
Projekt „Program Rozwojowy Potencjału Dydaktycznego Politechniki Świętokrzyskiej w Kielcach: kształcenie na miarę sukcesu”
Program Operacyjny Kapitał Ludzki Priorytet IV Działanie 4.1 Poddziałanie 4.1.1
Umowa UDA-POKL.04.01.01-00-175/08-03
Politechnika Świętokrzyska
25-314 Kielce
Al. Tysiąclecia Państwa Polskiego 7
Biuro Projektu - bud. A pok. 15
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Zadanie 9
Maszyny elektryczne – wykład multimedialny
Część IV
Autorzy:
Prof. dr hab. inż. Roman Nadolski
Dr inż. Jan Staszak
Dr inż. Krzysztof Ludwinek
Mgr inż. Zbigniew Gawęcki
Lata realizacji 2008-2011
SPIS TREŚCI
4. Maszyny synchroniczne
4.1. Budowa i zasada działania
4.2. Stan jałowy
4.3. Stan obciążenia
4.4. Stan zwarcia
4.5. Praca indywidualna prądnicy synchronicznej
4.5.1. Charakterystyka zewnętrzna prądnicy synchronicznej
4.5.2. Charakterystyka regulacji prądnicy synchronicznej
4.6. Moc i moment elektromagnetyczny maszyny synchronicznej
4.7. Praca na sieć sztywną
4.7.1. Synchronizacja prądnicy synchronicznej z siecią sztywną
4.7.2. Regulacja mocy maszyny synchronicznej współpracującej z siecią sztywną
5. Maszyny prądu stałego
5.1. Budowa i zasada działania
5.2. Układy połączeń obwodu elektrycznego
5.4.1. Silnik obcowzbudny i bocznikowy
4. MASZYNY SYNCHRONICZNE
4.1. BUDOWA I ZASADA DZIAŁANIA
Maszyna synchroniczna posiada stojan taki sam, jak maszyna indukcyjna, natomiast
wirnik ma postać elektromagnesu z biegunami jawnymi (maszyna jawnobiegunowa) lub
utajonymi (maszyna cylindryczna). Trójfazowe uzwojenie twornika, podobnie jak w silniku
indukcyjnym, umieszczone jest w żłobkach blachowanego stojana, zaś uzwojenie wzbudzenia
umieszczone w wirniku, zasilane jest prądem stałym. Konstrukcja jawnobiegunowa (rys.4.1)
jest stosowana z reguły w silnikach synchronicznych oraz w prądnicach wolnoobrotowych
napędzanych turbinami wodnymi (hydrogeneratorach).
W2
V2
U2
V1
U1
U2
U1
W1
V1
W2
V2
W1
Rys 4.1. Konstrukcja jawnobiegunowa maszyny synchronicznej
Wirniki maszyn synchronicznych o biegunach utajonych mają budowę cylindryczną (rys.
4.2). Wirniki takie są droższe i stosowane są w turbogeneratorach.
W1
U1
U2
V2
W2
V1
Rys 4.2. Konstrukcja cylindryczna maszyny synchronicznej
Układ elektryczny maszyny synchronicznej przedstawiono Na rys. 4.3a Trójfazowe
uzwojenie stojane jest połączone w gwiazdę, natomiast uzwojenie wzbudzenia umieszczone
w wirniku zasilane jest prądem stałym poprzez szczotki i dwa pierścienie ślizgowe
zamocowane na wale maszyny. Możliwa jest również konstrukcja odwrócona (rys. 4.3b), tzn.
trójfazowe uzwojenie twornika umieszczone jest w żłobkach blachowanego wirnika a
uzwojenie wzbudzenia nawinięte jest na wystających biegunach w stojanie. Taka maszyna ma
trzy pierścienie ślizgowe do których, podobnie jak w silniku indukcyjnym pierścieniowym,
przyłączone jest trójfazowe uzwojenie twornika. W maszynach synchronicznych uzwojenie
wzbudzenia może mieć również postać magnesu trwałego.
a)
S
R
T
─
+
1
2
3
4
b)
2
1
+
─
3
4
Rys 4.3. Układy elektryczne maszyny synchronicznej: a) jednofazowe uzwojenie wzbudzenia
umieszczone w wirniku, b) jednofazowe uzwojenie wzbudzenia umieszczone w stojanie (budowa
odwrócona).
W prądnicy synchronicznej wirnik obraca się ze stałą prędkością obrotową. Strumień
magnetyczny wytworzony przez uzwojenie wzbudzenia umieszczone w wirniku indukuje w
trójfazowym uzwojeniu stojana napięcie, którego przebieg czasowy zależy od rozkładu
indukcji magnetycznej w szczelinie powietrznej wzdłuż obwodu maszyny. Aby napięcie
indukowane w uzwojeniu twornika było sinusoidalną funkcją czasu, rozkład przestrzenny
indukcji wzdłuż obwodu maszyny powinien być sinusoidalny. Napięcia indukowane w trzech
uzwojeniach twornika rozmieszczonych na obwodzie względem siebie o 120° el. będą
tworzyć układ trójfazowy napięć.
Przy obciążeniu prądnicy synchronicznej odbiornikiem trójfazowym w uzwojeniu stojana
popłynie prąd, który wytworzy pole magnetyczne wirujące. W szczelinie powietrznej
powstanie wypadkowe pole magnetyczne, które indukuje w uzwojeniu stojana napięcie o
częstotliwości zależnej od liczby par biegunów oraz prędkości obrotowej wirnika
60
pn
f
(4.1)
gdzie: p – liczba par biegunów, n – prędkość obrotowa maszyny w obr/min
Uzwojenia stojana i wirnika powinny posiadać taką samą liczbę par biegunów. Moc
elektryczna wytwarzana przez prądnicę jest równoważona przez moc mechaniczną
doprowadzoną do wału maszyny.
Ta sama maszyna synchroniczna może pracować jako silnik synchroniczny. Wówczas
trójfazowe uzwojenie twornika wzbudzonej maszyny należy zasilić napięciem trójfazowym.
Prąd płynący w trójfazowym uzwojeniu twornika wytworzy pole magnetyczne wirujące z
prędkością synchroniczną zależną od liczby par biegunów oraz od częstotliwości sieci
p
f
n
s
(4.2)
gdzie: p – liczba par biegunów, ns – prędkość obrotowa maszyny w obr/min, f – częstotliwość
sieci w Hz
p
f
n
60
(4.3)
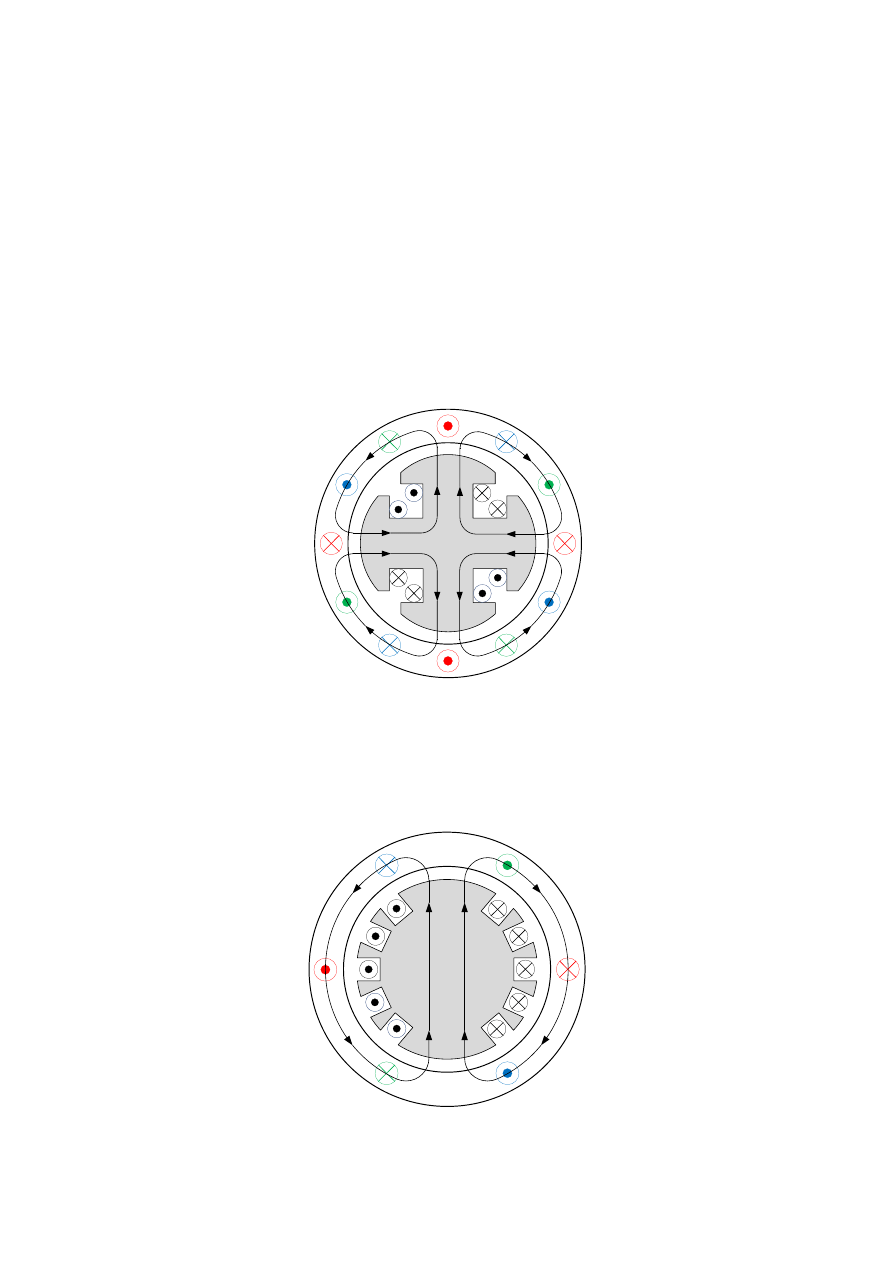
Pole wirujące wytworzone przez trójfazowe uzwojenie stojana można wyobrazić sobie jako
działanie wirującej pary biegunów w postaci dwóch magnesów (rys. 4.4.), natomiast
uzwojenie wzbudzenia można zastąpić również parą magnesów.
a)
N
S
S
N
F
F
n
1
n
1
b)
N
S
S
N
F
n
1
F
s
F
r
F
s
F
r
F
Rys 4.4. Model silnika synchronicznego a) nieobciążonego, b) obciążonego momentem
W nieobciążonej maszynie namagnesowany wirnik ustawi się w osi pola magnetycznego
stojana i wiruje zgodnie z tym polem z prędkością synchroniczną. Siły działające między
biegunami stojana i nieobciążonego wirnika mają kierunki promieniowe (rys. 4.4.a) i nie
wytwarzają żadnego momentu obrotowego. Przy obciążeniu wirnika momentem hamującym,
wirnik będzie opóźniał się względem pola wirującego stojana (rys. 4.4b). Wystąpi wówczas
moment elektromagnetyczny, który będzie równoważył moment mechaniczny hamujący.
Zarówno w stanie jałowym jak i przy obciążeniu mechanicznym wirnik obraca się ze stałą
prędkością, równą prędkości synchronicznej pola magnetycznego określonej zależnością (2).
4.2. STAN JAŁOWY
W stanie jałowym prądnicy synchronicznej strumień wzbudzenia
f
indukuje w uzwojeniu
twornika wartości chwilowe napięć
)
cos(
2
)
cos(
2
)
cos(
2
3
4
3
2
t
E
e
t
E
e
t
E
e
s
f
w
f
s
f
v
f
s
f
u
f
(4.4)
gdzie: E
f
– wartość skuteczna indukowanego napięcia,
s
– pulsacja sieci, przy czym
s
s
f
2
(4.5)
f
s
ws
s
f
f
k
N
E
2
(4.6)
gdzie: N
s
– liczba zwojów szeregowych uzwojenia stojana, k
ws
– współczynnik uzwojenia
stojana,
f
– strumień wzbudzenia
Uwzględniając zależność (4.2), wyrażenie (4.6) przyjmie postać
f
s
ws
s
f
pn
k
N
E
2
(4.7)
Korzystając z prawa przepływu oraz zakładając nieskończenie dużą przenikalność rdzenia
stojana i wirnika amplituda indukcji magnetycznej pola wzbudzenia wyraża się zależnością
p
N
I
B
f
f
m
f
2
0
(4.8)
Natomiast strumień wzbudzenia wyznacza się ze wzoru
l
B
p
m
f
f
2
(4.9)
lub po uwzględnieniu zależności(8)
l
p
N
I
p
f
f
f
2
2
0
(4.10)
Wstawiając wyrażenie (4.10) do wzoru (4.7), otrzymuje się zależność na wartość skuteczną
napięcia indukowanego w funkcji prądu wzbudzenia
f
s
f
s
f
ws
s
p
f
I
kn
I
n
N
k
N
l
E
0
2
(4.11)
Zależność napięcia E
f
indukowanego w uzwojeniu twornika przez strumień wzbudzenia
f
od
prądu wzbudzenia I
f
przy prądzie twornika I=0 oraz przy stałej prędkości obrotowej n
s
=const.
nazywamy charakterystyką biegu jałowego (rys. 4.5.).
E
f
I
f
U
N
I
foN
Rys 4.5. Charakterystyka biegu jałowego
Przy pominięciu nasycenia rdzenia charakterystyka ta będzie zależnością liniową. W
rzeczywistej maszynie zależność między strumieniem wzbudzenia a prądem wzbudzenia
będzie zależnością nieliniową przedstawiającą charakterystykę magnesowania B=f(H) dla
środowisk ferromagnetycznych. A tym samym charakterystyka biegu jałowego E
f
=f(I
f
) będzie
zależnością nieliniową. Prąd wzbudzenia I
f0N
, przy którym napięcie na zaciskach twornika w
stanie jałowym ma wartość znamionową U
N
nazywamy znamionowym prądem wzbudzenia
stanu jałowego.
Sprzężenie strumienia wzbudzenia z uzwojeniem twornika, w przypadku gdy oś
uzwojenia twornika danej fazy pokrywa się z osią biegunów wzbudzenia wynosi
f
f
ws
s
p
f
ws
s
fad
I
p
N
k
N
l
k
N
2
2
0
(4.12)
Natomiast amplituda indukcyjności wzajemnej między uzwojeniem twornika a uzwojeniem
wzbudzenia wyznacza się z zależności
p
N
k
N
l
I
L
f
ws
s
p
f
fad
fad
2
2
0
(4.13)
Z zależności (4.13) wynika, że indukcyjność L
fad
jest proporcjonalna do liczby zwojów N
s
twornika i N
f
wzbudzenia oraz odwrotnie proporcjonalna do grubości szczeliny powietrznej .
a)
W1
U1
U2
V2
W2
V1
F
f
S
N
b)
W1
U1
U2
V2
W2
V1
F
ad
c)
i
u
oś cza
su
i
w
i
v
Rys 4.6. Obraz pola magnetycznego maszyny synchronicznej przy zasileniu a) tylko uzwojenia
wzbudzenia, b) tylko uzwojenia twornika dla układu prądów jak na rys. c), c) wykres wskazowy
prądów fazowych twornika
F
s
Rys 4.7. Obraz strumienia rozproszenia twornika
4.3. STAN OBCIĄŻENIA
W stanie obciążenia w uzwojeniu twornika płynie prąd twornika I, który wytwarza
własny strumień magnetyczny
ad
zwany strumieniem oddziaływania twornika. Strumień ten
zamyka się wzdłuż tej samej drogi magnetycznej co strumień wzbudzenia
f
i ma działanie
rozmagnesowujące. Strumień ten indukuje w uzwojeniu twornika napięcie o wartości
skutecznej E
ad
I
X
k
N
f
f
E
ad
ad
ws
s
s
ad
s
ad
2
2
(4.14)
Wielkość X
ad
nazywamy reaktancją oddziaływania twornika.
Indukcję oddziaływania twornika wyznacza się z prawa przepływu
ad
ad
B
0
(4.15)
gdzie:
ad
– amplituda przepływu oddziaływania twornika, przy czym
I
p
k
N
m
ws
s
s
ad
2
2
4
2
(4.16)
Uwzględniając zależność (4.16), otrzymuje się
I
p
k
N
m
B
ws
s
s
ad
2
2
4
2
0
(4.17)
Strumień oddziaływania twornika sprzężony z uzwojeniem twornika wynosi
ad
ws
s
ad
k
N
(4.18)
gdzie:
ad
– strumień oddziaływania twornika, przy czym
l
B
p
ad
ad
2
(4.19)
Uwzględniając zależność (4.17) i (4.19) strumień oddziaływania twornika przyjmie postać
I
p
k
N
l
m
ws
s
p
s
ad
2
0
2
)
(
2
2
(4.20)
Podstawiając wyrażenie (4.20) do wzoru (4.14), otrzymuje się zależność Na reaktancję
oddziaływania twornika
p
k
N
l
f
m
X
ws
s
p
s
s
ad
2
0
)
(
4
(4.21)
Reaktancja oddziaływania twornika jest proporcjonalna do kwadratu liczby zwojów
uzwojenia twornika oraz odwrotnie proporcjonalna do grubości szczeliny powietrznej. Im
większa szczelina powietrzna tym mniejsza jest reaktancja oddziaływania twornika.
Oprócz strumienia oddziaływania twornika prąd twornika wytwarza strumień rozproszenia
s
, który sprzęga się wyłącznie z własnym uzwojeniem.
Strumień rozproszenia
s
indukuje w uzwojeniu twornika napięcie
I
X
k
N
f
E
s
s
ws
s
s
s
2
(4.22)
Wielkość X
s
we wzorze (4.22) nazywamy reaktancją rozproszenia.
Stan obciążenia maszyny synchronicznej można traktować jako rezultat działania
strumienia wzbudzenia
f
i strumienia oddziaływania twornika
ad
. W wyniku
współdziałania obu strumieni powstaje wypadkowy strumień , który indukuje w uzwojeniu
twornika napięcie E =E
f
– E
ad
. Oprócz indukowanych w uzwojeniu twornika napięć E
f
, E
ad
,
E
s
występuje również spadek napięcia Na rezystancji twornika U
R
I
R
U
s
R
(4.23)
gdzie: R
s
- rezystancja twornika
Napięcie indukowane na zaciskach uzwojenia twornika będzie zatem równe
RI
I
jX
I
jX
E
U
E
E
E
U
s
ad
f
R
s
ad
f
(4.24)
Reaktancję
s
ad
d
X
X
X
(4.25)
nazywamy reaktancją synchroniczną. Uwzględniając wyrażenie (4.25) równanie (4.24) można
zapisać w postaci
RI
I
jX
E
U
d
f
(4.26)
W maszynach synchronicznych dużej mocy można pominąć spadek napięcia Na rezystancji
twornika i wówczas wyrażenie (4.26) przyjmie postać
I
jX
E
U
d
f
(4.27)
Równaniom (4.26) i (4.27) odpowiadają schematy zastępcze przedstawione na rys 4.8.
a)
R
X
s
X
ad
E
E
f
I
I
I
U
R
=jRI
E
ad
=jX
ad
I
E
s
=jX
s
I
b)
X
d
E
f
U
I
I
E
d
=jX
d
I
Rys 4.8. Schemat zastępczy maszyny synchronicznej a) pełny, b) uproszczony.
Na podstawie schematu zastępczego można sporządzić wykres wektorowy dla zadanego
prądu obciążenia i charakteru odbiornika, charakteryzowanego kątem przesunięcia fazowego
między napięciem a prądem twornika. Na rys. 4.9 przedstawiono wykresy wektorowe
maszyny synchronicznej dla różnych rodzajów obciążeń maszyny synchronicznej. Na
powyższych wykresach kąt nazywamy kątem wewnętrznego przesunięcia fazowego
między prądem I a napięciem indukowanym E
f
, a kąt między napięciem U na zaciskach
maszyny a napięciem indukowanym E
f
nazywamy kątem mocy.
a)
jj
y
j
J
jX
d
I
E
f
U
I
b)
y=J
E
f
U
I
jX
d
I
c)
J
U
I
jX
d
I
j
y
E
f
d)
E
f
U
I
jX
d
I
y=j
J=0
e)
E
f
U
I
jX
d
I
y=j
J=0
Rys. 4.9. Wykresy wektorowe maszyny synchronicznej dla różnych rodzajów obciążeń:
a) obciążenie rezystancyjno-indukcyjne, a) obciążenie rezystancyjne,
c) obciążenie rezystancyjno-pojemnościowe, d) obciążenie indukcyjne,
e) obciążenie pojemnościowe.
4.4. STAN ZWARCIA
Stanem zwarcia prądnicy synchronicznej nazywamy taki stan w którym zaciski uzwojenia
twornika są zwarte. Na rys. 4.10 przedstawiono schemat zastępczy maszyny w stanie
zwarcia, natomiast Na rys. 4.11 przedstawiono wykres wektorowy maszyny synchronicznej.
a)
R
X
s
X
ad
E
E
f
I
I
I
U
R
=jRI
E
ad
=jX
ad
I
E
s
=jX
s
I
U=0
b)
X
d
E
f
U=0
I
I
E
d
=jX
d
I
Rys. 4.10. Schemat zastępczy maszyny synchronicznej w stanie zwarcia ; a) schemat pełny,
b) schemat uproszczony przy R
s
=0.
a)
E
f
I
jX
s
I
y=j
J=0
jX
ad
I
F
f
F
ad
F
b)
E
f
I
y=j
J=0
jX
d
I
Rys 4.11.
Wykres wektorowy maszyny synchronicznej w stanie zwarcia
Prąd twornika w stanie zwarcia, wyznaczony na podstawie schematu zastępczego (rys. 4.10)
wynosi
2
2
d
s
f
X
R
E
I
(4.28)
Uwzględniając zależność (4.11) oraz uwzględniając, że
d
s
d
s
d
L
pn
L
f
X
2
2
(4.29)
wzór (4.28) przyjmie postać
2
2
2
2
)
2
(
d
s
s
f
s
d
s
f
L
pn
R
I
kn
X
R
E
I
(4.30)
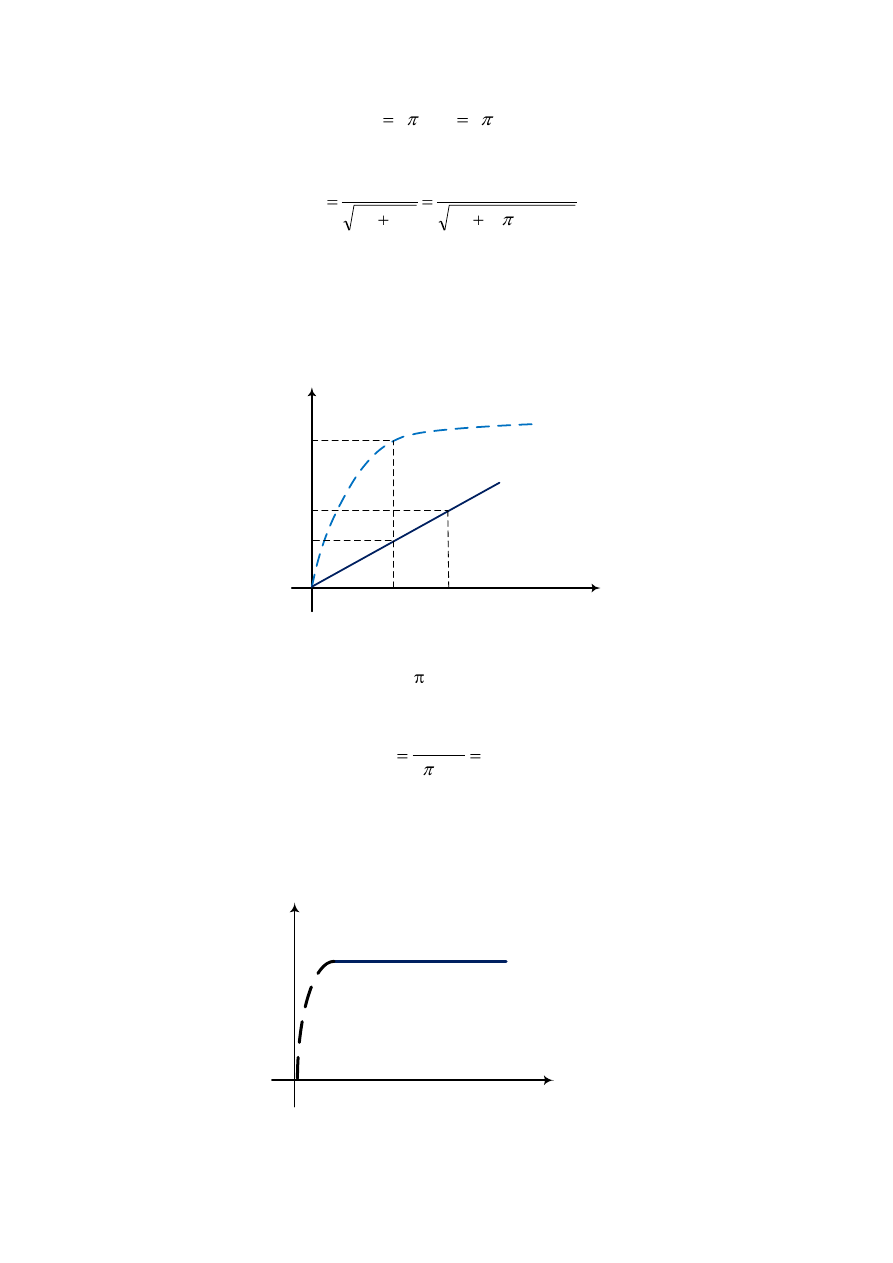
Charakterystyką zwarcia (rys. 4.12) nazywamy zależność prądu twornika I od prądu
wzbudzenia I
f
przy symetrycznym zwarciu zacisków twornika oraz przy prędkości obrotowej
n
s
= const. Ze wzoru (4.30) wynika, że zależność prądu twornika od prądu wzbudzenia przy
stałej prędkości obrotowej jest zależnością liniową.
