908
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 47, NO. 4, AUGUST 2000
Induction-Generator-Based System Providing
Regulated Voltage with Constant Frequency
Enes Gonçalves Marra, Associate Member, IEEE, and José Antenor Pomilio, Member, IEEE
Abstract—The electrical characteristics of an isolated induc-
tion-generator-based system are improved through the association
with a voltage-source pulsewidth modulation (PWM) inverter. The
electronic converter allows the achievement of a better system be-
havior in many aspects: voltage regulation, frequency stabilization,
and reactive power compensation. The system operation strategy
consists of maintaining constant synchronous frequency at the in-
duction generator via an association with a PWM inverter. The
system power balance and the generator voltage regulation may be
accomplished by two different means: through the rotor speed reg-
ulation, or by sending part of the energy stored in the inverter dc
side to the grid through a single-phase line, in case the rotor speed
is not regulated and a single-phase grid connection is available. The
obtained results demonstrated the system is stable, robust, and an
effective source of regulated three-phase voltages.
Index Terms—Energy conversion, energy resources, induction
generator, pulsewidth modulation inverter.
I. I
NTRODUCTION
I
T IS FREQUENTLY stated that cage rotor induction ma-
chines (IMs) are robust, inexpensive compared with dc and
wound-rotor synchronous machines, require little maintenance,
and have high power-weight ratio (W/kg). Despite these favor-
able features, IM’s are hardly employed as generators due to
their unsatisfactory voltage regulation and frequency variation,
even when driven under constant speed and feeding loads which
consume active power [1], [2].
Wound-rotor synchronous generators are reliable suppliers
of regulated three-phase constant frequency voltage, provided
the dynamic response of the speed governor is able to main-
tain constant rotor velocity during the occurrence of load power
variations. Nevertheless, they are expensive machines due to
the maintenance required by the excitation system, which con-
tains slip rings, brushes, or rotating rectifiers, in addition to field
current control circuits. Therefore, a cost-effective and techni-
cally reliable alternative to wound-rotor synchronous generators
would be welcome.
The aim of this investigation is to propose an induction gen-
erator (IG) application as an alternative to wound-rotor syn-
chronous generators to be employed in low-power isolated gen-
Manuscript received February 12, 1999; revised September 20, 1999. Ab-
stract published on the Internet April 21, 2000. This work was supported by
Coordenação para o Aperfeiçoamento de Pessoal de Ensino Superior (CAPES)
and Fundação de Amparo à Pesquisa do Estado de São Paulo (FAPESP).
E. Gonçalves Marra is with the School of Electrical Engineering, Federal
University of Goiás, 74605-220 Goiânia, Brazil (e-mail: enes@ieee.org).
J. Antenor Pomilio is with the School of Electrical and Computer Engi-
neering, State University of Campinas, 13081-970 Campinas, Brazil (e-mail:
antenor@dsce.fee.unicamp.br ).
Publisher Item Identifier S 0278-0046(00)06814-3.
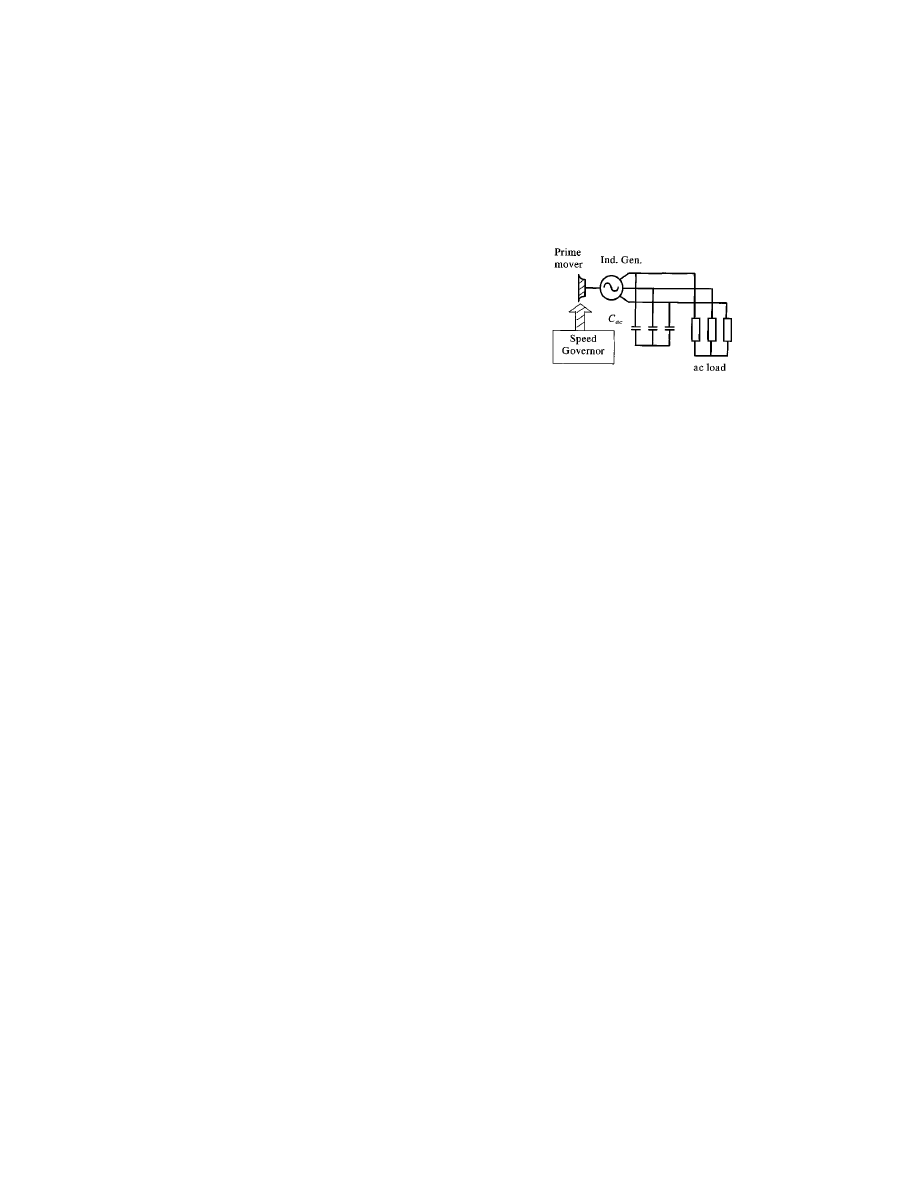
Fig. 1.
