
Metody optymalizacji 1

Plan wykładu
• Metody poszukiwania minimum bez
ograniczeń
• Programowanie liniowe
• Metoda Simplex
• Dualność programowania liniowego
• Problemy całkowitoliczbowe
• Metoda podziału i oszacowań
• Metoda podziału i odcięć

Sformułowanie problemu
poszukiwania minimum bez
ograniczeń
Zadanie minimalizacji funkcji bez ograniczeń
można zapisać następująco
gdzie f : R
n
R , przy czym zakłada się, że
funkcja f jest ograniczona od dołu.
)
(
min
)
ˆ
(
x
x
f
f
n
R
x
Warunki optymalności dla
zadań bez ograniczeń (1)
Definicja. Kierunkiem d w przestrzeni R
n
będziemy
nazywać dowolny n-wymiarowy wektor
kolumnowy. Niech będzie dany punkt x R
n
oraz
skalar
[0;+). Dowolny punkt y R
n
leżący na
półprostej wychodzącej z punktu x w kierunku d
0 będzie w wówczas określony zależnością
y = x +
d
Warunki optymalności dla
zadań bez ograniczeń (2)
Lemat. Niech f : X = R
n
R
1
będzie funkcją
różniczkowalną w punkcie x
0
X . Załóżmy, że
istnieje d, dla którego
f(x
0
)
T
d < 0
wówczas istnieje takie
> 0, że dla wszystkich
(0;
] zachodzi
f(x
0
+
d) < f(x
0
)
Dowód. Lemat wynika wprost z własności różniczki
Gateaux
d
x
x
d
x
T
f
f
f
)
(
)
(
)
(
lim
0
0
0
0
Warunki optymalności dla
zadań bez ograniczeń (3)
Twierdzenie. Niech f : X = R
n
R
1
będzie funkcją
różniczkowalną. Jeżeli x
X minimalizuje funkcję
w tzn.
f(x
) f(x), x X
to
f(x
) = 0
Powyższy warunek jest tylko warunkiem
koniecznym. Jeżeli więc f(x
) = 0, to x
może być
minimum lub maksimum globalnym lub lokalnym,
albo punktem przegięcia lub punktem siodłowym.
Warunki optymalności dla
zadań bez ograniczeń (4)
Twierdzenie. Niech f : X = R
n
R
1
będzie funkcją
wypukłą i różniczkowalną. Punkt x
X stanowi
minimum globalne funkcji f wtedy i tylko wtedy,
gdy x
spełnia warunek
f(x
) = 0
Twierdzenie. Jeśli f : X = R
n
R
1
będzie funkcją
ściśle wypukłą i różniczkowalną, to punkt x
X
spełniający warunek konieczny f(x
) = 0 jest
jednym minimum globalnym funkcji f.