I
N
U
N
I
Z
I
f0N
I
fZN
I
f
E
f
I
Z0
E
f
I
Z
Rys 4.12.
Charakterystyka zwarcia maszyny synchronicznej
Przy prędkości znamionowej R
s
<< 2 f
s
L
d
i wyrażenie (4.30) na prąd zwarcia przyjmie
postać
f
d
f
cI
pL
kI
I
2
(4.31)
A więc prąd zwarcia praktycznie nie zależy od prędkości obrotowej maszyny z wyjątkiem
bardzo małych prędkości, przy których rezystancja twornika nie może być pominięta (rys.
4.13)
I
n
U=0
I
f
=const
Rys 4.13. Zależność prądu zwarcia od prędkości obrotowej.
Prąd wzbudzenia I
fzN
, przy którym prąd twornika w stanie zwarcia ma wartość znamionową
I
N
, nazywamy znamionowym prądem wzbudzenia stanu zwarcia.
Na podstawie charakterystyki biegu jałowego i charakterystyki zwarcia (rys 4.12)
określa się stosunek zwarcia. Stosunek zwarcia jest to stosunek znamionowego prądu
wzbudzenia w stanie jałowym do znamionowego prądu wzbudzenia przy zwarciu.
N
z
f
N
f
z
I
I
k
0
(4.32)
Jak wynika z rys 4.12, stosunek zwarcia może być wyrażony poprzez prądy twornika
N
z
z
I
I
k
0
(4.33)
gdzie prąd I
z0
odpowiada prądowi wzbudzenia I
f0N
a znamionowy prąd twornika I
N
odpowiada
prądowi wzbudzenia I
fzN
. Prąd twornika I
z0
można wyznaczyć na podstawie schematu
zastępczego (rys. 4.10b)
d
N
d
f
z
X
U
X
E
I
0
(4.34)
Podstawiając zależność (4.34) do wyrażenia (4.33), otrzymuje się
dr
N
d
d
N
N
z
X
Z
X
X
I
U
k
1
1
(4.35)
gdzie: Z
N
– impedancja znamionowa, X
dr
–wartość względNa reaktancji synchronicznej, przy
czym
N
d
dr
Z
X
X
N
N
N
I
U
Z
(4.36)
A więc stosunek zwarcia jest równy odwrotności względnej reaktancji synchronicznej.
Ponieważ reaktancja synchroniczna zależy głównie od reaktancji oddziaływania twornika a ta
zgodnie z zależnością (4.21) zależy od grubości szczeliny powietrznej między stojanem a
wirnikiem. Dlatego szczelina powietrzna posiada istotny wpływ na wartość stosunku zwarcia.
Im większa jest grubość szczeliny tym stosunek zwarcia jest większy. Wartość stosunku
zwarcia zawiera się w granicach k
z
= 0.5 1.5, przy czym mniejsze wartości odnoszą się do
dużych maszyn cylindrycznych, zaś większe wartości do małych maszyn jawnobiegunowych.
Stosunek zwarcia jest wielkością charakteryzującą wiele podstawowych własności maszyn
synchronicznych, takich jak zmienność napięcia, przeciążalność, krotność prądu zwarcia
.
4.5. PRACA INDYWIDUALNA PRĄDNICY SYNCHRONICZNEJ
Praca indywidualna prądnicy synchronicznej występuje wtedy, gdy prądnica na zaciskach
twornika jest bezpośrednio obciążona odbiornikiem o określonym współczynniku mocy. Kąt
przesunięcia fazowego między napięciem na zaciskach maszyny i prądem twornika
(obciążenia) jest określony rodzajem odbiornika (stosunkiem jego reaktancji do rezystancji).
Przy danym prądzie obciążenia o wartości napięcia decyduje wartość prądu wzbudzenia,
natomiast wartość częstotliwości napięcia zależy od prędkości obrotowej z jaką napędzana
jest prądnica.
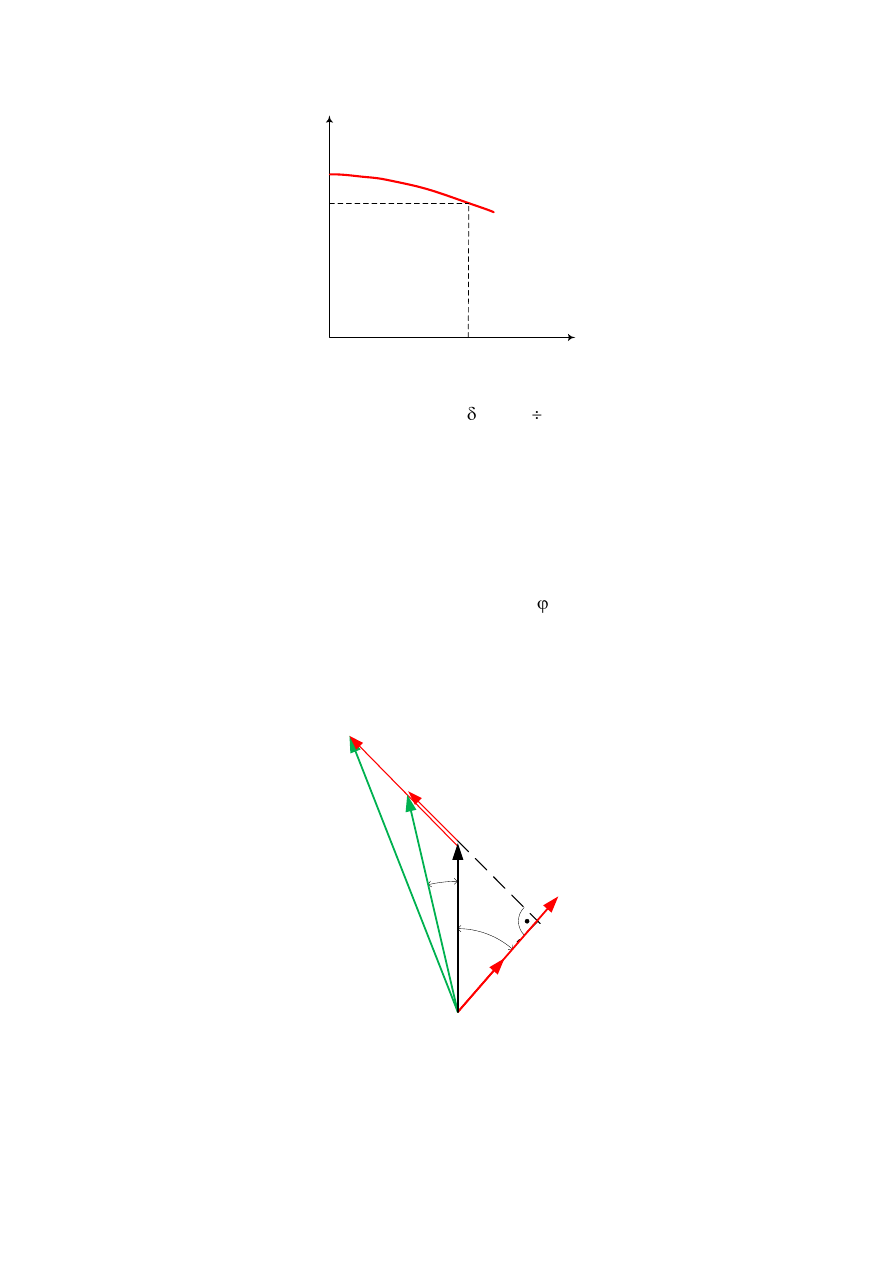
4.5.1. CHARAKTERYSTYKA ZEWNĘTRZNA PRĄDNICY SYNCHRONICZNEJ
Charakterystyką zewnętrzną prądnicy synchronicznej nazywa się zależność napięcia U na
zaciskach twornika od prądu twornika (obciążenia) I przy prądzie wzbudzenia I
f
= const. oraz
przy stałym współczynniku mocy cos = const. i przy stałej prędkości obrotowej n
s
= const.
Przebieg charakterystyki zewnętrznej U = f( I ) można wyznaczyć na podstawie wykresu
wektorowego (rys 4.14.).
E
f
I
E
f
II
E
f
III
I
I
E
f
=U
0
J
I
j
U
I
U
II
U
III
I
III
I
II
jX
d
I
I
Rys 4.14. Wykres wektorowy do wyznaczenia charakterystyki zewnętrznej prądnicy
synchronicznej.
Przy obciążeniu indukcyjnym (cos
i
=0) napięcie na zaciskach twornika U i napięcie
indukowane E
f
są w fazie, wobec czego
d
f
X
E
U
I
(4.37)
Podobnie jest przy obciążeniu pojemnościowym
d
f
X
U
E
I
(4.38)
Na rys. 4.15. przedstawiono charakterystyki zewnętrzne prądnicy synchronicznej dla
różnych współczynników mocy. Przy obciążeniu indukcyjnym lub pojemnościowym
(cos =0) zależność U = f(I) jest zależnością liniową. Dla stanu jałowego (I =0) ustala się
prądem wzbudzenia I
f
, napięcie U
0
na zaciskach twornika. Podczas obciążania prądnicy prąd
wzbudzenie pozostaje niezmieniony. Dla stanu zwarcia prąd twornika I=I
z
jest określony
wzorem
d
f
z
X
E
I
(4.39)
a)
cos
f =
1
cos
f
L
=0
RC
U
R
RL
I
I
Z
U
0
cos
f
C
=0
L
b)
RC
U
R
RL
I
I
N
U
0
Rys 4.15.
Charakterystyki zewnętrzne prądnicy synchronicznej.
Zmiennością napięcia prądnicy synchronicznej nazywa się wzrost napięcia w stosunku do
napięcia znamionowego, występujący przy odciążeniu prądnicy od pracy znamionowej do
stanu jałowego, przy zachowaniu znamionowej prędkości obrotowej i znamionowego prądu
wzbudzenia. Znamionowym prądem wzbudzenia nazywa się wartość prądu wzbudzenia, przy
którym występuje znamionowe napięcie na zaciskach twornika dla znamionowego prądu
obciążenia. Zmienność napięcia określa się na podstawie charakterystyki zewnętrznej (rys.
4.16.) i wyznacza się ze wzoru
N
N
U
U
U
u
0
(4.40)
U
I
I
N
U
0
U
N
Rys 4.16.
Określenie zmienności napięcia
Zmienność napięcia zawiera się w granicach u = 0.4 0.5, przy czym większe wartości
odnoszą się do maszyn cylindrycznych.
4.5.2. CHARAKTERYSTYKA REGULACJI PRĄDNICY SYNCHRONICZNEJ
Charakterystyką regulacji prądnicy synchronicznej nazywa się zależność prądu
wzbudzenia I
f
od prądu twornika (obciążenia) I przy stałej wartości napięcia na zaciskach
twornika U oraz przy stałym współczynniku mocy cos =const. i przy stałej prędkości
obrotowej n
s
=const.
Przebieg charakterystyki zewnętrznej I
f
= f(I) można wyznaczyć na podstawie wykresu
wektorowego (rys. 4.17.).
E
f
I
E
f
II
I
I
J
I
j
U
I
II
jX
d
I
I
jX
d
I
II
Rys 4.17. Wykres wektorowy do wyznaczenia charakterystyki regulacji prądnicy synchronicznej
Na rys 4.18. przedstawiono charakterystyki regulacji prądnicy synchronicznej dla różnych
współczynników mocy.
RL
RC
I
I
f
R
I
f
Rys 4.18. Charakterystyki regulacji prądnicy synchronicznej
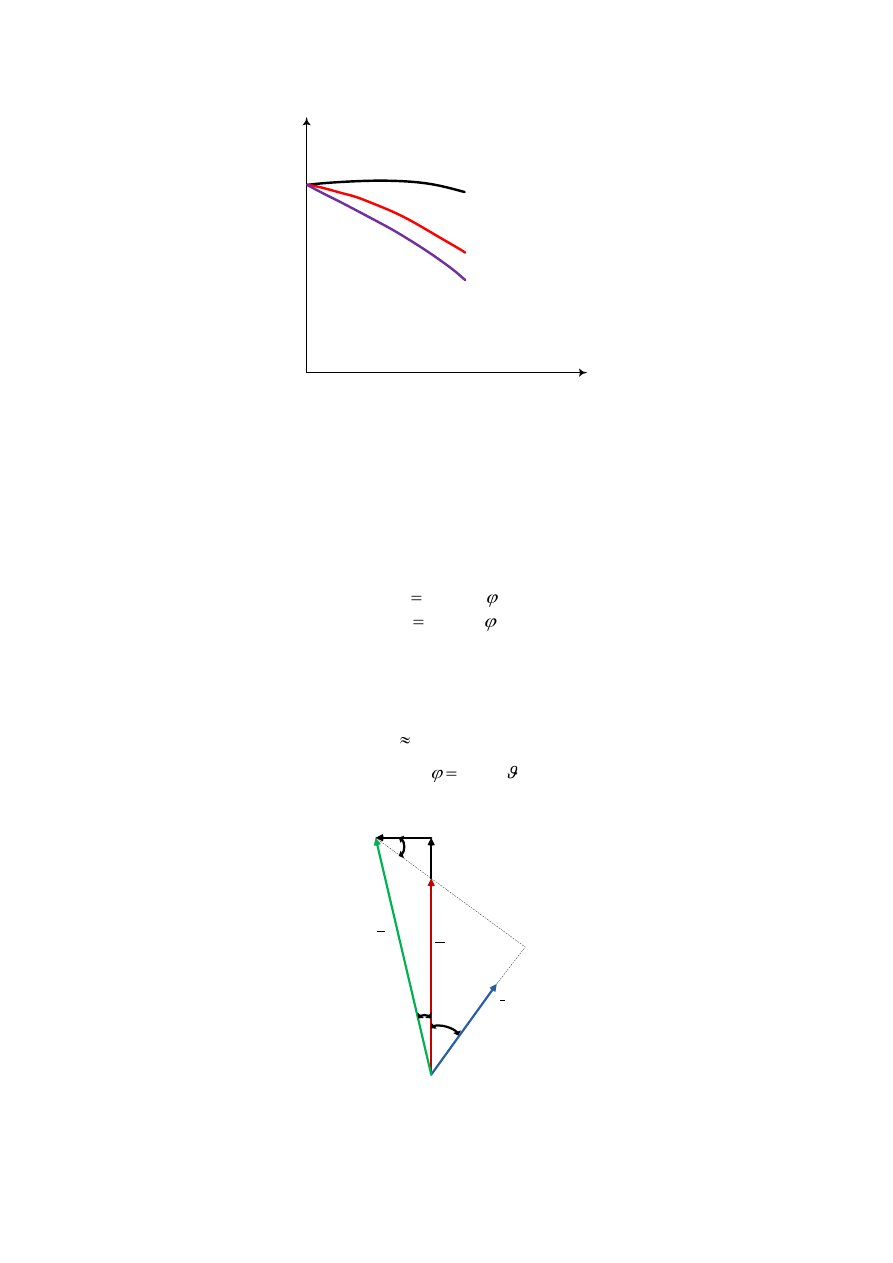
4.6. MOC I MOMENT ELEKTROMAGNETYCZNY MASZYNY SYNCHRONICZNEJ
Moc czynną P oraz moc bierną Q oddawaną przez prądnicę synchroniczną do sieci lub
pobieraną przez silnik wyznacza się ze wzoru
cos
mUI
P
(4.41)
sin
mUI
Q
(4.42)
gdzie: m – liczba faz stojana (dla prądnicy trójfazowej m = 3), U – napięcie fazowe prądnicy,
I – prąd fazowy twornika
Na podstawie wykresu wektorowego (rys. 4.19.) dla maszyny synchronicznej cylindrycznej,
przy pominięciu rezystancji twornika R
s
0, można napisać zależność
sin
cos
f
d
E
I
X
(4.43)
jjj
J
X
d
Icos
j
=cP
E
f
U
I
X
d
Icos
j
=cQ
j
Rys. 4.19. Uproszczony wykres wektorowy prądnicy synchronicznej do określenia mocy czynnej
Uwzględniając zależność (4.43) wyrażenie na moc czynną (4.41) przyjmie postać
sin
d
f
X
UE
m
P
(4.44)
Zakładając, że moc mechaniczna pobierana na wale maszyny jest równa mocy czynnej
oddawanej do sieci (przy pominięciu strat w rdzeniu i uzwojeniu stojana),
elektromagnetyczny moment obrotowy wyznacza się z zależności
sin
d
f
s
s
e
X
UE
m
P
T
(4.45)
gdzie:
s
– mechaniczna prędkość kątowa synchroniczna, przy czym
s
s
n
30
(4.46)
gdzie: n
s
– prędkość obrotowa synchroniczna w obr/min
Podstawiając zależność (4.46) do wzoru (4.45), wyrażenie na moment obrotowy można
napisać w postaci
sin
30
d
f
s
e
X
UE
n
m
T
(4.47)
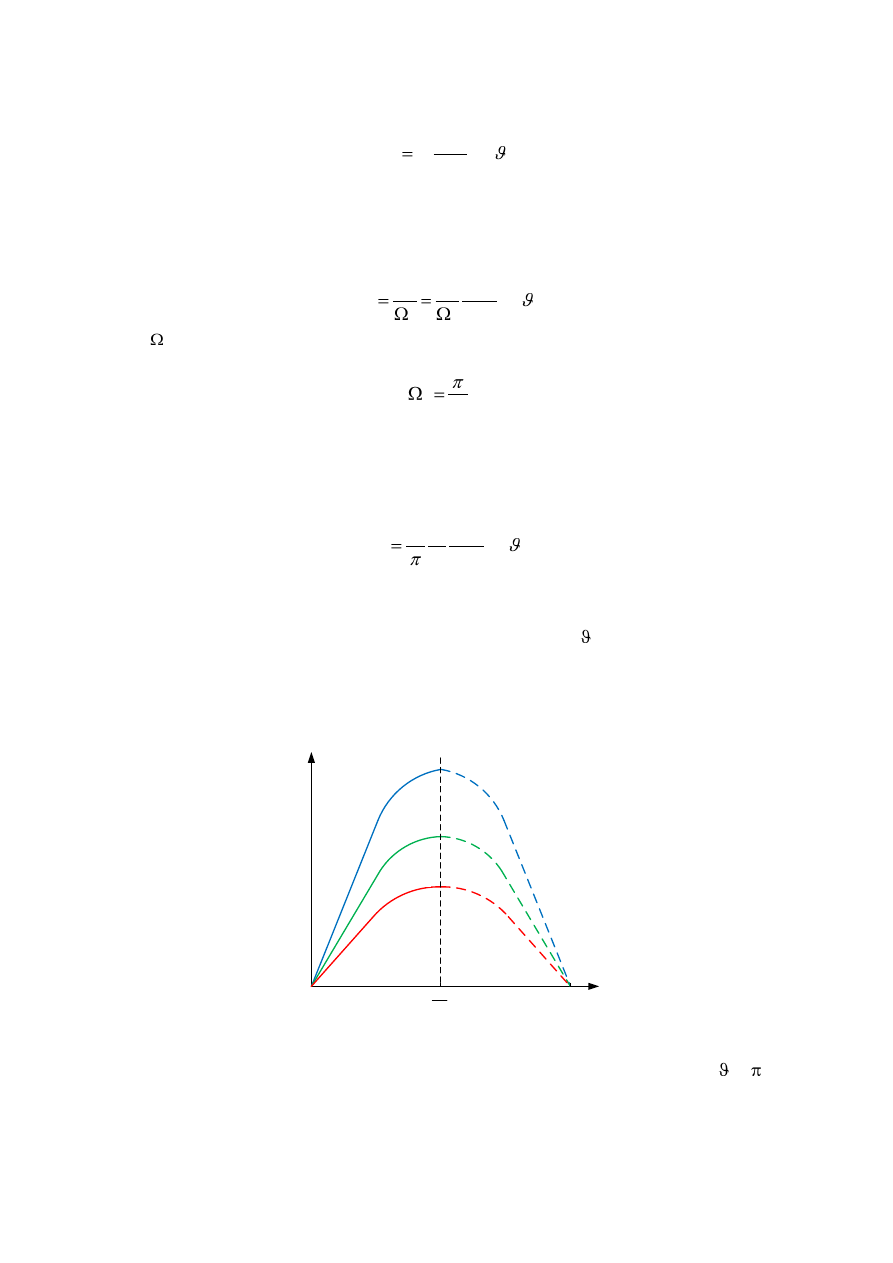
Na podstawie równania (4.44) lub (4.45) można wyznaczyć charakterystyki kątowe momentu
elektromagnetycznego (mocy czynnej) od kąta mocy tj. M=f( ) (rys. 4.20.) przy stałej
wartości prądu wzbudzenia I
f
=const. (co jest równoznaczne ze E
f
=const.) oraz stałej wartości
napięcia U=const.
M
p
J
p
2
I
f
I
I
f
II
>I
f
I
I
f
III
>I
f
II
Rys 4.20. Charakterystyki kątowe momentu elektromagnetycznego.
Moment elektromagnetyczny maszyny synchronicznej występuje przy kącie mocy = /2 i
wynosi
d
f
s
X
UE
n
m
T
30
max
(4.48)
Stosunek momentu elektromagnetycznego do momentu znamionowego nazywamy
przeciążalnością maszyny synchronicznej
N
N
N
T
T
sin
1
max
(4.49)
Przeciążalność maszyny synchronicznej jest odwrotnie proporcjonalna do sinusa kąta mocy.
Znamionowy kąt mocy zawiera się w przedziale =25 40
o
, a zatem przeciążalność maszyny
synchronicznej wynosi =1.6 2.4.
4.7. PRACA NA SIEĆ SZTYWNĄ
W celu zwiększenia pewności ruchu oraz zwiększenie elastyczności systemu
elektroenergetycznego, generatory synchroniczne pracują równolegle w danym systemie
energetycznym. Prądnica synchroniczna przyłączona do sieci sztywnej nie ma wpływu na
parametry te sieci (napięcie i częstotliwość sieci). Sieć sztywna jest siecią o impedancji
zastępczej równej zeru.
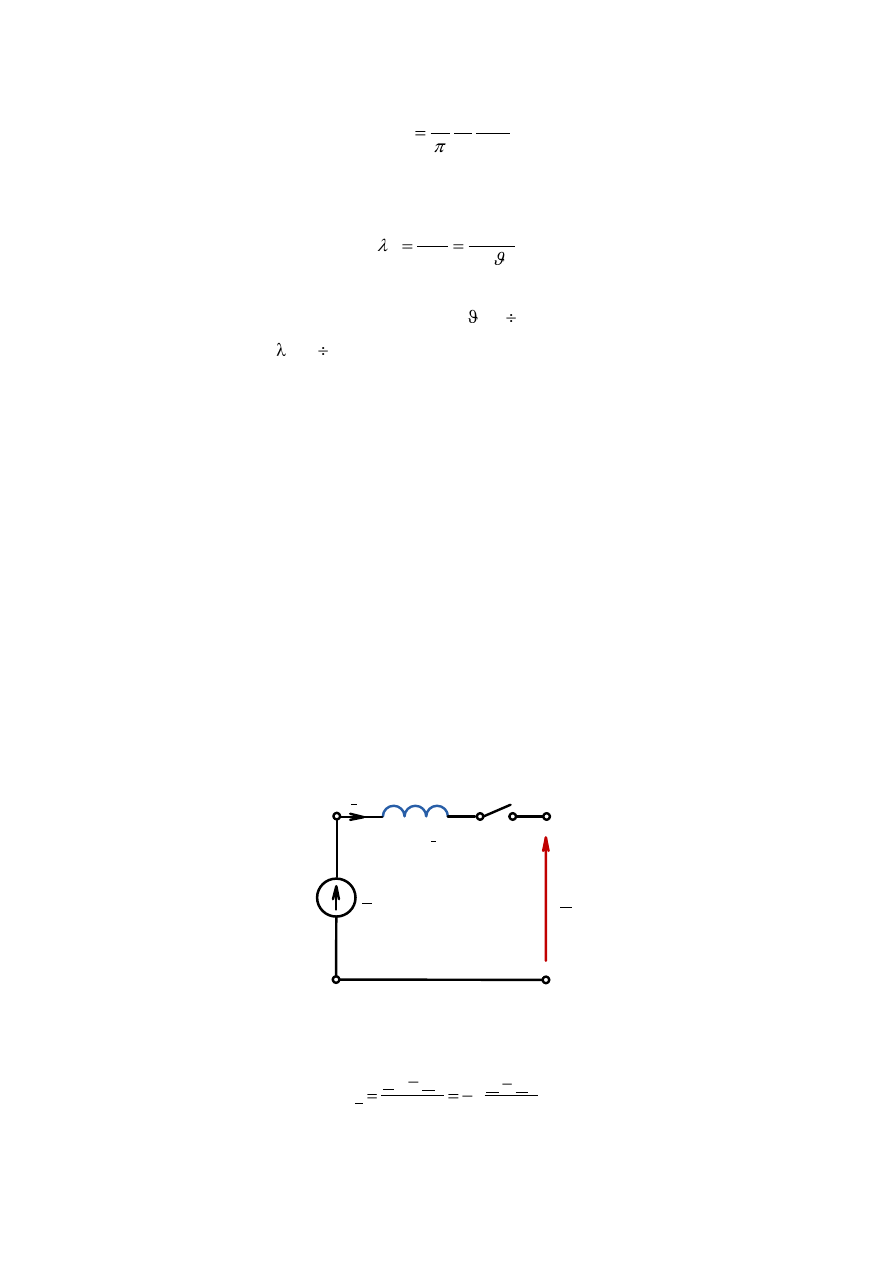
4.7.1. SYNCHRONIZACJA PRĄDNICY SYNCHRONICZNEJ Z SIECIĄ SZTYWNĄ
Aby włączyć prądnicę synchroniczną do sieci sztywnej, należy wykonać szereg czynności
zwanych synchronizacją. Generator synchroniczny powinien być włączony do sieci w taki
sposób, aby po zamknięciu wyłącznika pomiędzy siecią a prądnicą nie płynął prąd (rys.
