Introduction
Low-frequency radio range
The low-frequency radio range (LFR), also known as the “four-course radio range”, “LF/MF four-
course radio range”, “A-N radio range”, “Adcock radio range”, or commonly "the range", was the main
navigation system used by aircraft for instrument flying in the 1930s and 1940s. It was used for en route
navigation as well as instrument approaches and holds.
Based on a network of radio towers which transmitted directional radio signals, the LFR defined
specific airways in the sky. Pilots navigated the LFR by listening to a stream of automated "A" and "N"
Morse codes. For example, they would turn the aircraft to the right when hearing an "N" stream ("dah-dit,
dah-dit, ..."), to the left when hearing an "A" stream ("di-dah, di-dah, ..."), and fly straight ahead while
hearing a steady tone.
As the VOR system was phased in around the world, the LFR was gradually phased out, mostly
disappearing by the 1970s. There are no remaining operational LFR facilities today. At its maximum
deployment, there were nearly 400 LFR stations in the U.S. alone.
History of LFR
After World War I, aviation began to expand its role into the civilian arena, starting with airmail
flights. It soon became apparent that for reliable mail delivery, as well as the passenger flights which were
soon to follow, a solution was required for navigation at night and in poor visibility. In the U.S., a
network of lighted beacons, similar to maritime lighthouses, was constructed for the airmail pilots. But
the beacons were useful mostly at night and in good weather, while in poor visibility conditions they
could not be seen. Scientists and engineers realized that a radio based navigation solution would allow
pilots to "see" under all flight conditions, and decided a network of directional radio beams was needed.
On September 24, 1929, then-Lieutenant (later General) James H. "Jimmy" Doolittle, U.S. Army,
demonstrated the first "blind" flight, performed exclusively by reference to instruments and without
outside visibility, and proved that instrument flying was feasible. Doolittle used newly developed
gyroscopic instruments-attitude indicator and gyrocompass-to help him maintain his aircraft's attitude and
heading, and a specially designed directional radio system to navigate to and from the airport. Doolittle's
experimental equipment was purpose-built for his demonstration flights; for instrument flying to become
practical, the technology had to be reliable, mass-produced and widely deployed, both on the ground and
in the aircraft fleet.
Jimmy Doolittle demonstrated in 1929 that
instrument flying is feasible.
Doolittle's instrument panel
1
Function of LFR
There were two technological approaches for both the ground and air radio navigation
components, which were being evaluated during the late 1920s and early 1930s.
On the ground, to obtain directional radio beams with a well defined navigable course, crossed
were used initially. The first loop-based LFR system was commissioned by the U.S.
Commerce Department on June 30, 1928. But the loop antenna design suffered from poor performance,
especially at night, and by 1932 the
array, which had superior accuracy, became the
preferred solution and replaced the loop antennas. The
's
referred to the Adcock solution as the "T-L Antenna" (for "Transmission Line") and did not initially
mention Adcock's name.
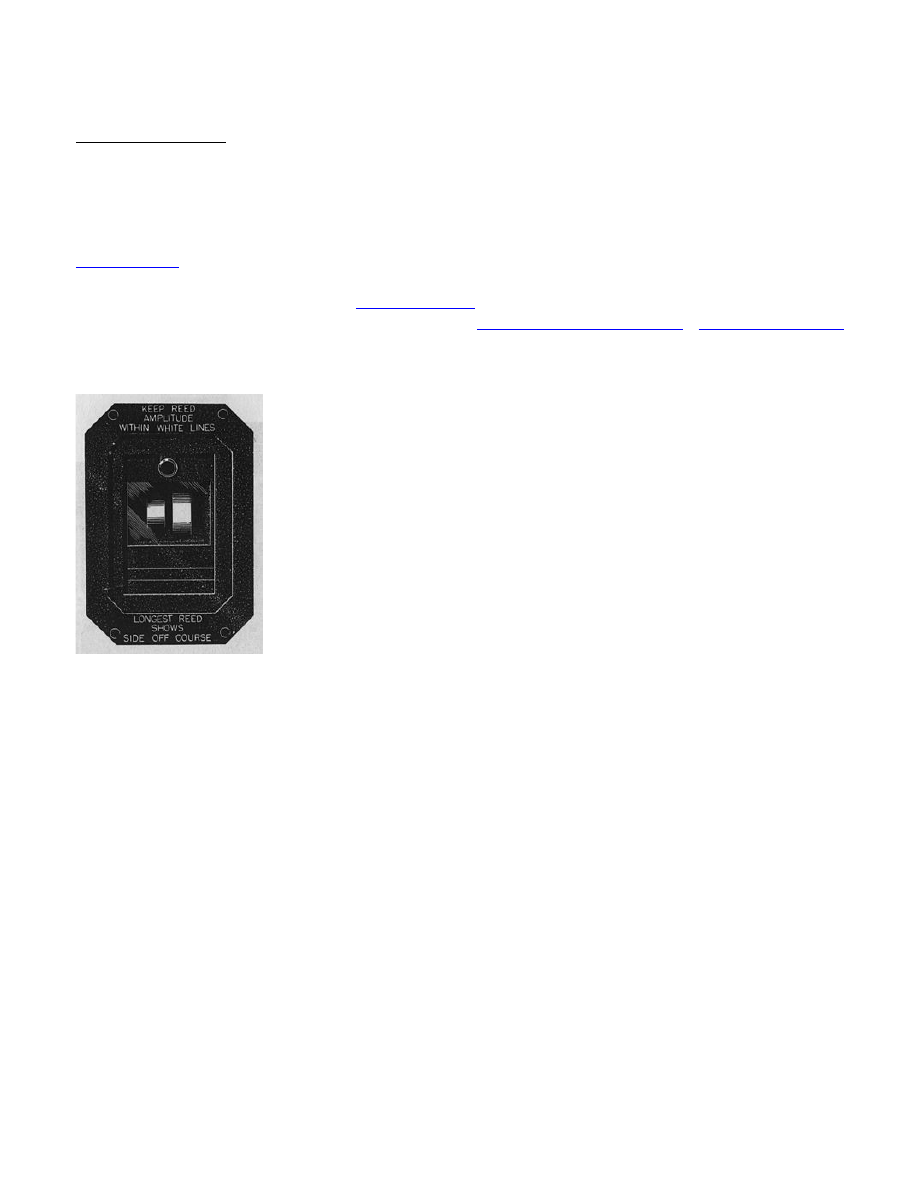
The vibrating reed, developed in the 1920s, was a simple panel mounted instrument with "turn left-right"
indicator.
In the air, there were also two competing designs, originating from groups of different
backgrounds and needs. The Army Signal Corps, representing military aviators, preferred a solution based