Capacitor-excited IG system, isolated from the utility grid.
eration systems, such as low-head microhydroelectric plants and
fuel engine driven generation systems. Two distinct structures
are presented. In one of these structures, the generator’s shaft
speed is regulated. The other structure does not comprise speed
governor, and the system acts as cogenerator, sending energy
to a single-phase grid, as a strategy to control the IG terminal
voltage.
The cogenerator structure is appropriate to be employed in
areas such as light manufacturing or agricultural areas where
electric power available is only single phase. Customers in these
areas may request three-phase power from the utility and find it
is uneconomical for the utility to meet a relatively small three-
phase need [3], [4].
Both proposed systems are intended to be sources of regu-
lated voltage with constant frequency, whose energy quality
is good enough to feed sensitive loads, such as micropro-
cessor-controlled ones.
II. I
SOLATED
C
APACITOR
-E
XCITED
IG S
YSTEM
Fig. 1 presents a system in which a capacitor-excited IG op-
erates isolated from the utility grid. In this circumstance, the ac-
tive power of the ac load affects considerably the amplitude and
the frequency of the voltage at the IG terminals. In this case, the
synchronous frequency is not constant, even if the rotor speed
is kept constant by the action of a speed governor.
Assuming that the mechanical, electrical, and magnetic losses
are negligible, the electric power converted by the generator is
given by the product between the rotor speed and the generator
torque.
Supposing the rotor speed is invariable, the increase of the
active power required by the ac load yields a drop in the stator
frequency, as it is the only possible way the IG can raise its rotor
slip frequency and consequently elevate the torque, so that it is
able to suit the load power demand.
Fig. 2 illustrates qualitatively a situation in which the induc-
tion generator was feeding a unity power-factor load so that the
steady-state operation point is “A.” The synchronous frequency
0278–0046/00$10.00 © 2000 IEEE
MARRA AND POMILIO: IG-BASED SYSTEM
909
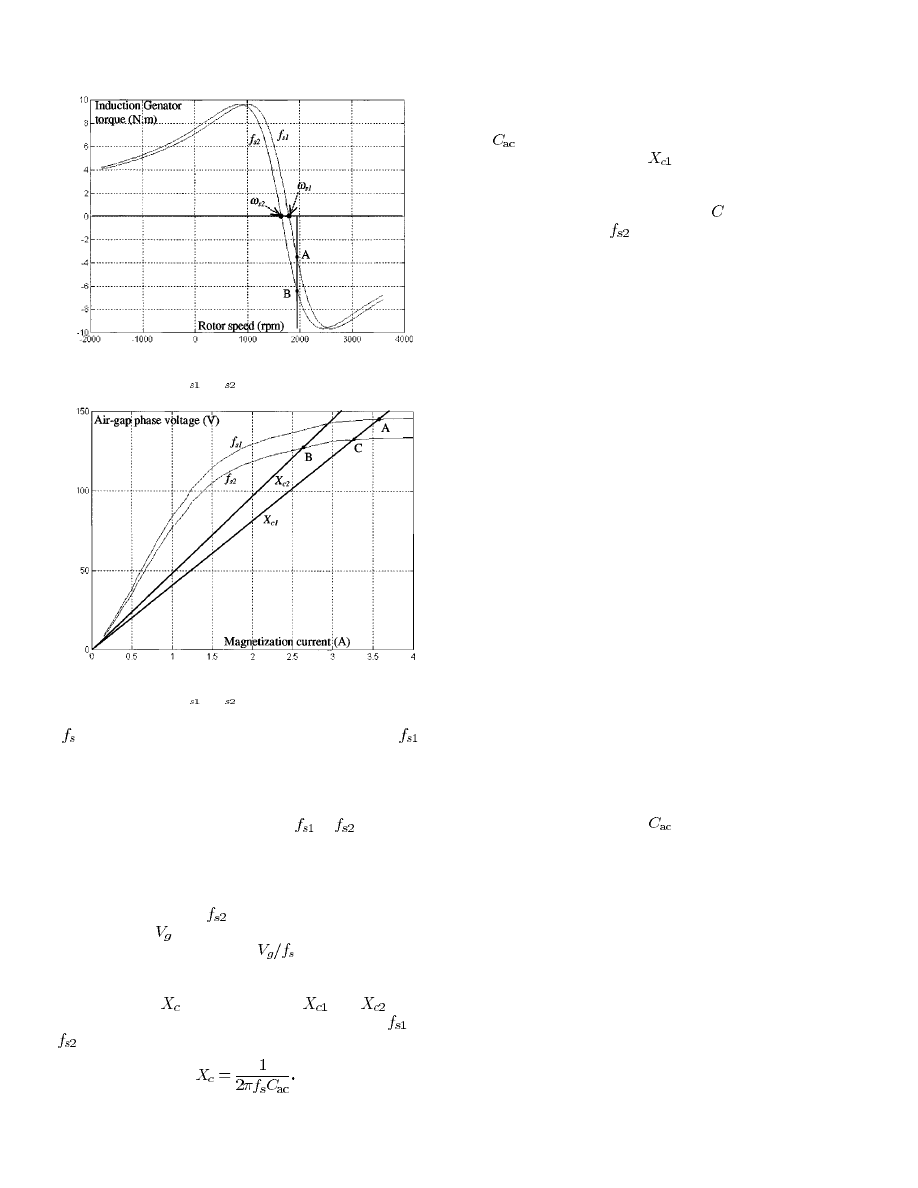
Fig. 2.
Torque-speed characteristics of the induction generator, for different
synchronous frequencies (
f > f ).
Fig. 3.
Magnetization characteristics of the induction generator, for different
synchronous frequencies (
f > f ).
(
) of the stator magnetomotive force (MMF) is equal to
in
point “A.” The point “A” of the IG torque characteristic (Fig. 2)
corresponds to an equivalent steady-state point “A” in the gen-
erator magnetization characteristic, as shown in Fig. 3.
When the active power required by the ac load increases, the
synchronous frequency decreases from
to
, producing a
torque increment to match the higher power demand. Thus, the
new stable steady-state operation point is steered to point “B.”
Notice that the speed governor is supposed to maintain the rotor
speed constant.
The frequency drop to
reduces the magnetization-charac-
teristic voltage (
) in the same proportion, assuming that the
air-gap flux is kept constant, i.e.,
is constant.
In addition to the change in the magnetization characteristic,
the frequency reduction affects the capacitive reactance of the
excitation bank (
), according to (1).
and
are the
capacitive reactance correspondent to the frequencies
and
, respectively,
(1)
Altogether, the resulting effect of increasing the ac load ac-
tive power is the IG terminal-voltage reduction, due to changes
in the magnetization characteristic and in the excitation bank ca-
pacitive reactance.
