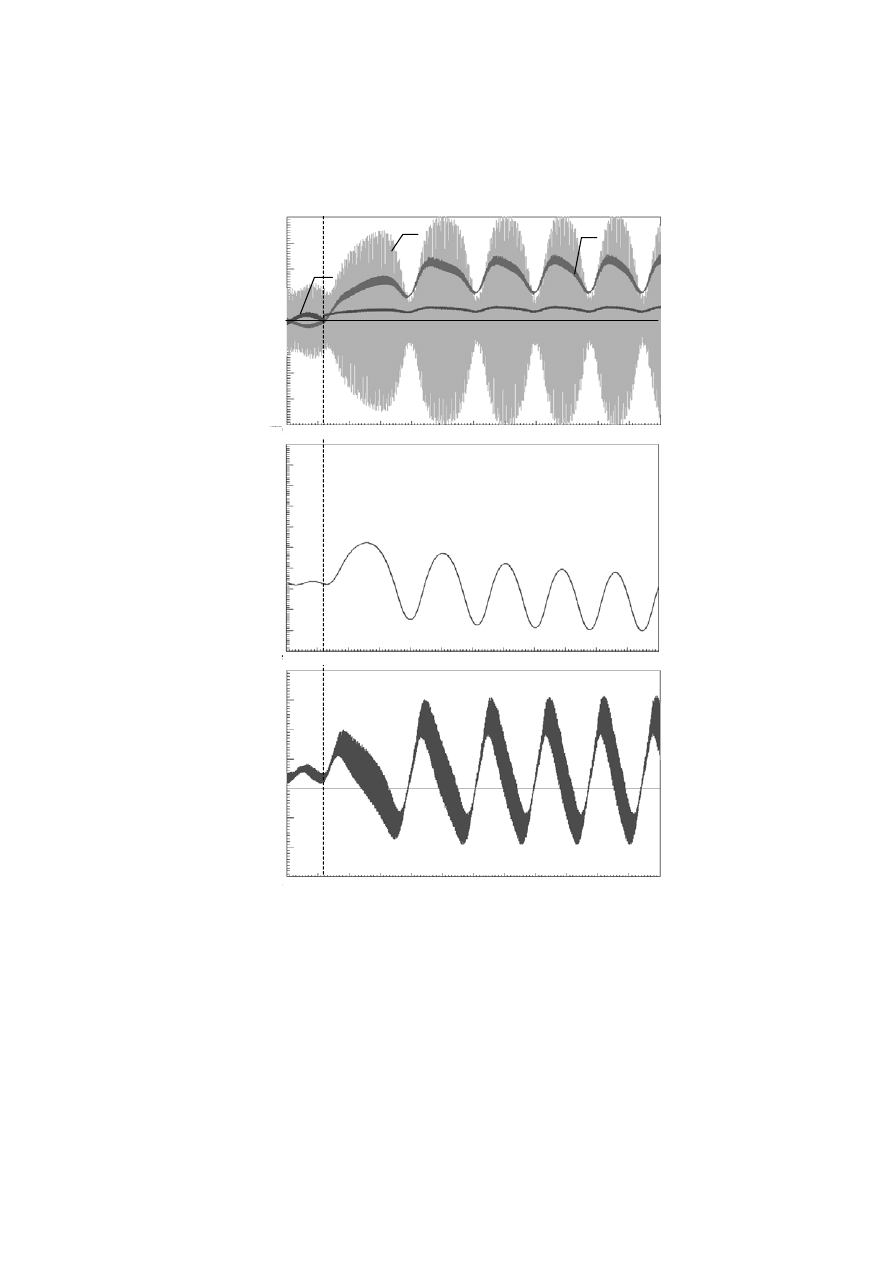
Dla przyjętych warunków obciążenia silnika skuteczną synchronizację zapewnia
forsowanie prądem wzbudzenia o wartości przekraczającej 2,5I
wn
. Na rysunku 5 poka-
zano obliczone przebiegi prądu fazy A twornika I
s
, prądu wzbudzenia I
w
oraz napięcia
U
w
na zaciskach uzwojenia wzbudzenia, momentu elektromagnetycznego i prędkości
obrotowej podczas synchronizacji rozpoczętej dla kąta
δ
równego 0 stopni i prądu
wzbudzenia o wartości 2,5I
wn
. Duża wartość prądu wzbudzenia wywołuje pulsację
momentu elektromagnetycznego o dużej amplitudzie a tym samym duże przeciążenia
układu mechanicznego. Duże oscylacje prędkości (rys.5b) powodują zwiększenie
czasu ustalenia się procesów przejściowych i czasu synchronizacji. Uzyskanie tak
dużej wartości prądu forsującego wymaga również zwiększenia mocy urządzeń zasila-
jących obwód wzbudzenia.
