
1
Drgania skrętne wału spalinowego silnika tłokowego.
Wał korbowy silnika spalinowego tłokowego wraz ze sprzęgniętym z nim
odbiornikiem mocy (śrubą okrętową lub prądnicą) i elementami układu
korbowo-tłokowego tworzą układ drgający. Na taki układ oddziaływają
okresowo zmienne momenty pochodzące od nacisku gazów. Momenty te mogą
wywołać drgania skrętne, które w szczególnych warunkach rezonansu rzędów
głównych mogą spowodować pęknięcie wału. Drgania skrętne takiego układu
czyli układu rozpraszającego energię drgań, możliwe są tylko wtedy gdy na
układ ten działa okresowo zmienny moment. Momentem wymuszającym
drgania skrętne wału korbowego jest moment pochodzący od składowej stycznej
siły tłokowej. Zmienność momentu siły stycznej jest taka sama jak siły stycznej
P
s
gdyż promień korby jest wielkością stałą. Jeśli stworzy się wykres siły
stycznej to uzyska się jednocześnie wykres zmienności momentu obrotowego.
Moment obrotowy przedstawiony jako funkcja obrotu korby, zmienia się
okresowo. Dla niezmiennego obciążenia i prędkości obrotowej silnika moment
obrotowy zmienia się raz na obrót (co 2) w silniku dwusuwowym oraz raz na
dwa obroty (co4) w silniku czterosuwowym. Moment obrotowy jest funkcją
okresowo zmienną, ciągłą i określoną w każdym punkcie przedziału. Funkcję o
podanych własnościach można zastąpić nieskończonym szeregiem
trygonometrycznym, zwanym szeregiem Fouriera. Każdy składnik szeregu
Fouriera jest prostą funkcją trygonometryczną (sin lub cos). Natomiast rozkład
przebiegu funkcji na składowe nazywa się analizą harmoniczną albo
harmonicznymi.
Przykład analizy harmonicznej wykresu momentu obrotowego
jednocylindrowego silnika czterosuwowego pokazany jest na poniższym
rysunku. Taki rozłożony moment obrotowy na z momentów składowych
obrazuje działanie tychże okresowo zmiennych momentów tzn mogących
wywołać drgania skrętne.
Drgania skrętne układu silnik-śruba mogą być szczególnie niebezpieczne w
przypadku równej częstotliwości momentu wzbudzającego drgania i
częstotliwość drgań własnych.
W rzeczywistości niektóre z możliwych rezonansów przypadają poza zakresem
eksploatacyjnej prędkości obrotowej, dla innych zaś amplituda drgań
rezonansowych jest tak mała, że drgania te nie mają żadnego praktycznego
znaczenia. Tylko przy braku tłumienia amplituda drgań rezonansowych rośnie
nieograniczenie nawet wtedy, gdy przyczyna wywołująca drgania jest
nieskończenie mała. Podczas drgań układów rzeczywistych występuje zawsze
tłumienie, to znaczy rozpraszanie energii, kosztem której układ drga.

2
W przypadku drgań układu silnik--śruba energia ta jest rozpraszana wskutek
tarcia w łożyskach, tarcia tłoków i pierścieni cylindrach, oporu śruby napędowej
oraz tarcia międzycząstkowego materiału wału korbowego i śrubowego.
Aby układ silnik śruba pobudzić do drgań, moment wymuszający drgania musi
nie tylko zmieniać się z częstotliwością rezonansową, a1e praca tego momentu
musi być większa od pracy sił tłumienia. Rezonansowe drgania występują tylko
dla niektórych rzędów harmonicznych.
Ma to szczególne znaczenie w przypadku rozpędzania silnika oraz w przypadku
obciążeń częściowych. Wynika to z faktu iż silnik w tym czasie przechodzi lub
może pracować przy prędkości obrotowej równej rezonansowej. Dlatego też
unika się takich stanów pracy i podczas rozpędzania silnika przechodzi przez te
prędkości możliwie szybko.
