LABORATORIUM MECHANIKI EKSPERYMENTALNEJ
Instrukcja do ćwiczenia
RUCH PRECESYJNY GIROSKOPU
3
Cel ćwiczenia
Obserwacja zjawiska precesji regularnej. Badanie zależności prędkości kątowej precesji od momentu sił zewnętrznych.
Literatura
Do zrozumienia zjawisk giroskopowych potrzebne jest opanowanie podstawowych wiadomości z kinematyki i dynamiki ruchu kulistego ciała sztywnego. Należy zaznaczyć, że wiadomości ogólne, zawarte w niniejszej instrukcji, stanowią tylko niewielkie streszczenie teorii giroskopu. Dlatego, przed przystąpieniem do wykonywania ćwiczenia, trzeba przestudiować zagadnienie z poniżej proponowanych podręczników.
[1] J.Leyko, Mechanika ogólna, tom I, rozdz. XIV, tom II, rozdz. VII, rozdz. IX, rozdz. XII.
[2] A.Piekara, Mechanika ogólna, strony 158-167
[3] M.Łuno, A.Szaniawski, Zarys Mechaniki ogólnej, rozdz. 11, 12, 15,17, 20, 21.
[4] A.Januszajtis, Fizyka dla Politechnik, § 34, 35, 36.
[5] S.Szozeniowski, Fizyka doświadczalna, część I, rozdz; X.
Zagadnienia kontrolne
Stopień przygotowania się do ćwiczenia, pod względem opanowania potrzebnej wiedzy ogólnej, można sprawdzić, starając się odpowiedzieć na niżej podane pytania:
Co to jest ruch kulisty?
Co to jest kręt ciała (względem punktu i względem osi)?
Jaka jest treść zasady krętu?
Co to jest moment bezwładności ciała względem osi?
Co to są główne osie i główne momenty bezwładności?
Co to jest ruch precesyjny?
Co to jest precesja regularna?
Jaka jest zależność wektora prędkości kątowej precesji od wektora momentu sił
zewnętrznych?
Podstawy teoretyczne związane z przeprowadzanym eksperymentem
Giroskop to ciało sztywne, szybko wirujące dokoła swojej osi symetrii. Gdy r
moment główny M zewnętrznych sił, przyłożonych do giroskopu, jest równy zero, to na podstawie zasady krętu:
r
K
d
r
= M ,
(1)
dt
kręt giroskopu jest wektorem stałym ( K = const ) i oś obrotu giroskopu zachowuje swój r
kierunek w przestrzeni. Jeżeli moment główny M zewnętrznych sił nie jest równy zero, to giroskop porusza się tak, że tylko jeden jego punkt jest nieruchomy. Ruch giroskopu w tym przypadku można traktować jako ruch obrotowy dokoła osi chwilowej, przechodzącej przez ten nieruchomy punkt. Mamy tu do czynienia z ruchem kulistym giroskopu, a środek ruchu kulistego leży na osi symetrii i jest najczęściej punktem podparcia (np. przegub kulisty) giroskopu.
Równanie wektorowe (1) jest równoważne trzem równaniom skalarnym:
dK
dK
dK
x = M ,
y = M ,
z = M ,
(2)
x
dt
y
dt
z
dt
r
gdzie: M x , M , M - miary rzutów na osie układu współrzędnych momentu sił
y
M
z
zewnętrznych działających na giroskop,
r
K
K
x , K ,
- kręty względem osi x,y,z a zarazem miary rzutów krętu K na te osie.
y
z
Jeżeli osie x,y,z pokrywają się z głównymi osiami bezwładności ciała, to:
K = I ω , K = I ω , K = I ω
x
x
x
y
y
y
z
z
z
gdzie: I
ω ω ω
x , Iy, Iz - są głównymi momentami bezwładności ciała, a x ,
y ,
z to
składowe chwilowej prędkości kątowej ωr względem głównych osi bezwładności.
Oczywiście, jeśli:
ω ≠ ω
ω ≠ ω
ω ≠ ω
x
y
y
z
x
z
I ≠ I
I ≠ I
I ≠ I
x
y
x
z
y
z
to kierunek osi chwilowej, zgodny z kierunkiem wektora ωr , nie pokrywa się z żadną z r
głównych osi bezwładności ciała i nie pokrywa się także z kierunkiem K krętu ciała.
Dlatego w giroskopie, znajdującym się pod działaniem momentu sił zewnętrznych, konieczne jest rozróżnienie trzech prostych, przechodzących przez nieruchomy punkt (punkt podparcia giroskopu), a mianowicie:
1. kierunek chwilowej prędkości kątowej ω
r
,
r
2. kierunek krętu K ,
3. kierunek osi symetrii giroskopu.