The
capacitance could be increased even more, in order to
recover the capacitive reactance
. In this case, the slope of
the capacitor-bank voltage characteristic will return to its pre-
vious value, however, the steady-state operation point in the
magnetization characteristic will now be “ ” instead of “A,”
as the frequency remains
. The new operation point at the
torque characteristic (Fig. 2) would depend on the behavior of
the ac load under voltage variations.
It should be highlighted that the voltage drops at the stator and
rotor resistance and leakage reactances are not the main cause
of the poor voltage and frequency regulation in the isolated IG.
The fundamental factor that affects the IG voltage regulation is
the influence of the frequency on the generator magnetization
characteristic.
Note that the voltage and frequency variations presented pre-
viously were caused by increments made exclusively in the ac
load active power. In case the ac load inductive reactive power
increases, the voltage reduction would be even higher, due to the
demand of capacitive reactive power from the excitation bank to
compensate for that.
Reductions at the rotor speed as a result of torque elevations,
due to a nonregulated shaft speed, would degenerate voltage and
frequency even more.
Substantial efforts have been made to overcome the poor
voltage regulation of the isolated induction generator under load
active and reactive power variations [5]. These efforts have been
concentrated on different types of voltage regulators acting
as volt–ampere-reactive controllers, based on series-shunt
capacitor compounds [1], [5]–[8], switched discrete capacitor
banks [9]–[11], thyristor-switched inductors [12], or saturated
reactors [13], [14]. Such approaches rely on contactors, relays,
or semiconductor switches.
Although the methodologies mentioned attain valuable im-
provement in voltage regulation, they have solved the problem
only partially, as the frequency is yet variable. Besides that, the
generator still experiences variation in its magnetization char-
acteristic with the frequency, which leads to the requirement of
a wide range of capacitance values at the excitation bank. How-
ever, an excessive increase in the
capacitance would deeply
saturate the generator, leading to voltage waveform distortions.
This analysis leads to the conception of a strategy which
maintains constant frequency at the IG stator terminals and,
simultaneously, guarantees reactive power both to magnetize
the generator and to compensate for the ac load demand.
The
constant-frequency
approach
ensures
that
the
steady-state operation of the IG will take place following
only one torque and magnetizing characteristic curves, both
regarding the constant stator synchronous frequency.
A generation system based on this modus operandi has to
comprise three indispensable parts, namely, the induction gen-
erator itself, a voltage regulator, and a device which fixes the
frequency, magnetizes the generator, and compensates for the
ac load reactive power requisites.
It is important to mention that a constant-frequency system
like this is suitable to work driven by energy sources which
cause relatively narrow ranges of speed variations, such as
910
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 47, NO. 4, AUGUST 2000
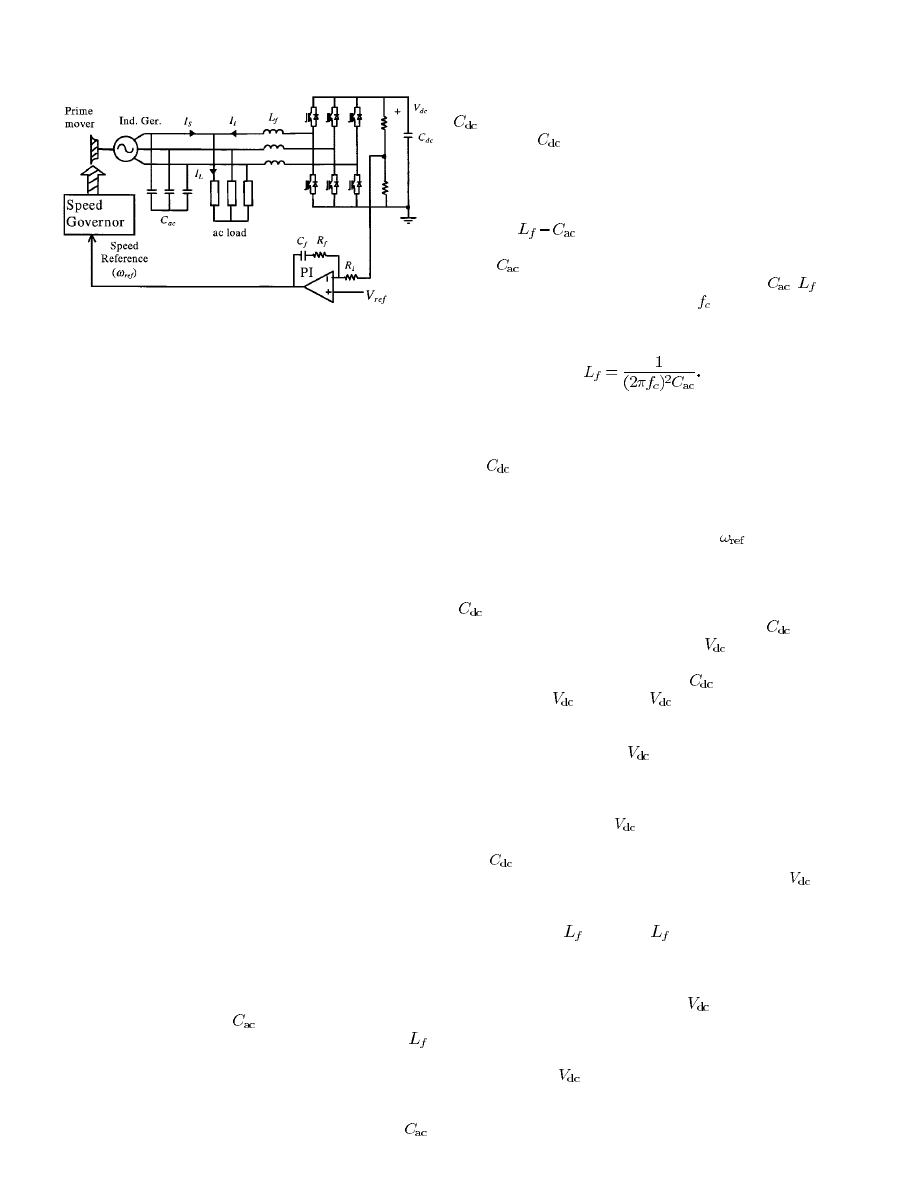
Fig. 4.
Controlled-speed-based system configuration.
microhydroelectric plants and fuel engine plants. Therefore,
this approach is not adequate for systems where the speed
variation is the basis to achieve profitable energy conversion,
such as wind systems.