on a stream of audio navigation signals, constantly fed into the pilots' ears via a headset. Civilian pilots on
the other hand, who were mostly airmail pilots flying cross-country to deliver the mail, felt the audio
signals would be annoying and difficult to use over long flights, and preferred a visual solution, with an
indicator in the instrument panel.
A visual indicator was developed based on vibrating reeds, which provided a simple panel-
mounted "turn left-right" indicator. It was reliable, easy to use and more immune to erroneous signals than
the competing audio based system. Pilots who had flown with both aural and visual systems strongly
preferred the visual type, according to a published report. The reed-based solution was passed over by the
U.S. government, however, and the audio signals became standard for decades to come.
By the 1930s the LFR network of ground-based radio transmitters, coupled with on board AM
radio receivers, became a vital part of instrument flying. LFR provided navigational guidance to aircraft
2
for en route operations and approaches, under virtually all weather conditions, helping to make consistent
and reliable flight schedules a reality.
Operation of LFR
Ground
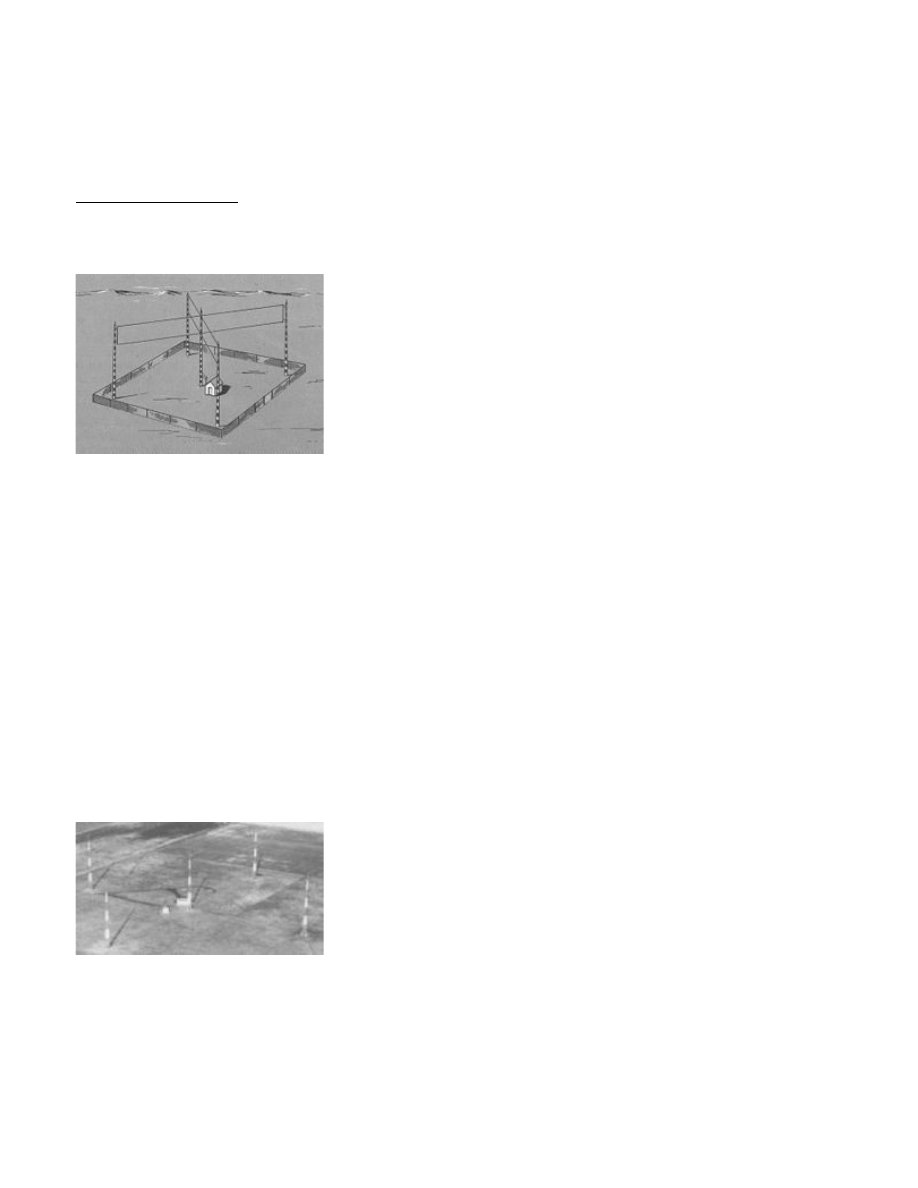
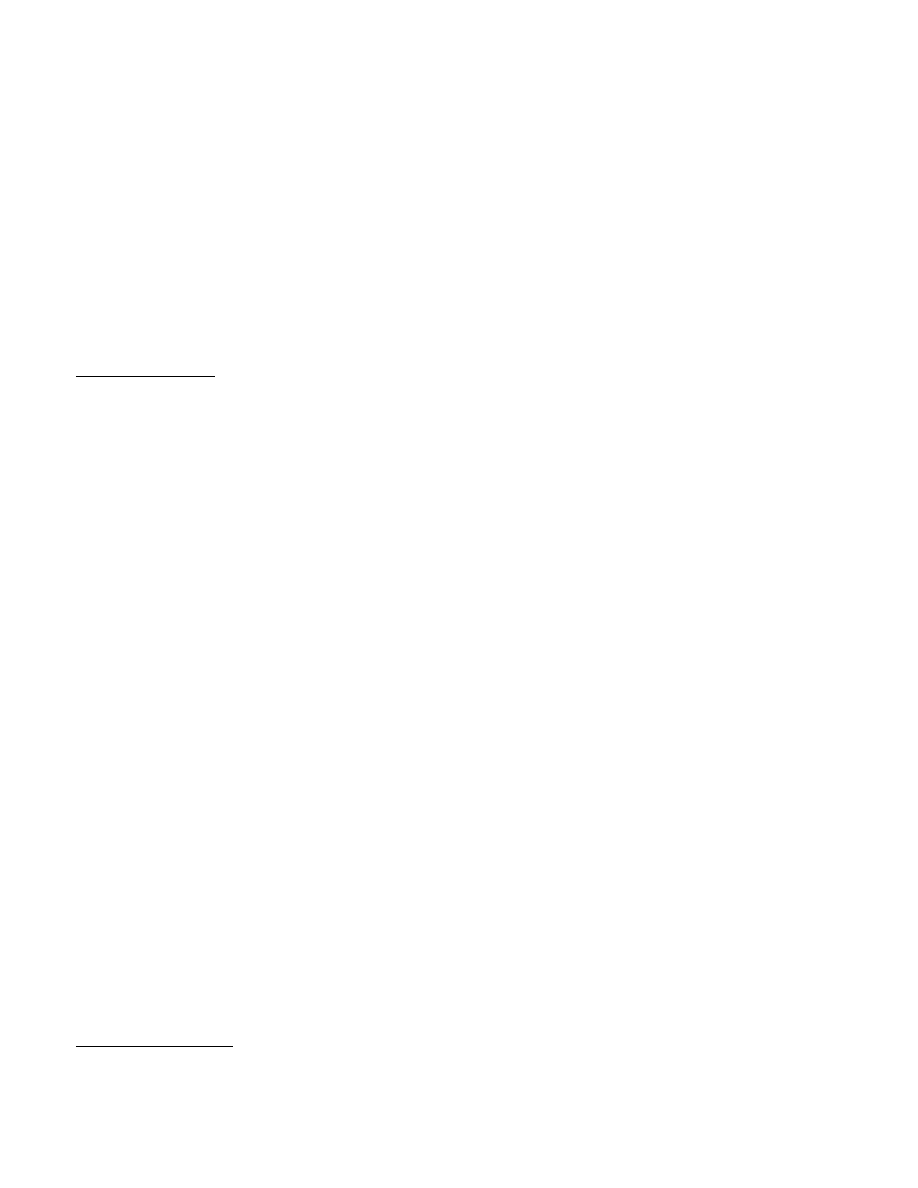
Early LFR station based on crossed loop antennas; later installations used Adcock antennas for improved performance.
The LFR ground component consisted of a network of radio transmission stations which were
strategically located around the country, often near larger airports, approximately 200 miles apart. Early
LFR stations used crossed loop antennas, but later designs were all based on the Adcock vertical antenna
array for improved performance, especially at night.
Each Adcock range station had four 134-foot-tall (41 m) antenna towers erected on the corners of
a 425 x 425 ft square, with an optional extra tower in the center for voice transmission and homing. The
stations emitted directional electromagnetic radiation at 190 to 535 kHz and 1,500 watts, into four
quadrants. The radiation of one opposing quadrant pair was modulated (at an audio frequency of 1,020
Hz) with a Morse code for the letter A (· —), and the other pair with the letter N (— ·).The intersections
between the quadrants defined four course lines emanating from the transmitting station, along four
compass directions, where the A and N signals were of equal intensity, with their combined Morse codes
merging into a steady 1,020 Hz audio tone. These course lines (also called "legs"), where only a tone
could be heard, defined the airways.
Adcock range station. The central fifth tower was typically used for voice transmissions.
In addition to the repeating A or N modulation signal, each transmitting station would also
transmit its two-letter Morse code identifier once every thirty seconds for positive identification. The
station identification would be sent twice: first on the N pair of transmitters, then on the A, to ensure
3
coverage in all quadrants. Also, in some installations local weather conditions were periodically broadcast
in voice over the range frequency, preempting the navigational signals, but eventually this was done on
the central fifth tower.
The LFR was originally accompanied by airway beacons, which were used as a visual backup,
especially for night flights. Additional "marker beacons" (low power VHF radio transmitters) were
sometimes included as supplementary orientation points.
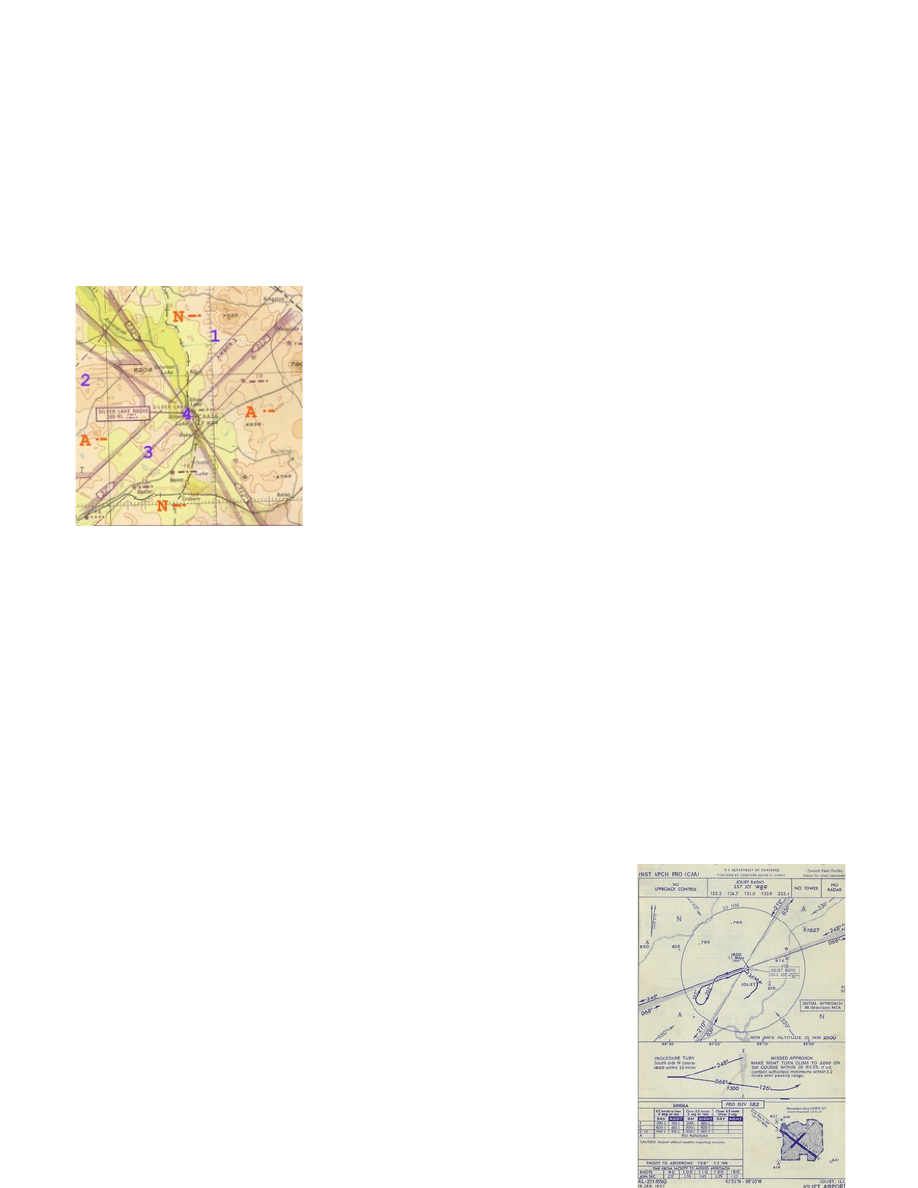
Air
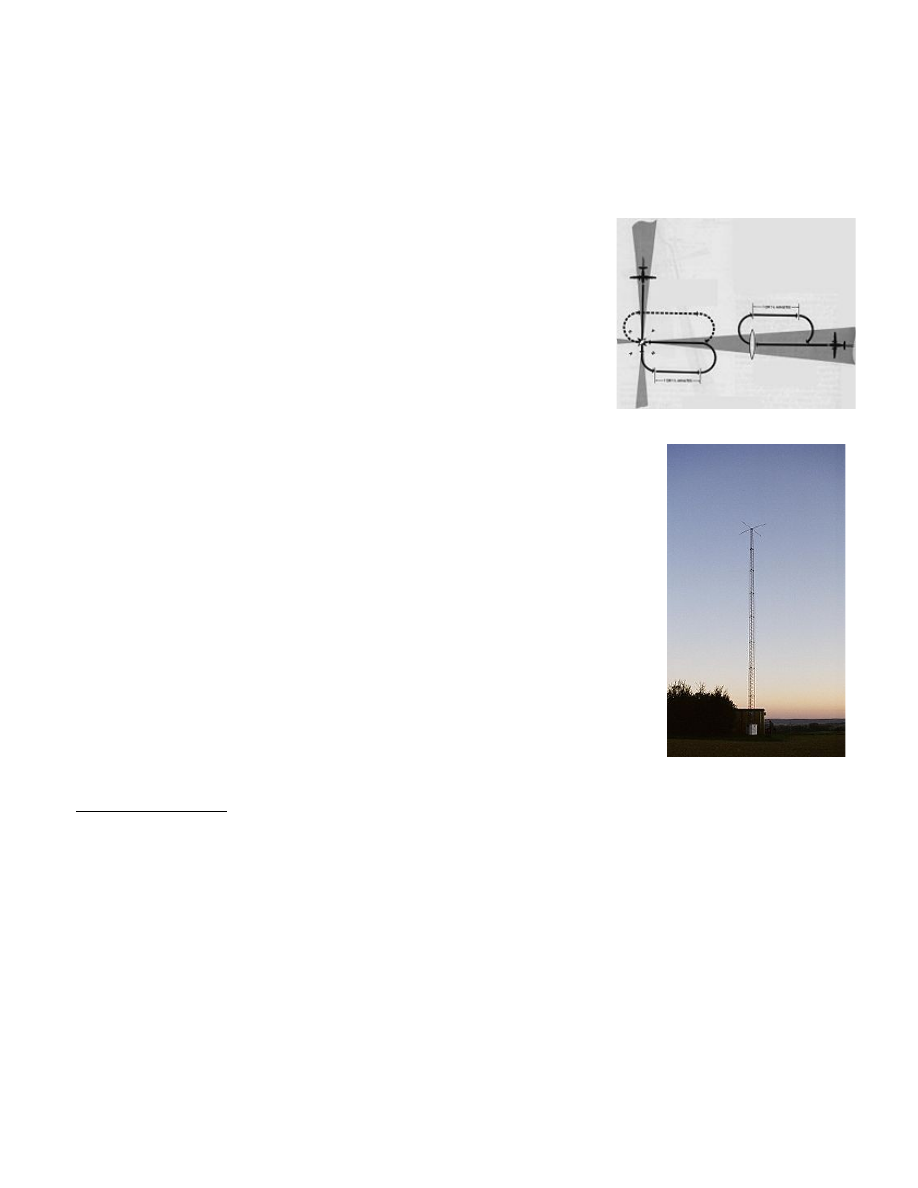
Chart of Silver Lake LFR, frequency 269 kHz. Aircraft at location 1 would hear: "dah-dit, dah-dit, ...", at 2: "di-dah, di-dah, ...", at 3: a steady
tone, and at 4: nothing (Cone of Silence).