4.21.).
X
d
E
f
U
I
I
E
d
=jX
d
I
Rys 4.21. Schemat generatora synchronicznego przyłączonego do sieci sztywnej.
Prąd płynący do sieci określony jest zależnością
d
s
d
s
f
jX
U
U
j
jX
U
E
I
(4.50)
Ze wzoru (4.50) wynika, że w chwili włączenia generatora do sieci potencjały po obu
stronach wyłącznika powinny być jednakowe, jak na wykresie wektorowym (rys.18b), czyli
s
U
U
(4.51)
tzn. wartości chwilowe u prądnicy i sieci u
s
we wszystkich fazach powinny być jednakowe,
czyli
)
2
sin(
2
)
2
sin(
2
s
s
s
t
f
U
t
f
U
(4.52)
A więc aby prądnica synchroniczna trójfazowa (rys. 19) mogła być włączona do sieci być
spełnione następujące warunki
1. wartości skuteczne prądnicy i sieci powinny być jednakowe,
2. wartości częstotliwości prądnicy i sieci powinny być jednakowe,
3. wartości chwilowe odpowiadających sobie napięć powinny być jednakowe (napięcia
powinny być z sobą w fazie),
4. kolejność (następstwo faz napięć prądnicy i sieci musi być taka sama.
S
R
T
V
f
U
s
f
s
I
f
U
p
V
f
f
p
U
o
V
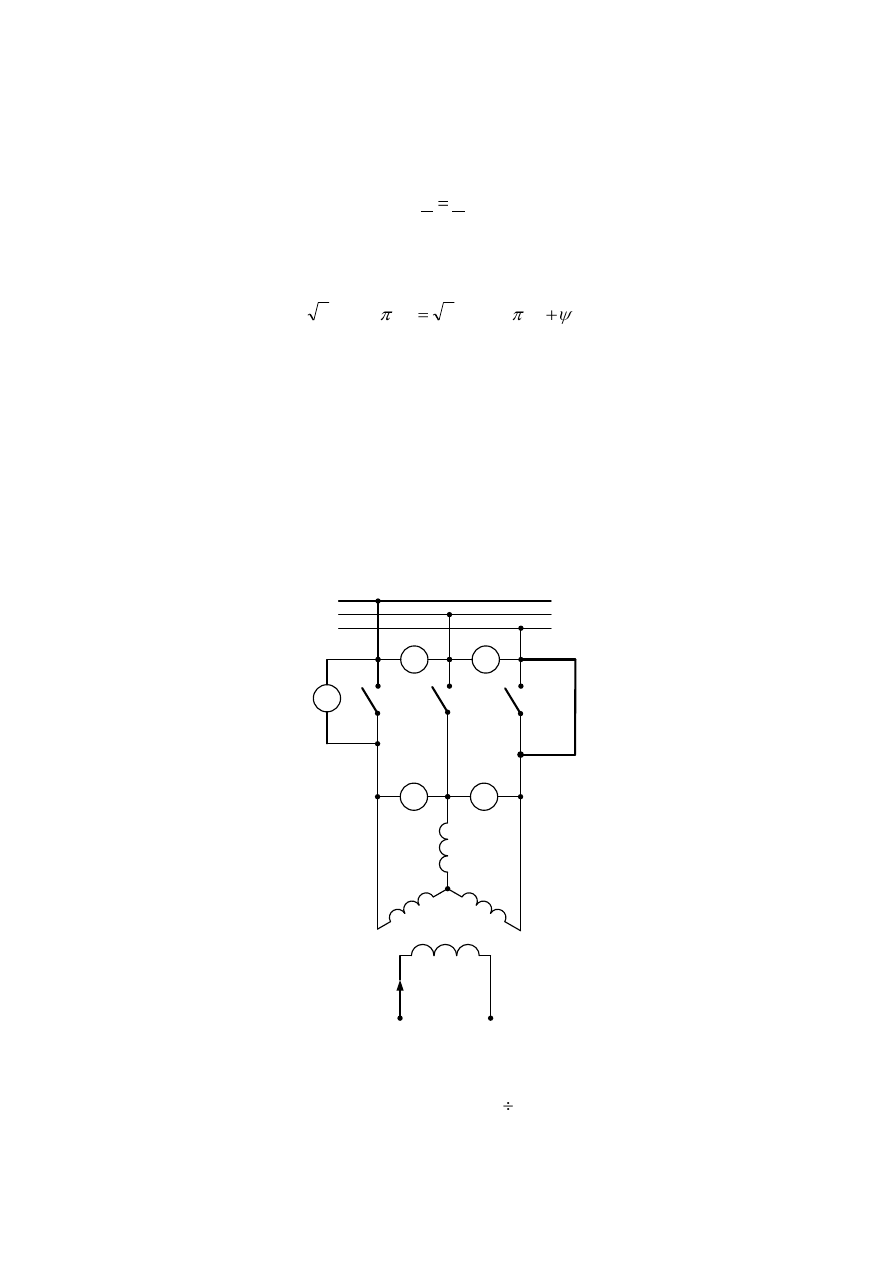
Rys 4.22. Schemat układu do synchronizacji prądnicy synchronicznej z siecią sztywną
Spełnienie warunków sformułowanych w punktach 1 3 dopuszcza się z pewną tolerancją
określoną dokładnością użytych przyrządów. Natomiast warunek 4 dotyczący kolejności faz
musi być spełniony kategorycznie. Kolejność faz można sprawdzić za pomocą silniczka
indukcyjnego, przyłączając go do odpowiadających sobie zacisków wyłącznika raz po stronie
sieci a następnie po stronie prądnicy; kolejność faz jest właściwa gdy w obu przypadkach
silnik wiruje w tą samą stronę. Włączaną do sieci sztywnej prądnicę synchroniczną należy
napędzić z prędkością zbliżoną do synchronicznej a następnie wzbudzić prądem I
f
, tak aby
wskazania woltomierzy po stronie prądnicy i sieci były takie same. Częstotliwości napięć
prądnicy i sieci powinny być zbliżone (regulację częstotliwości napięcia prądnicy
przeprowadza się poprzez regulację prędkości obrotowej silnika napędowego). Należy
sprawdzić czy następstwo faz prądnicy i sieci jest takie same. Przy jednakowych wartościach
skutecznych napięć ich wartości chwilowe mogą być różne. Sprawdzenie braku przesunięcia
fazowego między napięciami prądnicy i sieci dokonuje się za pomocą woltomierza zerowego
W przypadku gdy wartości skuteczne napięć prądnicy i sieci są jednakowe U=U
s
oraz
s
=0 i
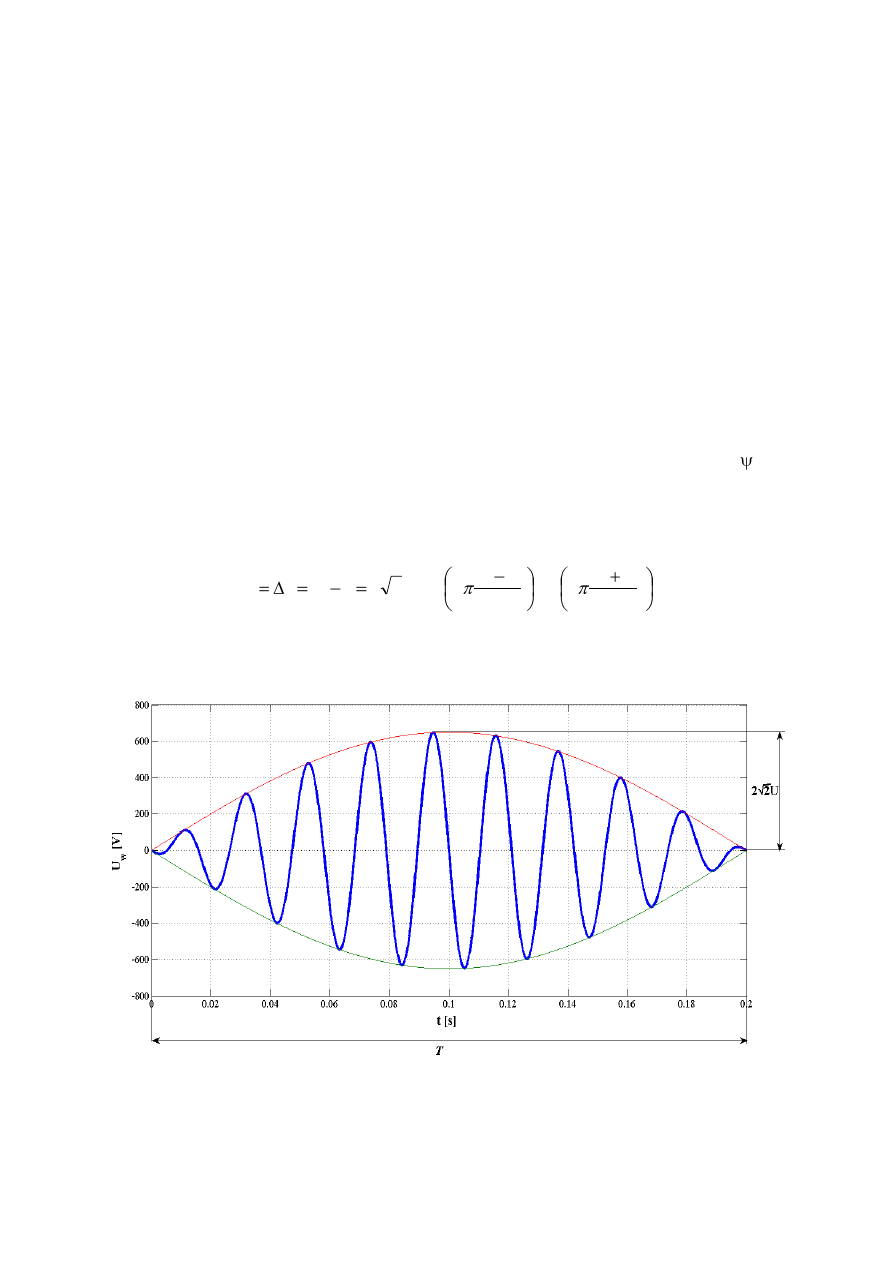
dla właściwej kolejności faz, lecz dla różnych częstotliwości, różnica wartości chwilowych
napięć wyniesie (napięcie na woltomierzu zerowym)
t
f
f
t
f
f
U
u
u
u
u
s
s
s
s
2
2
cos
2
2
sin
2
2
0
(4.53)
Ilustracją wyrażenia (4.53) jest przebieg czasowy napięcia na wyłączniku (woltomierzu
zerowym) przedstawiony na rys. 4.23.
Rys 4.23. Przebieg czasowy napięcia u
0
na biegunach wyłącznika pomiędzy siecią a prądnicą.
Amplituda napięcia na woltomierzu zerowym U
0
ma podwójną wartość amplitudy sieci
zasilającej. Częstotliwość obwiedni tego napięcia jest równa różnicy częstotliwości napięcia
sieci i częstotliwości napięcia prądnicy (f
s
– f ). Zgodność faz napięć prądnicy i sieci
występuję wówczas, gdy wskazówka woltomierza V
0
wskazuje zero. W chwili gdy
woltomierz zerowy pokazuje wartość równą zeru, można zamknąć wyłącznik W i włączyć
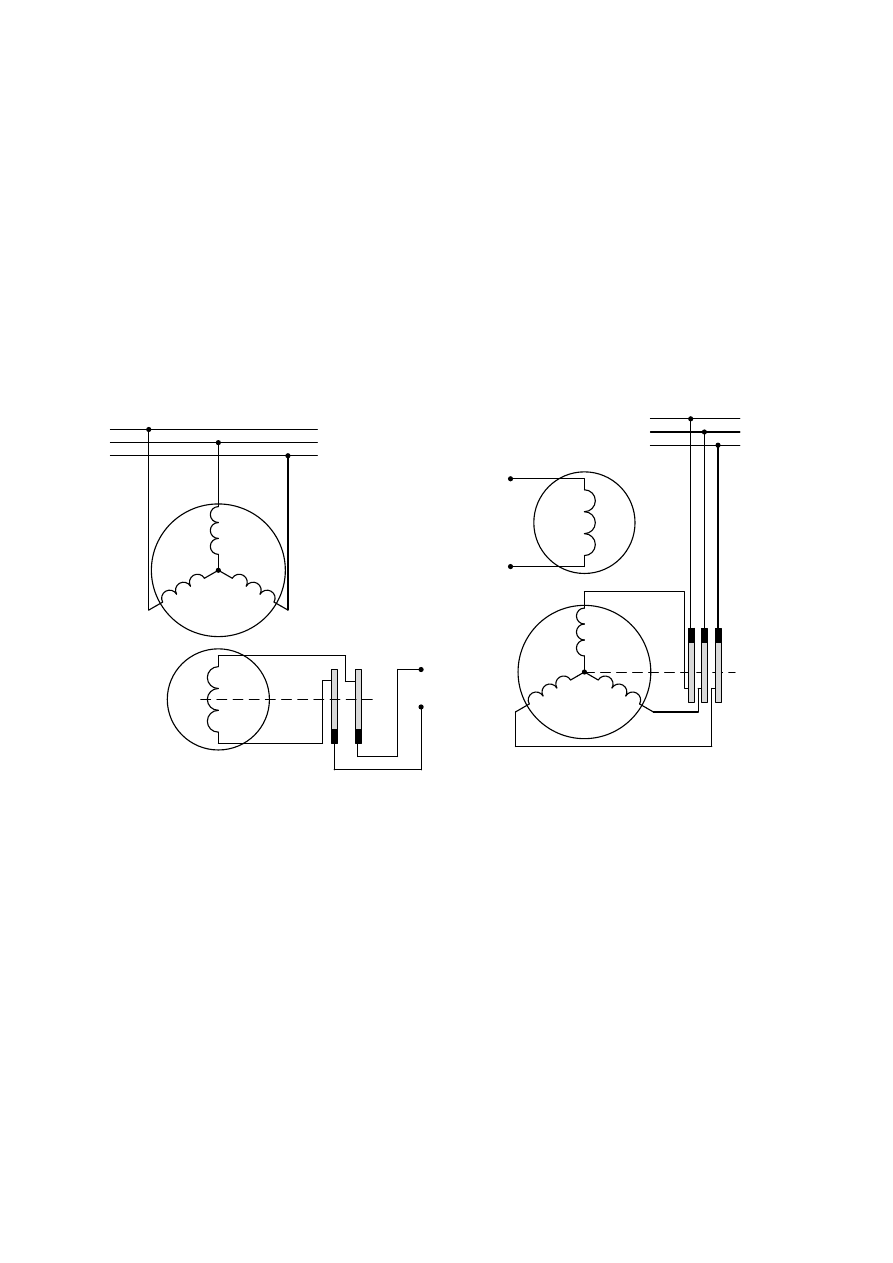
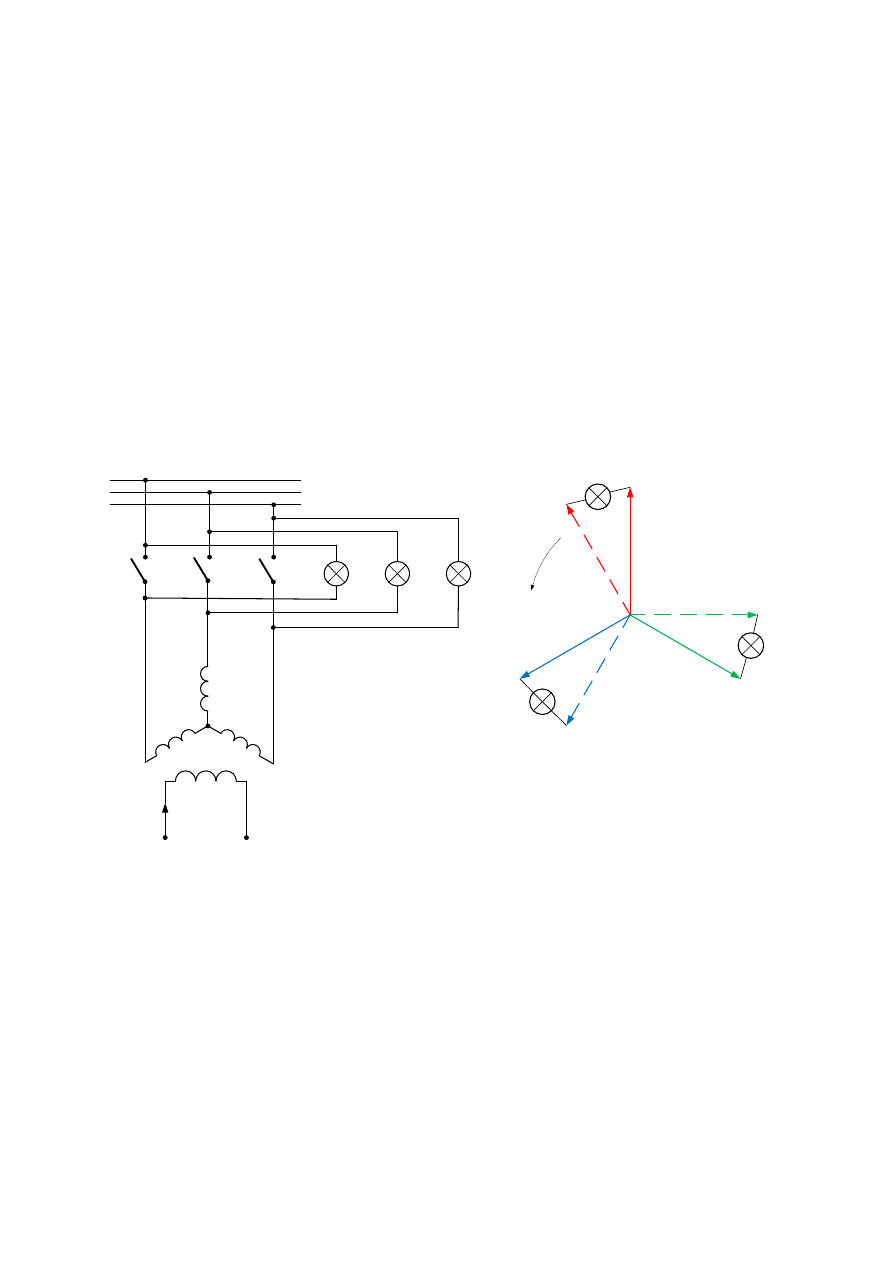
prądnicę do sieci sztywnej. Do przeprowadzenia synchronizacji stosowany jest również układ
żarówek włączanych między zaciski sieci i prądnicy. Żarówki włączane jak na rys 4.24 (układ
synchronizacji na ciemno) spełniają rolę woltomierza zerowego.
a)
S
R
T
I
f
1
2
3
U
V
W
b)
R
S
T
ω
s
-ω
p
1
3
2
U
U
V
Rys 4.24. Układ połączeń żarówek do synchronizacji na ciemno a) schemat połączenia żarówek,
b) wykresy wektorowe napięć przy zgodnym następstwie faz,
c) wykresy wektorowe napięć przy niezgodnym następstwie faz.
Przy zgodnej kolejności faz wszystkie żarówki zapalają sie i gasną jednocześnie. Wyłącznik
W należy zamknąć w chwili gdy wszystkie żarówki gasną (woltomierz zerowy wskazuje
zero).
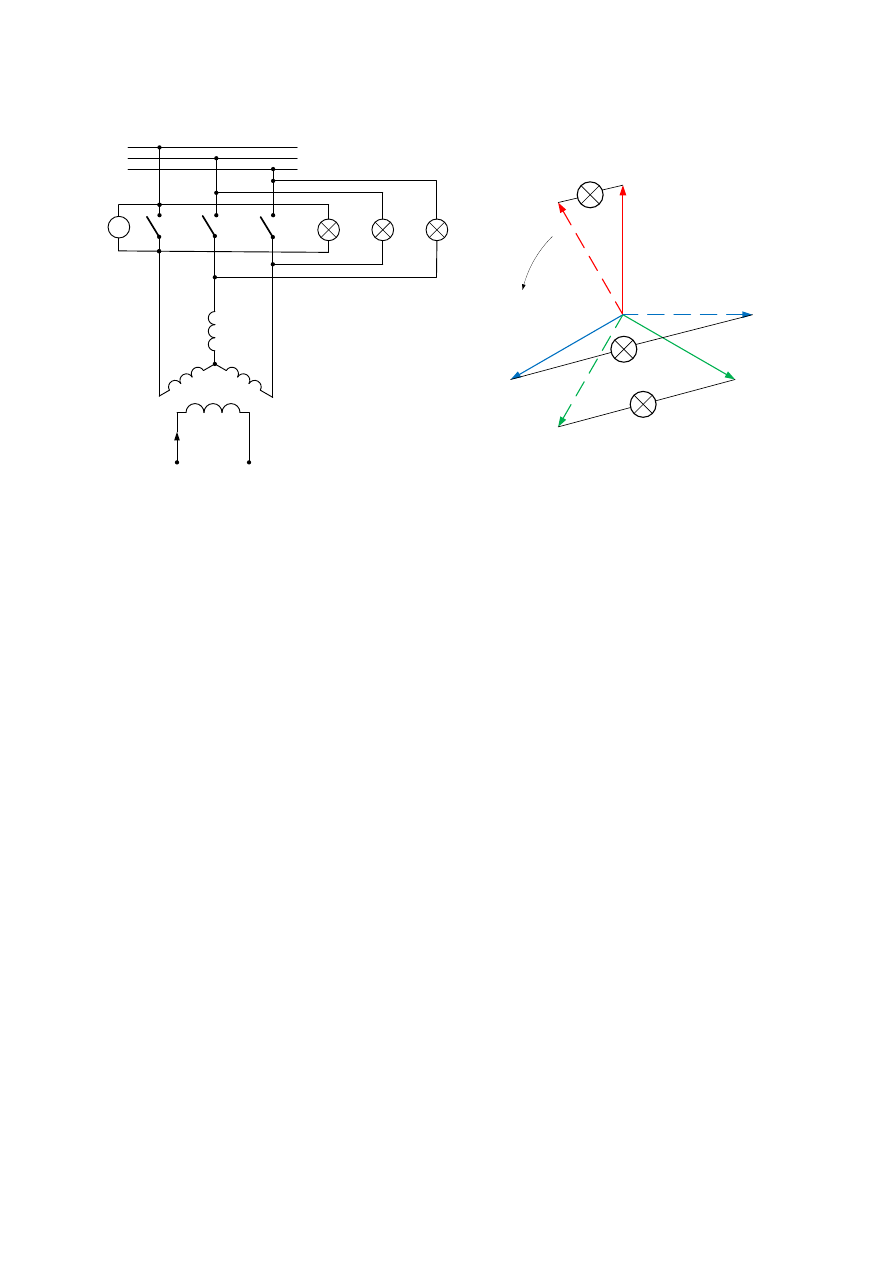
W praktyce stosowanym układem synchronizacji jest układ połączeń żarówek włączanych
między zaciski sieci i prądnicy na światło wirujące - rys 4.25.
a)
S
R
T
I
f
1
2
3
U
V
W
U
o
V
b)
R
S
T
ω
s
-ω
p
1
U
V
W
2
3
Rys. 4.25. Układ połączeń żarówek do synchronizacji na światło wirujące:
a) schemat połączenia żarówek,
b) wykresy wektorowe napięć przy zgodnym następstwie faz,
c) wykresy wektorowe napięć przy niezgodnym następstwie faz.