Metody poszukiwania minimum
funkcji bez ograniczeń
• Metody przypadkowe
Algorytmy genetyczne
Symulowane wyżarzanie
• Metody zdeterminowane (sposób tworzenia
kierunków poszukiwań)
Metody o modyfikowanej bazie (bezgradientowe)
Metody o modyfikowanym kierunku (gradientowe)
• Metody zdeterminowane (sposób
znajdowania kolejnego punktu wzdłuż
kierunku poszukiwań)
Metody dyskretne
Metody z minimalizacją
{kind=link}
Metoda złotego podziału (1)
• Metoda bezgradientowa
• Stosuje złotą liczbę
• Złota liczba została odkryta przez
starożytnych Greków, i dotyczy podziału
odcinka o długości
(a + b) na takie części, że (a + b) / a = a / b
• Metoda złotego podziału stosuje liczbę (
1)
• Stosowana w architekturze, sztuce
2
1
5
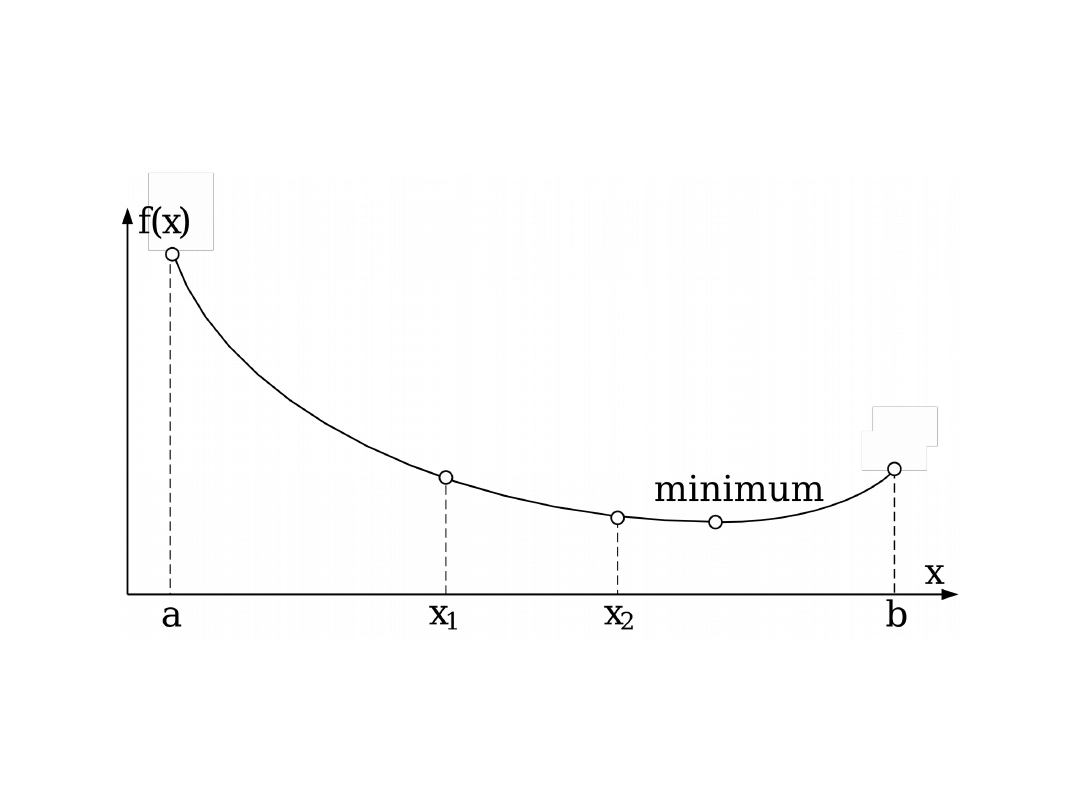
Metoda złotego podziału (2)
Minimum jest szukane dla funkcji f(x), x [
0
;
m
]
Inicjalizacja algorytmu
= (
1) ,
= (1
)(
m
0
) , a
1
=
0
, b
1
=
m
,
x
11
= a
1
+
, x
21
= b
1
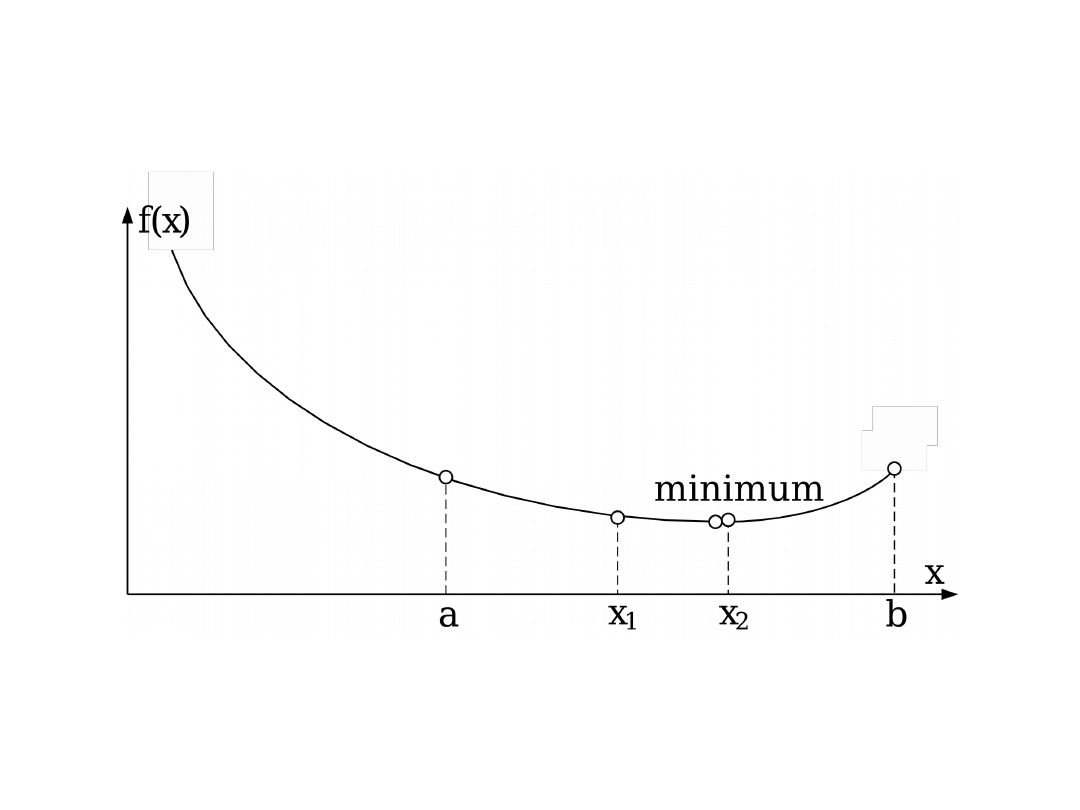
Algorytm obliczeń
Jeżeli f(x
2k
) > f(x
1k
), to
a
k+1
= a
k
, b
k+1
= x
2k
, x
1k+1
=
a
k+1
+ (1
)b
k+1
, x
2k+1
= x
1k
Jeżeli f(x
2k
) f(x
1k
), to
a
k+1
= x
1k
, b
k+1
= b
k
, x
1k+1
= x
2k
, x
2k+1
=
b
k+1
+ (1
)a
k+1
Warunek stopu
Wymagana dokładność, liczba iteracji
Metoda złotego podziału (3)
Metoda złotego podziału (3)
Metoda złotego podziału (4)
Przykład. Znaleźć minimum dla f(x) = x
2
– 6x – 4, x [0;10]
k
a
b
x
1
x
2
f(x
1
)
f(x
2
)
1
0
10
3,82
6,18
-12,3
-2,8
2
0
6,18
2,36
3,82
-12,6
-12,3
3
0
3,82
1,46
2,36
-10,6
-12,6
4
1,46
3,82
2,36
2,92
-12,6
-
12,99
5
2,36
3,82
2,92
3,26
-
12,99
-
12,93
6
2,36
3,26
2,70
2,92
-
12,91
-
12,99
Jakie jest rozwiązanie tego problemu?