Pierwsze dwa kierunki są niewidoczne w czasie ruchu giroskopu i zmieniają się w przestrzeni oraz względem samego giroskopu. Oś symetrii giroskopu jest widoczna i w czasie ruchu giroskopu zmienia swoje położenie tylko względem otaczającej przestrzeni.
W przybliżonej, elementarnej teorii ruchu giroskopu zakłada się, że kierunki r
wektorów K i ω
r
mało się różnią od kierunku osi symetrii i to w dowolnej chwili. Tak jest wtedy, gdy giroskop szybko obraca się dokoła osi symetrii pokrywającej się, np. z osią x. Wtedy:
ω >> ω , ω
>> ω
x
y
x
z
zatem, ω
r
ma kierunek mało różniący się od kierunku osi symetrii. Ponieważ Ix , Iy, Iz są tego samego rzędu i zazwyczaj:
I > I , I > I ,
x
y
x
z
r
to kierunek K będzi
z e
i blils
i ki
i kie
i ru
r nkowi
w
i osi
i x. Przy bard
r zo szybkim
i wi
w ro
r wa
w niu
gir
i o
r skopu dokoła
ł osi sym
y etriii we
w ktor
r chwilowej prędkości kątowe
w j
j i
i we
w kt
k o
t r
r krętu
prawie leżą na osi symetri
r ii.
i Dlatego można wnioskować o
o ruc
u h
c u
h
u chw
h ilow
o ej
j os
o i
obrotu obserwując ruc
u h
h os
o i sym
y etr
t ii giros
o kop
o u. Gdy
y nie
i ma momentu sił
r
r
r
zewnętrznych ( M =0),
) to
t
o z
z ró
r wnania (1) otrzymujemy: K = co
c n
o s
n t. Wtedy kręt K ,
prędkość kątowa ω
r
i oś
ś sy
s m
y e
m t
e r
t i
r ii
i gi
g r
i o
r s
o k
s o
k p
o u
p
u pozostają w
w pr
p z
r e
z s
e t
s r
t z
r e
z n
e i
n
i ni
n e
i r
e u
r c
u h
c o
h me i stałe
co do wielkości.
Dl
D a
l kró
r tk
t ot
o rw
r a
w łe
ł go
g dzi
z a
i ła
ł n
a ia
i si
s łi
ł ze
z wn
w ętr
t z
r n
z yc
y h (u
( d
u e
d rz
r e
z n
e ie
i )
) cza
z s ∆t jest bardzo
ma
m ł
a y
ł ,
y
, d
l
d a
l t
a e
t g
e o
g
o (
r
( ó
r w
ó n
w a
n n
a i
n e
i
e (
1
( )
1 )
)
) b
ędzie bardzo mały przyrost krętu:
r
r
∆ K = M t
∆
(3)
r
stąd małe będą zm
z ia
i n
a y
n
y kie
i ru
r nków
w w
w prze
z strz
r eni
i we
w ktoró
r w
w K i ω
r
i
i osi
i symetrii .
Gdy zewnętr
t z
r n
z e
n
e si
s łiy
ł
y dz
d i
z a
i ł
a a
ł j
a ą dł
d u
ł g
u o
g ,
o
, na
n we
w t
e
t wt
w e
t dy
d ,
y
, gd
g y
y ic
i h
c
h mo
m m
o e
m n
e t
n
t je
j s
e t
s
t niewielki,
r
kie
i r
e u
r n
u e
n k
k w
w prz
r e
z st
s rz
r e
z n
e i
n
i we
w kto
t ra
r K i wektora ω
r
i kierunek osi symetrii będą się
zmieniać. Ta
T k
a i
k
i r
u
r c
u h
c
h n
a
n z
a y
z w
y a
w
a s
i
s ę precesją.
Ni
N e
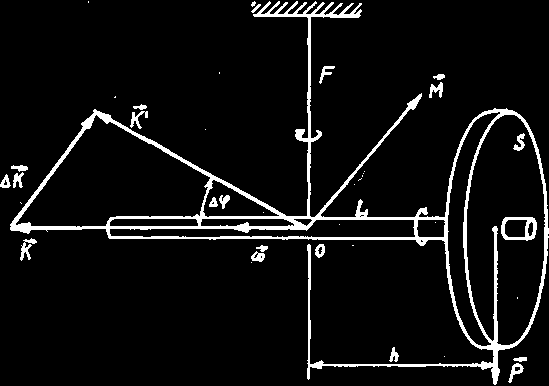
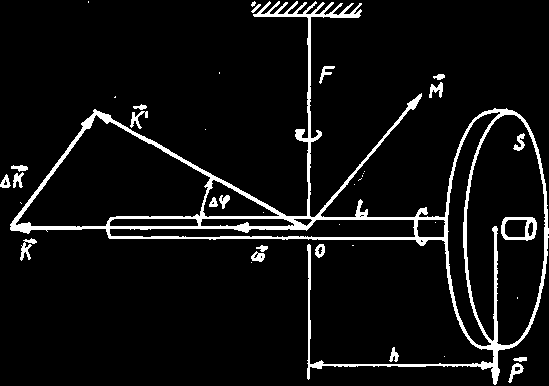
i ch giro
r skop ma postać je
j dnoro
r dnej
j tarc
r zy S (rys.1) szybko obracającej się
na pręci
c e
i
e L
L za
z w
a i
w e
i s
e z
s o
z n
o y
n m
y
m na
n
a ni
n c
i i
c
i F.