III. D
ESCRIPTION OF THE
P
ROPOSED
S
YSTEMS
Two distinct structures which are able to produce balanced
three-phase regulated voltages with constant frequency are pre-
sented. Both structures employ induction generator associated
with voltage-fed pulsewidth modulation (PWM) inverters, in
order to establish constant frequency at the IG stator ends.
One of the proposed configurations does not include a speed
governor, as the elimination of the speed control yields a quite
significant economy in the overall cost of the system. In this
case, the IG voltage regulation is attained by consuming all ex-
ceeding power, as the speed-governor absence does not allow
control of the amount of the generated power. In this case, the
excess of energy, which is not consumed by the ac load, is sent
to the utility grid via a single-phase line. This configuration is
able to be applied in sites where there is availability of enough
hydraulic energy source and a single-phase line connection to
grid.
The other proposed configuration employs the speed gov-
ernor, in order to control the amount of the generated energy.
This structure is more suitable to be applied in small fuel-en-
gine-driven generation systems.
The main goal of both proposed configurations is to feed
the ac loads with satisfactory energy quality, which means pro-
viding three-phase balanced voltages, with constant frequency,
sinusoidal waveform, and regulated amplitude.
A. Controlled-Speed-Based System
The controlled-speed-based system configuration is in-
herently composed of an induction generator excited by a
three-phase capacitor bank (
), connected to the ac side of
a voltage-fed PWM inverter through series inductances (
).
The rotor shaft speed is controlled by a speed governor, as
presented in Fig. 4.
The system is isolated from grid and the starting is accom-
plished from the self-excitation produced by the interaction be-
tween the residual flux voltage and the ac capacitive bank (
).
After startup, the IG provides the energy required to charge
and to supply the losses. The PWM inverter control circuit
is also fed by
, by means of a forward dc–dc converter.
The fundamental frequency of the PWM inverter output
voltage is maintained constant at 60 Hz, yielding a constant-fre-
quency busbar at the IG leads.
The IG terminal voltage waveform is sinusoidal due to the ac-
tion of the
filter, which attenuates the high-frequency
voltage components.
The
capacitance is rated to match the IG self-excitation
requisites during the startup. After the definition of
,
is
rated to set the filter cutoff frequency (
) (for example, one
decade below the switching frequency of the PWM inverter) as
in
(2)
The speed governor role is to set rotor speed so that the IG
produces enough power to supply the ac loads, the system
losses, and the PWM inverter control circuits, as well as to
keep
properly charged.
In this system, the rotor speed is variable and has to be set
to suit the IG power requirements, conversely to synchronous
generator systems where the rotor speed is kept constant. Conse-
quently, the governor speed reference value (
) is made vari-
able in the present system.
In case the electric power produced by the IG is not enough
to match the consumed power, the PWM inverter dc capacitor
(
) is the only source from where the ac loads can take power.
Thus, the consumption of part of the energy stored in
would
produce a decrease in the dc-link voltage (
) up to the system
collapse. Similarly, an excess of generated power with relation
to the ac load power would be stored in
, causing the unlim-
ited increase of
. Therefore,
is a suitable parameter to
indicate the system power balance and it can be employed as the
control variable of the speed governor. Thus, the speed-governor
control operates to maintain
tracking a reference value, in
order to attain the system’s power balance.
Assuming the synchronous frequency at the induction gen-
erator stator is kept constant by the PWM inverter action, the
speed governor affects the
voltage amplitude as well as the
generator terminal voltage at the proposed system (Fig. 4).
As
acts as a voltage source to the PWM inverter, a good
voltage regulation is obtained at the IG leads by keeping
in-
variable, since the only difference between the voltages at the IG
and at the PWM inverter ac terminals is the voltage drop at the
series inductance (
). Provided
is assessed to filter voltage
components at the switching frequency and higher frequencies,
the voltage drop at 60 Hz is quite small. Hence, a good voltage
regulation and the system power balance are both achieved when
the speed governor maintains constant
.
Considering the PWM inverter allows bidirectional power
flow, the capability to compensate for reactive power is a natural
consequence of the system configuration and operation mode.
Therefore, when
is kept constant, the generator voltage is
regulated, even when feeding dominantly reactive loads. Nev-
ertheless, the PWM inverter should be properly rated to support
the reactive power load flow.
MARRA AND POMILIO: IG-BASED SYSTEM
911
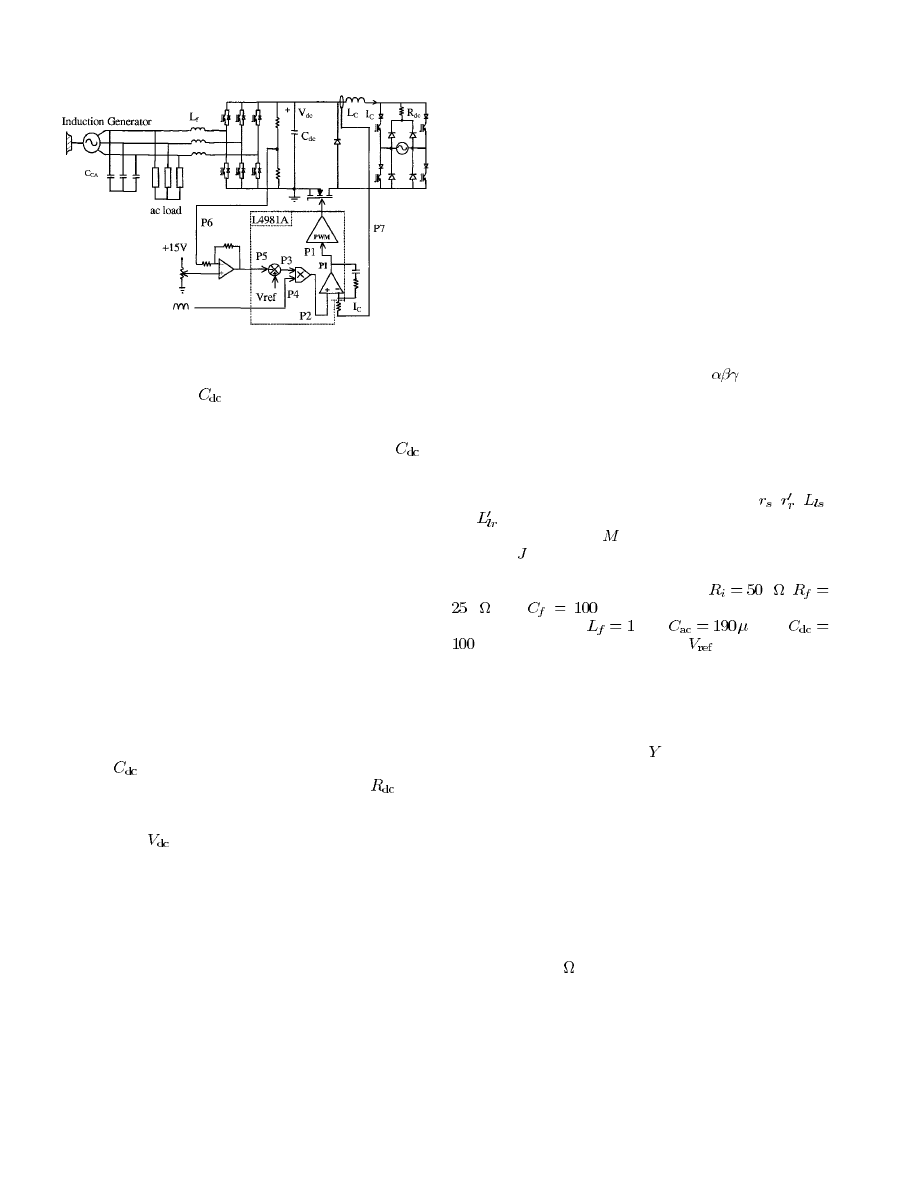
Fig. 5.