W układzie tym jedna żarówka jest załączona na "ciemno" (tzn. do odpowiadających sobie
faz), a pozostałe dwie żarówki włączane są na "jasno". W układzie tym przy zgodnej
kolejności faz napięć generatora i sieci żarówki zapalają sie i gasną kolejno tworząc światło
wirujące. Wyłącznik W należy zamknąć wtedy, gdy żarówka włączona na ciemno gaśnie
(woltomierz zerowy wskazuje zero).
4.7.2. REGULACJA MOCY MASZYNY SYNCHRONICZNEJ WSPÓŁPRACUJĄCEJ
Z SIECIĄ SZTYWNĄ
Po przeprowadzeniu idealnej synchronizacji i załączeniu do sieci maszyna synchroniczna nie
pobiera ani nie oddaje mocy do sieci (przypadek teoretyczny). Aby maszyna stała sie prądnicą
należy do wału maszyny doprowadzić moc mechaniczną. Maszyna synchroniczna po
przeprowadzeniu idealnej synchronizacji może pracować jako:
• prądnica - jeśli napędzi się ją pewną mocą mechaniczną,
• silnik - jeśli obciąży się ją mocą mechaniczną na wale.
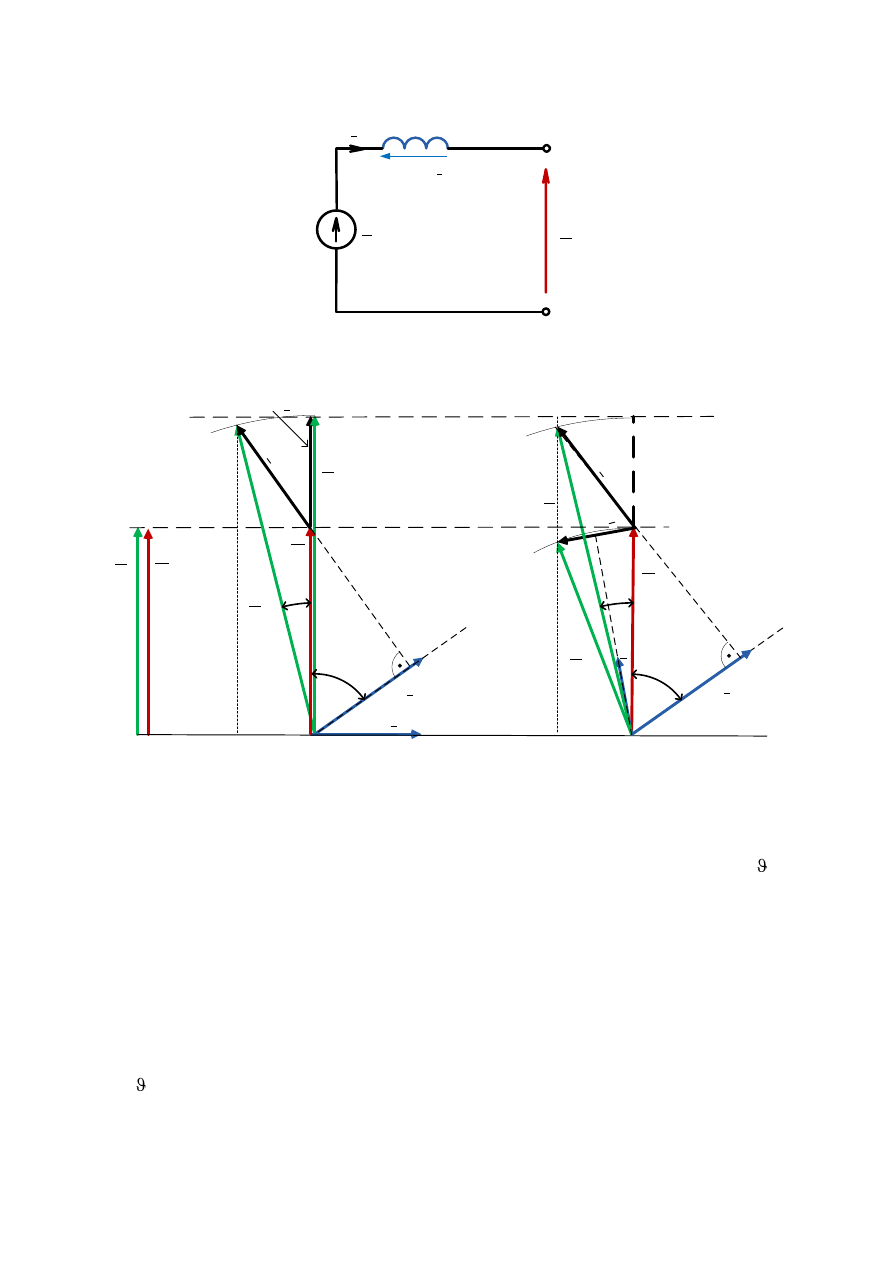
Na rys. 4.26 przedstawiono uproszczony schemat zastępczy maszyny synchronicznej przy
strzałkowaniu prądnicowym, natomiast na rys. 4.24 przedstawiono wykresy wektorowe przy
pracy prądnicowej zachowując strzałkowanie prądnicowe (rys. 4.26).
X
d
E
f
U
I
I
E
d
=jX
d
I
Rys 4.26. Uproszczony schemat zastępczy maszyny synchronicznej przy strzałkowaniu
prądnicowym.
E
f
j
J
U
I
II
jX
d
I
I
E
f
I
P=const
.
E
f
II
jX
d
I
II
j
U
P=const.
U
I
I
jX
d
I
I
jX
d
I
II
I
I
I
II
J
E
f
II
E
f
I
a)
b)
c)
Rys 4. 27. Wykresy wektorowe dla pracy prądnicowej przy pracy na sieć sztywną: a) w stanie idealnej
synchronizacji I=0, b) ilustracja stanu pracy gdy najpierw zwiększamy prąd wzbudzenia, a następnie
moc czynną, c) ilustracja stanu pracy gdy najpierw zwiększamy moc czynną, a następnie prąd
wzbudzenia
Gdy po idealnej synchronizacji maszyna zostaje włączona do sieci, wówczas E
f
=U, =0
(rys. 4. 27a), a więc P=0 i I =0. Jeśli teraz zwiększy sie prąd wzbudzenia I
f
to napięcie E
f
rośnie do E'
f
, pozostając w fazie z U, moc P nadal jest równa zero. Pojawia sie spadek
napięcia Na reaktancji X
d
i w maszynie popłynie prąd indukcyjny I' (rys. 4.27b). W tym stanie
pracy maszyna oddaje do sieci moc bierną indukcyjną przy mocy czynnej równej zero. Aby
prądnica oddawała moc czynną do sieci do wału prądnicy należy doprowadzić moc
mechaniczną, wówczas wirnik chwilowo przyspieszy i napięcie E
f
wyprzedzi napięcie U o
kąt osiągając wartość E"
f
(długość wektora napięcia E
f
pozostanie taka sama). Ten sam
stan pracy można osiągnąć jeżeli najpierw doprowadzimy moc czynną do wału maszyny, a
następnie zwiększymy prąd wzbudzenia (rys. 4.27c).
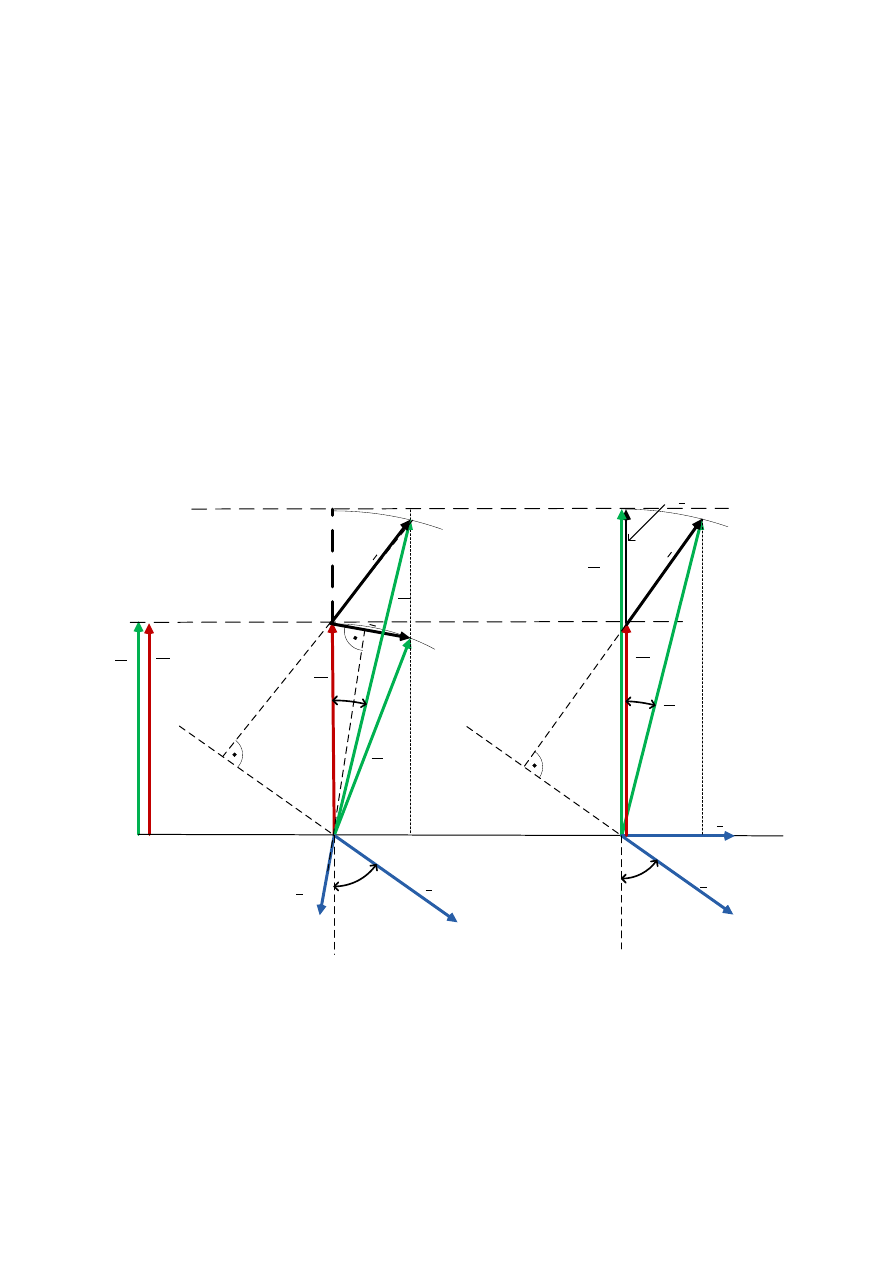
Jeżeli po idealnej synchronizacji (rys 4. 25a) odłączy się od maszyny synchronicznej
doprowadzoną moc mechaniczną, a następnie obciąży się na wale mocą mechaniczną, to
wirnik zostanie chwilowo przyhamowany. Wówczas napięcie E
f
opóźni się względem
napięcia U (rys. 4.25b). W tym stanie pracy maszyna synchroniczna pobiera z sieci moc
czynną (oddaje na wale moc mechaniczną) i oddaje moc bierną pojemnościową (pobiera moc
bierną indukcyjną). Aby maszyna oddawała moc bierną indukcyjną należy zwiększyć prąd
wzbudzenia (wektor napięcia osiągnie wówczas położenie E"
f
). W tym stanie pracy maszyna
synchroniczna pracuje jako silnik. Ten sam stan pracy można osiągnąć zwiększając najpierw
prąd wzbudzenia, a następnie maszynę synchroniczną obciążyć na wale mocą mechaniczną
(rys. 4.28c).
E
f
U
a)
j
U
P
=
const.
jX
d
I
I
jX
d
I
II
I
I
I
II
J
E
f
II
E
f
I
b)
j
J
U
I
II
jX
d
I
I
E
f
I
P
=
const
.
E
f
II
jX
d
I
II
I
I
c)
Rys 4. 28. Wykresy wektorowe dla pracy silnikowej a) w stanie idealnej synchronizacji I=0, b)
ilustracja stanu pracy gdy najpierw zwiększamy prąd wzbudzenia, a następnie moc czynną, c)
ilustracja stanu pracy gdy najpierw zwiększamy moc czynną, a następnie prąd wzbudzenia
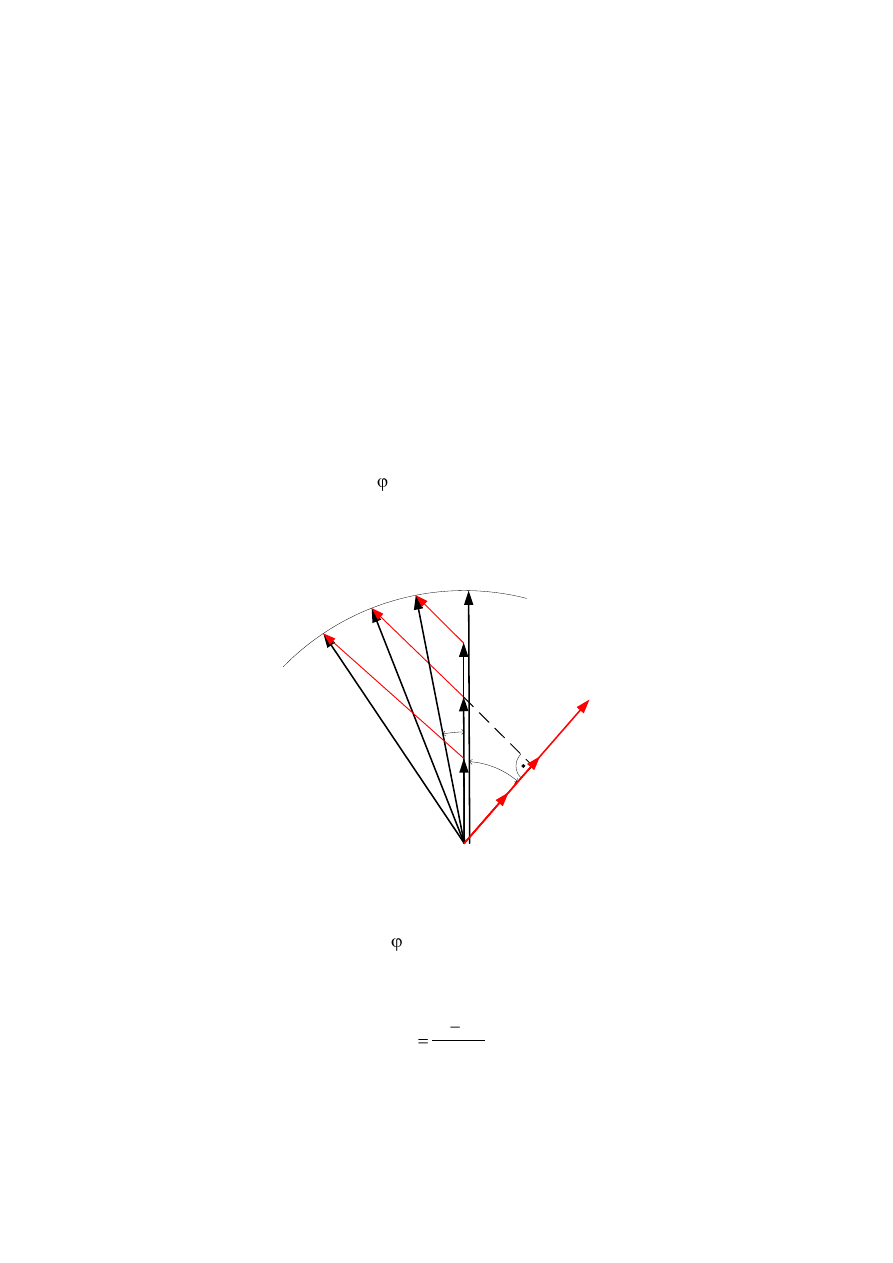
Szczególne znaczenie dla maszyny synchronicznej pracującej na sieć sztywną ma praca przy
E
f
=const. i P=var oraz praca przy P=const i E
f
=var . Praca maszyny synchronicznej przy
E
f
=const. i P=var ilustruje wykres wektorowy przedstawiony na rys. 4.29.
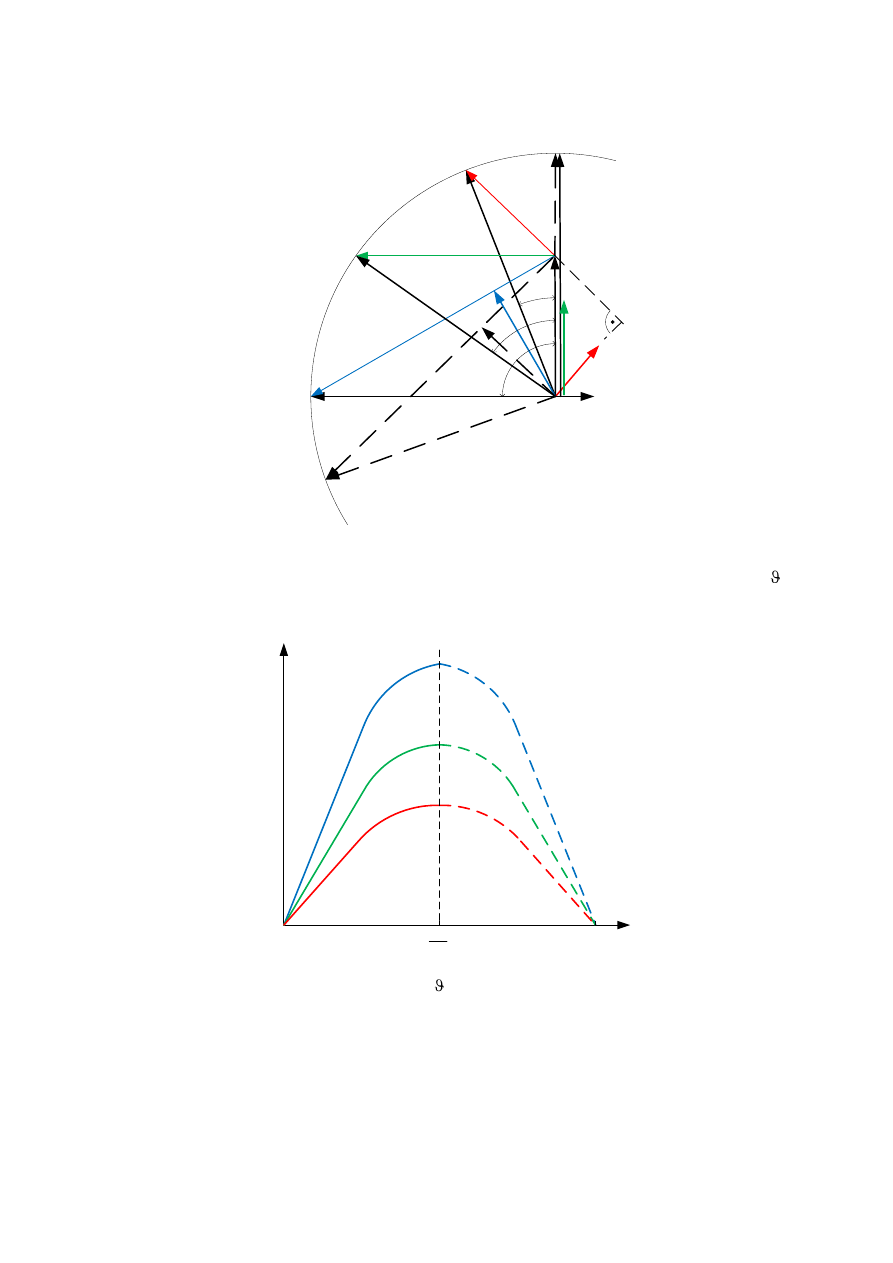
E
f
I
E
f
II
E
f
III
E
f
IV
I
I
jX
d
I
I
jX
d
I
II
jX
d
I
III
jX
d
I
IV
I
I
II
I
III
E
f
J
I
J
II
J
III
U
Rys 4.29. Wykres wektorowy przy E
f
=const i P=var.
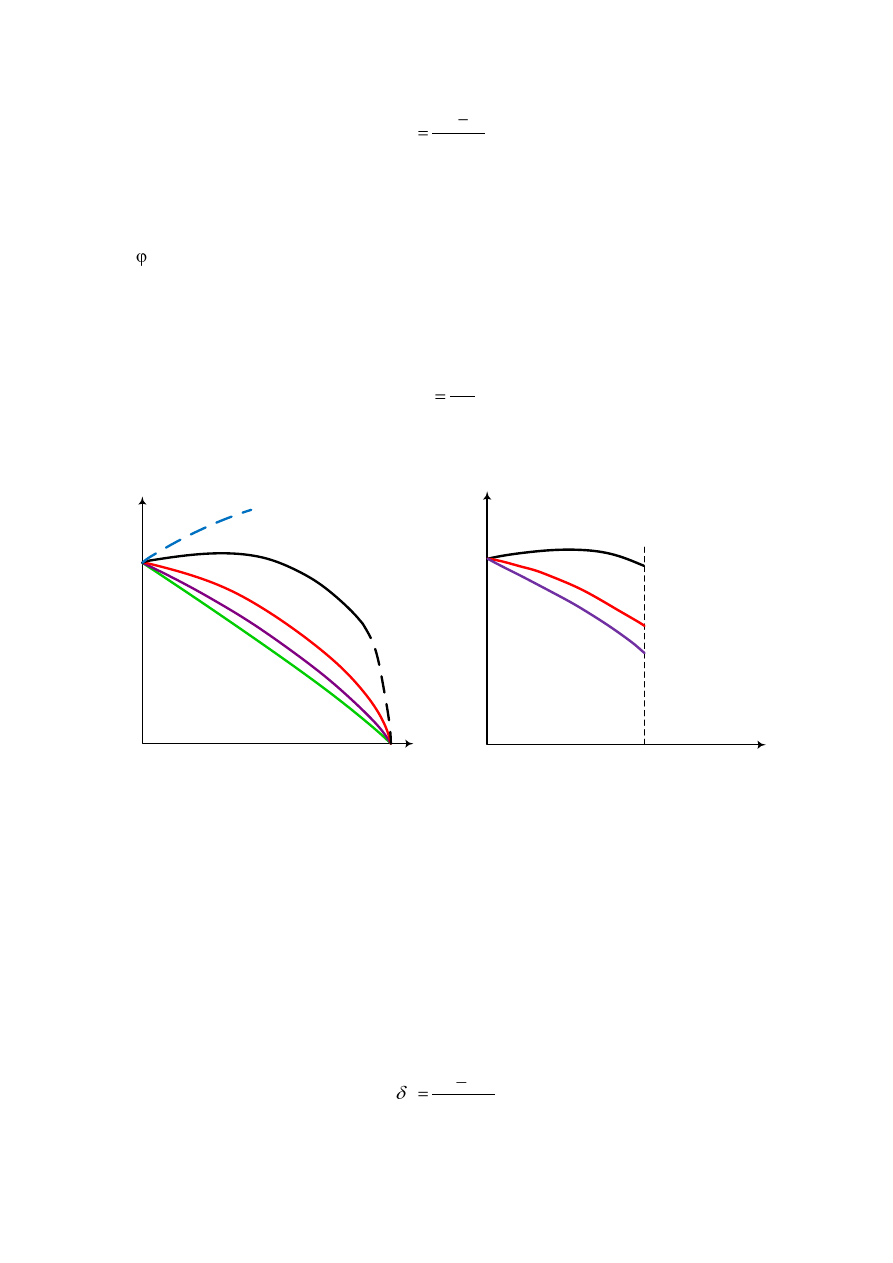
Na podstawie wykresu wektorowego sporządza się charakterystyki kątowe M=f( )
przedstawione na rys 4.30.