F
. Gd
G y
d
y na
n d
a a
d m
a y
m
y gi
g r
i o
r s
o k
s o
k p
o o
p w
o i
w
i ob
o ro
r t
o y
t
y i
i us
u t
s a
t w
a i
w m
i y
m
y je
j g
e o
g
o oś
poziomo, to zacznie się
ę on
o a
n
a ob
o r
b a
r c
a a
c ć w płaszczyźnie
i pozi
z o
i mej
e
j dokoła punktu
r
za
z wi
w e
i sze
z nia
i O. W om
o awi
w a
i nym
y prz
r yp
y adku
u na gi
g roskop działa moment M siły
r
ciężkości P (np. ciężar silniczka):
M = P ⋅ h
(4)
h jest odległością od punktu O do środka ciężkości giroskopu, a M modułem wektora momentu .
Rys.1.
r
Moment M jest prostopadły do płaszczyzny rysunku i skierowany od oczu patrzącego na rysunek. Jeżeli tarcza giroskopu szybko obraca się tak, jak zaznaczono na rysunku, to wektor
r
r
r
K′ = K + K
∆
tworzy kąt ϕ
∆ z wektorem K . Kąt ϕ
∆ leży w płaszczyźnie poziomej.
Wymuszony ruch giroskopu będzie odbywał się w płaszczyźnie poziomej, zgodnie z ruchem wskazówek zegara, jeśli patrzy się z góry. Łatwo sprawdzić, że gdy zmieni się kierunek obrotów tarczy giroskopu, płaszczyzna obrotu osi giroskopu pozostanie ta sama ale kierunek obracania osi będzie odwrotny, niż poprzednio. Kierunki odpowiednich wektorów są znane i dalej rozpatrywane będą tylko ich wartości.
Niech Ω oznacza prędkość kątową procesji, tzn. prędkość obracania się osi giroskopu pod działaniem stałego momentu sił zewnętrznych. W czasie ∆t przyrost krętu (rys.1) będzie wynosił:
∆
K
∆
∆ϕ
K = K ⋅ ϕ
∆
stąd
= K ⋅
.
t
∆
∆ t
Przechodząc do granicy, gdy ∆t->0, otrzymujemy:
dK
dϕ
= K ⋅
(5)
dt
dt
Prędkość kątowa precesji wynosi:
dϕ
Ω =
dt
dK
Ponieważ
= M i K = ω
I , ze wzoru (5) otrzymamy:
dt
dK
d
=
ϕ
K
= KΩ = M , M = Ω
ω
I
(6)
dt
dt
Przebieg ćwiczenia
Celem wykonywanych pomiarów jest wyznaczenie prędkości obrotowej wirnika giroskopu na podstawie wyprowadzonych zależności.
Przyrząd składa się z metalowego pręta (1) (rys.2) zawieszonego przegubowo na pionowym wałku (2) . Pręt (1) może obracać się dokoła osi poziomej i pionowej, które przechodzą przez jego środek. Na jednym końcu pręta jest umocowany silniczek (3).
Silniczek ten jest zasilany prądem trójfazowym (400 Hz, 36 V) poprzez trzy pierścienie (4) i blaszki kontaktowe (5). Zasilacz znajduje się w podstawie przyrządu.
Wirnik silniczka, obracając się z dużą prędkością kątową, jest właśnie giroskopem.
Na drugim ramieniu pręta (1) umieszcza się przeciw-wagę (6) silnika; jej położenie dobiera się tak, aby pręt (1) pozostawał w pozycji poziomej. Dodatkowy ciężarek (7) wytwarza moment siły zewnętrznej, wywołujący ruch precesyjny. Dla małego momentu będzie mała prędkość kątowa Ω precesji, a czas pełnego obrotu osi giroskopu będzie znaczny. W tym czasie może ujawnić się działanie momentu sił
tarcia w zawieszaniu (8) wałka (2) na belce (9); giroskop będzie w precesji także dokoła osi poziomej poprzecznej do pręta (1). Dlatego w zawieszeniu (8) powinny być dobre łożyska poprzeczno-wzdłużne. Wtedy, dla dwóch lub trzech obrotów precesyjnych, kąt między prętem (1) i pionem pozostanie, w przybliżeniu, prostym.