Variable-speed-based system configuration.
The energy stored in
is vital to improve the system’s ca-
pability to support extreme transient conditions, such as induc-
tion motor startups and high-power load steps. As a result, the
system’s transient behavior becomes more robust when
is
suitably rated.
Although Fig. 4 presents a proportional–integral (PI) gain for
the dc-voltage-loop error amplifier, other compensators can be
employed as an alternative to improve the system’s phase and
gain margins.
B. Ungoverned-Speed-Based System
Similarly to the controlled-speed-based system, the un-
governed-speed-based system also relies on a voltage-fed
PWM inverter to improve the induction generator electrical
characteristics, as presented in Fig. 5. This system does not
include a speed governor, hence, the generated power is
fully determined by the prime mover and the energy source
availability.
In this case, the system startup can be accomplished either
from the self-excitation produced by the rotor residual flux or
charging
, with energy obtained from the utility grid via a
single-phase diode rectifier in series with a resistor (
), con-
nected in parallel with the current inverter, as shown in Fig. 5.
Since there is no direct control upon the amount of the gener-
ated power, the
control is accomplished by means of sending
the excess of energy, which is not consumed by the ac load, to
the utility grid through the current inverter and a single-phase
line.
This sort of system is intended to be driven by nonregu-
lated-shaft-speed hydraulic turbines. Therefore, it is necessary
to guarantee the existence of a coordination between the IG and
the turbine torque characteristics, so that the shaft speed does
not cause a rotor slip frequency higher than the rated value, at
the point relative to the maximum generated power.
The PWM inverter dc side is asynchronously connected to the
single-phase utility grid through a current inverter (CI) (Fig. 5).
Thus, the system works as a cogenerator for the utility.
A buck dc–dc converter operates as a high-power-factor reg-
ulator, ensuring that the current sent to grid is properly phased
with the utility terminal voltage, and attains practically sinu-
soidal waveform.
This kind of system is suitable to be employed mainly in mi-
crohydroelectric plants whose rated power is lower than 50 kW,
such as rural sites where there are both enough hydraulic energy
source and a single-phase grid connection available. This at-
tributes are normally found in the north-central region of Brazil
and other Latin America rural areas.
The system rated power is limited by the availability of
low-cost turbines suitable to operate with nonregulated shaft.
Furthermore, the single-phase line has to be rated to receive all
the generated power if necessary.
IV. S
IMULATION
R
ESULTS
The controlled-speed-based system simulation was carried
out for a 50-hp induction generator, assisted by the PSpice pro-
gram, using a three-stationary-axes model (
model) to rep-
resent the induction machine. This system experiences a more
critical dynamic response than the ungoverned-speed-based
system, due to the closed-loop speed-control dynamics in-
volved. Thus, the controlled-speed-based system simulation is
a more suitable method to probe the system feasibility.
The 50-hp cage-rotor induction machine parameters referred
to the stator are presented in Table I [15], where
,
,
,
and
are the stator and rotor windings respective resistances
and leakage inductances,
is the air-gap magnetization induc-
tance, and
is the rotor inertia.
The system was simulated using proportional constant equal
to 0.5 and integral constant equal to 5 ms (
k ,
k , and
nF, in Fig. 4), the inverter switching
frequency was 5 kHz,
mH,
F, and
mF. The dc-link reference voltage (
) was set to 650 V.
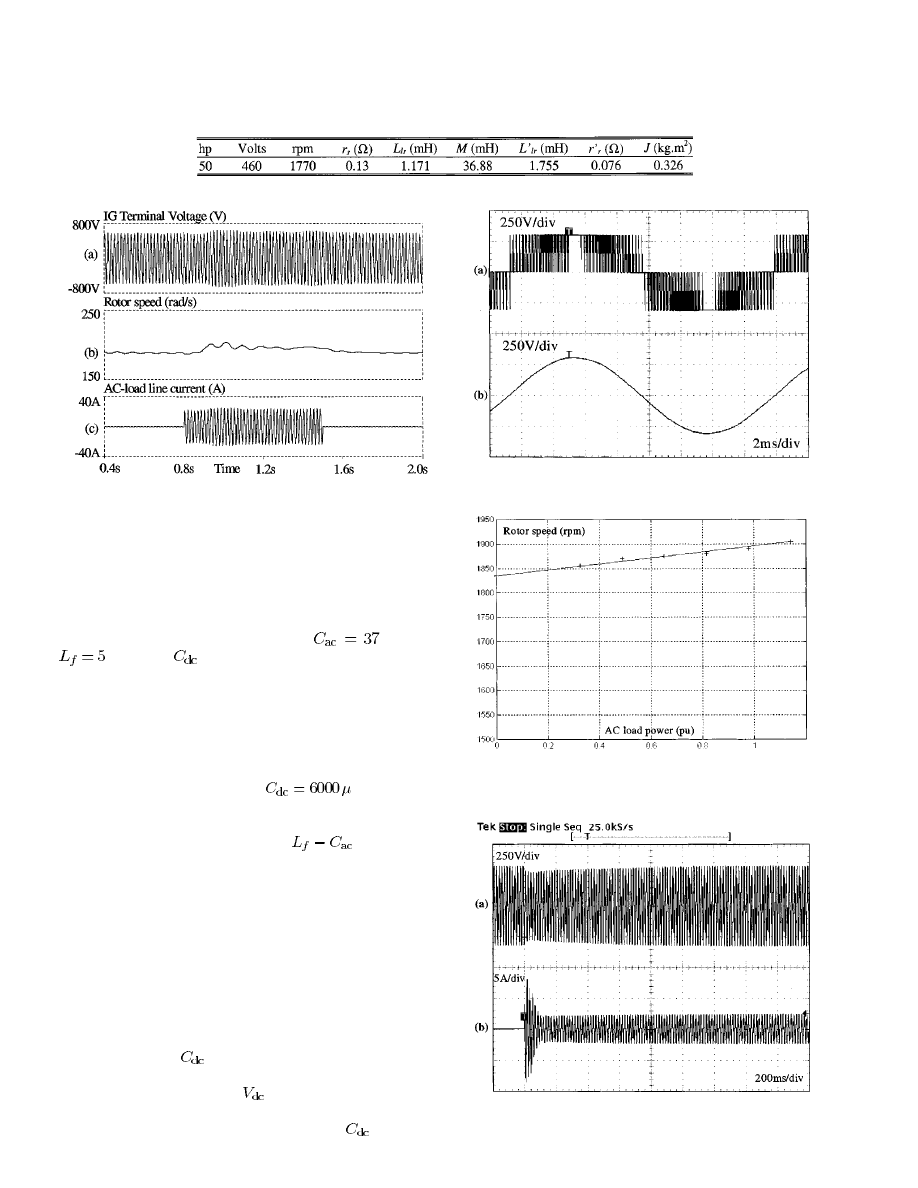
Fig. 6 presents the ac voltage at the IG terminals, the rotor
speed in radians per second, and the ac-load line current ob-
tained from simulation of an ac-load step transient connection.