P
p
J
p
2
I
f
I
I
f
II
>I
f
I
I
f
III
>I
f
II
Rys 4.30. Charakterystyki kątowe P=f( ) dla różnych wartości prądu wzbudzenia
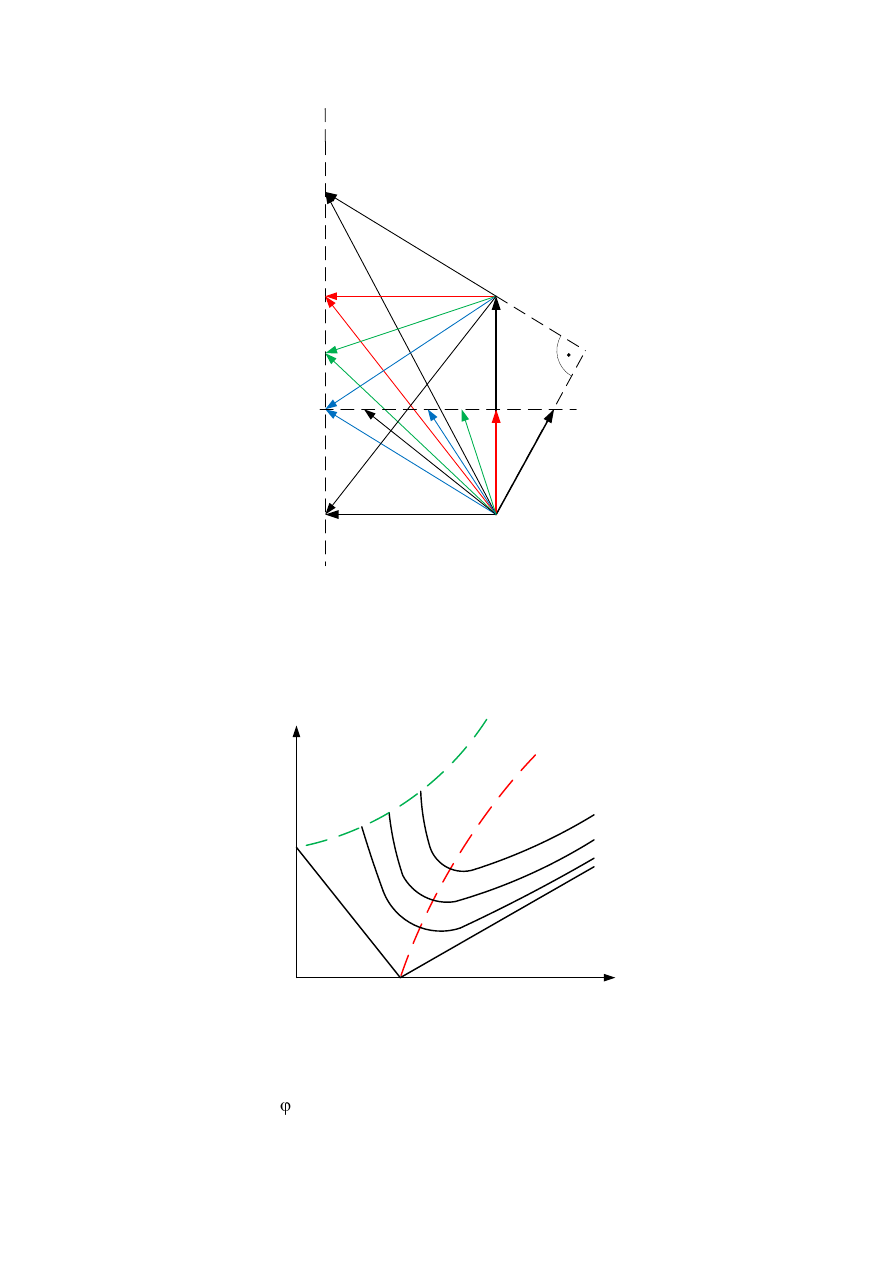
Prace maszyny synchronicznej przy P=const. i E
f
=var ilustruje wykres wektorowy
przedstawiony na rys 4.31.
E
f
I
E
f
II
E
f
V
I
I
jX
d
I
II
jX
d
I
III
jX
d
I
IV
I
III
I
IV
P
=cons
t.
E
f
III
E
f
IV
I
V
I
II
jX
d
I
I
jX
d
I
V
Rys 4.31. Wykres wektorowy przy P=const. i E
f
=var.
Na podstawie wykresu wektorowego sporządza się charakterystyki I = f(I
f
) przy P=const -
krzywe "V" (krzywe Mordey'a) przedstawione Na rys. 4.32
.
I
P=0
I
f
RL
RC
P
I
P
II
>P
I
P
III
>P
II
Gran
ica stabilności
Rys 4.32. Zależność prądu obciążenia od prądu wzbudzenia przy P = const (krzywe "V")
Minimalne wartości prądu obciążenia każdej krzywej "V" określają pracę maszyny
synchronicznej przy cos = 1.
4.8 SILNIK SYNCHRONICZNY
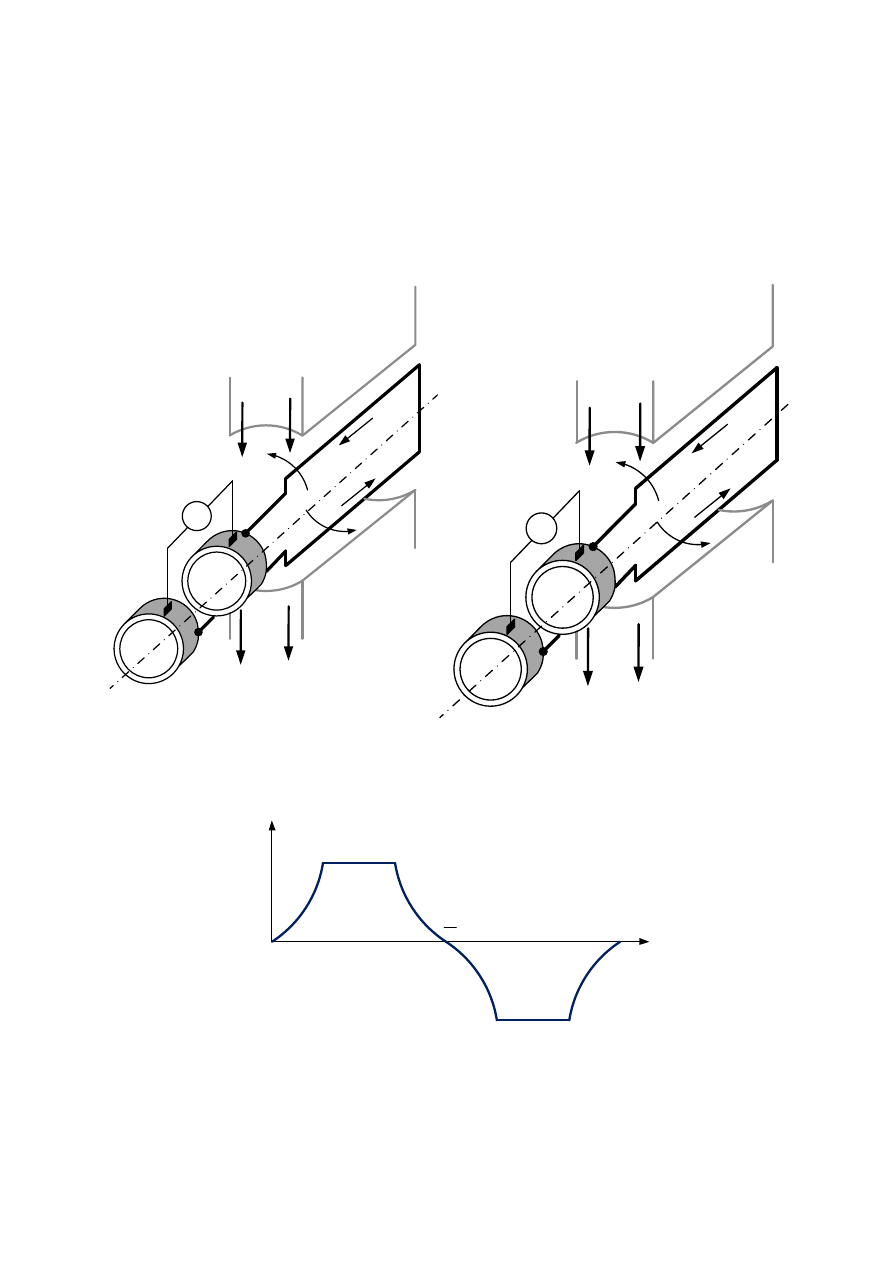
Po włączeniu uzwojenia twornika silnika synchronicznego do sieci prąd płynący w
uzwojeniu wytwarza pole wirujące, natomiast obwód wzbudzenia zasilony prądem stałym
wytwarza pole stałe względem stojana. Gdy wirnik silnika jest nieruchomy lub wiruje z
prędkością n
r
różną od synchronicznej n
s
, to pole wirujące wiruje względem wirnika z
prędkością
s
n
=
n
-
n
=
n
s
s
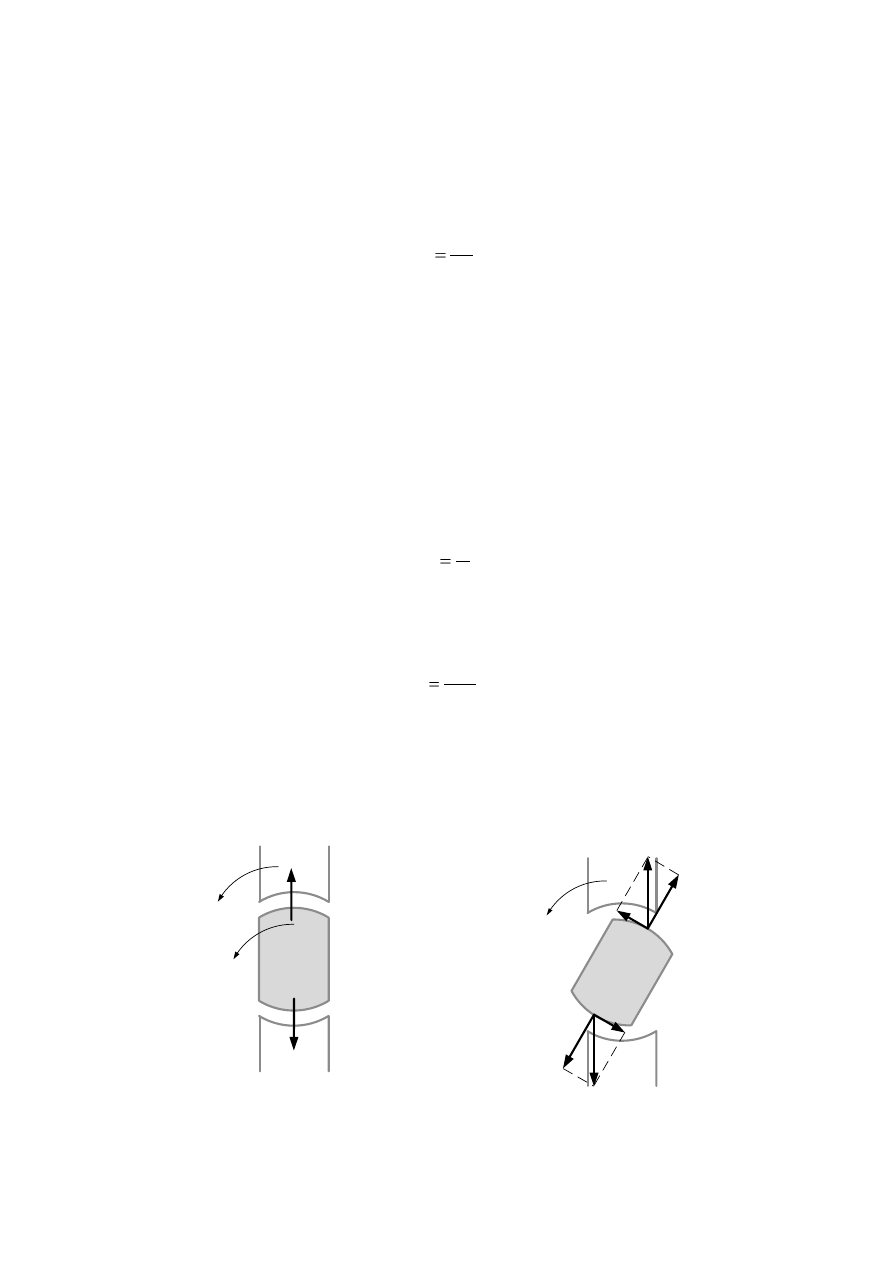
r
, gdzie s jest poślizgiem. W tych warunkach powstaje przemienny
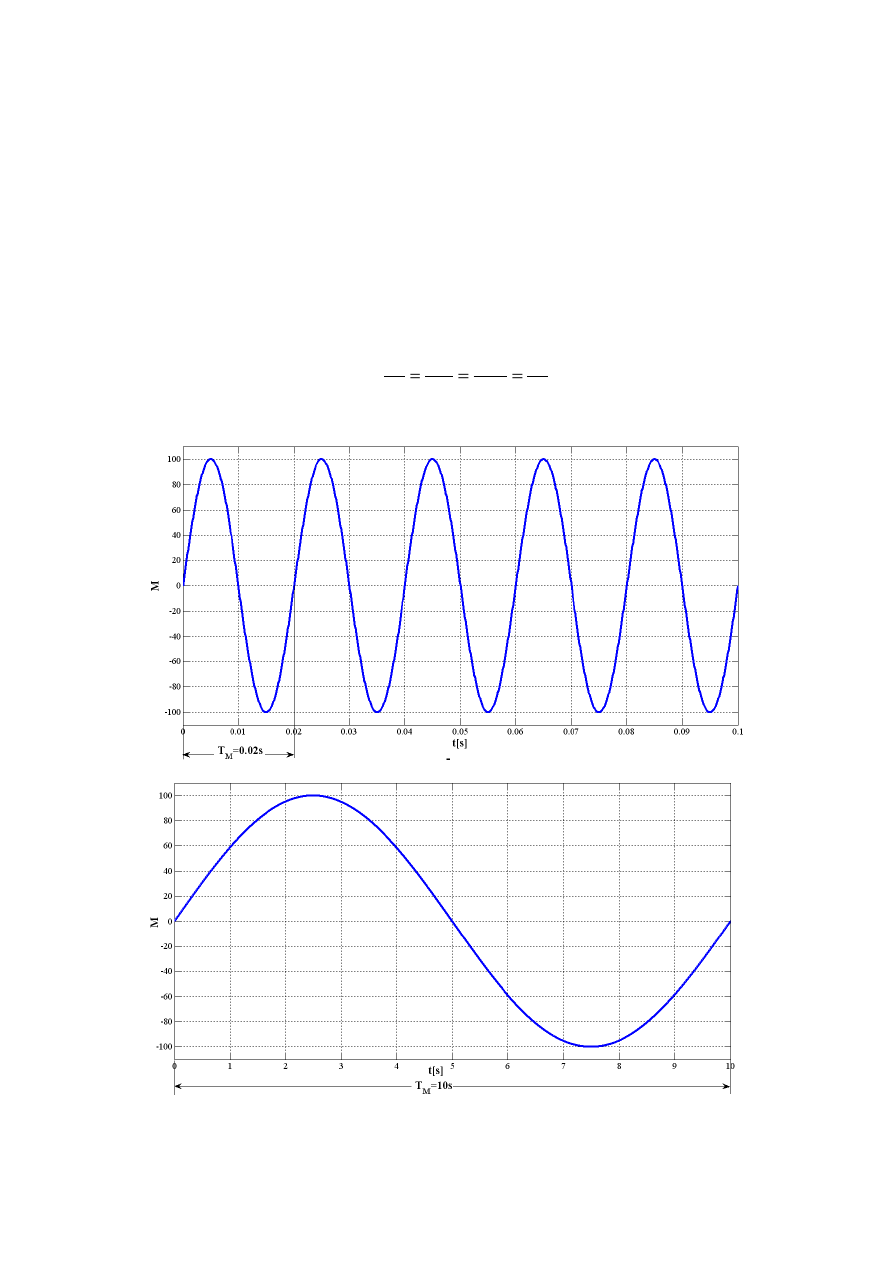
moment obrotowy (rys 4.33) o okresie
równym
s
f
1
s
pn
1
pn
1
f
1
=
T
s
s
r
M
M
(4.54)
a)
b)
Rys 4.33. Wykres zmian momentu rozruchowego a) w przypadku nieruchomego wirnika, b) wirnik
wiruje z prędkością n
r
różną od synchronicznej n
s
Wartość średnia momentu rozruchowego wynosi zero, przy nieruchomym wirniku (s=1)
okres momentu rozruchowego wynosi 0.02s. Silnik w tym stanie nie wytwarza momentu
rozruchowego. Jeżeli wirnik silnika zostanie napędzony z prędkością bliską prędkości
synchronicznej, przy której poślizg wynosi s=0.002, wówczas okres zmian momentu
rozruchowego będzie wynosił T
M
=10s. Powolny okres zmian wirującego strumienia stojana
względem wirującego z wirnikiem stałego pola wirnika spowoduje, że moment rozruchowy w
długim przedziale czasu działa w kierunku dodatnim na wirnik silnika. Spowoduje to
wciągnięcie wirnika w synchronizm. wirnik silnika będzie wirował z prędkością
synchroniczną względem stojana, wytwarzając moment elektromagnetyczny
2
sin
1
1
2
1
sin
30
2
d
q
d
f
s
e
X
X
U
X
UE
n
m
T
(4.55)
gdzie: X
d
- reaktancja synchroniczna w osi d, X
q
- reaktancja synchroniczna w osi q.
Warunkiem rozruchu silnika jest doprowadzenie wirnika do prędkości synchronicznej. Można
tego dokonać trzema sposobami:
rozruch za pomocą obcej maszyny,
rozruch asynchroniczny,
rozruch częstotliwościowy.
Rozruch częstotliwościowy polega na zasilania uzwojeń twornika za pomocą źródła o
regulowanej częstotliwości np. falownika. Częstotliwość zmienia się od 0Hz do
częstotliwości sieci (znamionowej) zmieniając jednocześnie napięcie (z reguły U/f=const).
przy powolnej zmianie częstotliwości prędkość obrotowa wirnika podąża za prędkością zmian
pola wirującego stojana.
Rozruch asynchroniczny jest najczęściej stosowany. Aby uzyskać moment rozruchowy w
nabiegunnikach magneśnicy umieszcza się klatkę rozruchową. przy prędkości zbliżonej do
synchronicznej włącza się obwód wzbudzenia. Wirnik wpada w synchronizm.
Jeżeli podczas rozruchu uzwojenie wzbudzenia jest zwarte, wówczas prąd przemienny
płynący w obwodzie wzbudzenia o częstotliwości f
r
= f
s
s wytwarza pole magnetyczne
pulsujące, które możNa rozłożyć na dwa pola wirujące w przeciwnych kierunkach. Pole
wirujące współbieżne (wiruje zgodnie z ruchem wirnika) wiruje względem stojana z
prędkością
s
n
s
s
p
60f
p
60f
=
n
s
r
1r
(4.56)
natomiast pole wirujące przeciwbieżne (wiruje przeciwnie do ruchu wirnika) wiruje
względem stojana z prędkością
s
n
s
s
p
60f
p
60f
-
=
n
s
r
2r
(4.57)
Pole wirujące współbieżne oraz przeciwbieżne wirują względem stojana z prędkością
s
s
s
n
s
n
s
n
)
1
(
n
n
=
n
1r
1s
(4.58)
)
2
1
(
)
1
(
n
n
=
n
2r
2s
s
n
s
n
s
n
s
s
s
(4.59)
Z zależności (4.58) wynika, że pole współbieżne wiruje względem stojana z prędkością
synchroniczną i wspólnie z klatka rozruchowa wytwarza moment rozruchowy dodatni w
całym zakresie pracy silnikowej. Natomiast pole przeciwbieżne wiruje względem stojana z
prędkością zależną od poślizgu. Dla przedziałów prędkości określonych zależnością (4.60)
poślizg wynosi
5
.
0
0
czyli
n
n
5
.
0
0.5
s
czyli
2
n
n
1
5
.
0
czyli
2
n
n
0
s
s
s
s
s
(4.60)
W przedziale poślizgów
1
5
.
0
s
pole przeciwbieżne wiruje względem stojana, zgodnie z
zależnością (4.59), z ujemną prędkością, a więc działa na stojan w kierunku ujemnym, a na
wirnik w kierunku dodatnim dając dodatni moment obrotowy. Dla poślizgu
5
.
0
s
pole
przeciwbieżne jest nieruchome względem stojana, zgodnie z zależnością (4.59), a więc nie
wytwarza momentu obrotowego. W przedziale poślizgów
5
.
0
0
s
pole przeciwbieżne
wiruje względem stojana, zgodnie z zależnością (4.59), z dodatnią prędkością, a więc działa
na stojan w kierunku dodatnim, a na wirnik w kierunku ujemnym dając ujemny moment
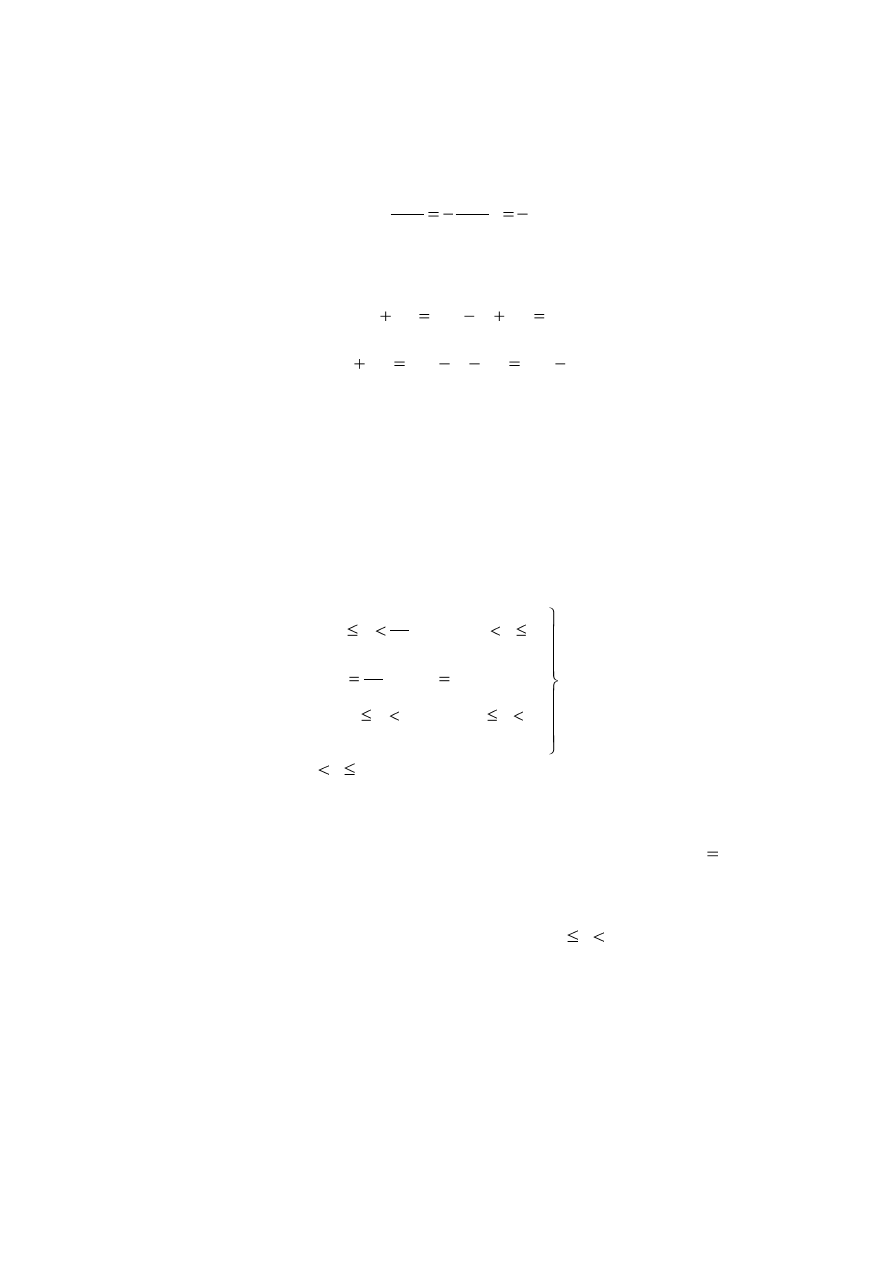
obrotowy. Na rys 4.34 przedstawiono charakterystyki mechaniczne przy rozruchu
asynchronicznym silnika synchronicznego.
a)
M
n
n
s
M
wyp
n
1
2
M
k+
M
wsp
M
przeciw
M
m
n
k
b)
M
n
n
s
M
wyp
n
1
2
M
k+
M
wsp
M
przeciw
M
m
n
k
Rys 4.34. Charakterystyki mechaniczne przy rozruchu asynchronicznym silnika synchronicznego a)
obwód wzbudzenia zwarty, a) obwód wzbudzenia zamknięty przez rezystancję R
d
Z rys. 4.34a wynika, że krzywa momentu wypadkowego posiada charakterystyczne siodło
przy połowie prędkości synchronicznej (s=0.5), które uniemożliwia dokonanie rozruchu
silnika synchronicznego. W tym celu zmniejszenia momentu od składowej przeciwbieżnej
należy ograniczyć prąd wzbudzenia poprzez włączenie w obwód wzbudzenia na czas
rozruchu dodatkowej rezystancji R
d
=(5÷10)R
f
, gdzie R
f
jest rezystancją obwodu wzbudzenia.