Inną metodą, pozwalającą zwiększyć skuteczność procesu synchronizacji jest za-
stosowanie sterowania wartością prądu wzbudzenia. Celem regulacji prądu jest zmi-
nimalizowanie wartości momentu hamującego wytwarzanego przez silnik w zakresie
ujemnych wartości kąta
δ
od (-180) do 0 stopni oraz uzyskanie możliwie dużej warto-
ści momentu dynamicznego w zakresie dodatnich wartości kąta
δ
od 0 do 180 stopni.
254
t [s]
t [s]
5,5 6,5 7,5 8,5 9,5 10,5 11,5
b)
c)
a)
U
w
I
s
I
w
1000
750
500
250
0
250
500
750
-1000
M[kNm]
n[obr/min]
308
304
300
296
292
288
200
150
100
50
0
-50
-100
-150
5,5 6,5 7,5 8,5 9,5 10,5 11,5
5,5 6,5 7,5 8,5 9,5 10,5 11,5
t [s]
Rys. 4. Przebieg synchronizacji silnika rozpoczętej dla kąta
δ
=0 stopni i prądu wzbudzenia o wartości
1,5I
wn
: a) prądy twornika I
s
, prąd wzbudzenia I
w
, napięcie na zaciskach uzwojenia
wzbudzenia U
w
, b) prędkość obrotowa, c) moment elektromagnetyczny
Fig. 4. Motor synchronization in the moment when the agle
δ
=0 deg, value excitation current 1,5I
wn
:
a) armature currents I
s
, excitation current I
w
, voltage on excitation winding terminals U
w
,
b) rotational speed, c) electromagnetic torque

255
t [s]
t [s]
5,5 6,5 7,5 8,5
9,5 10,5 11,5
b)
c)
a)
U
w
I
s
I
w
1000
750
500
250
0
250
500
750
-1000
M[kNm]
n[obr/min]
308
306
304
302
300
298
296
294
150
100
50
0
-50
-100
-150
5,5 6,5 7,5 8,5 9,5 10,5 11,5
5,5 6,5 7,5 8,5 9,5 10,5 11,5
t [s]
Rys. 5. Przebieg synchronizacji silnika rozpoczętej dla kąta
δ
=0 stopni i prądu wzbudzenia o wartości
2,5I
wn
: a) prądy twornika I
s
, prąd wzbudzenia I
w
, napięcie na zaciskach uzwojenia
wzbudzenia U
w
, b) prędkość obrotowa, c) moment elektromagnetyczny
Fig. 5. Motor synchronization in the moment when the agle
δ
=0 deg, value excitation current 2,5I
wn
:
a) armature currents I
s
, excitation current I
w
, voltage on excitation winding terminals U
w
,
b) rotational speed, c) electromagnetic torque

256
Można to uzyskać np. przez impulsowanie napięcia stałego zasilającego obwód wzbu-
dzenia w odpowiednio dobranych chwilach czasowych. Wyniki obliczeń charaktery-
styk podczas procesu synchronizacji badanego silnika z regulacją prądu wzbudzenia
pokazano na rysunku 7. Moment obciążenia przyjęto równy 0,6M
n
a proces synchro-
nizacji zainicjowano dla wartości kąta
δ
równej 0 stopni. W przedstawionych oblicze-
niach jako chwilę wyłączenia napięcia wzbudzenia przyjęto wartość kąta
δ
równą 90
stopni, a ponowne załączenie tego napięcia następowało dla wartości kąta
δ
równej (-
90) stopni (rys. 7a). Przyjęty algorytm sterowania prądem wzbudzenia pozwolił zmi-
nimalizować wartość momentu hamującego i zapewnić skuteczną synchronizację dla
znamionowego prądu wzbudzenia. Sterowanie prądem przez impulsowanie napięcia
stałego zasilającego obwód wzbudzenia pozwala na skuteczną synchronizację silnika
obciążonego momentem większym o 20% w porównaniu z forsowaniem prądu wzbu-
dzenia 1,5I
wn
. Przeprowadzone obliczenia wykazały, że najkorzystniejszym algoryt-
mem sterowania jest wyłączenie napięcia wzbudzenia dla wartości kąta
δ
równej 160
stopni i ponowne załączenie dla wartości równej (-75) stopni.
