Zakład Napędów Wieloźródłowych
Instytut Maszyn Roboczych Ciężkich PW
Laboratorium Elektrotechniki i Elektroniki
Ćwiczenie E3 - protokół
Pomiar wielkości nieelektrycznych: temperatury,
przemieszczenia i prędkości.
Data wykonania ćwiczenia................................................................................
Zespół wykonujący ćwiczenie:
Nazwisko i imię ocena dop. do ć w.
1. .............................................................
......................
2. .............................................................
......................
3. .............................................................
......................
4. .............................................................
......................
5. .............................................................
......................
6. .............................................................
......................
7. .............................................................
......................
8. .............................................................
......................
9. .............................................................
......................
10. .............................................................
......................
Wydział SiMR PW
Rok ak. 20.../20...
Semestr...............
Grupa.................
Warszawa 2007r.
1.Cel i zakres ćwiczenia.
Celem ćwiczenia jest zapoznanie się z teorią dotyczącą elektrycznych pomiarów wielkości nieelektrycznych w zakresie zastosowania do pomiarów temperatury. W ćwiczeniu wykonuje się: skalowanie mierników temperatury, pomiary nagrzewania elementu radiatora i wyznaczanie jego izoterm.
Druga część ćwiczenia ma na celu poznanie metod i aparatury do pomiaru długości, odkształcenia, siły, naprężenia, momentu obrotowego, mocy, czasu, liczby obrotów, przepływu, przyspieszenia, wibracji, gęstości i lepkości. W ramach pomiaru długości prowadzi się badania przesunięć liniowych i kątowych. Do tego celu wykorzystuje się czujniki
pojemnościowe,
indukcyjne,
optoelektryczne,
mechaniczne
(pływakowe,
membranowe) itp.
W ramach ćwiczenia przeprowadzone będą badania małych i dużych przesunięć mechanicznych za pomocą indukcyjnych czujników różnicowych.
Trzecia część ćwiczenie ma na celu poznanie metod i aparatury do pomiaru prędkości obrotowej silników elektrycznych, spalinowych i obracających się elementów maszyn.
2.Pomiar temperatury.
2.1
Skalowanie wybranych przetworników pomiarowych.
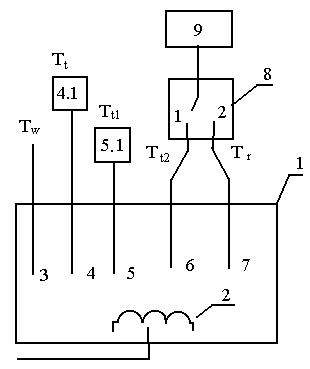
Rys.1. Zestaw pomiarowy do skalowania przetworników temperatury: 1 – termostat, 2 - grzejnik, 3 – termometr wzorcowy (Tw)˚C, 4 – termopara, 4.1 – miernik siły elektromotorycznej termopary (Tt)dz, 5 – termistor 1, 5.1 – miernik rezystancji termistora 1 (Tt1), 6 – termistor 2, 7 – czujnik rezystancyjny, 8 - przełącznik, 9 – techniczny mostek Wheatstone’a, w położeniu przełącznika 8.1. – pomiar Tt2 – [Ω], w położeniu przełącznika 8.2. – pomiar Tr – [Ω].
L.p. Tw
Tt
Tt1
Tt2
Tr
Uwagi
-
˚C
dz
˚C
Ω
Ω
-
1
Tw0
Tw0- : temperatura otoczenia
Na podstawie uzyskanych wyników wykonać wykresy: Tt, Tt1, Tt2, Tr, = f(Tw) w jednym układzie współrzędnych, we wnioskach omówić charakter krzywych.
3
2.2. Wyznaczanie szybkości narastania temperatury w radiatorze.
Całkowita energia cieplna doprowadzona do radiatora składa się z energii zmagazynowanej w nim, prowadzącej do wzrostu jego temperatury i energii cieplnej odprowadzonej do otoczenia. Przyrosty temperatury początkowo znaczne z upływem czasu maleją ponieważ oddawanie ciepła rośnie ze wzrostem temperatury radiatora. Po odpowiednim czasie ciepło dostarczone jest równe ciepłu odprowadzonemu. Czas ustalania się równowagi temperaturowej określony jest przez cieplną stałą czasową:
mc
τ =
,
S
α
gdzie: m – masa radiatora, c – ciepło właściwe materiału radiatora, α – współczynnik przenoszenia ciepła, s – przekrój przewodzący ciepło, jako tn=4 - 5τ a równanie przyrostów temperatury ma postać:
P
t
∆Τ =
−
1 ex −
p
α s
τ
gdzie: P – moc nagrzewania, t – czas nagrzewania.