After the startup process and an interval running under no
load, the system was submitted to an ac-load step at 800 ms.
The ac load was composed of a
-connected resistance bank,
rated at about 40% of the generator rated power. The ac load
was kept connected up to 1.5 s, when the system returned to the
previous no-load condition. It was verified that the system was
able to maintain the generator terminal voltage during a severe
load transient. The closed-loop speed control acted in order to
adjust the rotor speed so that the generator could suit the ac-load
power requirements.
As the prime mover is not able to produce negative torque to
brake the rotor, a dc-link resistance was employed to avoid over-
voltages during the occurrence of disconnections of ac loads
rated at significant power values, similarly to what is done in
motor drives. A 5-
resistance was then set to be switched on
when the DC voltage exceeds 670 V and, once connected, to
be switched off when the dc voltage returns to 650 V. Since the
purpose of the dc-link resistance is to avoid overvoltages under
transient episodes, this does not operate under normal circum-
stances, when the nondissipative speed control is intended to
maintain constant dc voltage.
It was observed that the system simulation demanded a
long computation time due to the concurrent high switching
frequency (5 kHz) and mechanical time constants involved.
912
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 47, NO. 4, AUGUST 2000
TABLE I
I
NDUCTION
M
ACHINE
P
ARAMETERS
Fig. 6.
(a) IG terminal line voltage. (b) Rotor speed. (c) AC-load line curren.
V. E
XPERIMENTAL
R
ESULTS
Both controlled-speed and ungoverned-speed IG-based
systems previously described were implemented, employing
a three-phase 1/2-hp induction machine with four poles, and
rated voltage of 220 V in delta connection. Moreover, the PWM
inverter switching frequency was 5 kHz,
uF , and
mH, while
is rated to produce satisfactory dynamic
behavior during both steady-state and transient conditions.
A. Controlled-Speed-Based System Results
The controlled-speed-based system was set up experimen-
tally, employing a dc motor as the system prime mover. The
dc motor was independently excited and driven by a controlled
rectifier. The system also attained
F at the PWM
inverter dc side.
Fig. 7 shows the IG and the PWM inverter terminal line volt-
ages in steady state. Observe that the
filter was ef-
fective in preventing the IG line voltage from the presence of
high-frequency components.
The variation of the IG rotor speed with the ac-load active
power is indicated in Fig. 8. Notice that the speed governor
raises the rotor speed, as the ac load power increases, causing
an augment in the rotor slip frequency, so that more power is
produced by the IG to suit the ac load demand.
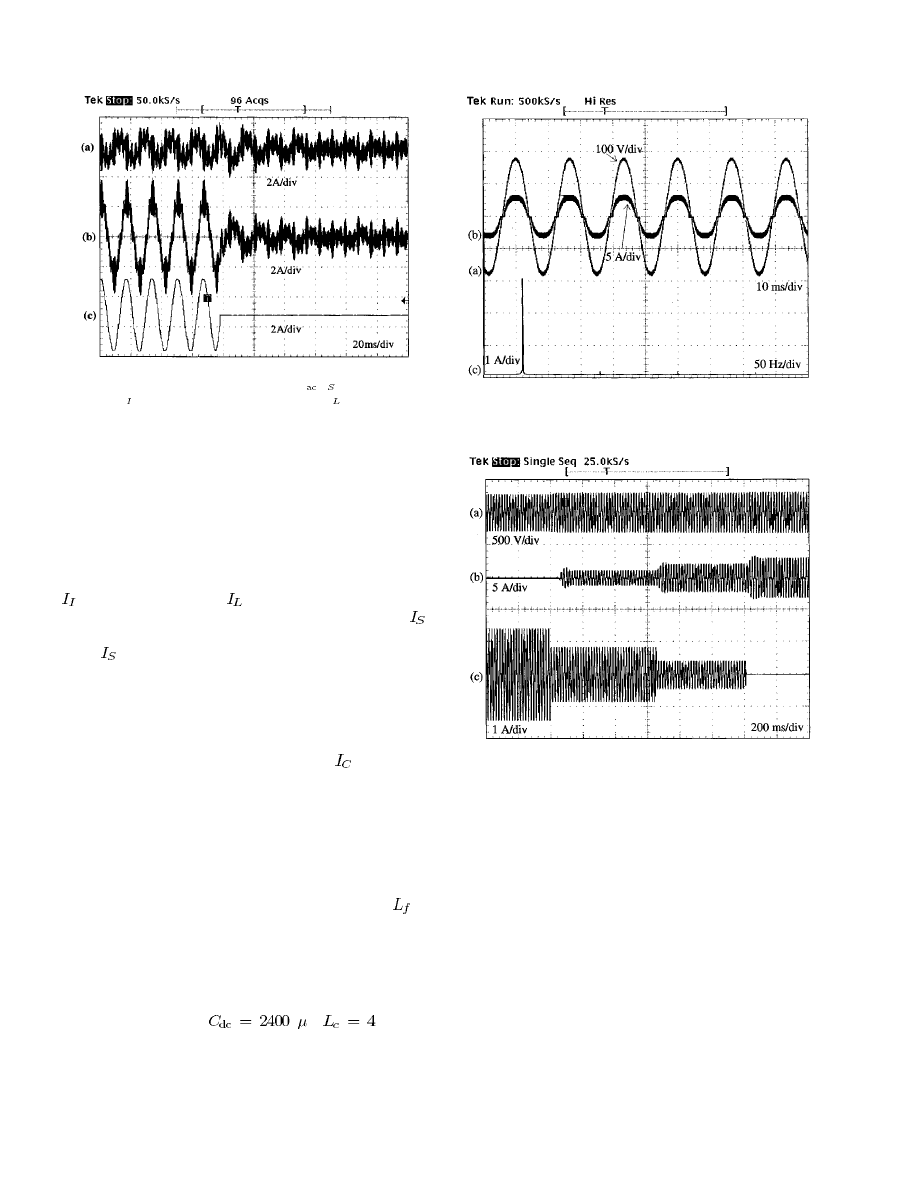
Fig. 9 indicates the startup of an eight-pole induction machine
whose rated values are 220 V (delta connection) and 70% of the
IG rated power. The induction motor was directly connected to
the IG leads at the startup. During the motor starting, part of
the energy stored in
is employed in the motor acceleration.