The airborne radio receivers—initially simple Amplitude Modulation (AM) sets—were tuned to
the frequency of the LFR ground transmitters, and the Morse code audio was detected and amplified into
speakers, typically in headsets worn by the pilots. The pilots would constantly listen to the audio signal,
and attempt to fly the aircraft along the course lines ("flying the beam"), where a uniform tone would be
heard. If the signal of a single letter (A or N) became audibly distinct, the aircraft would be turned as
needed so that the modulation of the two letters would overlap again, and the Morse code audio would
become a steady tone. The "on course" region, where the A and N audibly merged, was approximately 3°
wide, which translated into a course width of ±2.6 miles when 100 miles away from the station.
Pilots had to verify that they were tuned to the correct range station frequency by comparing its
Morse code identifier against the one published on their navigation charts. They would also verify they
were flying towards or away from the station, by determining if the signal level (i.e. the audible tone
volume) was getting stronger or weaker, respectively.
Approaches and holds
Final approach segments of LFR instrument approaches were
normally flown near the range station, which ensured increased accuracy.
When the aircraft was over the station, the audio signal disappeared, since
there was no modulation signal directly above the transmitting towers. This
quiet zone, called the "Cone of Silence", signified to the pilots that the
aircraft was directly overhead the station, serving as a positive ground
reference point for the approach procedure.
4
In a typical LFR instrument approach procedure, final approach would begin over the range
station, with a turn to a specific course. The pilot would descend to a specified minimum descent altitude
(MDA), and if the airport was not in sight within a specified time (based on ground speed), a missed
approach procedure would be initiated. In the depicted Joliet, IL LFR approach procedure, minimum
descent altitude could be as low as 300 feet AGL, and required minimum visibility one mile, depending
on aircraft type.
The LFR also allowed air traffic control to instruct pilots to enter
a holding pattern "on the beam", i.e. on one of the LFR legs, with the
holding fix (key turning point) over the LFR station, in the Cone of
Silence, or over one of the fan markers. The holds were used either
during the en route portion of a flight or as part of the approach
procedure near the terminal airport. LFR holds were more accurate than
NDB holds, since NDB holding courses are predicated on the accuracy
of the on board magnetic compass, whereas the LFR hold was as
accurate as the LFR leg, with an approximate course width of 3°.
Non-Directional Beacons
The LFR required a complex ground installation (four to five antenna
towers per station) and careful monitoring of its signals, producing directional
radio waves which defined flyable airways, with only a simple AM receiver
needed on board the aircraft. From its beginning in the early 1930s, the LFR
was augmented with Low Frequency Non-directional beacons (NDBs), which
were simple, single-antenna transmitters, whose radio emission pattern was
uniform in all directions in the horizontal plane. Coupled with a more complex
on-board receiver, called radio direction finder (RDF), used to detect the phase
of incoming waves, NDB allowed pilots to determine their azimuth to the
transmitting station, and to navigate to or from the station in conjunction with
their magnetic compass. Early RDF receivers were costly, bulky and difficult to
operate, but the simpler and less expensive ground installation allowed the easy
addition of NDB based waypoints and approaches, to supplement the LFR
system.
LFR Limitations
Although the LFR system was used for decades as the main aeronautical navigation method during low
visibility and night flying, it had some well known limitations and drawbacks.
•
The course lines, which were a result of a balance between the radiation patterns from different
transmitters, would fluctuate depending on weather conditions, vegetation or snow cover near the station,
and even the airborne receiver's antenna angle.
•
The signals from the A quadrant would "skip" into the N quadrant (or vice-versa), causing a false "virtual
course" away from any real course line
5
•
Thunderstorms and other atmospheric disturbances would create electromagnetic interference to
disrupt the range signals and produce crackling "static" in the pilots' headsets.
•
it had only four course directions per station, was sensitive to atmospheric and other types of
interference and aberrations, and required pilots to listen for hours to an annoying monotonous
beep, or a faint stream of Morse codes, often embedded in background "static".
The LFR navigation system required, at a minimum, only a simple AM radio receiver on board the
aircraft to accurately navigate the airways under instrument meteorological conditions, and even execute
an instrument approach to low minimums.
VHF omnidirectional range
Introduction
VOR, short for VHF omni-directional radio range, is a type of radio navigation system for aircraft.
A VOR ground station broadcasts a VHF radio composite signal including the station's identifier, voice (if
equipped), and navigation signal. The identifier is morse code. The voice signal is usually station name,
in-flight recorded advisories, or live flight service broadcasts. The navigation signal allows the airborne
receiving equipment to determine a magnetic bearing from the station to the aircraft (direction from the
VOR station in relation to the Earth's magnetic North at the time of installation). VOR stations in areas of
magnetic compass unreliability are oriented with respect to True North. This line of position is called the
"radial" from the VOR. The intersection of two radials from different VOR stations on a chart provides
the position of the aircraft.
Developed from earlier Visual-Aural Range (VAR) systems, the VOR was designed to provide
360 courses to and from the station, selectable by the pilot. Early vacuum tube transmitters with
mechanically-rotated antennas were widely installed in the 1950s, and began to be replaced with fully
solid-state units in the early 1960s. They became the major radio navigation system in the 1960s, when
they took over from the older radio beacon and four-course (low/medium frequency range) system. Some
of the older range stations survived, with the four-course directional features removed, as non-directional
low or medium frequency radiobeacons (NDBs).
A worldwide land-based network of "air highways", known in the US as Victor airways (below
18,000 feet) and "jetways" (at and above 18,000 feet), was set up linking VORs. An aircraft can follow a
specific path from station to station by tuning the successive stations on the VOR receiver, and then either
following the desired course on a Radio Magnetic Indicator, or setting it on a Course Deviation Indicator
(CDI, shown below) or a Horizontal Situation Indicator (HSI, a more sophisticated version of the VOR
indicator) and keeping a course pointer centered on the display.
Presently, due to advances in technology, many airports are replacing VOR and NDB approaches
with RNAV (GPS) approach procedures, however, receiver and data update costs
are still significant
enough that many small general aviation aircraft are not equipped with a GPS certified for primary
navigation or approaches.
Instrumentation
6
Technical Specification
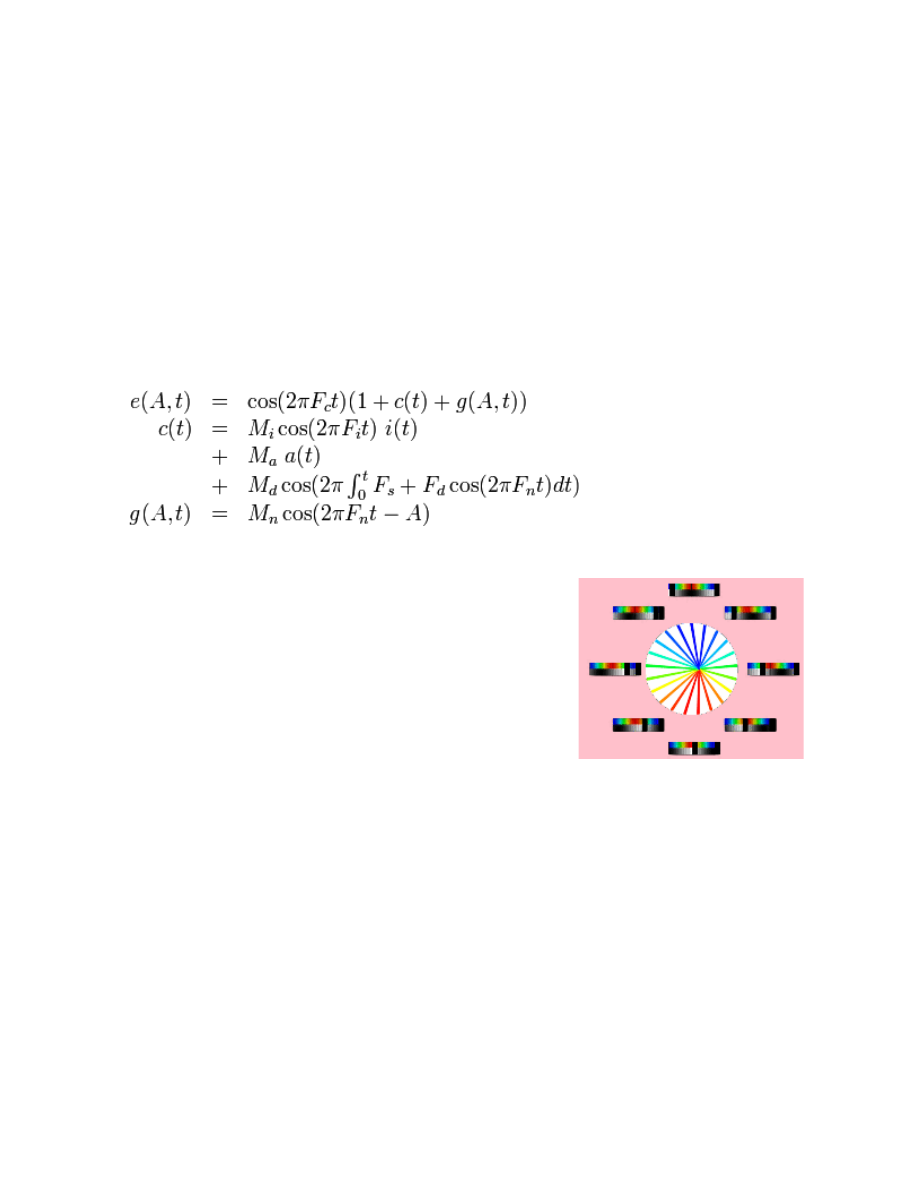
The VOR signal encodes a morse code indentifer, optional voice, and a pair of navigation tones. The
radial azimuth is equal to the phase angle between the lagging and leading navigation tone.