Sześciocylindrowy silnik laboratoryjny Sulzer 6A20/24 został poddany badaniu
dla różnych prędkości obrotowych, i obciążeń oraz przy zasymulowaniu awarii
jaką było wyłączenie z pracy jednego cylindra. Urządzenie pomiarowe w
postaci systemu czujek podłączonych do komputera zbierało dane o prędkości
obrotowej, aktualnym momencie na wale oraz informację o drganiach skrętnych
wału. Program komputerowy umożliwia zapis danych w charakterystycznych
punktach wybranych przez użytkownika dla danej prędkości obrotowej i
warunków (włączony i wyłączony z pracy jeden układ). Dodatkowo komputer
na podstawie zebranych danych jest w stanie wygenerować widmo drgań
skrętnych dla danych obrotów.
3
Tabela pomiarowa:
Pracują wszystkie cylindry
Jeden cylinder wyłączony
Obroty
obr/min
Amplituda
[
o
]
Moment
[Nm]
Naprężenie
[MPa]
Obroty
obr/min
Amplituda
[
o
]
Moment
[Nm]
Naprężenie
[MPa]
456
0,453
1112
26,400
449
0,706
1093
26,400
502
0,461
1342
26,632
502
0,622
1342
30,935
553
0,381
1557
24,211
552
0,528
1557
28,502
605
0,397
1810
24,714
596
0,458
1810
26,545
654
0,419
1995
25,390
604
0,467
1995
26,805