Prąd wzbudzenia podczas procesu synchronizacji może być sterowany łączni-
kiem tranzystorowym umożliwiającym zmianę polaryzacji napięcia stałego zasilające-
go obwód wzbudzenia [4]. Pozwala to na określoną zmianę kierunku prądu płynącego
w uzwojeniu wzbudzenia dla odpowiednio dobranej chwili czasowej, a przez to
zmniejsza moment hamujący w czasie tego procesu. Schemat układu wzbudzenia z
układem zmiany polaryzacji, popularnie zwanym układem „H”, oraz kondensatorem
ochronnym pokazano na rysunku 6.
Na rysunku 8 przedstawiono wyniki obliczeń procesu synchronizacji badanego sil-
nika z układem zmiany polaryzacji. Moment obciążenia przyjęto równy 0,6M
n
a pro-
ces synchronizacji został rozpoczęty dla wartości kąta
δ
równej 0 stopni. W przedsta-
wionych obliczeniach jako chwilę zmiany polaryzacji napięcia wzbudzenia przyjęto
wartość kąta
δ
równą 90 stopni, a ponowna zmiana polaryzacji tego napięcia następo-
wała dla wartości kąta
δ
równej (-90) stopni. Załączenie ujemnej wartości napięcia
wzbudzenia w chwili, gdy kąt
δ
osiąga wartość 90 stopni pozwala przeforsować do-
datnią wartość prądu płynącego w uzwojeniu wzbudzenia i wymusić przeciwny kieru-
nek jego przepływu (rys.8a). Powoduje to powstanie momentu dynamicznego o do-
datniej wartości i wzrost prędkości wirowania w zakresie ujemnych wartości kąta
δ
od
(-180) do 0 stopni (rys.8b). Ponowna zmiana polaryzacji napięcia wzbudzenia w chwi-
li, gdy kąt
δ
osiąga wartość (-90) stopni pozwala zminimalizować wpływ momentu
hamującego i wymusić przeciwny kierunek przepływu prądu w uzwojeniu wzbudze-
nia w zakresie dodatnich wartości kąta
δ
od 0 do 180 stopni. Wartość momentu hamu-
jącego powstającego w okresie przejściowym, podczas zmiany kierunku prądu, nie
powoduje znaczącego zmniejszenia prędkości wirowania (rys.8b). Dzięki temu pod-
czas kolejnej współfazowości pola stojana i wirnika poślizg silnika ma znacznie
mniejszą wartość niż w początkowym etapie procesu synchronizacji. Powala to na
257
osiągnięcie przez silnik prędkości synchronicznej i skuteczną synchronizację (rys.8a).
Podczas ciężkich rozruchów opisana zmiana kierunku prądu wzbudzenia musi nastę-
pować kilkukrotnie zanim silnik zostanie wciągnięty w synchronizm. Sterowanie war-
tością prądu wzbudzenia przez zastosowanie łącznika tranzystorowego umożliwiają-
cego zmianę polaryzacji napięcia stałego zasilającego obwód wzbudzenia powala na
synchronizację silnika obciążonego momentem o wartości o 30% większej niż przy
forsowaniu prądem 1,5I
wn
. Czas trwania procesu jest znacznie krótszy niż podczas
regulacji prądu przez impulsowanie napięcia stałego. Przeprowadzone obliczenia wy-
kazały, że najkorzystniejszym algorytmem sterowania, dla rozpatrywanego silnika
dwubiegowego, jest zmiana kierunku prądu wzbudzenia dla wartości kąta
δ
równej
125 oraz (-55) stopni. Wybór odpowiedniej chwili zmiany polaryzacji napięcia zasila-
jącego zależy od wartości stałej czasowej obwodu wzbudzenia.