CVOR
The conventional signal encodes the station identifier, i(t), optional voice a(t), and
navigation reference signal in, c(t), the isotropic (i.e. omnidirectional) component. The
reference signal is encoded on an F3 subcarrier (color). The navigation variable signal is
encoded by mechanically or electrically rotating a directional, g(A,t), antenna to produce A3
modulation (grayscale). Receivers (paired color and grayscale trace) in different directions
from the station paint a different alignment of F3 and A3 demodulated signal.
DVOR
The doppler signal encodes the station identifier, i(t),
optional voice, a(t), and navigation variable signal in, c(t), an
isotropic (i.e. omnidirectional) component. The navigation
variable signal is A3 modulated (grayscale). The navigation
reference signal is delayed, t
+
, t
-
, by electrically revolving a pair of
transmitters. The cyclic blue shift, and corresponding red shift, as
a transmitter closes on and recedes from the receiver results in F3
modulation (color). The pairing of transmitters offset equally high
and low of the isotropic carrier frequency produce the upper and
lower sidebands. Closing and receding equally on opposite sides
of the same circle around the isotropic transmitter produce F3
subcarrier modulation, g(A,t).
where the revolution radius R = F
d
C / (2 π F
n
F
c
) is 6.76 ± 0.3 m .
The transmitter acceleration 4 π
2
F
n
2
R, 24 KG, makes mechanical
revolution impractical, and halves (gravitational redshift) the
frequency change ratio compared to transmitters in freefall.
7
{kind=link}
Doppler VOR
red(F3-) green(F3) blue(F3+)
black(A3-) gray(A3)
white(A3+)
USB transmitter offset is
exaggerated
LSB transmitter is not shown

Accuracy and Reliability
The predictable accuracy of the VOR system is ±1.4°. However, test data indicate that 99.94% of the time
a VOR system has less than ±0.35° of error. Internal monitoring of a VOR station will shut it down, or
change-over to a Standby system if the station error exceeds some limit. A Doppler VOR beacon will
typically change-over or shutdown when the bearing accuracy exceeds 1.0°. National air space authorities
may often set tighter limits. For instance, in Australia, a Primary Alarm limit may be set as low as +/- 0.5
degrees on some Doppler VOR beacons.
VOR beacons monitor themselves by having one or more receiving antennas located away from the
beacon. The signals from these antennas are processed to monitor many aspects of the signals. The signals
monitored are defined in various US and European standards. The principal standard is European
Organisation for Civil Aviation Equipment (EuroCAE) Standard ED-52. The five main parameters
monitored are the bearing accuracy, the reference and variable signal modulation indices, the signal level,
and the presence of notches (caused by individual antenna failures).
Note that the signals received by these antennas, in a Doppler VOR beacon, are different from the signals
received by an aircraft. This is because the antennas are close to the transmitter and are affected by
proximity effects. For example the free space path loss from nearby sideband antennas will be 1.5dB
different (at 113 MHz and at a distance of 80 m) from the signals received from the far side sideband
antennas. For a distant aircraft there will be no measurable difference. Similarly the peak rate of phase
change seen by a receiver is from the tangential antennas. For the aircraft these tangential paths will be
almost parallel, but this is not the case for an antenna near the DVOR.
Their performance is measured by aircraft fitted with test equipment. The VOR test procedure is to fly
around the beacon in circles at defined distances and altitudes, and also along several radials. These
aircraft measure signal strength, the modulation indices of the reference and variable signals, and the
bearing error. They will also measure other selected parameters, as requested by local/national airspace
authorities. Note that the same procedure is used (often in the same flight test) to check Distance
Measuring Equipment (DME).
In practice, bearing errors can often exceed those defined in Annex 10, in some directions. This is usually
due to terrain effects, buildings near the VOR, or, in the case of a DVOR, some counterpoise effects. Note
that Doppler VOR beacons utilise an elevated groundplane that is used to elevate the effective antenna
pattern. It creates a strong lobe at an elevation angle of 30 degrees which complements the zero degree
lobe of the antennas themselves. This groundplane is called a counterpoise. A counterpoise though, rarely
works exactly as one would hope. For example, the edge of the counterpoise can absorb and re-radiate
signals from the antennas, and it may tend to do this differently in some directions than others.
Doppler VOR beacons are inherently more accurate than Conventional VORs because they are more
immune to reflections from hills and buildings. The variable signal in a DVOR is the 30 Hz FM signal; in
a CVOR it is the 30 Hz AM signal. If the AM signal from a CVOR beacon bounces off a building or hill,
the aircraft will see a phase that appears to be at the phase centre of the main signal and the reflected
signal, and this phase centre will move as the beam rotates. In a DVOR beacon, the variable signal, if
reflected, will seem to be two FM signals of unequal strengths and different phases. Twice per 30 Hz
cycle, the instantaneous deviation of the two signals will be the same, and the phase locked loop will get
(briefly) confused. As the two instantaneous deviations drift apart again, the phase locked loop will follow
the signal with the greatest strength, which will be the line-of-sight signal. If the phase separation of the
8
two deviations is small, however, the phase locked loop will become less likely to lock on to the true
signal for a larger percentage of the 30Hz cycle (this will depend on the bandwidth of the output of the
phase comparator in the aircraft). In general, some reflections can cause minor problems, but these are
usually about an order of magnitude less than in a CVOR beacon.
Constants
Standard
modulation modes, indices, and frequencies
Descriptio
n
Form
ula
Notes
Min Nom Max
Unit
s
ident
i(t)
on
1
off
0
M
i
A3 modulation index
0.07
F
i
A1 subcarrier
frequency
1020
Hz
voice
a(t)
-1
+1
M
a
A3 modulation index
0.30
navigation
F
n
A0 tone frequency
30
Hz
variable
M
n
A3 modulation index
0.30
reference
M
d
A3 modulation index
0.30
F
s
F3 subcarrier
frequency
9960
Hz
F
d
F3 subcarrier
deviation
480
Hz
channel
F
c
A3 carrier frequency
108.0
0
117.9
5
MHz
carrier spacing
50
50
kHz
speed of
light
C
299.7
9
Mm/s
radial
azimuth
A
relative to magnetic
north
0
359 deg
9
Variables
Symbols
Descriptio
n
Form
ula
Notes
time signal
left
t
center transmitter
t
+
(A,t)
higher frequency revolving
transmitter
t
-
(A,t)
lower frequency revolving
transmitter
signal
strength
c(t)
isotropic
g(A,t)
anisotropic
e(A,t)
received
US Standard Service Volumes (excerpted
from FAA AIM
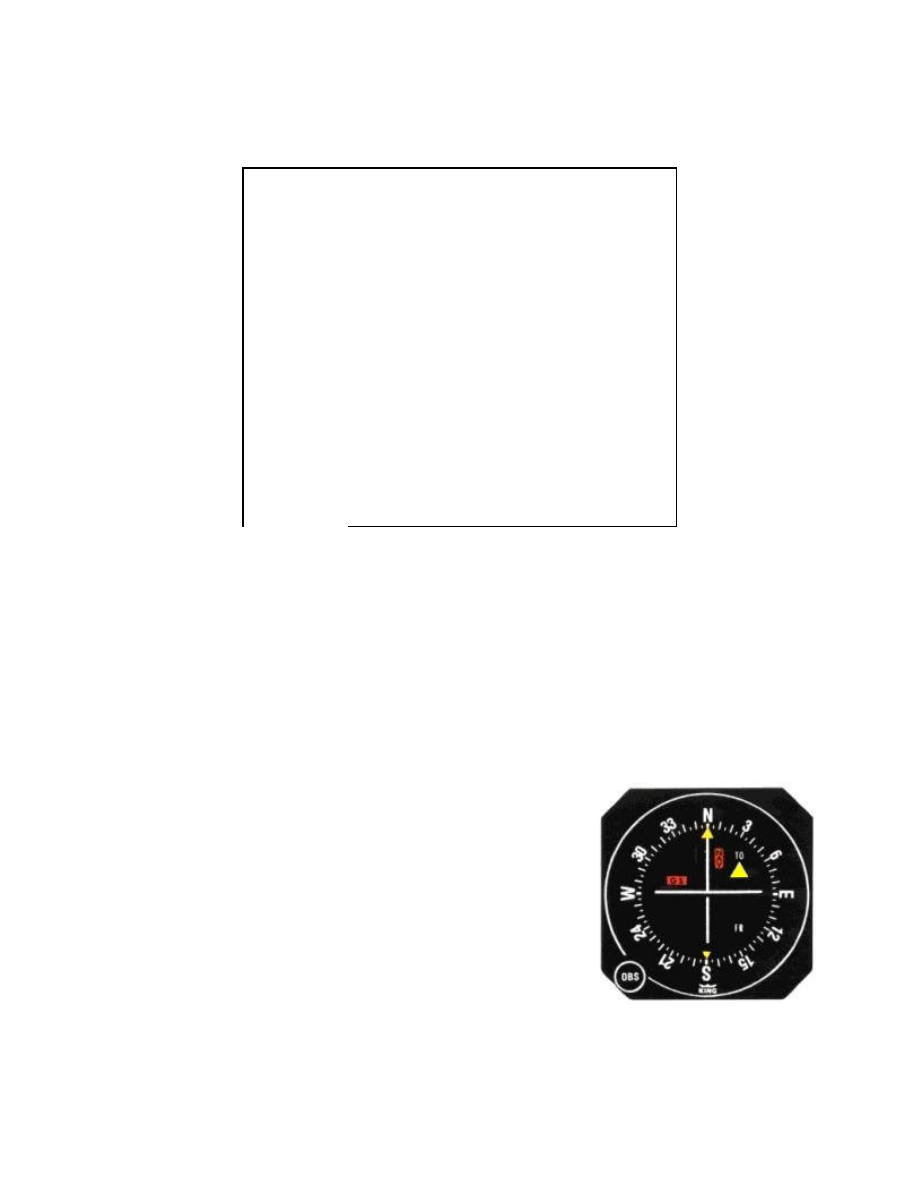
Using a VOR
If a pilot wants to approach the VOR station from due east then
the aircraft will have to fly due west to reach the station. The
pilot will use the OBS to rotate the compass dial until the number
27 (270 degrees) aligns with the pointer (called the Primary
Index) at the top of the dial. When the aircraft intercepts the 90-
degree radial (due east of the VOR station) the needle will be
centered and the To/From indicator will show "To". Notice that
the pilot sets the VOR to indicate the reciprocal; the aircraft will
follow the 90-degree radial while the VOR indicates that the
course "to" the VOR station is 270 degrees. This is called
"proceeding inbound on the 090 radial." The pilot needs only to
keep the needle centered to follow the course to the VOR station.
If the needle drifts off-center the aircraft would be turned towards the needle until it is centered again.