717
0,361
3137
23,567
678
0,467
2137
26,805
Na podstawie danych zebranych przez komputer o drganiach skrętnych wału na
wyjściu z silnika można stosując poniższy wzór, obliczyć naprężenia w
wale.
Gdzie:
G- moduł sprężystości poprzecznej (dla stali 769,3Mpa)
- naprężenie styczne
- kąt skręcenia w stopniach
Podstawione do tego wzoru dane dały wyniki zamieszczone w powyższej tabeli.
Mając dane naprężenie, moment skręcający oraz amplitudę skręcenia można
stworzyć szereg charakterystyk dla silnika z pracującymi wszystkimi cylindrami
oraz dla stanu awaryjnego w którym nie pracuje jeden układ.
Znając moment skręcający oraz średnicę wału można wyznaczyć amplitudę
rzeczywistą kąta skręcenia posługując się poniższym wzorem:
]
[
2
;
2
1
2
Mpa
G
G
φ
τ
τ
φ
=
=
]
[
2
2
2
];
[
2
2
rad
G
W
M
G
W
M
G
Mpa
W
M
S
S
S
S
S
S
=
=
=
=
φ
φ
φ
τ
τ
4
Gdzie:
M
s
- moment skręcający
W
s
- wskaźnik przekroju na skręcanie w miejscu mocowania tensometrów
W zamieszczonej poniżej tabeli znajduje się porównanie amplitud wyznaczonej
z obliczeniową.
Pracują wszystkie cylindry
Jeden cylinder wyłączony
Obroty
obr/min