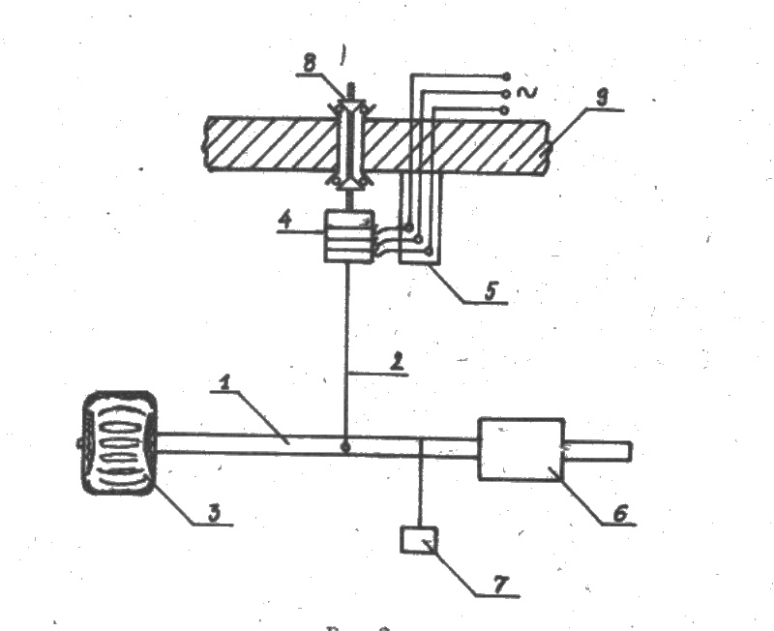
Rys.2.
Na wstępie, trzeba sprawdzić, czy pręt (1) może swobodnie obracać się dokoła pionowej i poziomej osi. Następnie ustala się położenie przeciwwagi (6) tak, aby pręt (1) pozostał w pozycji poziomej. Po włączeniu prądu, należy odczekać około 10
minut, aż wirnik silnika uzyska maksymalne obroty. Gdy silnik zacznie pracować na maksymalnych obrotach, przytrzymujemy pręt (1) i zawieszamy dodatkowy ciężarek (7). Wtedy ostrożnie puszcza się giroskop; rozpocznie się ruch precesyjny. Przy pomocy sekundomierza wyznacza się okres T pełnego obrotu precesyjnego giroskopu. Stąd prędkość kątowa precesji:
π
2
Ω =
(7 )
T
Ta prędkość odpowiada momentowi M, wytworzonemu przez ciężarek (7). Należy wyznaczyć prędkość kątową precesji dla różnych wartości momentu M, zmieniając wielkość i ramię siły ciężkości ciężarka (7).
Znając prędkość kątową precesji dla zadanego momentu siły można wyznaczyć prędkość kątową wirnika giroskopu ω z zależności:
M = Iω Ω
Należy przyjąć, że moment bezwładności wirnika giroskopu wynosi:
I = (168
, ± 0
,
1 )
5
−
2
⋅10 k gm
Po wykonaniu zadanej liczby pomiarów należy wyłączyć zasilanie silnika.
Okres ruchu precesyjnego dla niewielkich momentów siły może być bardzo długi. Z
powodu sił tarcia nie uda się wtedy zmierzyć nawet całego okresu ruchu. Należy tak dobrać masę ciężarka i ramię siły aby móc zmierzyć jeden okres ruchu.
Szczegółowe kroki przeprowadzonych pomiarów i sposób obliczenia wyników znajdują się w arkuszu sprawozdania.
Wyszukiwarka
Podobne podstrony:
CW3 INST
CW3 INST
PG cw3
cw3
cw3 rezystancja id 123348 Nieznany
cw3 odp
cw3 2014 notatki
LA cw3
cw3 9
korespondencja polecenia, Weterynaria Lublin, INFORMATYKA, cw3, cw2
inst pneumatyczna su-22 wnioski przemek, PWR [w9], W9, 5 semestr, aaaOrganizacja SEM5, Od sebka, Wyp
kl3 inst 02, Elektrotechnika, Downloads
SK-cw3 2h Konfigurowanie sieci WLAN, Sieci Komputerowe
PoradniMapa inst.prorodz., semestr II
szymikowski OPTO cw3 (ndkn)
ćw3 zmk
Ćw3 jak w kserówkach
więcej podobnych podstron