After the aircraft passes over the VOR station the To/From indicator will indicate "From" and the aircraft
10
is then proceeding outbound on the 270 degree radial. The CDI needle may oscillate or go to full scale in
the "cone of confusion" directly over the station but will recenter once the aircraft has flown a short
distance beyond the station.
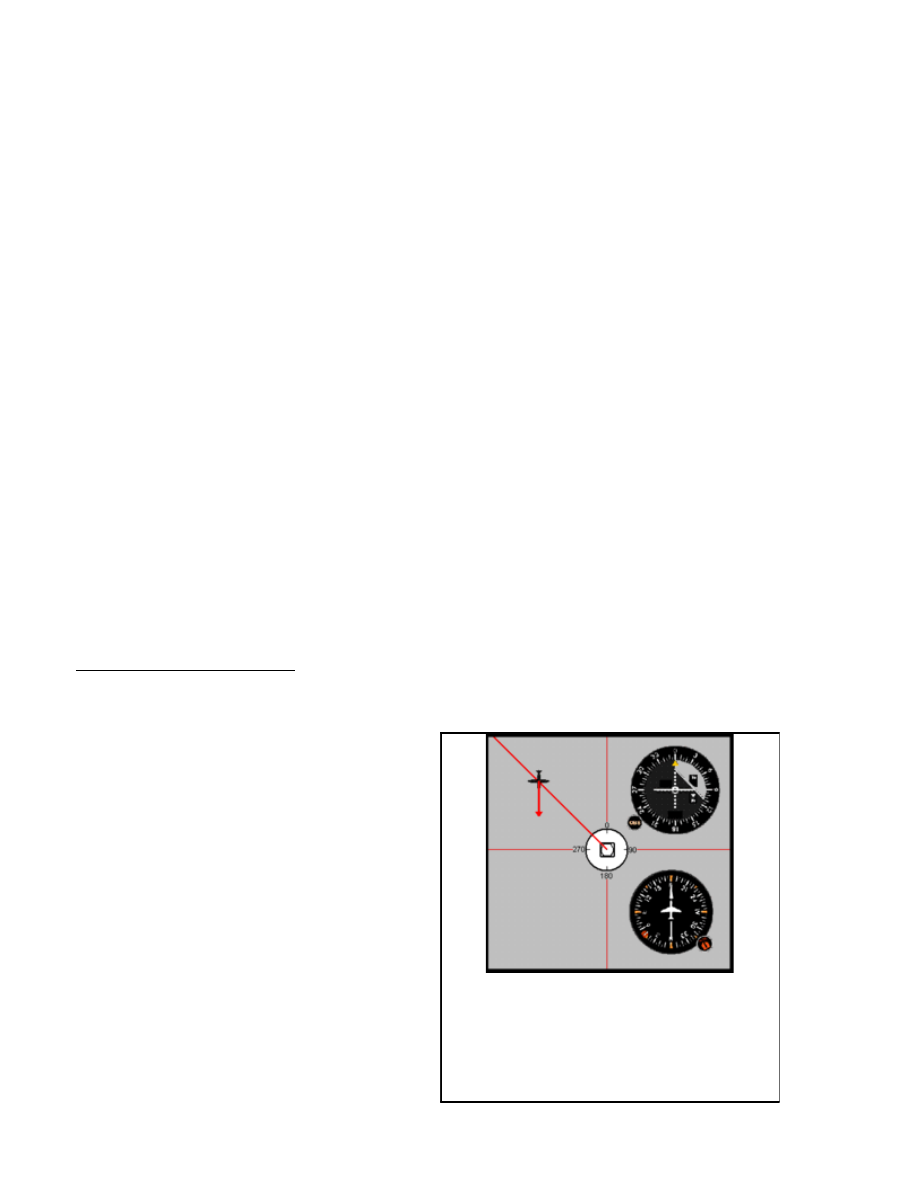
In the illustration, notice that the heading ring is set with 360 degrees (North) at the primary
index, the needle is centered and the To/From indicator is showing "TO". The VOR is indicating that the
aircraft is on the 360 degree course (North) to the VOR station (i.e. the aircraft is South of the VOR
station). If the To/From indicator were showing "From" it would mean the aircraft was on the 360 degree
radial from the VOR station (i.e. the aircraft is North of the VOR). Note that there is absolutely no
indication of what direction the aircraft is flying. The aircraft could be flying due West and this snapshot
of the VOR could be the moment when it crossed the 360 degree radial. An interactive VOR simulator
can be seen here.
Testing
Before using a VOR indicator for the first time, it can be tested and calibrated at an airport with a
VOR test facility, or VOT. A VOT differs from a VOR in that it replaces the variable directional signal
with another omnidirectional signal, in a sense transmitting a 360° radial in all directions. The NAV
receiver is tuned to the VOT frequency, then the OBS is rotated until the needle is centered. If the
indicator reads within four degrees of 000 with the FROM flag visible or 180 with the TO flag visible, it
is considered usable for navigation. The FAA requires testing and calibration of a VOR indicator no more
than 30 days before any flight under IFR.
Parts and Functions
Intercepting VOR Radials
There are many methods available to
determine what heading to fly to intercept a
radial from the station or a course to the station.
The most common method involves the
acronym T-I-T-P-I-T. The acronym stands for
Tune - Identify - Twist - Parallel - Intercept -
Track. Each of these steps are quite important to
ensure the airplane is headed where it is being
directed. First, tune the desired VOR frequency
into the navigation radio, second and most
important, Identify the correct VOR station by
verifying the morse code heard with the
sectional chart. Third, twist the VOR OBS knob
to the desired radial (FROM) or course (TO) the
station. Fourth, bank the airplane till the heading
indicator indicates the radial or course set in the
11
Aircraft in NW quadrant with VOR
indicator shading heading from 360 to
090 degrees
VOR. The fifth step is to fly towards the needle. If the needle is to the left, turn left by 30-45 degrees and
vice versa. The last step is once the VOR needle is centered, turn the heading of the airplane back to the
radial or course to track down the radial or course flown. If there is wind, a wind correction angle will be
necessary to maintain the VOR needle centered.
Another method to intercept a VOR radial exists and more closely aligns itself with the operation of an
HSI (Horizontal Situation Indicator). The first three steps above are the same; tune, identify and twist. At
this point, the VOR needle should be displaced to either the left or the right. Looking at the VOR
indicator, the numbers on the same side as the needle will always be the headings needed to return the
needle back to center. The aircraft heading should then be turned to align itself with one of those shaded
headings. If done properly, this method will never produce reverse sensing.
A good example is this, an airplane is traveling in the northwest quadrant in relation to the VOR. The
exact VOR radial the aircraft is on is 315 degrees. After tuning, identifying and twisting the OBS knob to
360 degrees, the needle deflects to the right. The needle shades the numbers between 360 and 090. If the
airplane turns to a heading anywhere in this range, the airplane will intercept the radial.
SSV Class
Designato
r
Dimensions
T
(Terminal)
From 1,000 feet above ground level (AGL) up to and including 12,000 feet AGL
at radial distances out to 25 NM.
L (Low
Altitude)
From 1,000 feet AGL up to and including 18,000 feet AGL at radial distances out
to 40 NM.
H (High
Altitude)
From 1,000 feet AGL up to and including 14,500 feet AGL at radial distances out
to 40 NM. From 14,500 AGL up to and including 60,000 feet at radial distances
out to 100 NM. From 18,000 feet AGL up to and including 45,000 feet AGL at
radial distances out to 130 NM.
VORs, Airways and the Enroute Structure
12

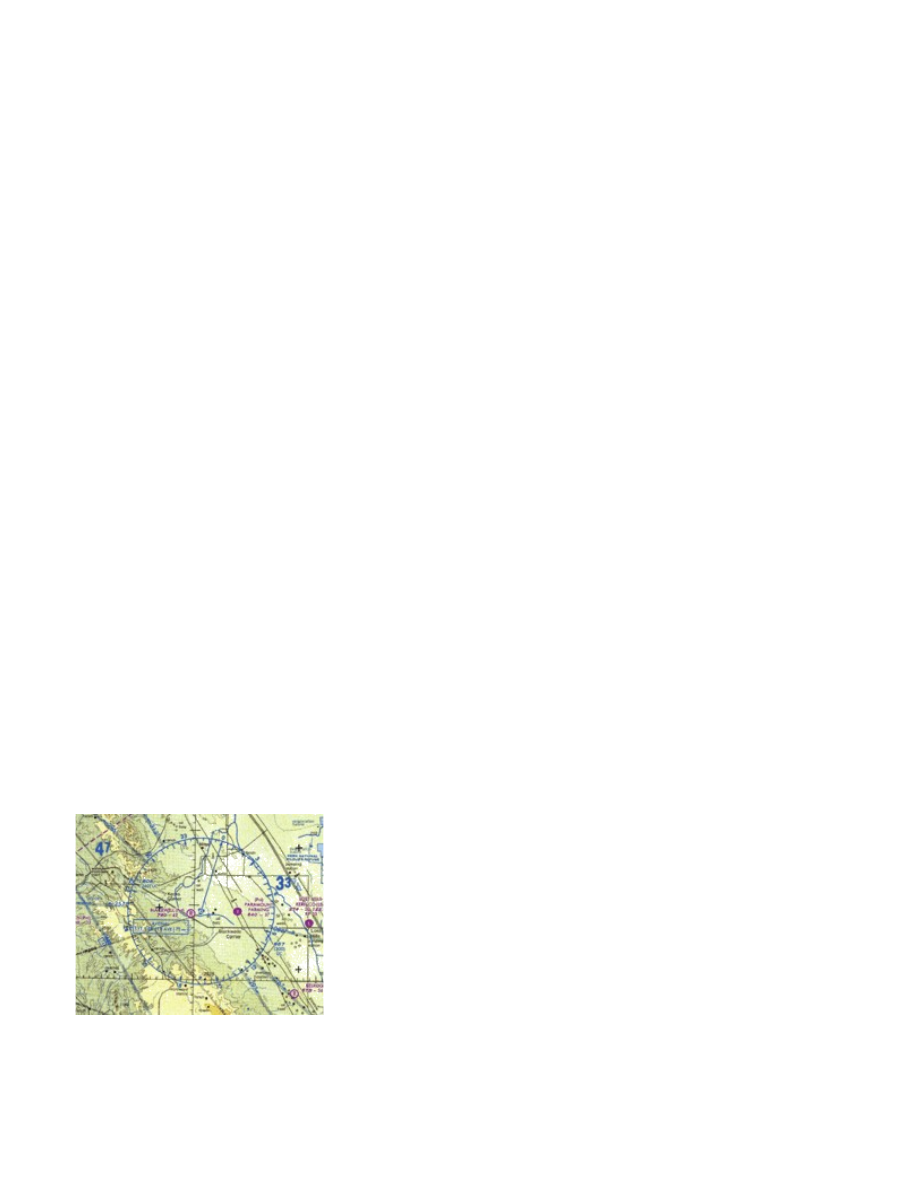
The Avenal VORTAC shown on a sectional aeronautical chart. Notice the light blue Victor Airways
radiating from the VORTAC. (click to enlarge)
VOR and the older NDB stations were traditionally used as intersections along airways. A typical airway
will hop from station to station in straight lines. As you fly in a commercial airliner you will notice that
the aircraft flies in straight lines occasionally broken by a turn to a new course. These turns are often
made as the aircraft passes over a VOR station or at an intersection in the air defined by one or more
VORs. Navigational reference points can also be defined by the point at which two radials from different
VOR stations intersect, or by a VOR radial and a DME distance. This is the basic form of RNAV and
allows navigation to points located away from VOR stations. As RNAV systems have become more
common, in particular those based upon GPS, more and more airways have been defined by such points,
removing the need for some of the expensive ground-based VORs. A recent development is that, in some
airspace, the need for such points to be defined with reference to VOR ground stations has been removed.