Amplituda
[
o
]
Amplituda
Rzecz. [rad]
Amplituda
Rzecz. [
o
]
Obroty
obr/min
Amplituda
o
]
Amplituda
Rzecz. [rad]
Amplituda
Rzecz. [
o
]
456
0,453
0,795
0,014
449
0,706
0,768
0,014
502
0,461
1,158
0,020
502
0,622
1,158
0,020
553
0,381
1,559
0,027
552
0,528
1,559
0,027
605
0,397
2,107
0,037
596
0,458
2,107
0,037
654
0,419
2,559
0,045
604
0,467
2,559
0,045
717
0,361
6,328
0,110
678
0,467
2,936
0,110
Charakterystyki:
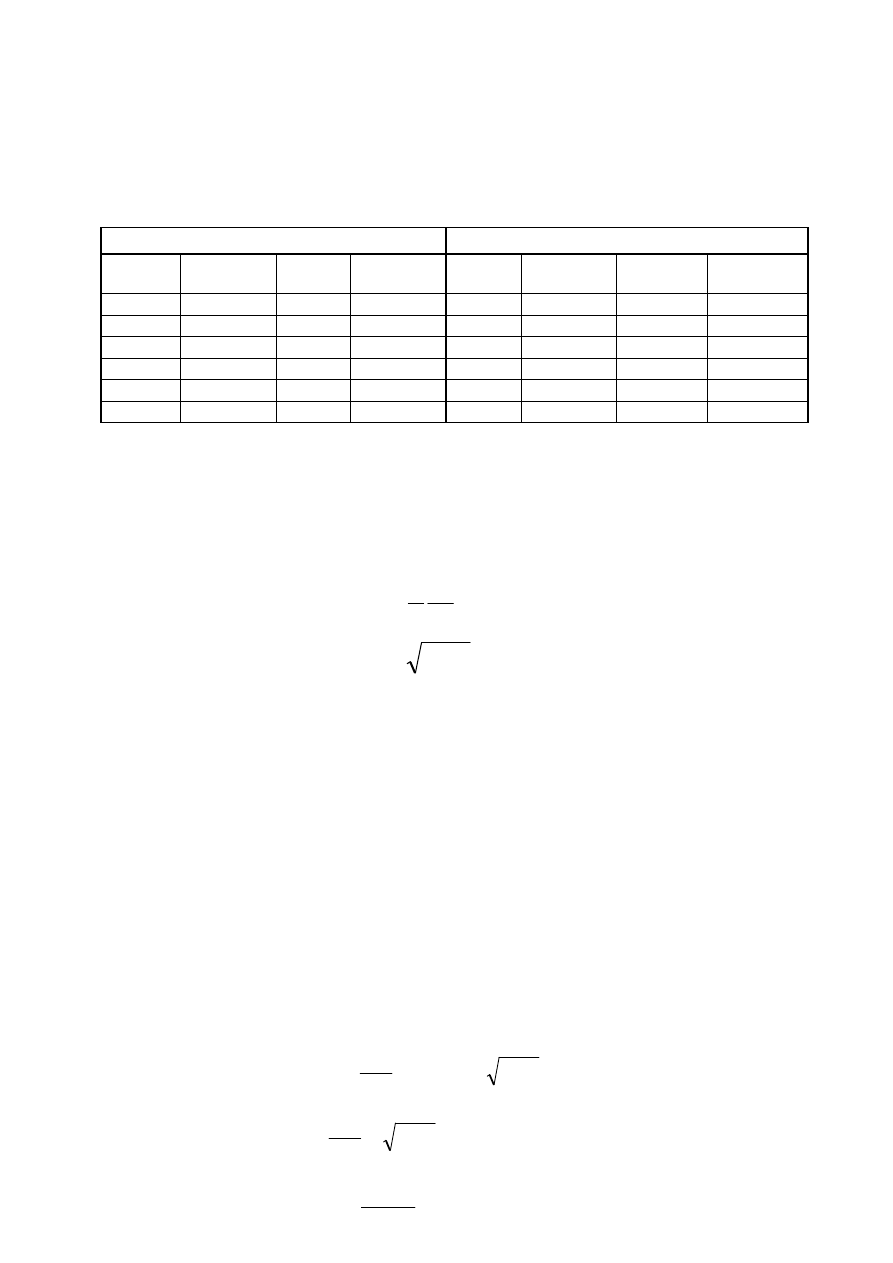
1. Naprężenie i amplituda w funkcji prędkości obrotowej:
a)
pracują wszystkie cylindry
5
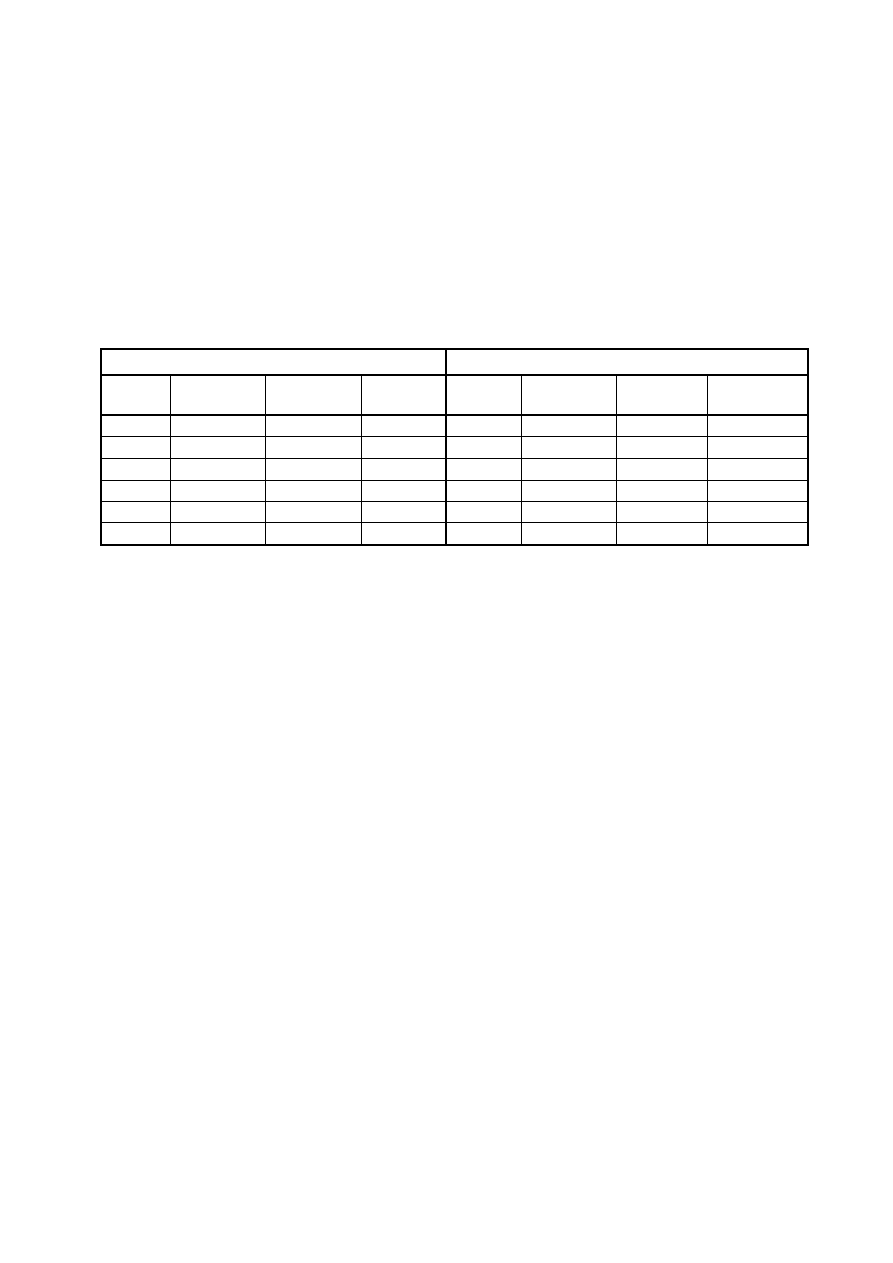
b)
jeden cylinder nie pracuje
21,5
22
22,5
23
23,5
24
24,5
25
25,5
26
26,5
27
456
502
553
605
654
717
Obroty
N
a
p
re
ż
e
n
ie
w
M
P
a
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0,5
A
m
p
it
u
d
a
24
25
26
27
28
29
30
31
32
449
502
552
596
604
678
Obroty
N
a
p
re
ż
e
n
ie
w
M
P
a
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
A
m
p
it
u
d
a
6
2. Wykresy porównawcze naprężeń.
3. Wykres porównawczy amplitud.
21,5
22
22,5
23
23,5
24
24,5
25
25,5
26
26,5
27
450
500
550
600
650
700
Obroty.