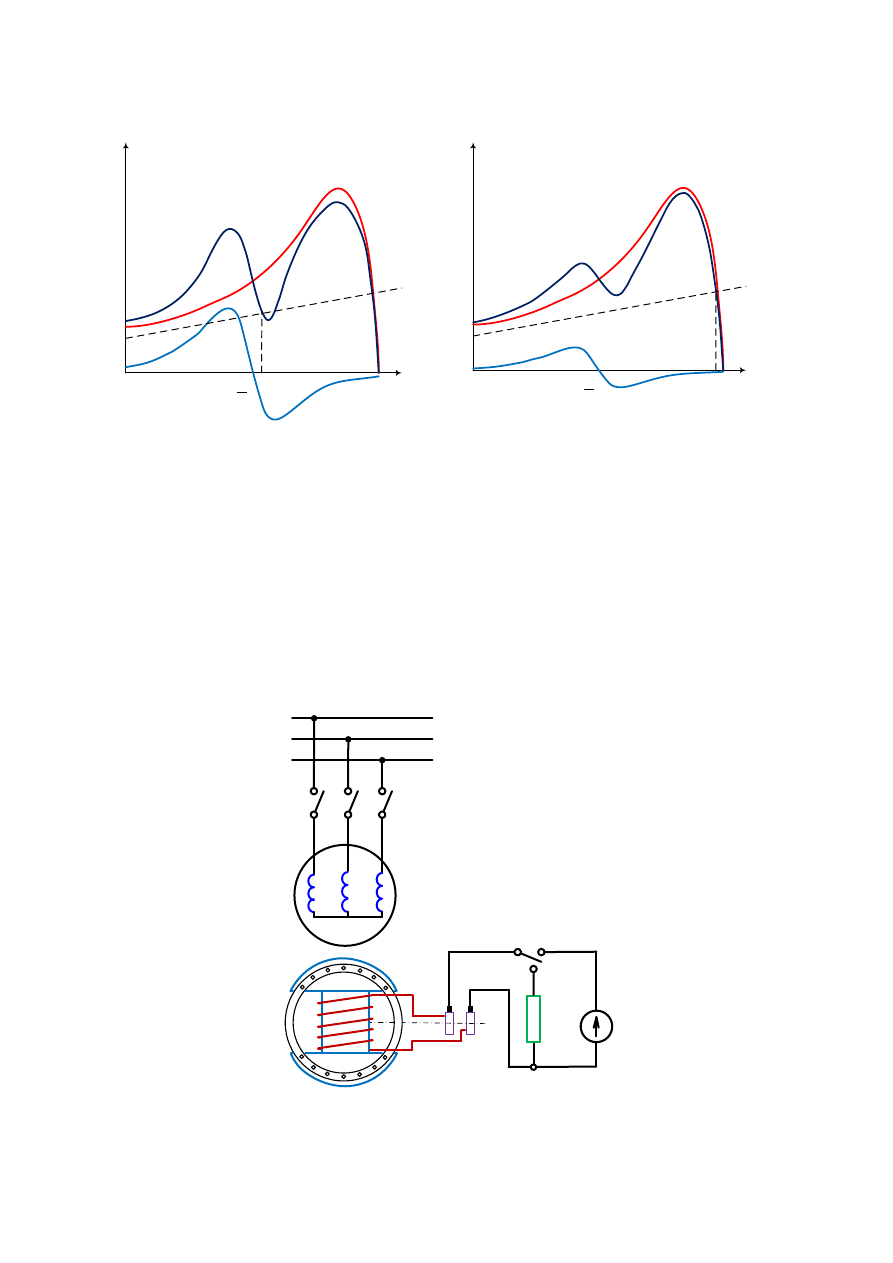
Na rys 4.35 przedstawiono schemat układu połączeń przy rozruchu asynchronicznym.
L1
L2
L3
R
fd
U
f
1
2
W
Rys 4.35. Schemat układu połączeń przy rozruchu asynchronicznym
5. MASZYNY PRĄDU STAŁEGO
5.1. BUDOWA I ZASADA DZIAŁANIA
Maszyny prądu stałego mogą pracować jako prądnice i jako silniki. Zasadę działania
prądnicy prądu przemiennego można wyjaśnić na uproszczonym modelu przedstawionym Na
rys. 5.1.
a)
N
S
V
Ω
e
e
1
1
F
F
Ω
1
1
2
2
─
+
b)
N
S
V
Ω
e
e
2
1
F
F
Ω
1
1
2
1
─
+
c)
e
T
T
2
t
Rys 5.1. Prądnica prądu przemiennego a), b) model maszyny, c) przebieg chwilowy napięcia twornika
W modelu prądnicy przedstawionym Na rys. 5.1 uzwojenie twornika składa sie z ramki,
której końce przylutowane są do dwóch pierścieni. Ramka obracana jest z prędkością kątową
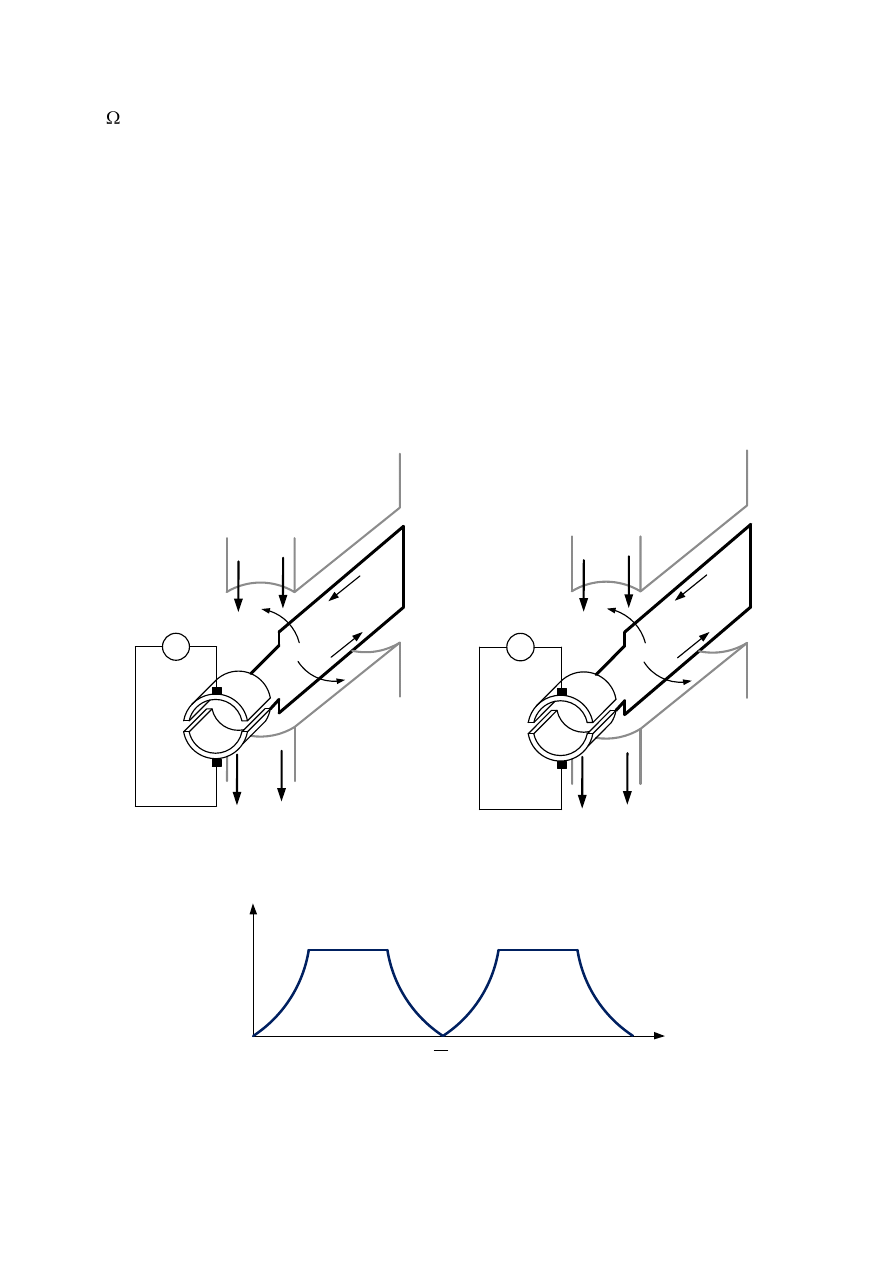
w stałym polu magnetycznym wytworzonym przez dwa magnesy. Do dwóch pierścieni
przyłączony jest woltomierz za pośrednictwem szczotek. Przebieg czasowy napięcia na
woltomierzu w ciągu 1 okresu obrotu wirnika przedstawia Rys. 5.1c. A więc jest to napięcie
o zmiennej biegunowości. Abu utrzymać stałą biegunowość napięcia należałoby dokonać
zmianę przyłączenia woltomierza w chwili gdy napięcie przechodzi przez zero (rys. 5.1b).
Zmianę biegunowości napięcia można uzyskać przy zastosowanych dwóch wzajemnie
odizolowanych półpierścieni (rys. 5.2), uzyskując model prądnicy prądu stałego. Wraz ze
zmiana napięcia indukowanego w bokach ramki zmienia sie układ połączeń szczotek z
współpierścieniami, a tym samym i bokami ramki (rys. 5.2b). Na woltomierzu otrzymuje się
napięcie o zmiennej wartości lecz ostałej biegunowości (rys. 5.2c).
a)
N
S
V
Ω
e
e
1
2
1
2
F
F
Ω
b)
N
S
V
Ω
e
e
2
1
1
2
F
F
Ω
c)
e
T
T
2
t
Rys 5.2. Prądnica prądu stałego a), b) model maszyny, c) przebieg chwilowy napięcia twornika
W modelu przedstawionym Na rys. 5.2 półpierścienie spełniają rolę mechanicznego
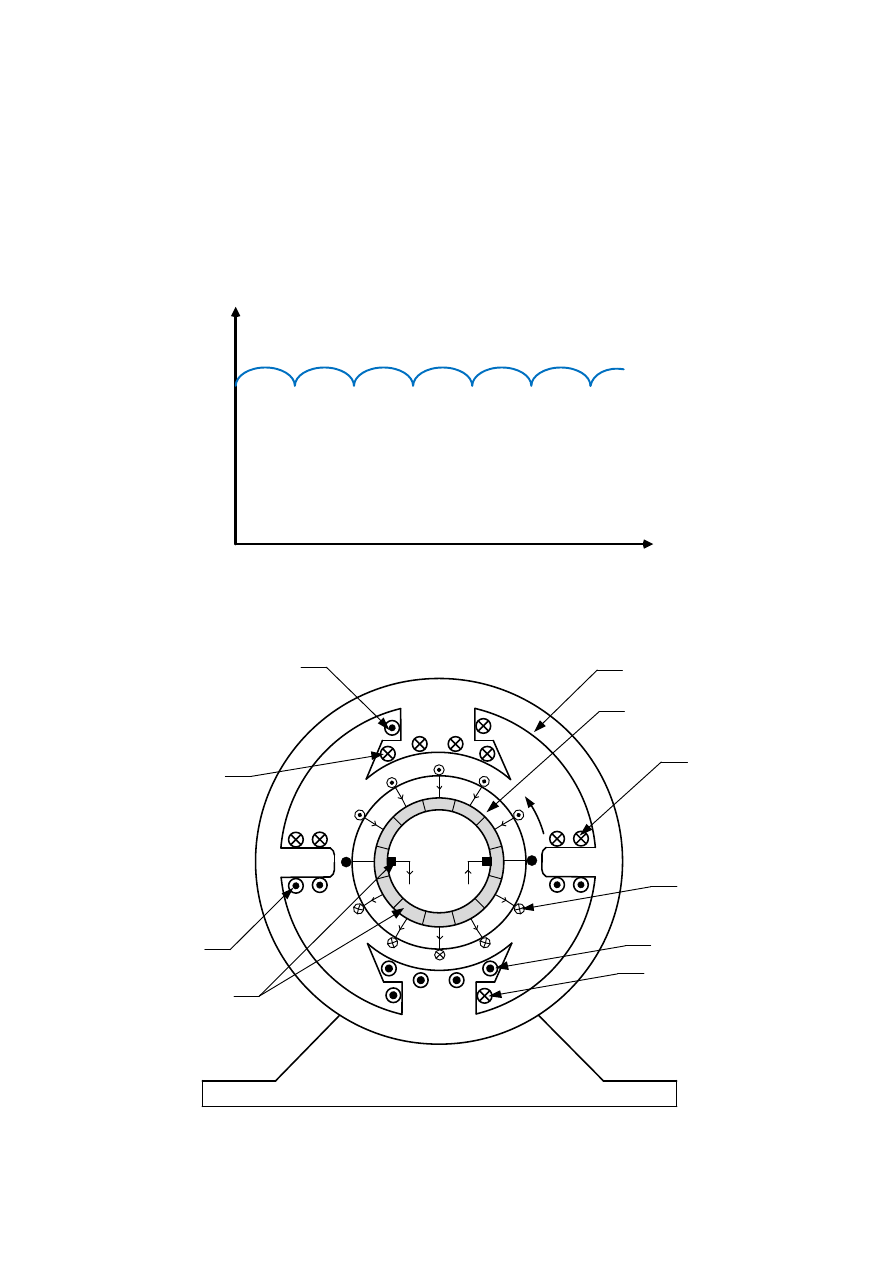
prostownika zwanego komutatorem. Aby otrzymać bardziej wygładzony przebieg czasowy
indukowanego napięcia należałoby wykonać uzwojenie o większej liczbie boków (zwojów)
równomiernie rozłożonym na obwodzie maszyny i przyłączyć je do komutatora o większej
liczbie wycinków. Otrzymuje sie wtedy przebieg czasowy napięcia jak na rys. 5.3.
e
a
t
Rys 5.3. Przebieg czasowy napięcia zarejestrowany na szczotkach komutatora
Na rys. 5.4 przedstawiono zasadę budowy maszyny prądu stałego.
S
S
N
N
1
2
3
4
12
11
10
9
5
6
7
8
─
+
1
2
6
7
4
7
4
6
5
3
Ω
Rys 5.4. Zasada budowy maszyny prądu stałego
Poszczególne elementy maszyna prądu stałego przedstawione na rys. 5.4 oznaczają: 1 -
jarzmo stojana, 2 - wirnik, 3 - komutator, 4 - uzwojenie wzbudzenia umieszczone na
biegunach głównych, 5 - uzwojenie wirnika (twornika), 6 - uzwojenie komutacyjne
umieszczone na biegunach komutacyjnych, 7 - uzwojenie kompensacyjne umieszczone w
nabiegunnikach biegunów głównych.
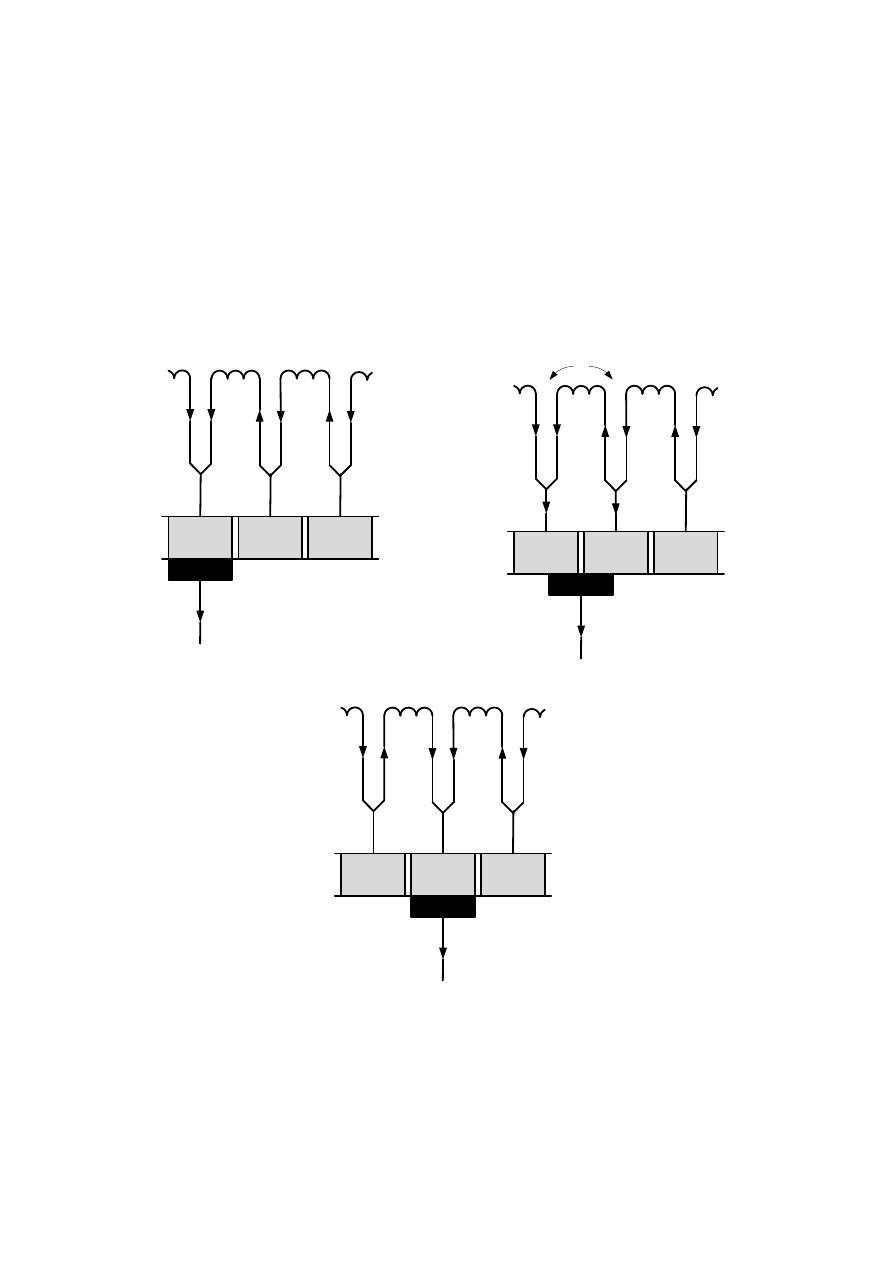
Proces komutacji w uzwojeniu twornika przedstawiono na rys 5.5.
a)
3
2
1
2i
a
i
a
i
a
i
a
b)
3
2
1
i
a
i
k
i
a
2i
a
i
a
i
1
i
2
e
p
e
l
c)
3
2
1
i
a
2i
a
i
a
Rys 5.5. Proces komutacji w uzwojeniu twornika
Prąd płynący przez szczotki w chwili, gdy szczotka przylega do wycinka komutatora jest
równy sumie prądów gałęziowych (rys. 5.5a). Gęstość prądu w szczotce jest równomierna w
całym przekroju szczotki. W chwili gdy szczotka obejmuje dwa wycinki komutatora
(rys. 5.5b) tworzy się zwój zwarty, w którym płynie prąd zwarcia zamykający sie przez
szczotkę, wskutek czego gęstość prądu na jednym krańcu szczotki jest dużo większa niż na
drugim. Może to powodować iskrzenie szczotek, a nawet ogień okrężny na komutatorze. Aby
temu zapobiec w osi szczotek umieszcza sie bieguny komutacyjne, które likwidują strumień
oddziaływania twornika w osi szczotek (rys. 5.5b).
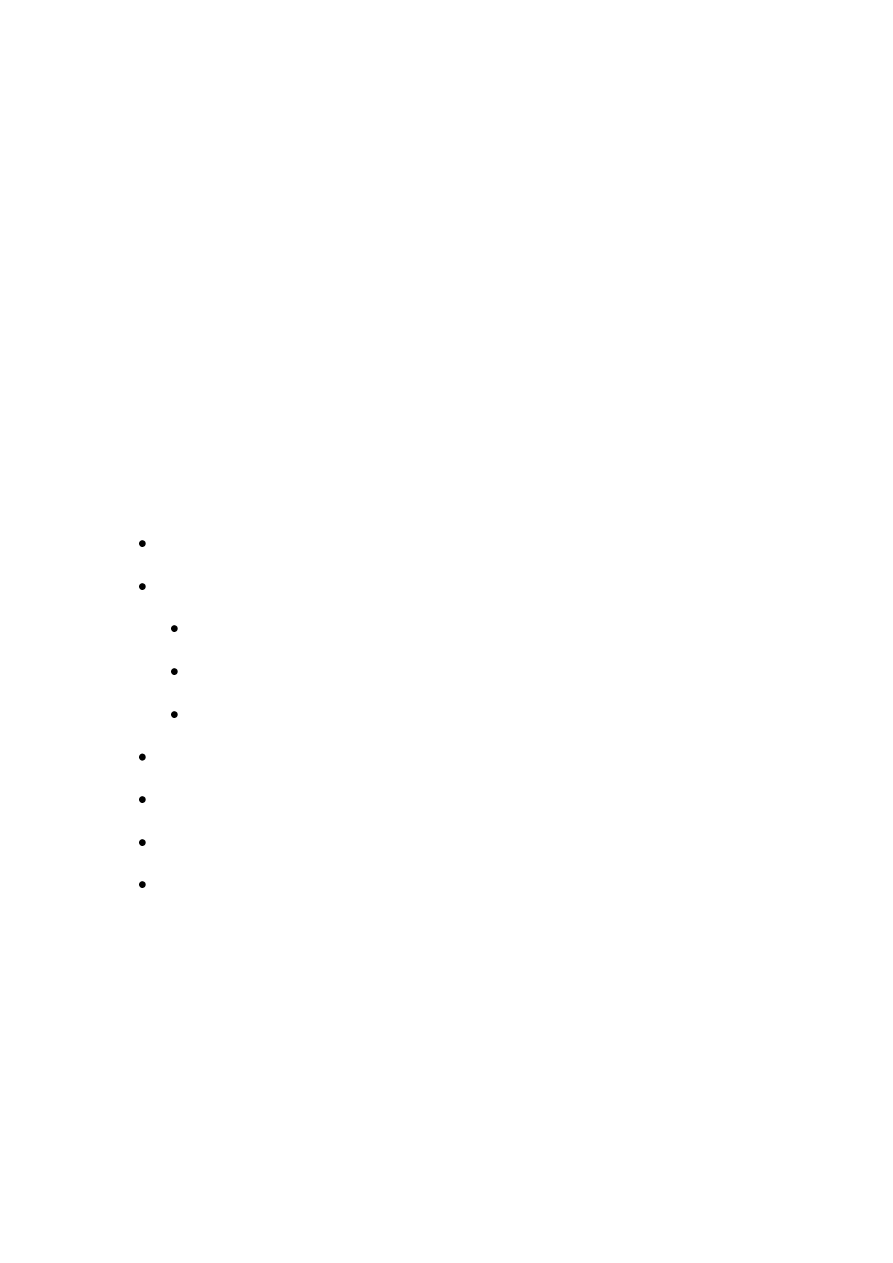
5.2. UKŁADY POŁĄCZEŃ OBWODÓW ELEKTRYCZNYCH
W zależności od sposobu zasilania uzwojenia wzbudzenia maszyny prądu stałego dzieli
się na:
prądnice obcowzbudne,
prądnice samowzbudne,
bocznikowe,
szeregowe,
szeregowo-bocznikowe.
silniki obcowzbudne,:
silniki bocznikowe,
silniki szeregowe,
silniki szeregowo-bocznikowe.
Zaciski uzwojeń oznacza sie następującymi symbolami:
A1, A2 - uzwojenie twornika (wirnika),
B1, B2 - uzwojenie komutacyjne (biegunów pomocniczych),
C1, C2 - uzwojenie kompensacyjne (biegunów kompensacyjnych),
D1, D2 - uzwojenie szeregowe,
E1, E2 - uzwojenie bocznikowe,
F1, F2 - uzwojenie obcowzbudne (zasilone z obcego źródła).
Schemat układu połączeń maszyn prądu stałego w zależności od sposobu połączenia
uzwojenia wzbudzenia przedstawiono na rys 5.6.
a)
B
2
B
1
F
1
F
2
A
1
A
2
b)
B
2
B
1
E
1
E
2
A
1
A
2
c)
B
2
B
1
D
1
D
2
A
1
A
2
d)
B
2
B
1
E
1
E
2
A
1
A
2
D
1
D
2
Rys 5.6. Schemat układu połączeń maszyn prądu stałego: a) obcowzbudnej, b) bocznikowej,
c)szeregowej, d) szeregowo-bocznikowej
5.3. PRĄDNICE PRĄDU STAŁEGO
5.3.1. PRĄDNICA OBCOWZBUDNA
Na rys. 5.7 przedstawiono układ połączeń prądnicy obcowzbudnej prądu stałego.
B
2
I
f
E
I
R
d
B
1
F
1
F
2
n
A
1
A
2
Rys 5.7. Układ połączeń prądnicy obcowzbudnej prądu stałego
Przy rozpatrywaniu własności ruchowych prądnicy prądu stałego zakłada się, że jest ona
napędzana ze stałą prędkością obrotową równą prędkości znamionowej n = n
N
= const. Jeżeli
prądnica nie jest obciążona ( prąd twornika I =0 ) to napięcie na zaciskach prądnicy U jest
równe napięciu indukowanemu E przez strumień wzbudzenia I
f
n
kI
n
k
E
f
(5.1)
Zależność napięcia indukowanego E od prądu wzbudzenia I
f
przy prądzie twornika równym
zeru (I =0) nazywamy charakterystyką biegu jałowego E =f( I
f
) - rys. 5.8. Kształt
charakterystyki biegu jałowego odpowiada charakterystyce magnesowania
=cI
f
obwodu
magnetycznego maszyny.