This has led to predictions that VORs will be obsolete within a decade or so. There are three types of
VORs: High Altitude, Low Altitude and Terminal. The range of the three differ. Terminal VORs are
accurate to 25 NM outward up to 12,000 ft.
In many countries there are two separate systems of airway at lower and higher levels: the lower Airways
(known in the US as Victor Airways) and Upper Air Routes (known in the US as Jet routes).
Most aircraft equipped for instrument flight (IFR) have at least two VOR receivers. As well as providing a
backup to the primary receiver, the second receiver allows the pilot to easily follow a radial toward one
VOR station while watching the second receiver to see when a certain radial from another VOR station is
crossed, essentially seeing when a particular fix is crossed.
Operation
VORs are assigned radio channels between 108.0 MHz (megahertz) and 117.95 MHz (with
50 kHz spacing); this is in the VHF (very high frequency) range. The VOR encodes azimuth (direction
from the station) as the phase relationship of a reference and a variable signal. The omni-directional signal
contains a modulated continuous wave (MCW) 7 wpm Morse code station identifier, and usually contains
an amplitude modulated (AM) voice channel. The conventional 30 Hz reference signal is on a 9960 Hz
frequency modulated (FM) subcarrier. The variable amplitude modulated (AM) signal is conventionally
derived from the lighthouse-like rotation of a directional antenna array 30 times per second. Although
older antennas were mechanically rotated, current installations scan electronically to achieve an
equivalent result with no moving parts. When the signal is received in the aircraft, the two 30 Hz signals
are detected and then compared to determine the phase angle between them. The phase angle by which the
AM signal lags the FM subcarrier signal is equal to the direction from the station to the aircraft, in degrees
from local magnetic north, and is called the "radial."
This information is then fed to one of four common types of indicators:
1.
An Omni-Bearing Indicator (OBI) is the typical light-airplane VOR indicator
and is shown in the
accompanying illustration. It consists of a knob to rotate an "Omni Bearing Selector" (OBS), and
the OBS scale around the outside of the instrument, used to set the desired course. A "course
deviation indicator" (CDI) is centered when the aircraft is on the selected course, or gives left/right
13

steering commands to return to the course. An "ambiguity" (TO-FROM) indicator shows whether
following the selected course would take the aircraft to, or away from the station.
2.
A Horizontal Situation Indicator (HSI) is considerably more expensive and complex than a
standard VOR indicator, but combines heading information with the navigation display in a much
more user-friendly format, approximating a simplified moving map.
3. A Radio Magnetic Indicator (RMI), developed previous to the HSI, features a course arrow
superimposed on a rotating card which shows the aircraft's current heading at the top of the dial.
The "tail" of the course arrow points at the current radial from the station, and the "head" of the
arrow points at the reciprocal (180 degrees different) course to the station.
4.
An Area Navigation (RNAV) system is an onboard computer, with display, and up-to-date
navigation database. At least two VOR stations, or one VOR/DME station is required, for the
computer to plot aircraft position on a moving map, or display course deviation relative to a
waypoint (virtual VOR station).
In many cases, VOR stations have co-located DME (Distance Measuring Equipment) or military
TACAN (TACtical Air Navigation) — the latter includes both the DME distance feature and a separate
TACAN azimuth feature that provides military pilots data similar to the civilian VOR. A co-located VOR
and TACAN beacon is called a VORTAC. A VOR co-located only with DME is called a VOR-DME. A
VOR radial with a DME distance allows a one-station position fix. Both VOR-DMEs and TACANs share
the same DME system
Features
VORs signals provide considerably greater accuracy and reliability than NDBs due to a
combination of factors. VHF radio is less vulnerable to diffraction (course bending) around terrain
features and coastlines. Phase encoding suffers less interference from thunderstorms.
VOR signals offer a predictable accuracy of 90 meters, 2 sigma at 2 nm from a pair of VOR beacons;
as
compared to the accuracy of an augmented Global Positioning System (GPS) which is less than 13
meters, 95%.
Repeatable VOR accuracy is 23 meters, 2 sigma. VOR signals originate from fixed ground
stations, usually below the aircraft, often at landing facilities. Low incidence angle reflection from ground
and clouds above enhances signal strength. Low frequency (30 Hz) suffers less timing distortion by
reflection. VOR stations fixed relative to landing facilities are usable for approaches without the
trigonometric pre-calculations Area Navigation database required for GPS.
VOR stations rely on "line of sight" because they operate in the VHF band—if the transmitting antenna
cannot be seen on a perfectly clear day from the receiving antenna, a useful signal cannot be received.
This limits VOR (and DME) range to the horizon—or closer if mountains intervene. Although the modern
solid state transmitting equipment requires much less maintenance than the older units, an extensive
network of stations, needed to provide reasonable
.
14

Introduction
Automatic Direction Finder
One of the older types of radio navigation is the automatic direction finder (ADF) or non-
directional beacon (NDB). The ADF receiver, a "backup" system for the VHF equipment, can be used
when line-of-sight transmission becomes unreliable or when there is no VOR equipment on the ground or
in the aircraft. It is used as a means of identifying positions, receiving low and medium frequency voice
communications, homing, tracking, and for navigation on instrument approach procedures.
The low/medium frequency navigation stations used by ADF include non-directional beacons, ILS
radio beacon locators, and commercial broadcast stations. Because commercial broadcast stations
normally are not used in navigation, this section will deal only with the non-directional beacon and ILS
radio beacon.
A non-directional radio beacon (NDB) is classed according to its power output and usage:
1. the L radio beacon has a power of less than 50 watts (W),
2. the M classification of radio, beacon has a power of 50 watts up to 2,000 W;
3. the H radio beacon has a power output of 2,000 W or more;
4. the ILS radio beacon is a beacon which is placed at the same position as the outer marker of an
ILS system (or replaces the OM).
15
Functions of ADF
There are several applications for the ADF in light aircraft cross country VMC navigation –
remembering the Visual Flight Rules require that the pilot must be able to navigate by reference to the
ground and position fixes must be taken at least every 30 minutes.
Position fixes. If two (or better - three) transmitters are in range then the bearing from each can be
ascertained, the lines of position roughly plotted on the chart (after converting to true bearings) and the
aircraft position will be close to the intersection point. In most of Australia to have two NDBs in range at
the same time is not so common and three would be most unlikely, so the most likely position fixing use
is to combine a surface line feature with an NDB bearing.
Running fix / distance from NDB. The 1-in-60 rule can be applied when the aircraft is within
range of a transmitter by turning the aircraft so that the station is abeam and then measuring the degrees
traversed against time. This is a form of running fix in that two bearings are taken, at an interval, from one
source and the aircraft's position is the distance along the second LOP from the NDB. For example:
Distance [nm] to NDB = elapsed time [minutes] × ground speed [knots] / degrees traversed
Homing & tracking to or from an NDB. If there is no crosswind component then tracking
toward an NDB is quite simple, just keep the head of the ADF needle at TDC and you will arrive
overhead; the track over the ground will be straight and the magnetic heading consistent. However if there
is a crosswind component and you just endeavour to keep the head of the ADF needle at TDC, you will
eventually arrive but, due to the drift, the track followed will be curved and the magnetic heading will
need to be consistently changing. This is called homing, and you will arrive at the NDB on an into-wind
heading. Thus tracking, or flying directly towards, or from, an NDB is exactly the same as tracking from
A to B – you have to calculate a wind correction angle. Passage overhead an NDB is signified by a "cone
of silence" (if the ident volume has been turned up beforehand) and the needle then swinging to the
reciprocal bearing.
Using the ADF probably appears to be fairly simple, which it is, but there will be difficulties, for the
uninitiated in perceiving, from the position of the needle, the headings to fly when attempting to intercept
and then track along a particular magnetic bearing to or from the ground station.
As in all navigation you should always maintain an awareness of the aircraft's position in terms of being
north, south, east or west of the NDB and, when initiating a turn, think in the same terms e.g. a left turn
will take you further east.
NDB/ADF ERRORS
Electrical interference.
Radio waves are emitted by the aircraft alternator in the frequency band of the ADF. An alternator
suppressor is fitted to contain those emissions but this component does not have a long life and it is wise
16

to test the ADF for correct operation during pre-flight checks. The test is made by selecting a transmitter –
which must be a reasonable distance away, say 30 nm – then watch the ADF needle during the engine run
up. If the needle moves as rpm increase there is electrical interference and probably the alternator
suppressor should be replaced. Magnetos may also interfere with the ADF.
Thunderstorms emit electrical energy in the NDB band and will deflect the ADF needle towards the
storm.
Twilight/night effect.
Radio waves arriving at a receiver come both directly from the transmitter – the ground wave – and
indirectly as a wave reflected from the ionosphere – the sky wave. The sky wave is affected by the daily
changes in the ionosphere, read the ionisation layers section in the Aviation Meteorology Guide. Twilight
effect is minimal on transmissions at frequencies below 350 kHz.
Terrain and coastal effects.
In mountainous areas NDB signals may be reflected by the terrain which can cause the bearing
indications to fluctuate. Some NDBs located in conditions where mountain effect is troublesome transmit
at the higher frequency of 1655 kHz. Ground waves are refracted when passing across coast lines at low
angles and this will affect the indicated bearing for an aircraft tracking to seaward and following the shore
line.
Attitude effects.
The indicated bearing will not be accurate whilst the aircraft is banked.
Intrumentation
The NDB Control Panels figure, on the right, shows the major
ADF components except the receiving antenna, which on most light
aircraft is a length of wire running from an insulator on the cabin to
the vertical stabilizer.
l . RECEIVER: Controls on the ADF receiver permit the pilot to
tune the station desired and to select the mode of operation. \When
tuning the receiver the pilot must positively identify the station. The
low or medium frequency radio beacons transmit a signal with
1,020 Hertz (cycles per second [Hz]) modification keyed to provide
continuous identification except during voice communications. All
air facilities radio beacons transmit a continuous two- or three-unit
identification in Morse code, except for ILS front course radio
beacons which normally transmit a continuous one letter identifier in Morse code. The signal is received,
amplified, and converted to audible voice or Morse code transmission. The signal also powers the bearing
indicator.