IGBT1
IGBT2
IGBT3
IGBT4
D1
D2
D3
D4
L1
Lcz
R0
L2
Lcz'
R0'
T1
T4
T2
T5
T3
T6
Va
Vb
Vc
TU£S
K1
C
Rys. 6. Schemat uzwojenia wzbudzenia wraz z łącznikiem tranzystorowym pracującym w układzie ”H” i
kondensatorem ochronnym
Fig.6. Schema of excitation winding with transistor switch in “H” circuit and with protective capacitor

258
t [s]
t [s]
5,5 6,5 7,5 8,5
9,5 10,5 11,5 12,5 13
b)
c)
a)
U
w
I
s
I
w
1000
750
500
250
0
250
500
750
-1000
M[kNm]
n[obr/min]
308
306
304
302
300
298
296
294
150
100
50
0
-50
-100
-150
5,5 6,5 7,5 8,5 9,5 10,5 11,5 12,5 13
5,5 6,5 7,5 8,5 9,5 10,5 11,5 12,5 13
t [s]
Rys. 7. Przebieg synchronizacji silnika rozpoczętej dla kąta
δ
=0 stopni, regulacja prądu przez okresowe
wyłączenie napięcia wzbudzenia: a) prądy twornika I
s
, prąd wzbudzenia I
w
, napięcie na zaciskach uzwo-
jenia wzbudzenia U
w
, b) prędkość obrotowa, c) moment elektromagnetyczny
Fig. 7. Motor synchronization in the moment when the agle
δ
=0 deg, current control by periodic switch
off excitation voltage: a) armature currents I
s
, excitation current I
w
, voltage on excitation winding termi-
nals U
w
, b) rotational speed, c) electromagnetic torque
259
t [s]
t [s]
5,5 6,5 7,5 8,5
9,5 10,5 11,5
b)
c)
a)
U
w
I
s
I
w
1000
750
500
250
0
250
500
750
-1000
M[kNm]
n[obr/min]
308
306
304
302
300
298
296
294
150
100
50
0
-50
-100
-150
5,5 6,5 7,5 8,5 9,5 10,5 11,5
5,5 6,5 7,5 8,5 9,5 10,5 11,5
t [s]
Rys. 8. Przebieg synchronizacji silnika rozpoczętej dla kąta
δ
=0 stopni, regulacja prądu przez zmianę
polaryzacji napięcia wzbudzenia: a) prądy twornika I
s
, prąd wzbudzenia I
w
, napięcie na zaciskach uzwo-
jenia wzbudzenia U
w
, b) prędkość obrotowa, c) moment elektromagnetyczny
Fig. 8. Motor synchronization in the moment when the agle
δ
=0 deg, current control by change polariza-
tion excitation voltage: a) armature currents I
s
, excitation current I
w
, voltage on excitation winding termi-
nals U
w
, b) rotational speed, c) electromagnetic torque

260
W chwili zmiany polaryzacji napięcia stałego zasilającego obwód wzbudzenia
mogą powstawać przepięcia, w wyniku których może nastąpić uszkodzenie izolacji
uzwojenia. W celu ochrony przepięciowej konieczne jest zastosowanie kondensatora
ochronnego [5]. Na rysunkach 9 i 10 pokazano fragmenty przebiegów prądu wzbu-
dzenia I
w
oraz napięcia U
w
na zaciskach uzwojenia wzbudzenia w chwili zmiany pola-
ryzacji napięcia zasilającego podczas procesów synchronizacji dla przyjętych pojem-
ności kondensatora ochronnego 1 mF i 10 mF. Zastosowanie kondensatora
ochronnego nie wpływa w sposób istotny na przebieg procesu synchronizacji, a czas
ładowania kondensatora jest zacznie krótszy od stałej czasowej obwodu wzbudzenia.
U
w
I
w
300
200
100
0
-100
-200
-300
5,5 5,9 6,3 6,7 7,1 7,5 7,9
t [s]
Rys. 9. Przebieg synchronizacji silnika rozpoczętej dla kąta
δ
=0 stopni i kondensatora ochronnego o po-
jemności 1 mF: prąd wzbudzenia I
w
, napięcie na zaciskach uzwojenia wzbudzenia U
w
Fig. 9. Motor synchronization in the moment when the agle
δ
=0 deg with protective capacitor of 1mF:
excitation current I
w
, voltage on excitation winding terminals U
w

261
U
w
I
w
300
200
100
0
-100
-200
-300
5,5 5,9 6,3 6,7 7,1 7,5 7,9
t [s]
Rys.10. Przebieg synchronizacji silnika rozpoczętej dla kąta
δ
=0 stopni i kondensatora ochronnego o
pojemności 10 mF: prąd wzbudzenia I
w
, napięcie na zaciskach uzwojenia wzbudzenia U
w
Fig. 10. Motor synchronization in the moment when the agle
δ
=0 deg with protective capacitor of
10 mF: excitation current I
w
, voltage on excitation winding terminals U
w
4. WNIOSKI
Na podstawie wyników obliczeń polowo-obwodowych dwubiegowego silnika syn-
chronicznego można stwierdzić, że sterowanie wartością i kierunkiem prądu wzbu-
dzenia podczas procesu synchronizacji umożliwia:
− wytworzenie dodatniego momentu dynamicznego zarówno w zakresie dodat-
nich jak i ujemnych wartości kąta
δ
,
− zwiększenie skuteczności tego procesu: szczególnie istotne dla dużej wartości
momentu obciążenia silnika,
− znaczne skrócenie czasu tego procesu,
− zmniejszenie pulsacji momentu elektromagnetycznego a tym samym zminima-
lizowanie udarów mechanicznych na wale układu napędowego,
− zmniejszenie mocy urządzeń zainstalowanych w obwodzie zasilającym uzwoje-
nie wzbudzenia silnika.