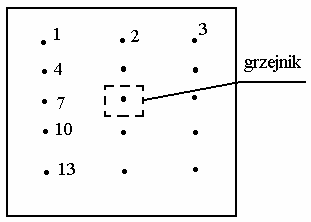
Rys.2. Radiator z naniesionymi punktami pomiarowymi.
Pomiary należy wykonać przetwornikiem termistorowym. W jednym z naniesionych
punktów poprawić odczyty wskazanej temperatury w równych odstępach czasu, podczas nagrzewania radiatora. Pomiary należy wykonywać do czasu w którym przyrosty temperatury staną się minimalne. Na podstawie wyników należy wykonać wykres ∆=f(t) oraz określić stałą czasową τ.
Pomiar szybkości nagrzewania radiatora Twt – wartość temperatury z wykresu Tt1=f(Tw) L.p. t
Tt1
Twt
∆
Uwagi
-
co 3 min ˚C
˚C
˚C
·
gdzie: ∆1=Twt2-Twt1, ∆2=Twt3-Twt2
4
2.3
Wyznaczenie izoterm radiatora.
W nagrzanym podczas poprzedniego pomiaru radiatorze pomierzyć przetwornikiem termistorowym temperatury w zaznaczonych punktach. Twt – wartość temperatury z wykresu Tt1=f(Tw).
L.p. Punkt pomiarowy Tt1 Twt Uwagi:
od 1 do 15
˚C ˚C -
Na podstawie uzyskanych wyników wykonać rysunek izoterm temperatury radiatora
3.Pomiary przesunięć.
Wyznaczanie charakterystyki podstawowej czujnika indukcyjnego o małym
i dużym przesunięciu liniowym.
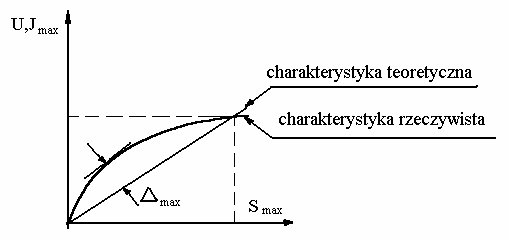
Charakterystykę podstawową czujnika z przetwornikiem określa się z zależności sygnału wyjściowego z przetwornika (napięcia lub prądu) w funkcji położenia rdzenia czujnika (zwory) U = f(s). Charakterystykę tę porównuje się z charakterystyką teoretyczną, która dla wartości maksymalnej sygnału wyjściowego określana jest jako liniowa i biegnie od początku układu współrzędnych. Następnie określa się błąd względny nieliniowości charakterystyki podstawowej (rzeczywistej) w stosunku do wartości teoretycznej. Największa wartość błędu względnego określa klasę przetwornika.
Rys.3. Przebiegi charakterystyki rzeczywistej i teoretycznej
5
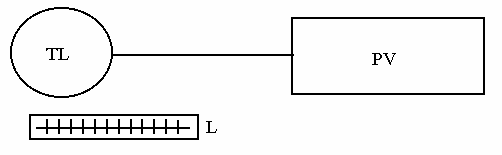
Połączyć układ w/g rys.
Rys.4. Układ pomiarowy: TL – badany czujnik indukcyjny, PV – przetwornik z woltomierzem( Hıtinger), L – liniał centymetrowy do optycznego określenia przesunięcia rdzenia czujnika.
3.1
Pomiary małych przesunięć.
S [%]
100
Ut [V]
Urz[V]
∆[%]
gdzie: δ – błąd względny nieliniowości
U [ V ] − U [ V ]
δ [%] =
rz
t
×100
U max
gdzie: Ut – wartość teoretyczna napięcia TL, Urz – rzeczywista wartość napięcia TL, Umax – maksymalna wartość teoretyczna TL, ∆=Urz[V] – Ut[V]
Na podstawie wyników pomiarów należy wykonać przebiegi Ut, Urz, δ w funkcji S
i określić maksymalny błąd nieliniowości.
3.2
Pomiary dużych przesunięć.
S [%]
100
Ut [V]
Urz[V]
δ[%]
Na podstawie wyników pomiarów należy wykonać przebiegi Ut, Urz, δ w funkcji S i określić maksymalny błąd nieliniowości.
4.
Pomiar prędkości.