Tuning the ADF- To tune the ADF receiver, the pilot should follow these steps:
17
a. turn the function knob to the RECEIVE mode. This turns the set on and selects the mode that
provides the best reception. Use the RECEIVE mode for tuning the ADF and for continuous
listening when the ADF function is not required;
b. select the desired frequency band and adjust the volume until background noise is heard;
c. with the tuning controls, tune the desired frequency and then re-adjust volume for best listening
level and identify the station;
d. to operate the radio as an automatic direction finder, switch the function knob to ADF; and
e. the pointer on the bearing indicator shows the bearing to the station in relation to the nose of the
aircraft. A loop switch aids in checking the indicator for proper operation. Close the switch. The
pointer should move away from the bearing of the selected station. Then release the switch; the
pointer should return promptly to the bearing of the selected station. A sluggish return or no return
indicates malfunctioning of the equipment or a signal too weak to use.
2. CONTROL BOX - DIGITAL READOUT TYPE: Most modern aircraft have this type of control in
the cockpit. In this equipment the frequency tuned is displayed as a digital readout of numbers rather than
tuning a frequency band.
a) Function Selector (Mode Control). Allows selection of OFF, ADF, ANT or TEST Position.
•
ADF - Automatically determines bearing to selected station and displays it on the RMI. Uses sense
and loop antennae.
•
ANT - Reception of Radio signals using the sense antenna. Recommended for tuning.
•
TEST - Performs ADF system self-test. RMI needle moves to 315°.
b) Frequency Selector Switches. Three concentric knobs permit selection of operating frequency. Two
frequencies can be preselected. Only one can be used at a time. The transfer switch indicates the
frequency in use.
c) Selected Frequency Indicators. Provides a visual read-out of the frequencies selected. The numbers
can be printed on drums that rotate vertically or, in more modern sets, they arc displayed by light emitting
diodes.
3. ANTENNAE: The ADF receives signals on both loop and sense antennae. The loop antenna in
common use today is a small flat antenna without moving parts. Within the antenna are several coils
spaced at various angles. The loop antenna senses the direction of the station by the strength of the signal
on each coil but cannot determine whether the bearing is TO or FROM the station. The sense antenna
provides this latter information, and also voice reception when the ADF function is not required.
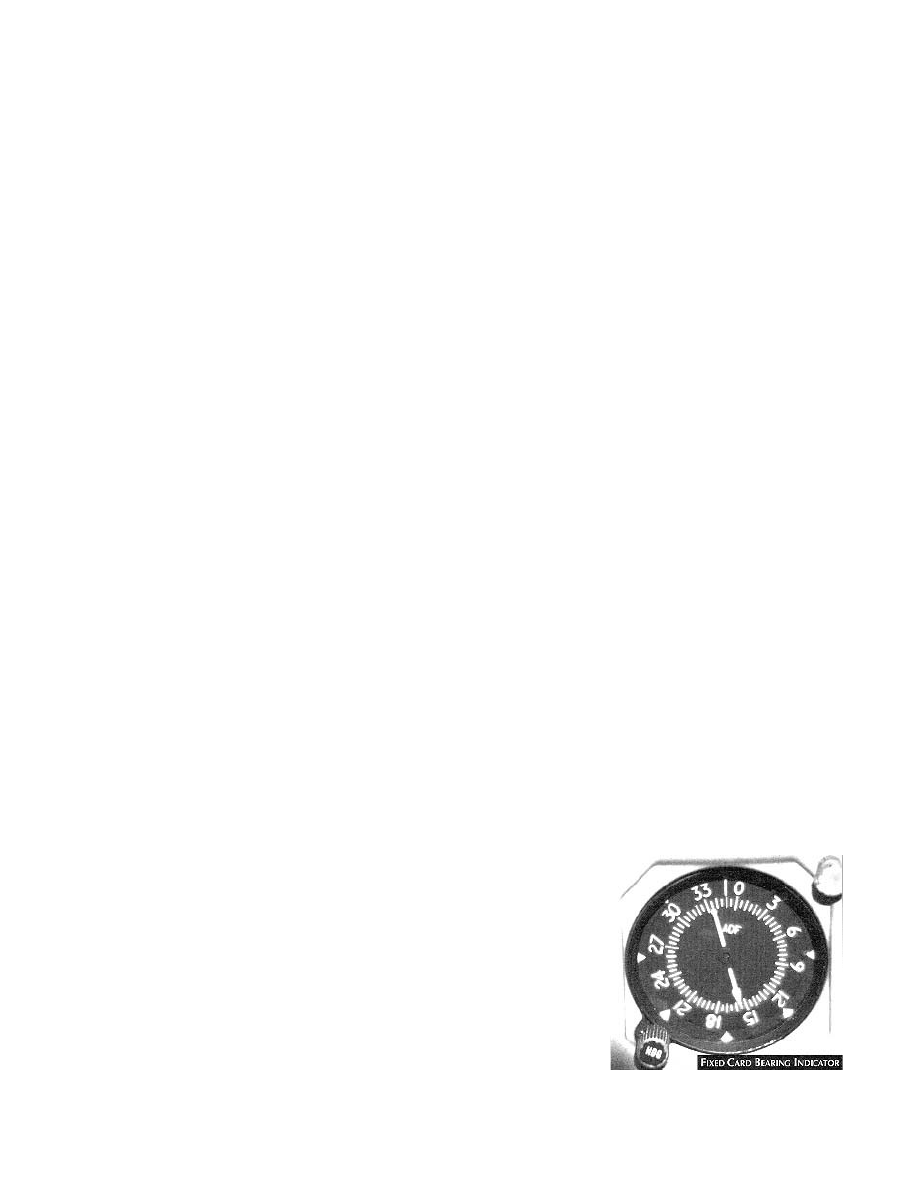
4. BEARING INDICATOR: As mentioned above, the bearing indicator
(see Fixed Card Bearing Indicator figure, on the right) displays the
bearing to the station relative to the nose of the aircraft. If the pilot is
flying directly to the station, the bearing indicator points to 0°. An ADF
with a fixed card bearing indicator always represents the nose of the
aircraft as 0° and the tail as 180°.
18
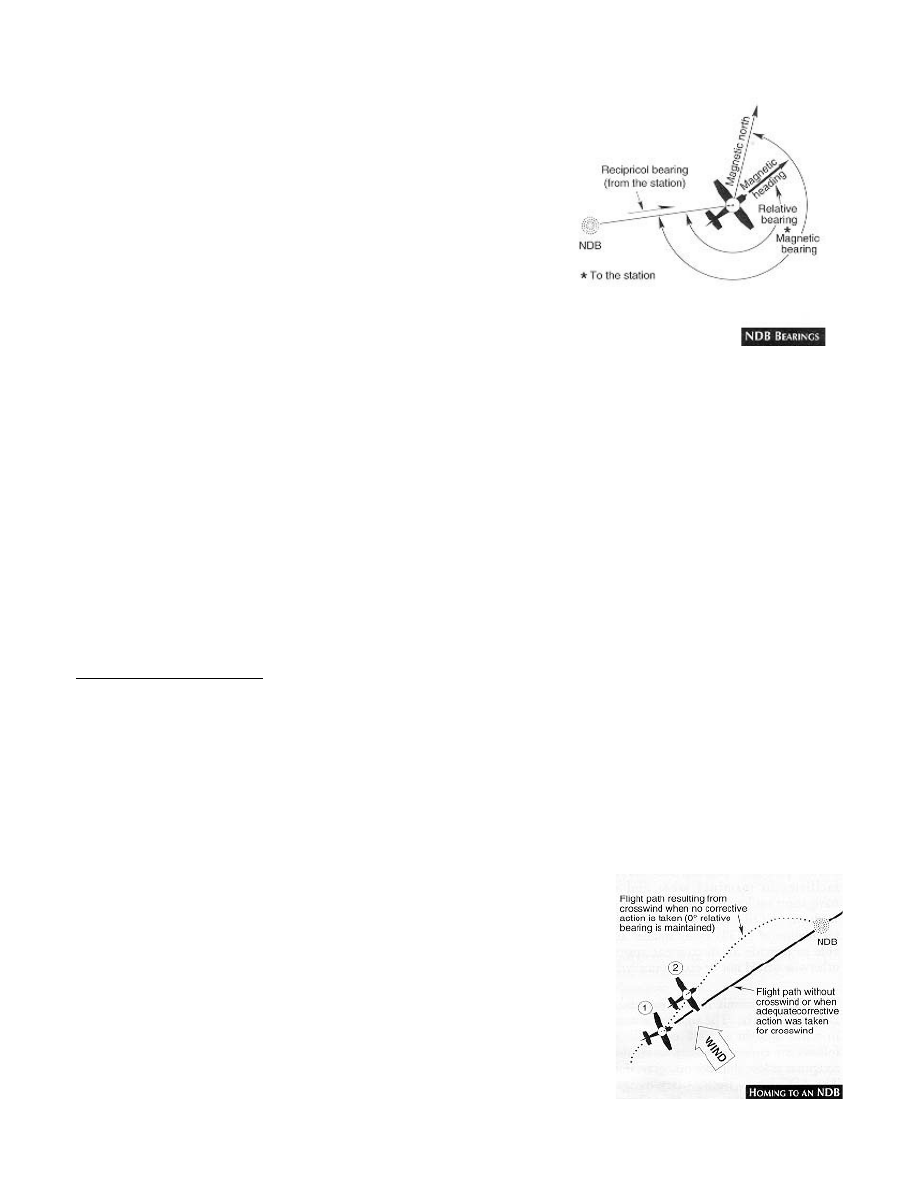
Relative bearing (see NDB Bearings figure, on the left) is the
angle formed by the intersection of a line drawn through the
centerline of the aircraft and a line drawn from the aircraft to the
radio station. This angle is always measured clockwise from the
nose of the aircraft and is indicated directly by the pointer on the
bearing indicator.
Magnetic bearing (see NDB Bearings figure, on the left) is the
angle formed by the intersection of a line drawn from the aircraft to
the radio station and a line drawn from the aircraft to magnetic
north. The pilot calculates the magnetic bearing by adding the
relative bearing shown on the indicator to the magnetic heading of
the aircraft. For example, if the magnetic heading of the aircraft is
40° and the relative bearing 210°, the magnetic bearing to the
station is 250°. Reciprocal bearing is the opposite of the magnetic bearing, obtained by adding or
subtracting 180° from the magnetic bearing. The pilot calculates it when tracking outbound and when
plotting fixes.
ADF OPERATIONS
1. MONITORING: Since the ADF receiver normally has no system failure or "OFF warning flags to
provide the pilot with immediate indication of a beacon failure or receiver failure, the ADF audio must be
monitored. The "idents" should be monitored anytime the ADF is used as a sole means of en route
navigation. During the critical phases of approach, missed approach and holding, at least one pilot or
flight crew member shall aurally monitor the beacon "idents" unless the aircraft instruments automatically
advise the pilots of ADF or receiver failure.