E
I
f
1
2
E
r
Rys. 5.8. Charakterystyka biegu jałowego prądnicy obcowzbudnej: 1 - przy narastającym prądzie
wzbudzenia, 2 - przy malejącym prądzie wzbudzenia
Podobnie jak charakterystyka magnesowania, tak i charakterystyka biegu jałowego posiada
pętlę histerezy. Przy wartości prądu wzbudzenia równej zeru I
f
= 0, na skutek występowania
w maszynie strumienia remanentu, indukuje się w uzwojeniu twornika napięcie remanentu E
r
.
Wartość napięcia remanentu przy prędkości znamionowej wynosi (2÷5)%U
N
.
Jeżeli prądnica jest obciążona prądem twornika I to napięcie na jej zaciskach U jest mniejsze
od napięcia indukowanego E o spadki napięć Na rezystancji obwodu twornika oraz o spadek
napięcia na szczotkach U
sz
.
sz
U
I
R
E
U
tc
(5.2)
gdzie: R
tc
- rezystancja obwodu twornika, przy czym R
tc
= R
t+
R
bp+
R
k
, R
t
- rezystancja
twornika, R
bp
- rezystancja biegunów komutacyjnych, R
k
- rezystancja biegunów
kompensacyjnych.
Spadek napięcia na szczotkach wynosi około U
sz
2V.
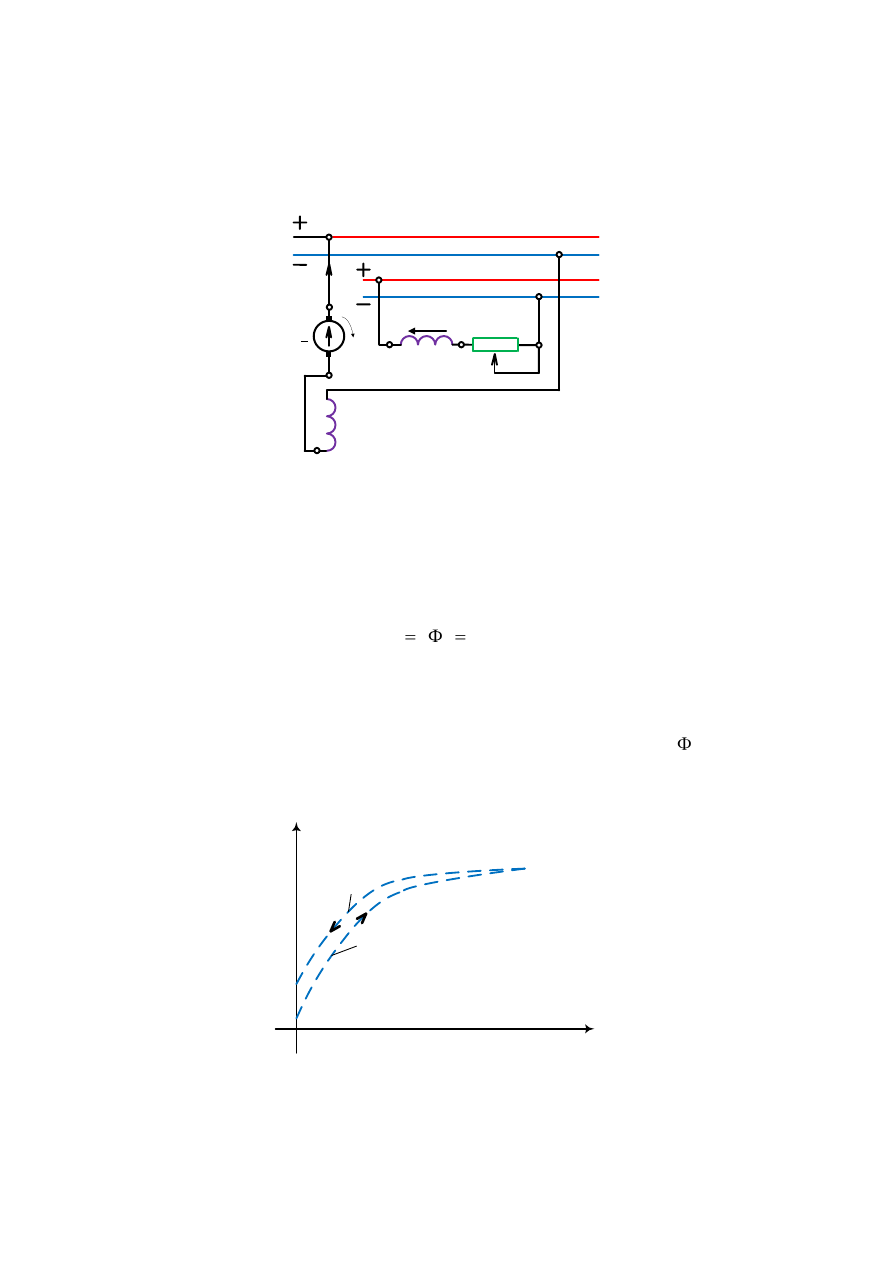
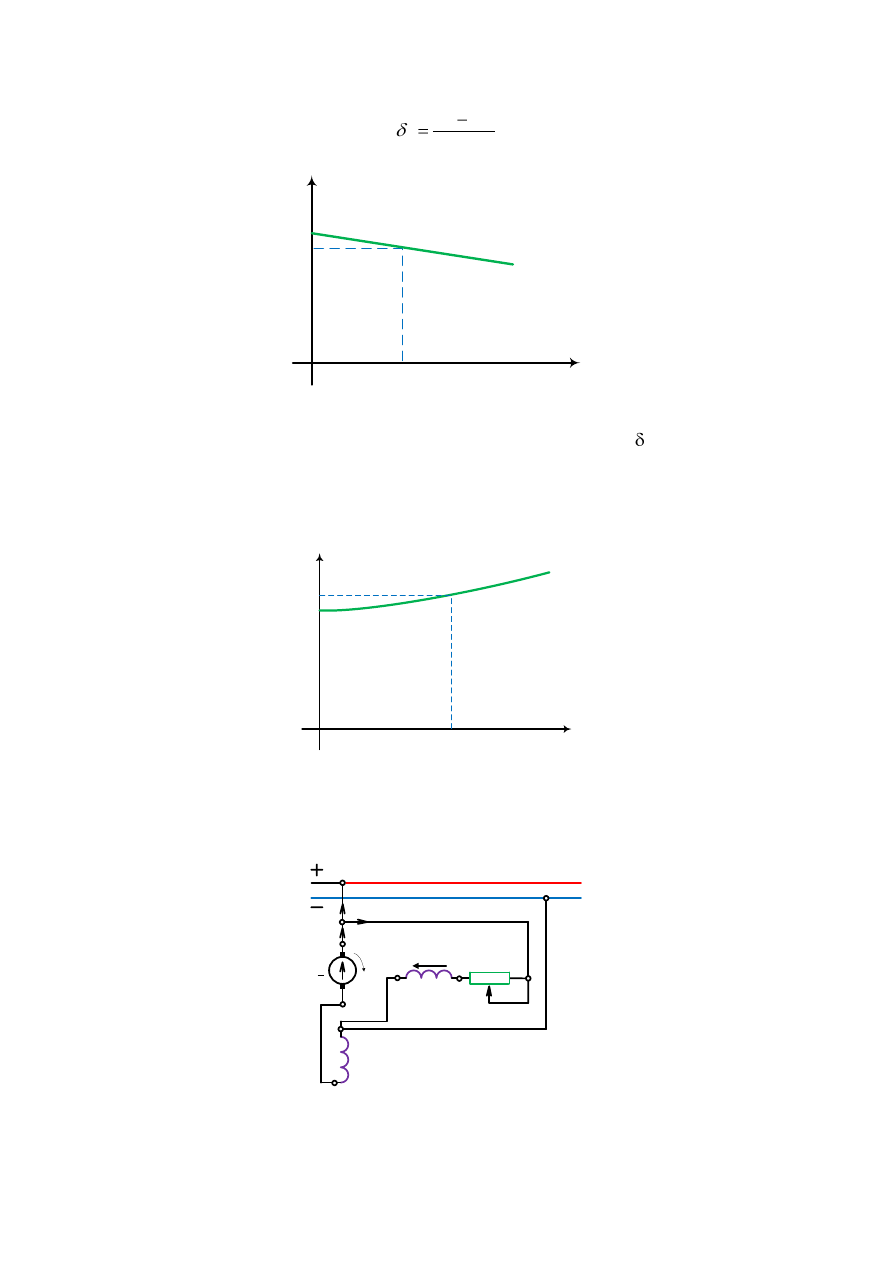
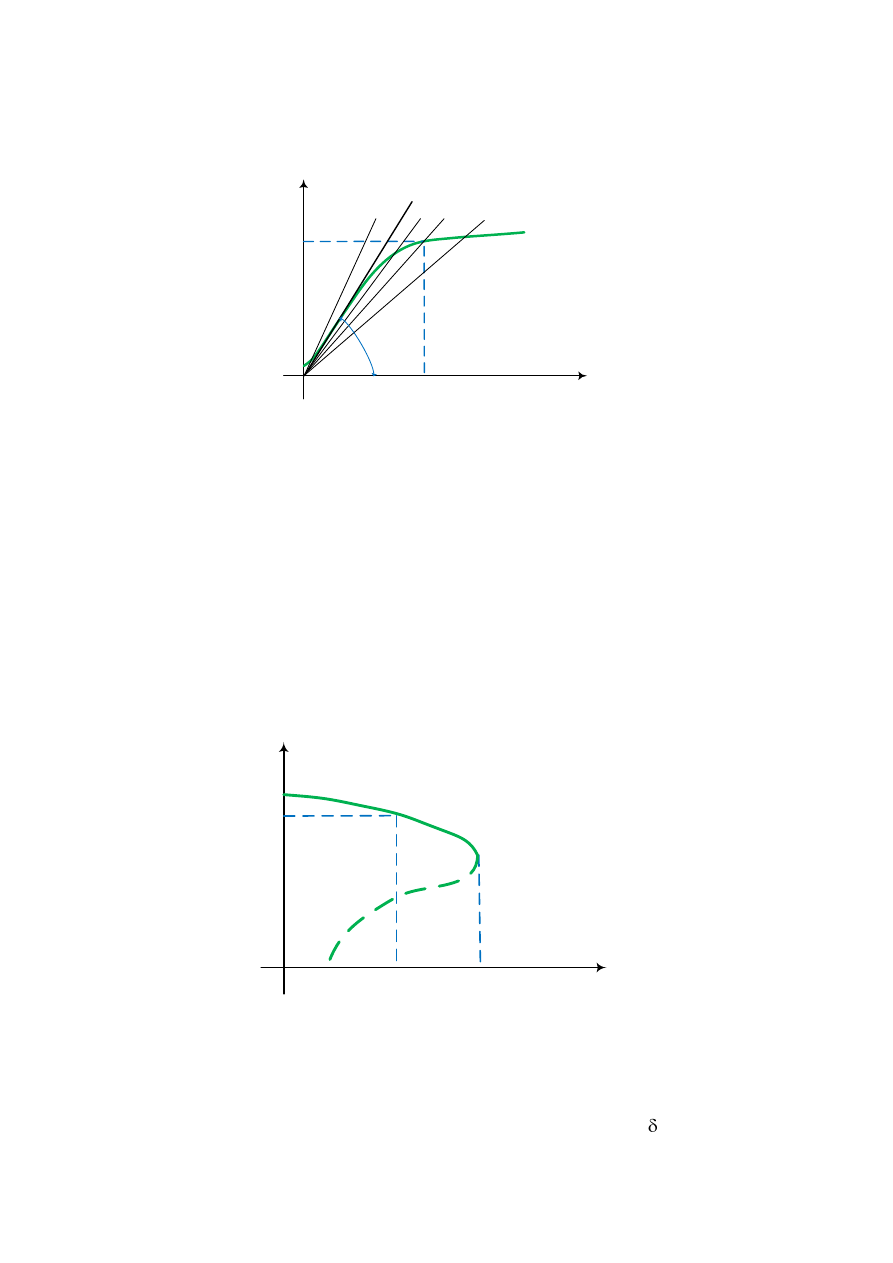
Charakterystyką zewnętrzną prądnicy obcowzbudnej U=f(I) nazywa się zależność
napięcia U na zaciskach twornika od prądu obciążenia (twornika) I, przy stałej prędkości
obrotowej n oraz stałej wartości prądu wzbudzenia I
f
- rys. 5.9.
U
I
Z
E
r
U
N
I
N
U
o
I
Rys 5.9. Charakterystyka zewnętrzna prądnicy obcowzbudnej
Prąd obciążenia przy napięciu U=0 (zwarcie zacisków twornika) nazywa się prądem zwarcia
I
Z
. Prąd zwarcia prądnicy obcowzbudnej skompensowanej wynosi ok. I
z
= (15-20)I
N
.
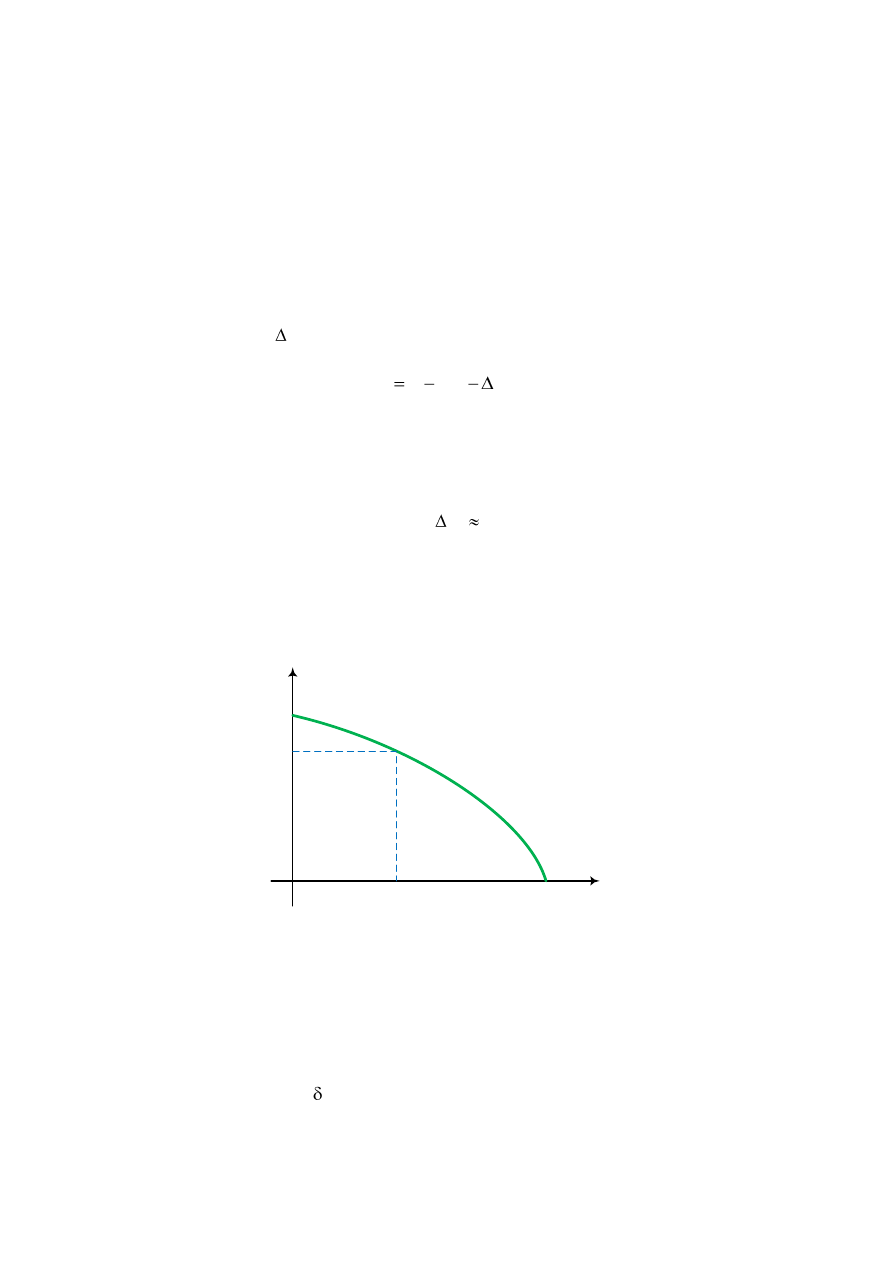
Zmiennością napięcia prądnicy obcowzbudnej nazywa się zmianę napięcia odniesioną
do napięcia znamionowego u, przy przejściu od obciążenia znamionowego do stanu biegu
jałowego - rys. 5.10.
N
N
U
U
U
u
0
(5.3)
U
I
E
r
U
N
I
N
U
o
Rys 5.10. Zmienność napięcia prądnicy obcowzbudnej
Zmienność napięcia dla prądnicy obcowzbudnej zawiera się w granicach u =(0.05÷0.1).
Zależność prądu wzbudzenia I
f
od prądu twornika I czyli I
f
=f(I), U=const oraz n=const
nazywa się charakterystyką regulacji - rys. 5.11.
I
f
I
fN
I
N
I
fo
I
Rys 5.11. Zależność prądu wzbudzenia I
f
od prądu twornika I
5.3.2. PRĄDNICA BOCZNIKOWA
Na rys. 5.12 przedstawiono układ połączeń prądnicy bocznikowej.
B
2
I
f
E
I
R
d
B
1
E
1
E
2
n
I
f
I
a
A
1
A
2
Rys 5.12. Układ połączeń prądnicy bocznikowej prądu stałego
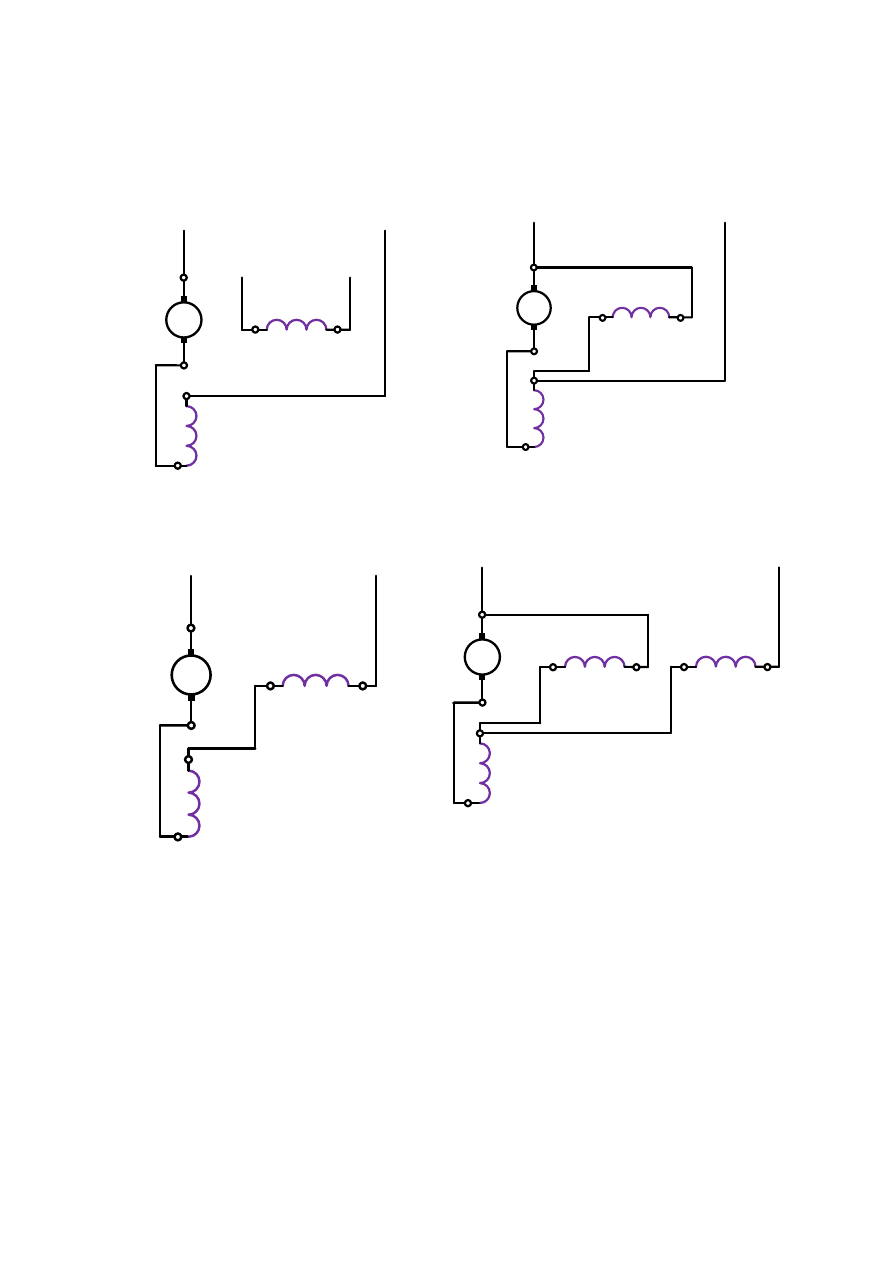
Obwód wzbudzenia prądnicy bocznikowej jest zasilony z jej zacisków A1- B2. Zasadę
wzbudzania sie prądnicy bocznikowej prądu stałego przedstawia Rys. 5.13.
E
I
f
E
r
I
f oN
U
N
a
kr
R
d1
R
d2
=R
k
R
d1
R
d3
R
d4
R
d5
R
d1
>R
d2
>R
d3
>R
d4
>R
d5
Rys 5.13. Zasada wzbudzania się prądnicy bocznikowej prądu stałego
Warunkiem koniecznym samowzbudzenia się prądnicy bocznikowej jest istnienie strumienia
remanentu. Obwód wzbudzenia powinien być połączony względem uzwojenia twornika w
taki sposób aby prąd płynący w obwodzie wzbudzenia wytwarzał strumień magnetyczny
zgodny z kierunkiem strumienia remanentu. Punkt pracy prądnicy bocznikowej ustala się na
przecięciu charakterystyki biegu jałowego prądnicy E=f(I
f
) z charakterystyką obwodu
wzbudzenia U=R
f
I
f
, gdzie R
f
jest rezystancją obwodu wzbudzenia.
Charakterystyką zewnętrzną prądnicy bocznikowej U=f(I) nazywa się zależność
napięcia U na zaciskach twornika od prądu twornika I
a
, przy stałej prędkości obrotowej n oraz
stałej wartości rezystancji obwodu wzbudzenia R
f
- Rys. 5.13.
U
I
a
I
N
U
N
I
z
U
o
I
max
Rys 5.14. Charakterystyka zewnętrzna prądnicy bocznikowej
Zmienność napięcia prądnicy bocznikowej określa się podobnie jak prądnicy
obcowzbudnej z zależności (5.3) i dla prądnicy bocznikowej wynosi około u =(0.2÷0.3).
Charakterystyka regulacji prądnicy bocznikowej I
f
=f(I
a
), przy U=const jest praktycznie
taka sama jak dla prądnicy obcowzbudnej.
