
Metoda kierunkowa w
triangulacji
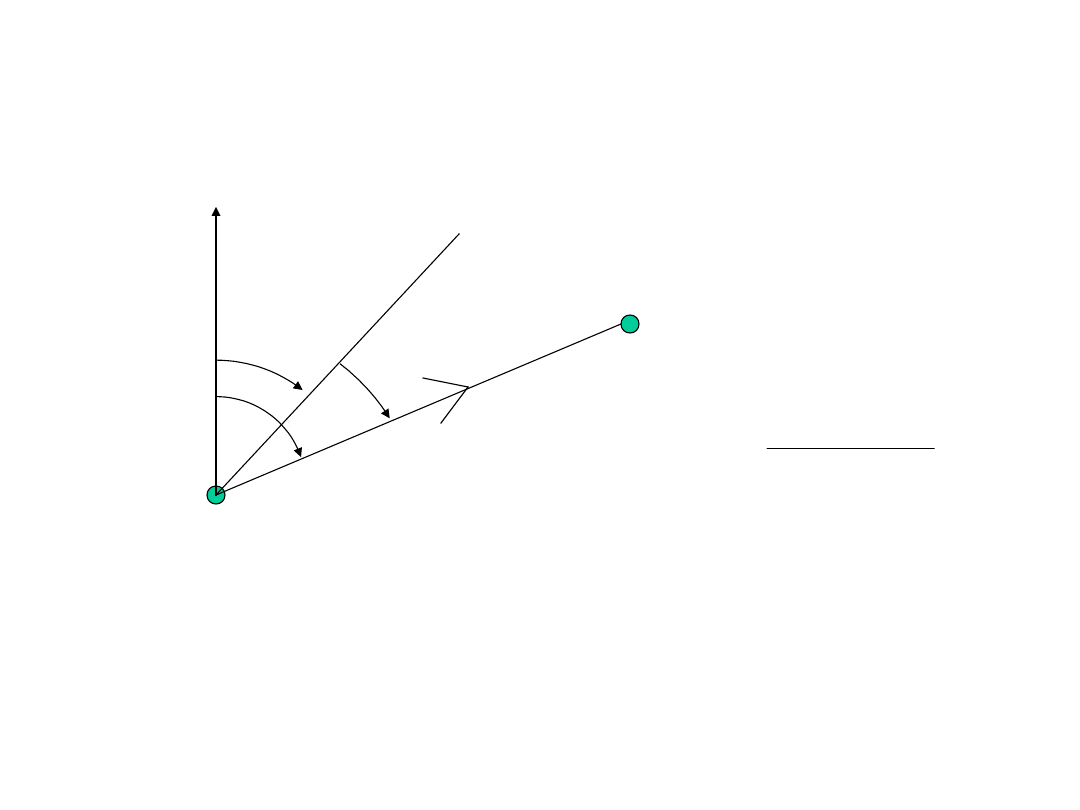
Równanie obserwacyjne kierunku
A
B
A
B
AB
X
X
Y
Y
arctg
A
B
AB
x
0
z
K
r
AB
z
v
Kr
z – niewiadoma
orientacyjna
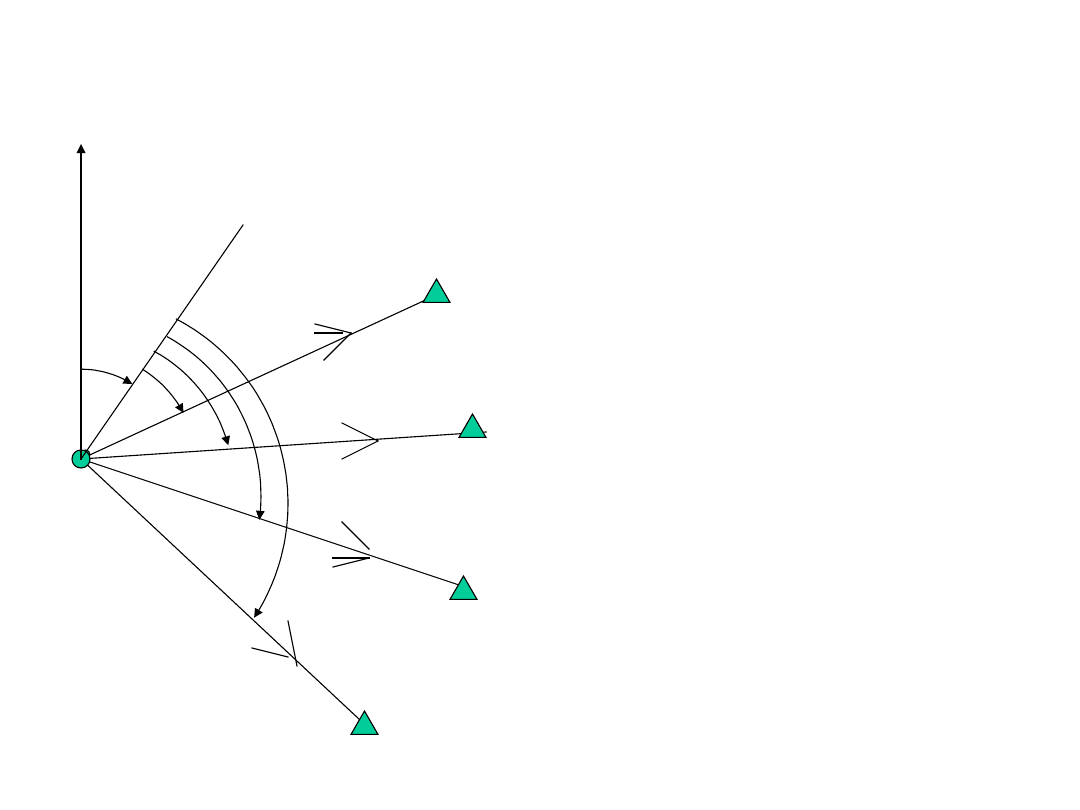
Kierunki wcinające wstecz
x
P
0
z
A
B
C
D
Kr
1
Kr2
Kr3
Kr4
PD
P
PC
P
PB
P
PA
P
z
v
Kr
z
v
Kr
z
v
Kr
z
v
Kr
4
4
3
3
2
2
1
1
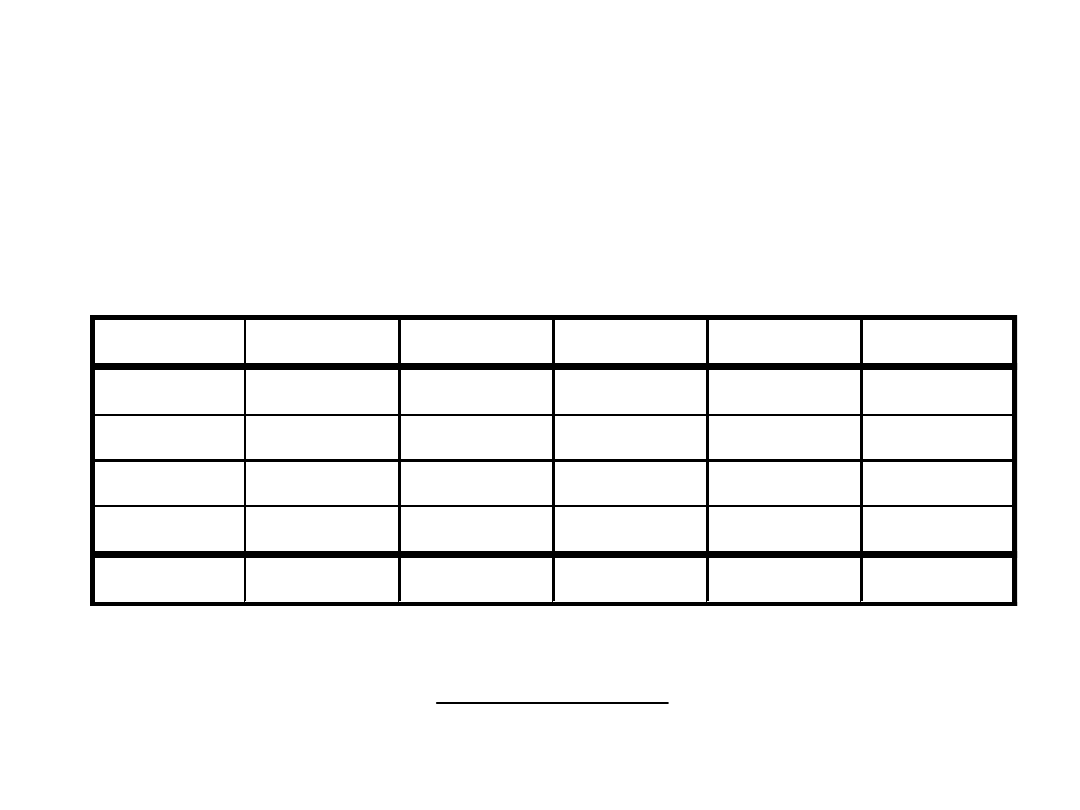
Orientacja stanowiska
i
i
i
i
P
i
i
Kr
z
z
v
Kr
4
4
3
2
1
0
z
z
z
z
z
Nr
Kr
z= -Kr Kr
0
=Kr+z
0
l= -Kr
0
1
Kr
z
Kr
+z
0
l
2
Kr
z
Kr
+z
0
l
3
Kr
z
Kr
+z
0
l
4
Kr
z
Kr
+z
0
l
z
0
0

Równania błędów dla kierunków
wcinających wstecz
i
i
i
z
v
Kr
P
i
P
i
i
i
i
y
b
x
a
z
z
v
Kr
0
0
)
(
0
0
z
Kr
y
b
x
a
z
v
i
i
P
i
P
i