2. HOMING: One of the most common ADF uses is "homing to a station". When using this procedure,
the pilot flies to a station by keeping the bearing indicator needle on 0°
when using a fixed-card ADF (See Homing to an NDB figure, below
right). The pilot should follow these steps:
a. tune the desired frequency and identify the station. Set the
function selector knob to ADF and note the relative bearing;
b. turn the aircraft toward the relative bearing until the bearing
indicator pointer is 0°; and
c. continue flight to the station by maintaining a relative bearing of
0°.
19
The figure Homing to an NDB, on the right, shows that if the pilot must change the magnetic heading to
bold the aircraft on 0° the aircraft is drifting due to a crosswind. If the pilot does not make crosswind
corrections, the aircraft flies a curved path to the station while the bearing indicator pointer remains at
zero. The aircraft in position 2 must keep changing its heading to maintain the 0° relative bearing while
flying to the station.
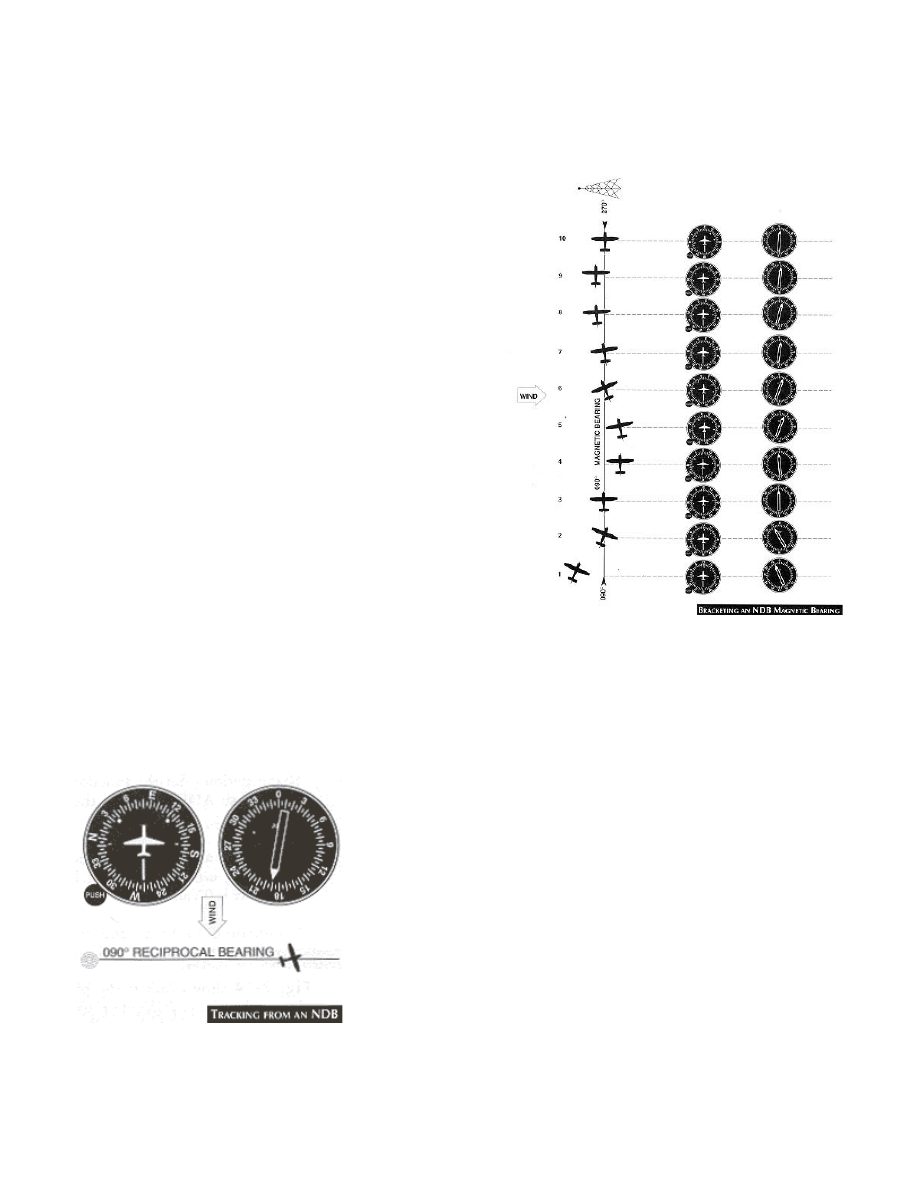
The bracketing method used here is basically the same as
that explained elsewhere. The major difference is that
bracketing a VOR requires the pilot to bracket a radial
identified by the TB needle, whereas bracketing an ADF
magnetic bearing requires the pilot to identify it by using
both the bearing indicator and the heading indicator.
Assume the pilot of the aircraft in position l (see
Bracketing an NDB Magnetic Bearing figure, on the
right) desires to intercept the 090° magnetic bearing to the
non-directional beacon. The pilot then sets up an intercept
angle of 30° which is shown by the 120° heading of the
aircraft. The ADF pointer indicates 340°. Because the
magnetic bearing equals the magnetic heading of the
aircraft and the relative bearing, the pilot adds 120° (the
relative bearing) and finds that the aircraft is on the 100°
magnetic bearing.
NOTE:
Whenever the aircraft heading and relative bearing equal more than
360° the pilot should subtract 360° from the resulting figure. The pilot
then follows the rest of the bracketing procedure.
3. TRACKING FROM A STATION: A pilot can use ADF to track from a station by employing the
principles of bracketing a magnetic bearing. The Tracking from an NDB figure, below left, illustrates an
aircraft tracking outbound from a station with a crosswind from the north. The reciprocal bearing is 090°,
and the pilot tracks this bearing by flying the aircraft with 10° of wind correction. The pilot knows that
the aircraft is tracking a reciprocal bearing because the heading
indicator (080°) and relative bearing (190°) equal the magnetic
bearing (270°).
4. POSITION FIX BY ADF: The ADF receiver can help the pilot to
make a definite position fix by using two or more stations and the
process of triangulation. To determine the exact location of the
aircraft, the pilot should use these procedures:
a. locate two stations in the vicinity of the aircraft. Tune and
identify each;
b. set the function selector knob to ADF, then note the
magnetic heading of the aircraft as read on the heading of
the aircraft as read on the heading indicator. Continue to fly
20

this heading and tune in the stations previously identified, recording the relative bearing for each
station;
c. add the relative bearing of each station to the magnetic heading to obtain the magnetic bearing.
Correct the magnetic bearing for east-west variation to obtain the true bearing; and
d.
plot the reciprocal for each true bearing on the chart. The aircraft is located at the intersection of
the bearing lines (see Position Fix by NDB figure, on the
right).
5. TIME COMPUTATION TO FLY TO A STATION: Computing
time to the station is basically the same for ADF as it is for VOR (refer
to Article 2.2.3. E (2)) therefore, a brief example is sufficient here. The
basic procedure is to:
a. turn the aircraft until the ADF pointer is either at 090°s or
270°s and note the time; and
b. fly a constant magnetic heading until the ADF pointer indicates
a bearing change of 10°. Note the time again and apply the
following formula:
(Time in seconds between bearing change)/(degrees of bearing change) equals time to station in minutes.
For example, if it takes 45 seconds to fly a bearing change of 10°, the aircraft is:
45 / 10 = 4.5 min from the station.
To find distance to a station multiply time by distance covered in one minute using TAS or preferably
G/S.
As with VOR procedures, a 10° bearing change is the simplest and easiest to use in making this
calculation. If the pointer moves so rapidly that a satisfactory time check cannot be obtained during a 10°
bearing change, this rapid movement indicates that the aircraft is very close to the station.
LIMITATIONS AND BENEFITS
Pilots using ADF should be aware of the following limitations:
Radio waves reflected by the ionosphere return to the earth 30 to 60 miles from the station and may cause
the ADF pointer to fluctuate. The twilight effect is most pronounced during the period just before and
after sunrise/sunset. Generally, the greater the distance from the station the greater the effect. The effect
can be minimized by averaging the fluctuation, by flying at a higher altitude, or by selecting a station with
a lower frequency (NDB transmissions on frequencies lower than 350 kHz have very little twilight effect).
Mountains or cliffs can reflect radio waves, producing a terrain effect. Furthermore, some of these slopes
may have magnetic deposits that cause indefinite indications. Pilots flying near mountains should use only
strong stations that give definite directional indications, and should not use stations obstructed by
mountains.
Shorelines can refract or bend low frequency radio waves as they pass from land to water. Pilots flying
over water should not use an NDB signal that crosses over the shoreline to the aircraft at an angle less
21

than 30°. The shoreline has little or no effect on radio waves reaching the aircraft at angles greater than
30°.
When an electrical storm is nearby, the ADF needle points to the source of lightning rather than to the
selected station because the lighting sends out radio waves. The pilot should note the flashes and not use
the indications caused by them.
The ADF is subject to errors when the aircraft is banked. Bank error is present in all turns because the
loop antenna which rotates to sense the direction of the incoming signal is mounted so that its axis is
parallel to the normal axis of the aircraft. Bank error is a significant factor during NDB approaches.
While the ADF has drawbacks in special situations, the system does have some general advantages. Two
of these benefits are the low cost of installation of NDBs and their relatively low degree of maintenance.
Because of this, NDBs provide homing and navigational facilities in terminal areas and en route
navigation on low-level airways and air routes without VOR coverage. Through the installation of NDBs
many smaller airports are able to provide an instrument approach that otherwise would not be
economically feasible.
The NDBs transmit in the frequency band of 200 to 415 kHz. The signal is not transmitted in a line of
sight as VHF or UHF, but rather follows the curvature of the earth; this permits reception at low altitudes
over great distances.
The ADF is used for primary navigation over long distances in remote areas of Canada.
22
Document Outline
- Low-frequency radio range
- VHF omnidirectional range
- Instrumentation
- Technical Specification
- CVOR
- The conventional signal encodes the station identifier, i(t), optional voice a(t), and navigation reference signal in, c(t), the isotropic (i.e. omnidirectional) component. The reference signal is encoded on an F3 subcarrier (color). The navigation variable signal is encoded by mechanically or electrically rotating a directional, g(A,t), antenna to produce A3 modulation (grayscale). Receivers (paired color and grayscale trace) in different directions from the station paint a different alignment of F3 and A3 demodulated signal.
- DVOR
- Accuracy and Reliability
- Constants
- Variables
- Using a VOR
Wyszukiwarka
Podobne podstrony:
adf report 2007
PNADD523 USAID SARi Report id 3 Nieznany
Ludzie najsłabsi i najbardziej potrzebujący w życiu społeczeństwa, Konferencje, audycje, reportaże,
REPORTAŻ (1), anestezjologia i intensywna terapia
Reportaż
Raport FOCP Fractions Report Fractions Final
reported speech
Reportaże telewizyjne
LF E CW13(1)
daily technical report 2012 10 03
Hydrostatics reportzaj
LF E CW43(1)
Reportaż- Gatunki dziennikarskie, magisterka, magisterka
EC08 Daily Report 18 July (Revision 1)
peace education report
więcej podobnych podstron