N
a
p
r
ę
ż
e
n
ie
w
M
P
a
24
25
26
27
28
29
30
31
32
N
a
p
r
ę
ż
e
n
ie
w
M
P
a
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
450
500
550
600
650
700
Obroty
A
m
p
it
u
d
a
(
k
ą
t
s
k
r
ę
c
e
n
ia
)
7
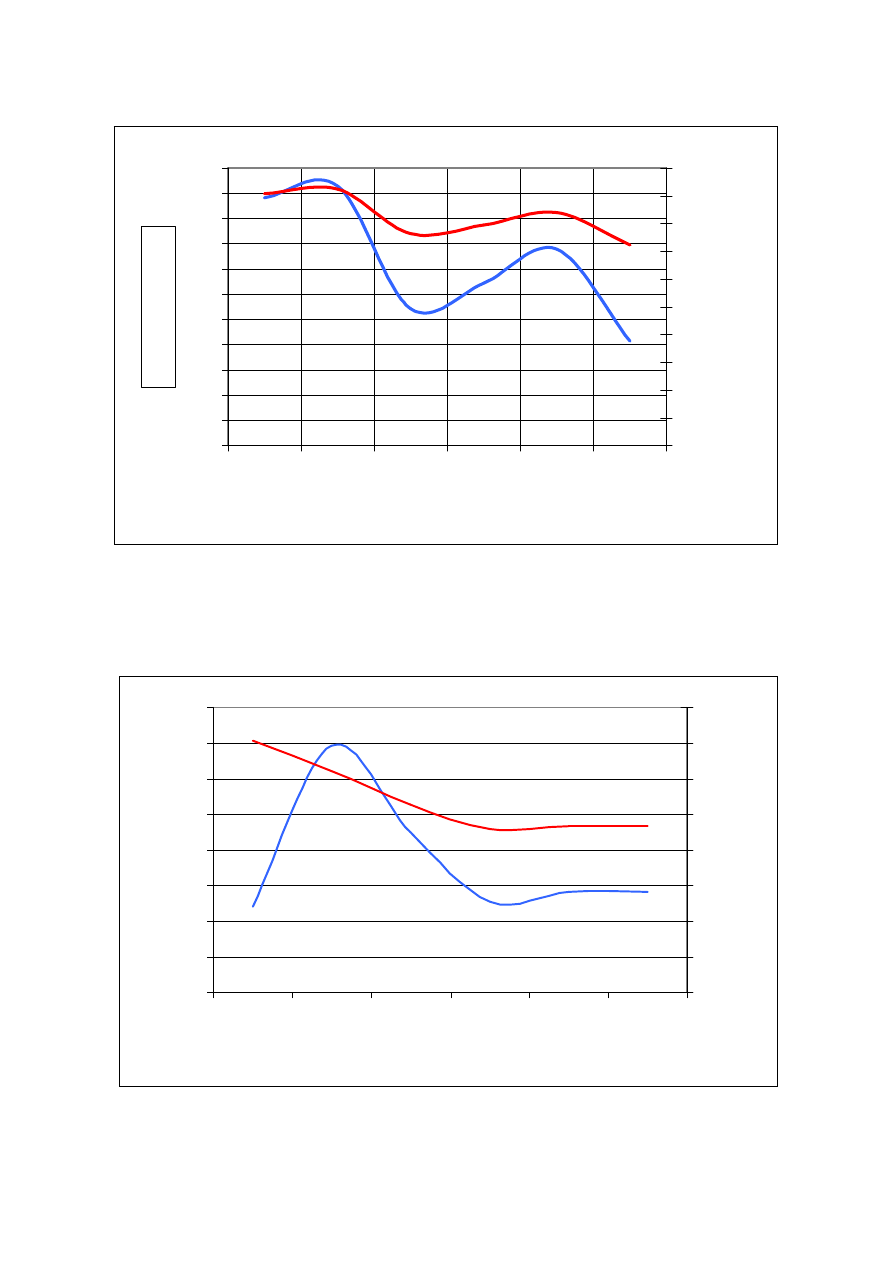
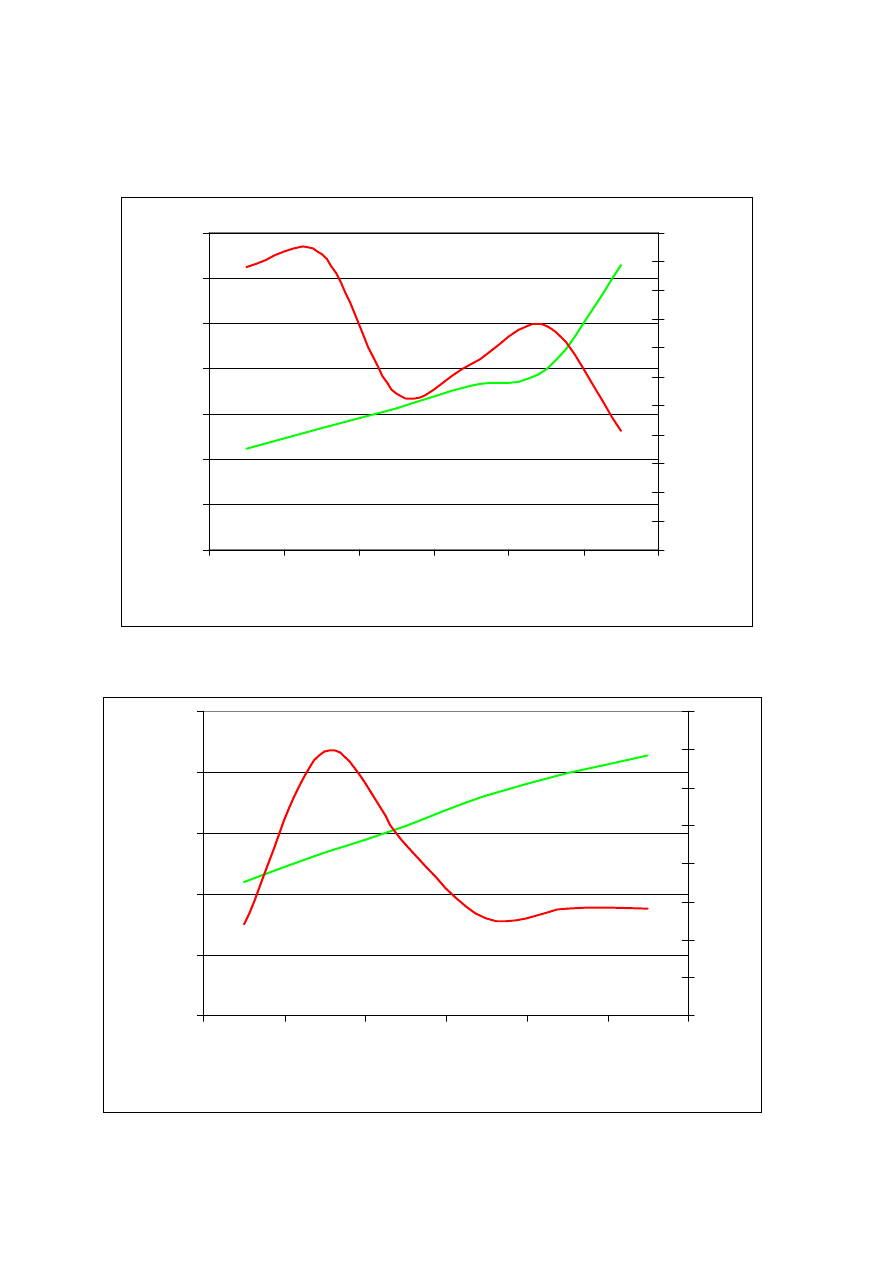
4. Wykres momentu i naprężenia.
a)
pracują wszystkie cylindry
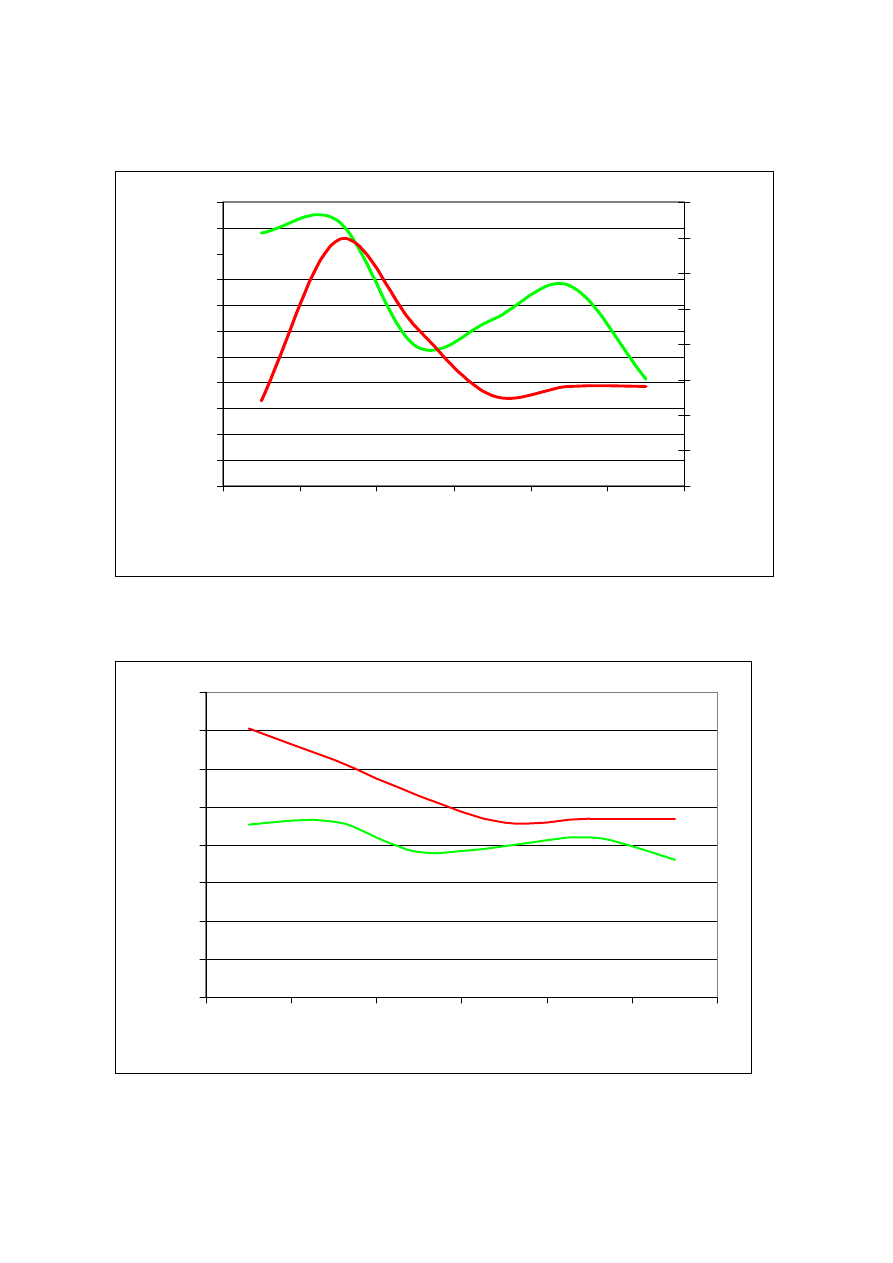
b)
jeden cylinder nie pracuje
0
500
1000
1500
2000
2500
3000
3500
450
500
550
600
650
700
Obroty
M
o
m
e
n
t
21,5
22
22,5
23
23,5
24
24,5
25
25,5
26
26,5
27
N
a
p
r
ę
ż
e
n
ie
w
M
P
a
0
500
1000
1500
2000
2500
450
500
550
600
650
700
Obroty
M
o