i
i
P
i
P
i
i
l
y
b
x
a
z
v
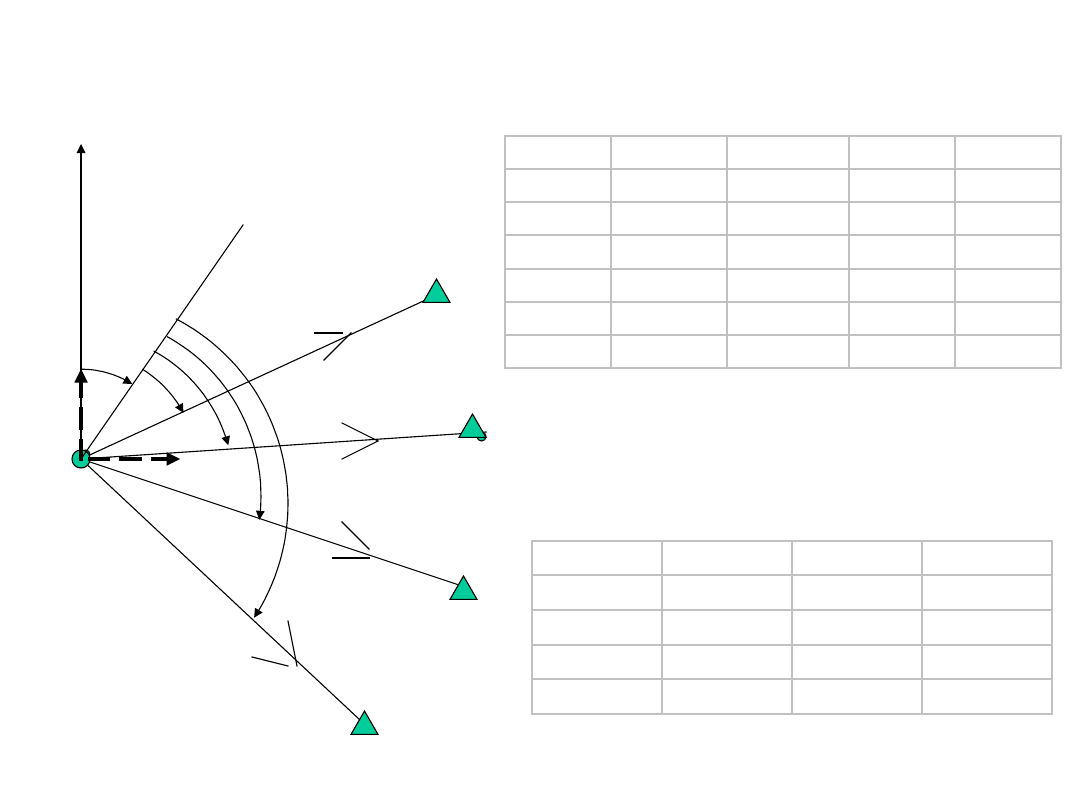
Przykład:
x
P
0
z
A
B
C
D
Kr
1
Kr2
Kr3
Kr4
a
b
1
70,4833
848,83
-424,41
2
96,0263
792,68
-49,54
3 134,4042
936,21
561,72
4 162,5666
489,71
734,56
X
Y
Kr
A
1300,00
1600,00
1
0,0000
B
1050,00
1800,00
2 25,5435
C
700,00
1500,00
3 63,9212
D
400,00
1400,00
4 92,0837
P
1000,00
1000,00
Orientacja stanowiska
Nr
Kr
z=-Kr Kr
0
=Kr+z
0
l=-Kr
0
1
0
0,0000
2
0
5,55
3
0
,
4
5
,0
70,4833
70,482
8
70,483
0
70,482
970,4830
70,483
0
96,0265
134,40
42
162,5667
3
-2
0
-1
0

Równania błędów:
i
P
i
P
i
i
l
y
b
x
a
z
v
3
41
,
424
83
,
848
1
1
P
P
y
x
z
v
2
54
,
49
68
,
792
1
2
P
P
y
x
z
v
0
72
,
561
21
,
936
1
3
P
P
y
x
z
v
1
56
,
734
71
,
489
1
4
P
P
y
x
z
v
Document Outline
Wyszukiwarka
Podobne podstrony:
met kierunkowa
4 MOO lab met prostych kierunk Nieznany (2)
MOO lab met sprzezonych kierunkow
KIERUNKI ŚWIATA
KIERUNKI FILOZOFICZNE
4 G é wne kierunki pyta ä filozoficznych
ST14 20010 Met ppt
192 Glowne kierunki polskiej polityki zagranicznejid 18465 ppt
Kierunki i rodzaje gimnastyki
met PCD
Przebieg potencjału czynnościowego i kierunki prądów jonowyc
wykład2 kierunki WME,WEL,WCY
Kierunki i szko y w nauce organizacji i zarz dzania I wyklad 2007
KM W 25 lekkie konst met stud
5 tekst kierunki
Opara S, Filozofia Współczesne kierunki i problemy, s 98 111
pomiary kierunków pionowych4
Met sta korekta ocen do e learningu
więcej podobnych podstron