This causes a voltage sag which is subsequently eliminated due
to the speed controller action (
control).
The maximum voltage sag allowed at the ac loads should be
a decisive guideline to assess the rated value of
.
Fig. 7.
(a) PWM-inverter line voltage. (b) IG terminal line voltage.
Fig. 8.
Experimental relation between the IG rotor speed (r/min) and the
ac-load power {pu).
Fig. 9.
(a) IG terminal line voltage and (b) induction motor line current, during
the motor startup.
MARRA AND POMILIO: IG-BASED SYSTEM
913
Fig. 10.
Line current from the IG including (a)
C (I ), (b) PWM-inverter
line current (
I ), and (c) induction motor line current (I ), during the motor
disconnection.
The PWM inverter capability to compensate for the ac-load
reactive power requisites is evidenced by the record of the line
currents at the PWM inverter and at the induction motor, pre-
sented in Fig. 10. These currents were registered during the in-
duction motor disconnection. The motor was operating without
mechanical load at its shaft, leading to a strongly inductive line
current.
Fig. 10 presents the line currents at the PWM inverter output
(
), at the induction motor (
) , and the resulting current from
the association of the IG with the excitation capacitor bank (
),
whose adopted positive directions are those presented in Fig. 4.
The
current comprises the switching-frequency compo-
nent as well as the component relative to the active power con-
sumed by the load and the PWM converter (losses). After the
IM disconnection, the current component relative to the motor
losses is extinguished.
The IM magnetization current is provided by the PWM in-
verter. As a result, the converter line current (
) decays with
the disconnection of the motor (Fig. 10), which was the only ac
load fed by the system.
The system’s voltage regulation demonstrated to be satisfac-
tory, as the steady-state values of the IG terminal voltage varied
from 226 to 224 V, when the ac resistive load power varied from
no load to the rated power.
The IG voltage could be even made constant if an ac voltage
feedback was used to compensated the voltage drop in
, by
changing the modulation index of the PWM signal.
B. Ungoverned-Speed-Based System Results
The experimental setup of the variable-speed system was car-
ried out based on the system configuration presented in Fig. 5,
which was set up using
F,
mH, and
switching frequency of 25 kHz at the buck dc–dc converter.
The L4981 integrated circuit, normally employed to drive a
power-factor preregulator in ac–dc converter applications [16],
was used to control the buck converter. Hence, the current sent
to the utility grid through the current inverter is a sinusoidal
waveform and phased with the line voltage.
Fig. 11.
(a) Single-phase line terminal voltage. (b) Current sent to the utility.
(c) Frequency spectrum of the current sent to utility.
Fig. 12.
(a) IG terminal voltage. (b) Current sent to the utility. (c) Line current
at the ac load.
The experimental results obtained from the variable-speed
system implementation are similar to those obtained for the con-
trolled-speed system, regarding the voltage waveform, the capa-
bility to compensate for the ac load reactive power, and to sup-
port induction-motor startups, directly connected to the gener-
ator leads.
The single-phase line terminal voltage and the current sent
to the utility grid are presented in Fig. 11. Notice the current is
in phase with voltage and its waveform is approximately sinu-
soidal, as pointed out by the low harmonic content in the cur-
rent-frequency spectrum.
The record of a sequence of ac-load transients is presented
in Fig. 12. The ac load is composed of balanced three-phase
light-bulb sets, which are disconnected at three different in-
stants. As a result, the power provided by the IG varies from
120% of the generator rated power to no load.
Observe that each reduction at the ac-load power causes an
increase at the current sent to the utility through the current
914
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 47, NO. 4, AUGUST 2000
inverter (Fig. 12). No relevant influence was detected at the IG
terminal voltage during the transient occurrences.
The system presented satisfactory voltage regulation results
in steady-state operation, namely, 1.8% when feeding purely
resistive loads and 2.2% when feeding three-phase inductive
loads. In addition, no effect was detected at the terminal voltage
when both sorts of loads were made unbalanced.
VI. C
ONCLUSION
This paper has contributed toward proposing a constant-fre-
quency operation mode to isolated induction generator systems,
as an approach to improve their voltage regulation and main-
tain constant synchronous frequency. Moreover, the systems are
able to feed inductive ac loads, as well as to support direct-con-
nection startups of induction motors. The proposed strategy is
compatible with both controlled-speed or variable-speed opera-
tion modes.
The adopted methodology is nowadays feasible and cost ef-
fective at power levels mentioned before, due to the outstanding
evolution experienced by power semiconductor devices and
power converter technology.
The proposed strategy is intended to be applied in generation
systems whose primary energy source produces a narrow range
of variation at the generator shaft speed, such as low-head micro-
hydroelectric plants and fuel-engine-driven generation systems.
Two distinct system configurations were presented based
on the constant-synchronous-frequency operation mode. One
of the proposed configurations employs the speed governor,
in order to suit the IG power to the ac-load power requisites,
while the other proposed configuration does not use any speed
governor. The latter structure makes use of a single-phase
grid-connection to match the system’s generated power to the
ac-load power demand. In this case, the system operates as
cogenerator, sending the exceeding generated power to the
utility grid.
In both systems, the PWM inverter guarantees constant fre-
quency at the IG leads and provide the means to the proposed
systems compensate for the ac-load reactive power requisites.
Furthermore, the
capacitor at the PWM inverter is a fast-re-
covery energy storage device, which improves the robustness
of the IG system to support severe transients, such as induction
motor startups.
