51
Elektronika dla Wszystkich
Do czego to służy?
Akwariowy dozownik pokarmu nie jest tylko
przysłowiowym bajerem. Ale staje się tak
tylko wówczas, gdy część mechaniczna jest
niezawodna. Myślę, że udało mi się zapro-
jektować konstrukcję mogącą pracować dłu-
go i niezawodnie.
Zaproponowana koncepcja zawiera tylko
prosty układ sterujący silnikiem dozownika.
Nie pokusiłem się o zaprojektowanie układu
podającego pokarm o określonych godzi-
nach. Zrobiłem tak, ponieważ wiem, że każ-
dy inaczej go sobie wyobraża. Jedni preferu-
ją proste rozwiązania, bez wyświetlaczy
i rzędów nachalnie migających LED-ów. In-
ni kochają LED-y i nie wyobrażają sobie
układów bez nich. Jeszcze inni preferują roz-
wiązania z mikroprocesorem na pokładzie.
Dla jednych będzie to pojedynczy układ, dla
drugich część „kombajnu” sterującego całym
akwarium. Mój projekt charakteryzuje się
elastycznością pozwalającą na łatwą współ-
pracę z różnego typu układami.
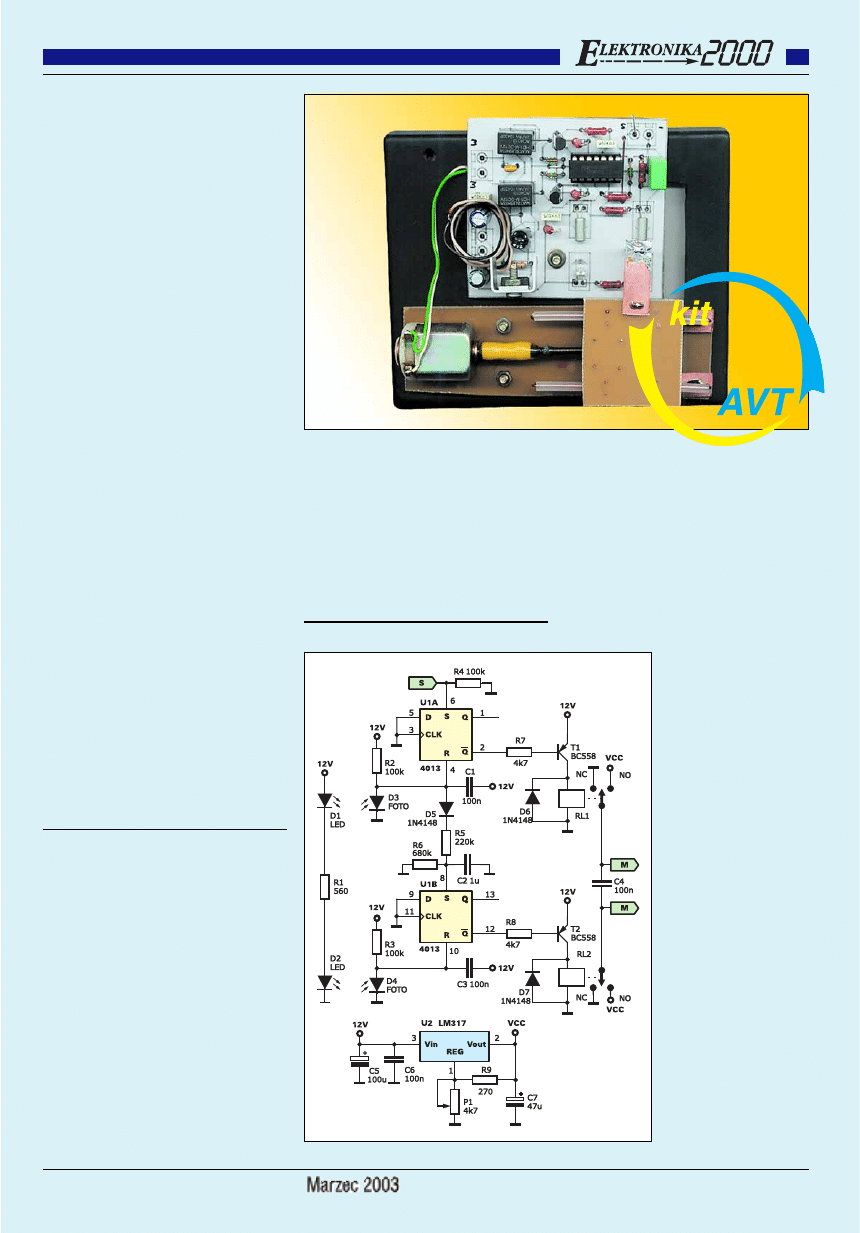
Jak to działa?