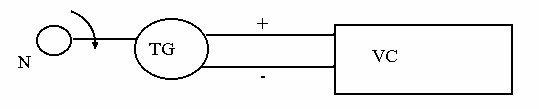
4.1 Wyznaczenie liniowości prądnicy tachometrycznej.
-
połączyć układ wg rys i zmieniając prędkość obrotową napędu wyznaczyć charakterystykę U=f(n) dla 10 punktów pomiarowych wg tabeli
Rys.5. Układ pomiarowy do badania prądnicy tachometrycznej: N – napęd z nastawianą prędkością
obrotową 0 - Uzn, TG – badana prądnica tachometryczn, VC – woltomierz cyfrowy.
6
U [ V ] − U [ V ]
δ [%] =
rz
t
× 100
U max
-
gdzie:δ – błąd względny nieliniowości, Ut – wartość teoretyczna napięcia TG, Urz – rzeczywista wartość napięcia TG, Umax – maksymalna wartość teoretyczna TG
n [%]
10
20
30
40
50
60
70
80
90
100
Ut [V]
Urz[V]
δ[%]
Na podstawie wyników pomiarów należy wykonać przebiegi Ut, Urz, δ w funkcji n i określić maksymalny błąd nieliniowości.
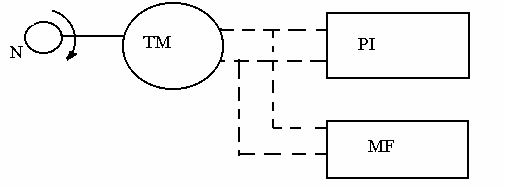
4.2 Wyznaczenie charakterystyki podstawowej czujnika magnetycznego.
Charakterystyka podstawowa określa zależności sygnału wyjściowego (napięcia, prądu, częstotliwości) w funkcji sygnału zadanego np. zmiany prędkości obrotowej. I z charakterystyki podstawowej wyznacza się błąd podstawowy, który charakteryzuje klasę dokładności mierników, czujników itp. wyznaczenie charakterystyki czujnika magnetycznego przeprowadza się w układzie pomiarowym przedstawionym na rys.
Rys.6. Układ pomiarowy do wyznaczania charakterystyki podstawowej czujników magnetycznych: N – napęd z nastawianą prędkością obrotową, PI – przetwornik impulsów na napięcie z wyświetlaniem cyfrowym, MF – miernik częstotliwości impulsów napięciowych, TM – czujnik magnetyczny
Cyfrowym miernikiem częstotliwości zlicza się liczbę impulsów w jednostce czasu - min dla różnych prędkości obrotowych z przedziału 10 – 100% nzn traktując je jako wzorcowe, a następnie porównuje się wskazania odczytane na przetworniku impulsów. Błąd względny określa się podobnie jak przy określaniu nieliniowości prądnicy tachometrycznej z tabeli i na podstawie niżej podanego wzoru, a następnie wykonuje się rysunki poszczególnych przebiegów
n [%]
10
20
30
40
50
60
70
80
90
100
nt [obr/min]
nrz[obr/min]
δn[%]
−
n
n
δ
=
rz
t ×
[%]
100
n
nmax
gdzie: δ – błąd względny podstawowy,nt – wartość odczytana na mierniku impulsów, nrz – rzeczywista wartość odczytana z przetwornika impulsów, nmax – maksymalna wartość prędkości obrotowej równa 100%n.
Wyszukiwarka
Podobne podstrony:
Wykład12 Sieć z protokołem X 25 i Frame Relay
Wykład10a Sieć z protokołem X 25 i Frame Relay
05 LAN Protokol IPid 5733 ppt
Protokół o zapobieganiu, zwalczaniu oraz karaniu handlu ludźmi
protokol2
PROTOKOL DYPLOMATYCZNY manulas MBak
II seria, Protokól 11ME wersjab
3 Wzm operacyjny protokol zima
ćw 10 tabelki do protokołu
Protokół sekcji zagadnienia
II seria, Protokól 2ME b
034 ROZ M I w sprawie wzoru protokołu obowiązkowej kontroli
protokol nr2
Protokoly 291004
chromatografia jonowymienna 2, Rok I, chemia fizyczna, chemia fizyczna-protokoły
Protokół końcowego odbioru robót, BUDOWNICTWO, potrzebne druki
protokol, Udostępnione, Chirurgia, Wykłady
Protokół wprowadzenia na roboty, Pliki DOC PPT
Protokół zdawczo - odbiorczy, Prawo
więcej podobnych podstron