Both systems were also confirmed to be robust and stable
when submitted to sequential ac-load steps as well as during
the induction motor starting.
The PWM inverter dc voltage control (
control), exerted
by the speed governor, indicated that it was an effective, fast, and
reliable technique to obtain power balance, and to regulate the
amplitude of the IG terminal voltage, in controlled-speed-based
systems.
The variable-speed-based system operation as a cogenerator,
sending unity power factor sinusoidal current to the utility grid
through a single-phase line, demonstrated that it was an effective
control strategy for
. This approach allows the elimination
of the speed governor, leading to significant cost saving when
applied to microhydroelectric plants whose rated power is lower
than 50 kW.
R
EFERENCES
[1] D. E. Bassett and M. F. Potter, “Capacitive excitation for induction gen-
erators,” AIEE Trans., vol. 54, pp. 540–543, May 1935.
[2] C. F. Wagner, “Self-excitation of induction motors,” AIEE Trans., vol.
58, pp. 47–51, Feb. 1939.
[3] W. A. Moncrief, “Practical application and selection of single-phase to
three-phase converters,” in Proc. IEEE-IAS Rural Electric Power Conf.,
1996, pp. D3/1–D3/9.
[4] M. O. Durham and R. Ramakumar, “Power system balancers for an in-
duction generator,” IEEE Trans. Ind. Applicat., vol. 23, pp. 1067–1072,
Nov./Dec. 1987.
[5] L. Wang and S. Jina-Yi, “Effects of long-shunt and short-shunt connec-
tions on voltage variations of a self-excited induction generator,” IEEE
Trans. Energy Conversion, vol. 12, pp. 368–374, Dec. 1997.
[6] T. F. Chan, “Analysis of self-excited induction generators using an iter-
ative method,” IEEE Trans. Energy Conversion, vol. 10, pp. 502–507,
Sept. 1995.
[7]
, “Steady-state analysis of self-excited induction generators,” IEEE
Trans. Energy Conversion, vol. 9, pp. 288–296, June 1994.
[8] E. Bim, J. Szajner, and Y. Burian, “Voltage compensation of an induction
generator with long-shunt connection,” IEEE Trans. Energy Conversion,
vol. 4, pp. 526–530, Sept. 1989.
[9] T. F. Chan, “Capacitance requirements of self-excited induction genera-
tors,” IEEE Trans. Energy Conversion, vol. 8, pp. 304–311, June 1993.
[10] N. H. Malik and A. A. Mazi, “Capacitive requirements for isolated
self-excited induction generators,” IEEE Trans. Energy Conversion,
vol. EC-2, pp. 62–69, Mar. 1987.
[11] N. H. Malik and S. E. Haque, “Steady state analysis and performance of
an isolated self-excited induction generator,” IEEE Trans. Energy Con-
version, vol. EC-1, pp. 134–140, Sept. 1986.
[12] M. B. Brennen and A. Abbondanti, “Static exciters for induction genera-
tors,” IEEE Trans. Ind. Applicat., vol. 13, pp. 422–428, Sept./Oct. 1977.
[13] S. M. Alghuwainem, “Steady-state analysis of a self-excited induction
generator self-regulated by a shunt saturable reactor,” in Conf. Rec. IEEE
IEMDC’97, Milwaukee, WI, May 1997, pp. MB1-10.1–MB1-10.3.
[14] B. C. Doxey, “Theory and applications of capacitors excited induction
generators,” Engineer, vol. 216, pp. 893–897, Nov. 1963.
[15] S. B. Dewan, G. R. Slemon, and A. Straughen, Power Semiconductor
Drives.
New York: Wiley, 1984.
[16] C. A. Ayres and I. Barbi, “A family of converters for UPS produc-
tion burn-in energy recovery,” IEEE Trans Power Electron., vol. 12, pp.
615–622, July 1997.
Enes Gonçalves Marra (S’95–A’99) was born
in Brazil in 1966. He received the B.S. and M.S.
degrees in electrical engineering from the Federal
University of Uberlândia, Uberlândia, Brazil, and
the Doctoral degree in electrical engineering from
the State University of Campinas, Campinas, Brazil,
in 1989, 1993, and 1999, respectively.
Since 1993, he has been a Lecturer in the School of
Electrical Engineering, Federal University of Goiás,
Goiânia, Brazil. His research interests include elec-
trical drives, power electronics applications, and re-
newable energy sources.
José Antenor Pomilio (M’93) received the Bach-
elor‘s, Master‘s, and Doctoral degrees in electrical
engineering from the State University of Campinas,
Campinas, Brazil, in 1983, 1986, and 1991, respec-
tively.
From 1988 to 1991, he was Head of the Power
Electronics Group at the Brazilian Synchrotron
Laboratory. Since 1991, he has been an Assistant
Professor in the School of Electrical and Computer
Engineering, State University of Campinas. In
1993–1994, he held a postdoctoral position in the
Electrical Engineering Department, University of Padova, Padova, Italy. His
main interests are switching-mode power supplies and electrical drives. He is
Vice-President of the Brazilian Power Electronics Society.
Dr. Pomilio is currently the IEEE Power Electronics Society Liaison to Re-
gion 9.
Wyszukiwarka
Podobne podstrony:
Modeling Of The Wind Turbine With A Doubly Fed Induction Generator For Grid Integration Studies
SBMDS an interpretable string based malware detection system using SVM ensemble with bagging
A Cage Induction Generator Using Back To Back Pwm Converter For Variable Speed Grid Connected Wind E
Systemy pomiarowo-regulacyjne, STUDIA PŁ, TECHNOLOGIA ŻYWNOŚCI I ŻYWIENIA CZŁOWIEKA, ROK II, SEM 3,
Labolatorium komputerowych systemów automatyki, Regulatory mikroprocesorowe, Politechnika Lubelska
POZNAN 2, DYNAMICS OF SYSTEM OF TWO BEAMS WITH THE VISCO - ELASTIC INTERLAYER BY THE DIFFERENT BOUN
systemy partyjne regulacja partii politycznych
general cooling system servicing
Childhood Maltreatment and Difficulties in Emotion Regulation Associations with Sexual and Relation
Community based policing provides hope for law enforcement
Miller Recent Developments In Slab A Software Based System For Interactive Spatial Sound Synthesis
Intraday Pivot Based System
Vector Controlled Doubly Fed Induction Generator for Wind Applications
1948 Infinite dimensional differential metrics with constant curvature Michal
LoudSpeaker Voice Coil Inductance Losses Circuit Models, Parameter Estimation And Effects On Freque
więcej podobnych podstron