m
e
n
t
24
25
26
27
28
29
30
31
32
N
a
p
r
ę
ż
e
n
ie
w
M
p
a

8
Na podstawie widma drgań skrętnych wygenerowanego przez komputer można
określić częstotliwość i prędkość rezonansową która wynosi dla tego wydruku
f=5211 Hz i n=654obr/min.
Wyszukiwarka
Podobne podstrony:
Silniki- drgania skretne walu, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, AM2, AKT
DRGANIA SKRETNE WALU, Silniki
Silniki- drgania skretne walu1, Akademia Morska -materiały mechaniczne, Marcin, Silniki
Silnik rotacyjny, a silnik tłokowy
BADANIE TOKSYCZNOSCI SPALIN Z SILNIKA?NZYNOWEGO
Pomiar zadymienia spalin silnika ZS koncowy
Drgania Skretne Ukladu o Wielu Nieznany
Silnik tłokowy
Badanie toksyczności spalin z silnika?nzynowego i katalitycznej eliminacji gazowych toksyn
Silnik tłokowy
referat- Sposoby obniżania toksyczności spalin silnika o zapłonie samoczynnym, STUDIA - Kierunek Tra
Projekt z Silników Spalinowych, silniki spalinowe
Układ korbowy silnika tłokowego, dla kierowców
Drgania Skrętne Układu o Wielu Stopniach Swobody
metody ogr toks spalin w silnikach
instrukcja bhp przy obsludze przyrzadu do pomiaru czystosci spalin silnikow wysokopreznych dymomierz
Ściągi, Wyposażenie 3, ROZRUSZNIKI Zasada dizłania rozrusznika zadaniem rozrusznika jest wprowadzeni
więcej podobnych podstron