Schemat ideowy przedstawiony został na ry-
sunku 1. Dozownikiem pokarmu steruje się
poprzez wejście oznaczone na schemacie li-
terą S. Podanie na wejście impulsu dodatnie-
go spowoduje wydzielenie porcji pokarmu.
Impuls ten nie powinien być zbyt długi. Do-
brze by nie trwał dłużej niż 1 sekundę.
Po podaniu na wejście S dodatniego im-
pulsu, przerzutnik U1A zmieni stany na swo-
ich wyjściach na przeciwne. Zaowocuje to
włączeniem przekaźnika RL1 i włączeniem
silnika podłączonego do wyjść oznaczonych
na schemacie literą M. Do tej pory transoptor
szczelinowy zbudowany z diod D2 i D4 był
przesłonięty przez ruchomą platformę po-
rcjującą pokarm. Załączenie silnika powodu-
je przesunięcie platformy aż do momentu za-
słonięcia drugiego transoptora szczelinowe-
go zbudowanego na diodach D1 i D3. Będzie
to jednoznaczne z podaniem stanu wysokie-
go na wejście reset przerzutnika U1A i za-
trzymaniu pracy silnika.
Przez elementy R2, D5 i R5 ładowany jest
teraz kondensator C2. Gdy napięcie na nim
osiągnie wartość odpowiednią do zaakcepto-
wania przez wejście SET przerzutnika
U1B jako stan wysoki – włączy się przeka-
źnik RL2. Trwa to około 0,5 sekundy i ma
służyć zwiększeniu komfortu pracy silnika.
Silniki elektryczne bardzo bowiem nie lubią
szybkich zmian biegunowości zasilania. Po
tym krótkim wytchnieniu (również dla stabi-
lizatora U2) silnik zacznie pchać platformę
z powrotem. Platforma zatrzyma się, gdy
znów przesłoni transoptor zbudowany z diod
D2 i D4 – co zakończy pracę sterownika.
Z obiektywnych przyczyn układ zasilany
jest napięciem 12V. Jest to napięcie zdecydo-
wanie zbyt wysokie jak dla popularnych sil-
ników z zabawek zasila-
nych 3V. Dlatego też po-
stanowiłem, że napięcie
do silnika dostarczać bę-
dzie stabilizator. Dosko-
nale do tego celu nadaje
się popularny stabilizator
o dobieranym napięciu
wyjściowym LM317.
Można ustawić napięcie
odpowiednie dla posiada-
nego silniczka. W moim
modelu silnik zasilany jest
najniższym oferowanym
przez stabilizator napię-
ciem 1,25V.
Aby przesunąć platfor-
mę z jednego skrajnego
położenia w drugie, silni-
czek potrzebuje niecałej
sekundy. Następnie około
0,5 sekundy przerwy i ko-
lejna sekunda na powrót
do stanu spoczynku.
W czasie tej krótkiej
(z przerwą) pracy, silni-
czek pobiera około
700mA prądu.
Ciąg dalszy na stronie 61.
2
2
6
6
5
5
7
7
+
+
AA
AA
kk
kk
w
w
w
w
aa
aa
rr
rr
ii
ii
oo
oo
w
w
w
w
yy
yy
dd
dd
oo
oo
zz
zz
oo
oo
w
w
w
w
nn
nn
ii
ii
kk
kk
pp
pp
oo
oo
kk
kk
aa
aa
rr
rr
m
m
m
m
uu
uu
Rys. 1 Schemat ideowy
Wyszukiwarka
Podobne podstrony:
edw 2003 03 s56
edw 2003 03 s60
edw 2003 03 s13
edw 2003 03 s16
edw 2003 03 s59
edw 2003 03 s28
edw 2003 03 s52
edw 2003 03 s10
edw 2003 03 s30
edw 2003 12 s51
edw 2003 03 s37
edw 2003 03 s24
edw 2003 03 s22
edw 2003 03 s61
edw 2003 03 s55
edw 2003 03 s30
więcej podobnych podstron