262
LITERATURA
[1] ANTAL L., ZAWILAK J., Moment dwubiegowego silnika synchronicznego o przełączalnych uzwo-
jeniach twornika i magneśnicy, SME 2003, Gdańsk
−Jurata, 9−11 czerwca, 2003, s. 161-164.
[2] ANTAL L., ZAWILAK J., Pole magnetyczne synchronicznego silnika jawnobiegunowego o dwóch
prędkościach obrotowych, Prace Nauk. IMiNE. PWr. nr 44, Studia i Mat. nr 19, 1996, s. 11-20.
[3] ANTAL L., ZAWILAK J., Wyniki badań dwubiegowego silnika synchronicznego, Masz. Elektr.
Zesz. Probl. BOBRME Komel, 2004, nr 68, s. 107
−112.
[4] SZKLARSKI L., ZARUDZKI J., Elektryczne maszyny wyciągowe, PWN, Warszawa-Kraków, 1998.
[5] BARLIK R.,NOWAK M.,
H
Technika
H
tyrystorowa, WNT, Warszawa, 1997.
[6] ZAWILAK J., Uzwojenia zmiennobiegunowe maszyn elektrycznych prądu przemiennego, Prace Na-
ukowe IMiNE. PWr. 1986.
[7] ZALAS P., ZAWILAK J.: Dwubiegowy silnik synchroniczny w ujęciu polowo-obwodowym, Prace
Nauk. IMiNE. PWr. nr 56, Studia i Materiały nr 23, 2003, s. 65-77.
[8] ZALAS P., ZAWILAK J.: Wybór chwili załączenia napięcia wzbudzenia podczas synchronizacji
silników synchronicznych, Masz. Elektr. Zesz. Probl. BOBRME Komel, 2005, nr 71, s. 59-64.
SYNCHRONIZATION PROCESS OF SYNCHRONOUS MOTORS BY CHANGE
DIRECTION OF EXCITATION CURRENT
The paper presents calculation results of synchronization process of two-speed synchronous motor
with switchable windings of armature and field magnet. It has been proved that the beginning instant of
excitation has quite great influence on dynamic states. The influence on control of excitation current
value on synchronization process has been investigated. The calculations based on field-current model for
motor type GAe1716/20t were performed. The results of calculations were presented as time curves of
state variables.
Wyszukiwarka
Podobne podstrony:
Jan Paweł II, Jan Paweł Wielki
Jan XXIII Paweł VI i Jan Paweł II nie byli świętymi
Jan ZAWILAK
Dariusz GURAZDOWSKI Jan ZAWILAK
Hrycaj Pawel Z , Lacki Jan K Od zwyrodnienia do zapalenia
Ludwik ANTAL Maciej ANTAL Jan ZAWILAK
Psalm 38, Komentarze do Psalmów-Papież Jan Paweł II,Benedykt XVI
Orędzie do młodych 2004, Jan Paweł II
Psalm 4, Komentarze do Psalmów-Papież Jan Paweł II,Benedykt XVI
Psalm 10, Komentarze do Psalmów-Papież Jan Paweł II,Benedykt XVI
Psalm 85, Komentarze do Psalmów-Papież Jan Paweł II,Benedykt XVI
Psalm 51, Komentarze do Psalmów-Papież Jan Paweł II,Benedykt XVI
Homila Pelplin 6 czerwca 1999, Wychowanie i szkoła-Duchowość, Jan Paweł II
Psalm 30, Komentarze do Psalmów-Papież Jan Paweł II,Benedykt XVI
psalm 46, Komentarze do Psalmów-Papież Jan Paweł II,Benedykt XVI
Jak LOLEK został Papieżem, Katecheza, Jan Paweł II
Psalm 79, Komentarze do Psalmów-Papież Jan Paweł II,Benedykt XVI
JPII, Jan Paweł II, Scenariusze
więcej podobnych podstron