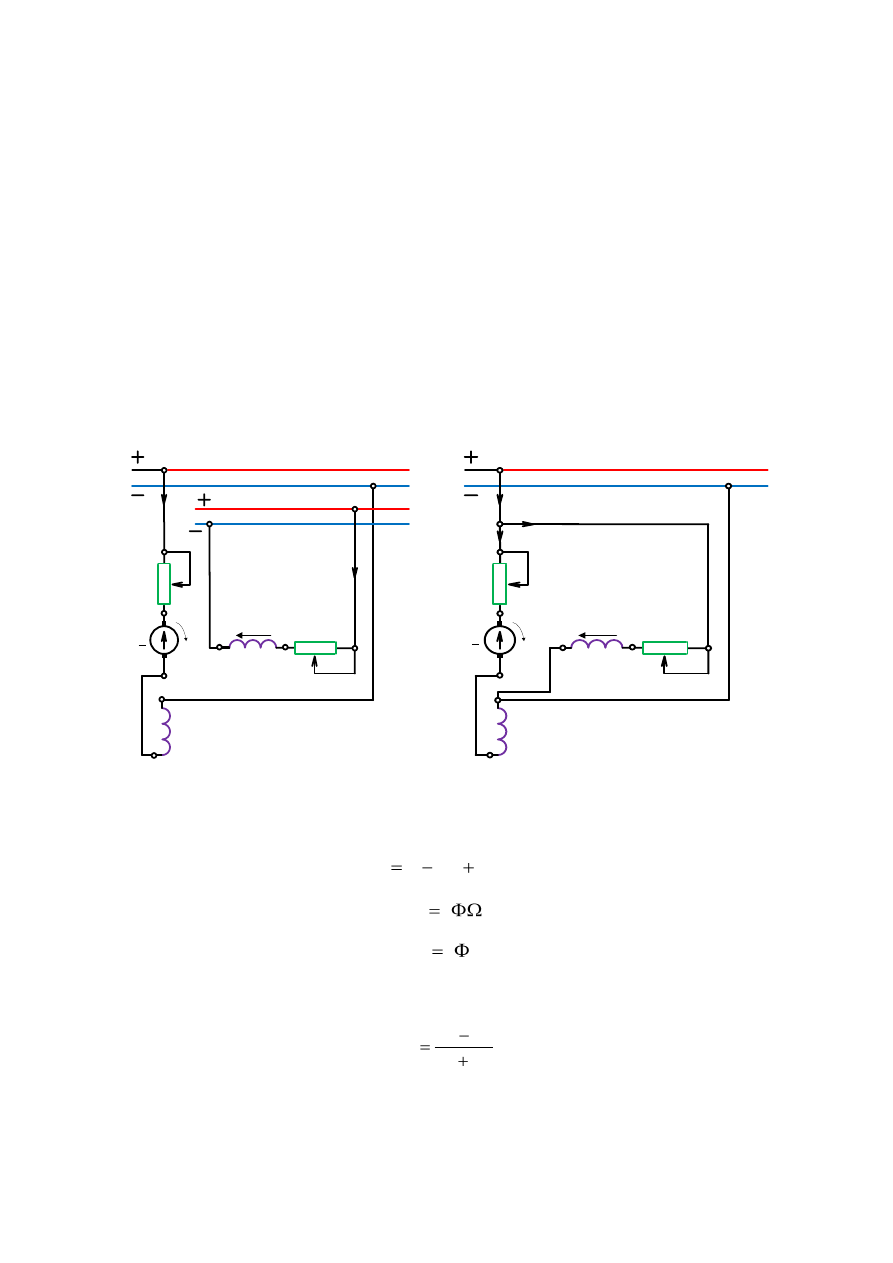
5.4. SILNIKI PRĄDU STAŁEGO
5.4.1. SILNIK OBCOWZBUDNY I BOCZNIKOWY
Przyjmując stała wartość napięcia zasilającego (sieć sztywna), charakterystyki
mechaniczne silnika obcowzbudnego i bocznikowego będą identyczne. Różnica polega
jedynie na sposobie zasilania uzwojeń wzbudzenia. Na rys. 5.15 przedstawiono układ
połączeń silnika obcowzbudnego i bocznikowego prądu stałego.
a)
B
2
I
f
E
R
fd
B
1
E
1
E
2
n
R
d
I
f
A
1
A
2
I=I
a
b)
B
2
F
f
E
I
R
fd
B
1
E
1
E
2
n
R
d
I
f
A
1
A
2
I
a
Rys 5.15. Układ połączeń silnika prądu stałego a) obcowzbudnego, b) bocznikowego
Silnik prądu stałego opisują następujące zależności
a
d
a
I
R
R
U
E
)
(
(5.4)
k
E
(5.5)
a
I
k
M
(5.6)
Z zależności (5.4) wyznacza sie prąd twornika.
d
a
a
R
R
E
U
I
(5.7)
Porównując zależności (5.4) i (5.5) otrzymuje się zależność na prędkość kątową silnika prądu
stałego
a
a
d
a
cI
I
k
R
R
k
U
0
(5.8)
przy czym
0
jest prędkością biegu jałowego, a stała c jest współczynnikiem kierunkowym
prostej.
k
U
0
,
k
R
R
c
d
a
(5.9)
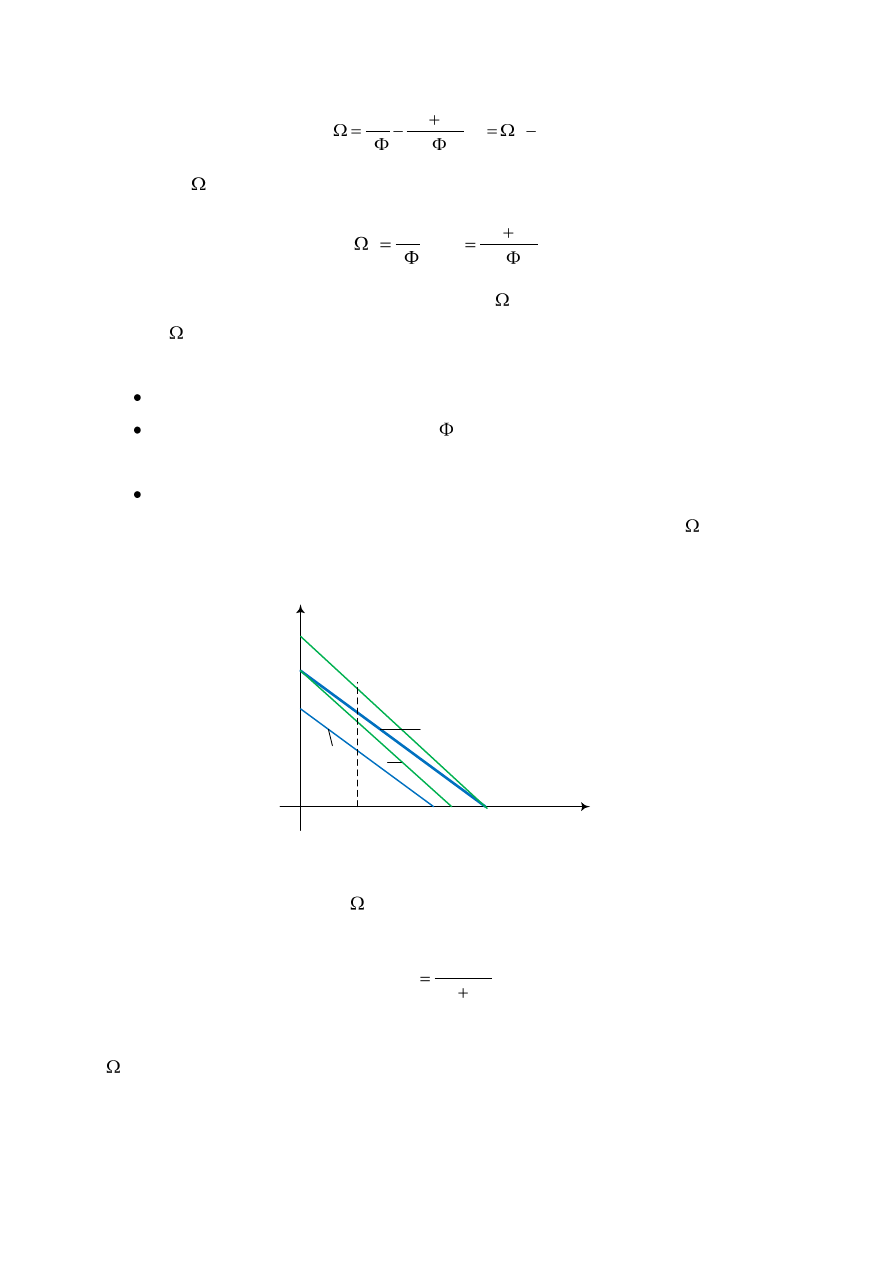
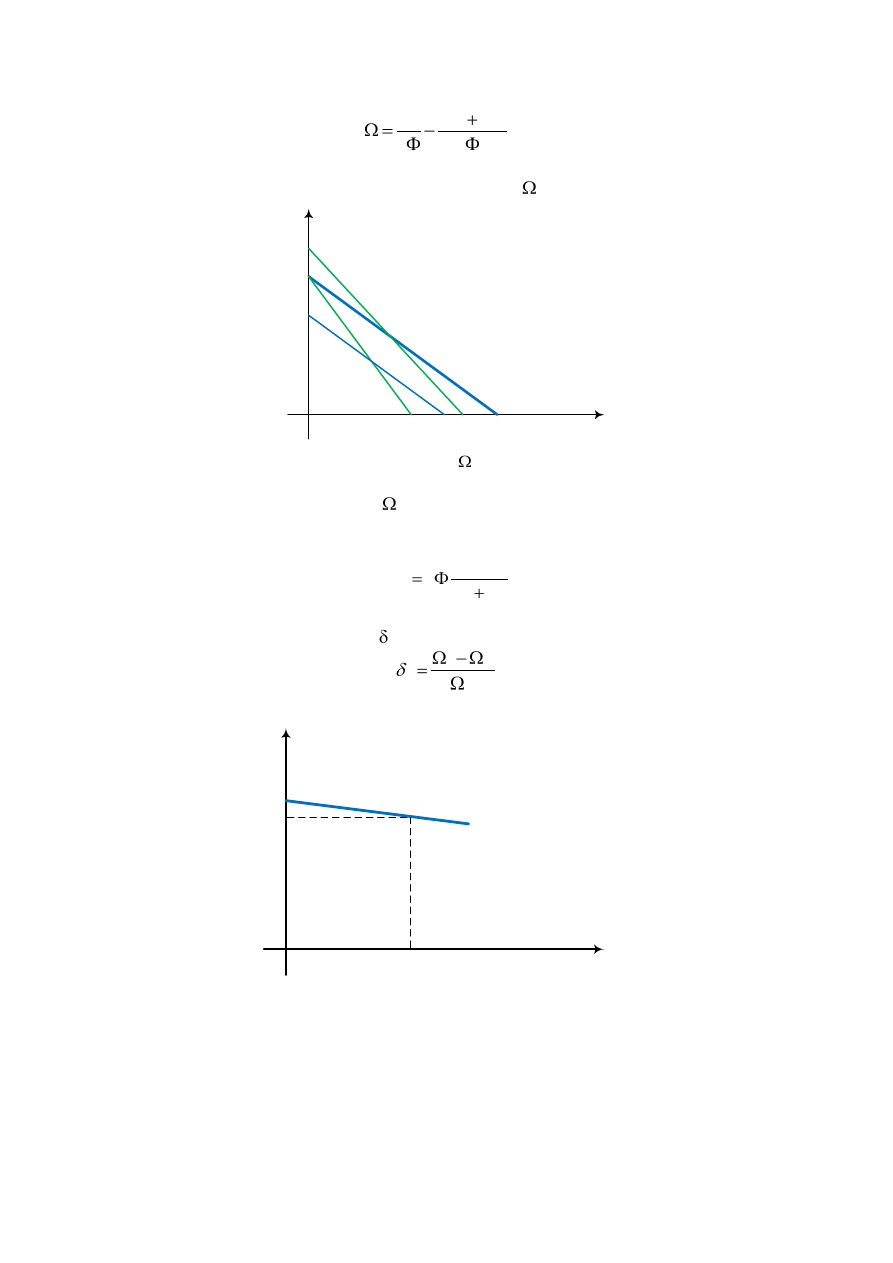
Charakterystyką zewnętrzną silnika obcowzbudnego =f(I
a
) nazywa się zależność prędkości
kątowej od prądu twornika I
a
(rys. 5.16). Z zależności (5.8) wynika, że prędkość kątową
silnika można regulować trzema sposobami:
poprzez zmianę napięcia zasilania uzwojenia twornika U,
poprzez zmianę strumienia wzbudzenia (regulacja prądu wzbudzenia poprzez zmianę
rezystancji obwodu wzbudzenia),
poprzez zmianę rezystancji R
d
obwodu.
Na rys. 5.16 przedstawiono charakterystyki zewnętrzne silnika obcowzbudnego =f(I
a
) dla
trzech sposobów regulacji.
W
I
a
W
oN
I
rN
U
N
,
F
N
, R
d
=0
U<U
N
F
<
F
N
R
d
+
R
a
I
N
Rys 5.16. Charakterystyki zewnętrzne silnika obcowzbudnego
Prąd twornika przy prędkości
=0 nazywany prądem rozruchowym, który zgodnie z
zależnością (5.5) i (5.7) wynosi:
d
a
a
R
R
U
I
(5.10)
Charakterystyka mechaniczna silnika prądu stałego nazywamy zależność prędkości kątowej
od momentu obrotowego. Uwzględniając zależności (5.6) i (5.8) otrzymuje się:
M
k
R
R
k
U
d
a
2
)
(
)
(
(5.11)
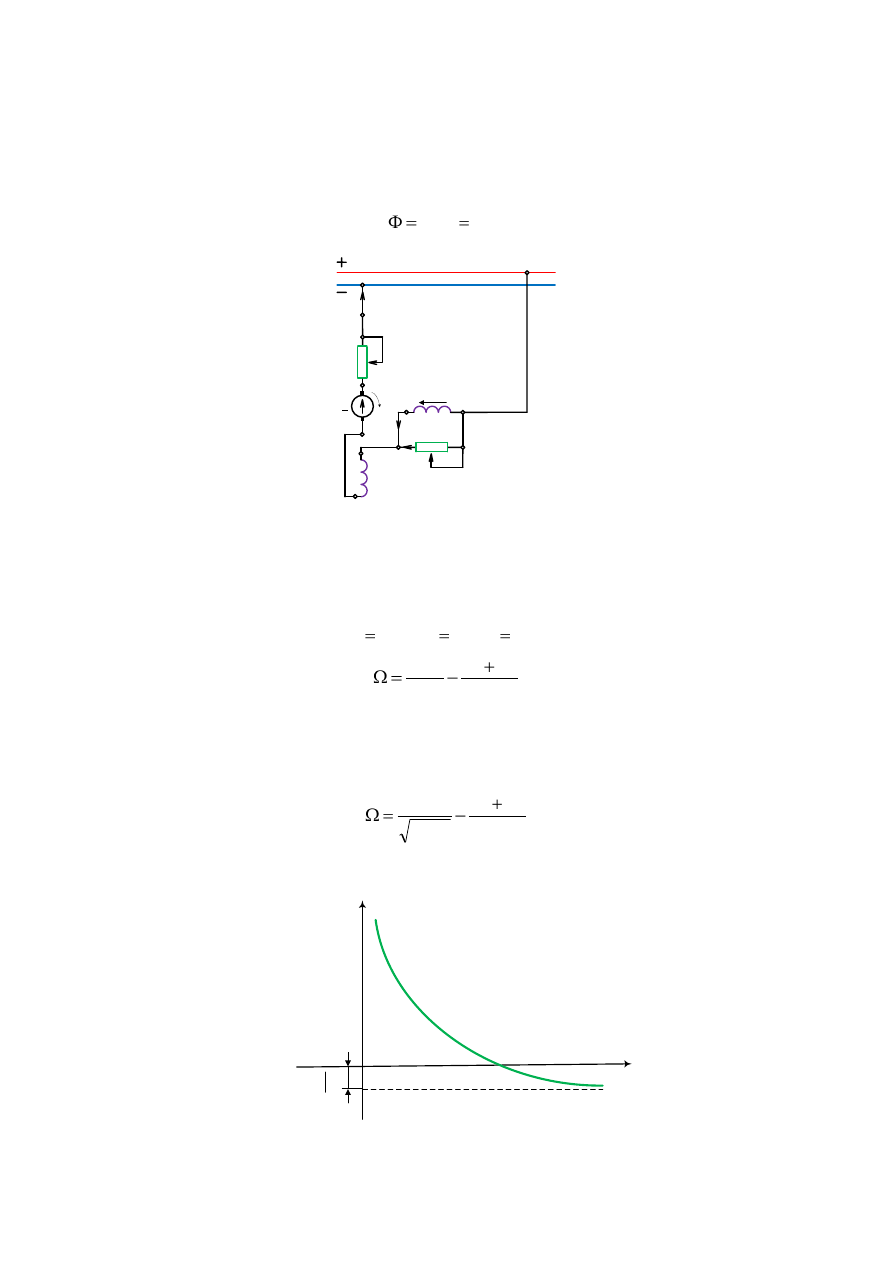
Na rys. 5.17 przedstawiono charakterystyki mechaniczne =f(M) dla silnika obcowzbudnego.
W
M
W
oN
M
rN
U
N
,
F
N
, R
d
=0
U<U
N
F
<
F
N
R
d
¹0
Rys 5.17. Charakterystyki mechaniczne =f(M) dla silnika obcowzbudnego.
Moment obrotowy przy prędkości
=0 nazywany momentem rozruchowym M
r
, który
zgodnie z zależnością (5.6) i (5.10) wynosi:
d
a
r
R
R
U
k
M
(5.12)
Zmienność prędkości kątowej silnika n (rys. 5.17) określa się zależności.
N
N
n
0
(5.13)
W
I
a
W
o
I
N
W
N
Rys 5.18. Zmienność prędkości kątowej silnika obcowzbudnego.
5.4.2. SILNIK SZEREGOWY
Uzwojenie wzbudzenia w silniku szeregowym jest połączone w szereg z uzwojeniem
twornika, czyli prąd wzbudzenia jest jednocześnie prądem twornika (rys. 5.19.). A więc
a
f
f
f
I
c
I
c
(5.14)
B
2
F
f
E
I
B
1
E
1
E
2
n
R
d
I
f
A
1
A
2
R
b
I
b
Rys 5.19. Układ połączeń silnika szeregowego.
Podstawiając zależność (5.14) do równań (5.6) i (5.8) otrzymuje się:
2
2
a
M
a
f
a
a
f
I
k
I
kc
I
I
kc
M
(5.15)
M
d
a
a
M
k
R
R
I
k
U
(5.16)
gdzie k
M
= kc
f
.
Wyznaczając z zależności (5.15) prąd twornika I
a
i wstawiając do zależności (5.16) otrzymuje
sie wyrażenie na charakterystykę mechaniczną silnika szeregowego.
M
d
a
M
k
R
R
M
k
U
(5.17)
Na rys. 5.20 przedstawiono charakterystykę mechaniczną silnika szeregowego.
W
I
a
R
a
k
M
I
r
Rys 5.20. Charakterystyka mechaniczna silnika szeregowego
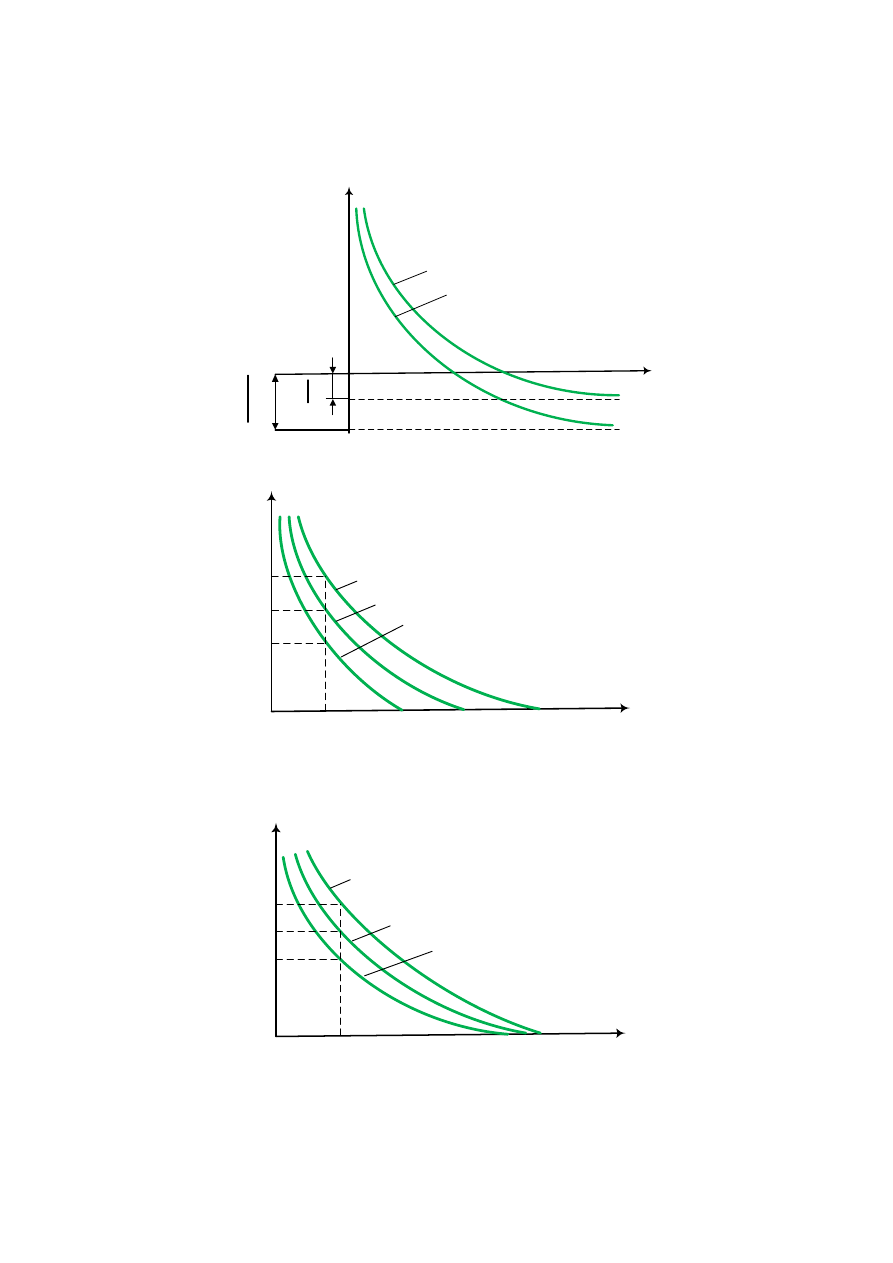
Na rys. 5.21 przedstawiono charakterystyki mechaniczne dla różnych sposobów regulacji
prędkości obrotowej silnika szeregowego
a)
W
I
a
R
a
k
M
R
a
+R
d
k
M
R
d
=0
R
d
>0
b)
W
I
a
U
N
U
1
U
2
I
a
=I
m
W
W
1
W
2
U
N
>U
1
>U
2
I
az2
I
az1
I
az
c)
W
I
a
R
b2
I
a
=I
m
W
W
1
W
2
I
r1
R
b1
R
b
=
¹
R
b2
<R
b1
I
r
I
r2
Rys 5.21. Charakterystyki mechaniczne dla różnych sposobów regulacji prędkości obrotowej silnika
szeregowego: a) regulacja poprzez zmianę R
d
w obwodzie twornika, b) regulacja poprzez zmianę
napięcia zasilającego, c) regulacja poprzez bocznikowanie uzwojenia wzbudzenia.

LITERATURA
[1]
Bajorek Z.: Maszyny elektryczne
, WNT, Warszawa 1983
[2]
Chapman S.J.: Electric machinery fundamentals, Third Edition, McGraw-Hill Book Company,
Singapore 1999.
[3]
Fitzgerald A. E., Kingsley Ch. Jr., Stephen D. Umans S.D.: Electric machinery, Sixth edition,
McGraw-Hill, USA, New York, 2003.
[4]
Gieras J.F., Wing M.: Permanent magnet motor technology. Design and Application, Second
Edition, Marcel Dekker Inc., New York 2002.
[5]
Krause P.C.: Analysis of electric machinery, McGraw-Hill Book Company, New York 1986.
[6]
Kurdziel R.: Podstawy elektrotechniki, WNT, Warszawa 1972
[7]
Latek W.: Teoria maszyn elektrycznych, WNT, Warszawa 1987
[8]
Plamitzer A.: Maszyny elektryczne
, WNT, Warszawa 1982

Projekt „Program Rozwojowy Potencjału Dydaktycznego Politechniki Świętokrzyskiej w Kielcach: kształcenie na miarę sukcesu”
Program Operacyjny Kapitał Ludzki Priorytet IV Działanie 4.1 Poddziałanie 4.1.1
Umowa UDA-POKL.04.01.01-00-175/08-03
Politechnika Świętokrzyska
25-314 Kielce
Al. Tysiąclecia Państwa Polskiego 7
Biuro Projektu - bud. A pok. 15
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Wyszukiwarka
Podobne podstrony:
Maszyny elektryczne 04 MASZYNY SYNCHRONICZNE i PRADU STALEGO
Maszyna komutatorowa pradu stalego
Maszyna komutatorowa pradu stalego
Maszyna komutatorowa pradu stalego
podbielska,elektroniczna aparatura medyczna, Wpływ prądu stałego na tkanki
SILNIK BOCZNIKOWY- 3.2 moje, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.
3, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.2 BADANIE SILNIKA BOCZNIKO
Silnik szeregowy prądu stałego , LABORATORIUM MASZYN ELEKTRYCZNYCH
Bocznikowa prądnica prądu stałego, LABORATORIUM MASZYN ELEKTRYCZNYCH
głogowski,elektrotechnika, MASZYNY PRĄDU STAŁEGO
BADANIE MASZYN ELEKTRYCZNYCH PRĄDU STAŁEGO, POLITECHNIKA ˙WI˙TOKRZYSKA
Badanie prądnicy prądu stałego v5, Laboratorium Maszyn Elektrycznych
Badanie prądnicy prądu stałego v5, Laboratorium Maszyn Elektrycznych
Maszyny Elektryczne 2 (sem IV) Zasada działania silnika i prądnicy prądu stałego
ćw.1.Przygotowanie do pracy maszyny prądu stałego, Elektrotechnika - notatki, sprawozdania, Maszyny
ćw.3.Badanie prądnicy prądu stałego, Elektrotechnika - notatki, sprawozdania, Maszyny elektryczne, s
Badanie silnika szeregowo-bocznikowego prądu stałego, Elektrotechnika, Rok 3, Maszyny elektryczne
Silnik szeregowy prądu stałego, ۞ Nauka i Technika, Elektrotechnika, Maszyny elektryczne
więcej podobnych podstron