Programowanie liniowe
• Programowanie liniowe LP (ang. Linear
Programming) to klasa problemów programowania
matematycznego, w której wszystkie warunki
ograniczające oraz funkcja celu mają postać liniową
• Wiele problemów optymalizacji szczególnie w
ekonomii może być zapisana jako zadanie
programowania liniowego
• Najbardziej popularna metoda rozwiązania zadań
programowania liniowego to Simplex
• Twórca metody Simplex – George Dantzig –
otrzymał w 1975 roku nagrodę Nobla w dziedzinie
ekonomii

Warianty zapisu zadania
programowania liniowego (1)
indeksy
j = 1,2,…,n zmienne
i = 1,2,…,m ograniczenia
stałe
a
ij
współczynnik zmiennej j w ograniczeniu i
b
i
prawa strona ograniczenia i
c
j
współczynnik kosztu zmiennej j
zmienne
x
j
zmienna j
funkcja kryterialna
min z =
j
c
j
x
j
ograniczenia
j
a
ij
x
j
= b
i
dla i = 1,2,…,m
x
j
0 dla j = 1,2,…,n

Warianty zapisu zadania
programowania liniowego (2)
x = [x
1
, x
2
,…, x
n
] – kolumna o rozmiarze n
b = [b
1
, b
2
,…, b
m
] – kolumna o rozmiarze m
c = [c
1
, c
2
,…, c
n
] – wiersz o rozmiarze n
macierz o rozmiarze m x n
min cx
przy ograniczeniach (p.o.)
Ax = b
x 0
mn
m
n
n
a
a
a
a
a
a
...
...
...
...
...
...
1
2
21
1
11
A

Postać standardowa zadania
programowania liniowego (1)
zmienne
x
j
zmienna j
funkcja kryterialna
min z =
j
c
j
x
j
ograniczenia
j
a
ij
x
j
= b
i
dla i = 1,2,…,m
x
j
0 dla j = 1,2,…,n

Postać standardowa zadania
programowania liniowego (2)
Pełne ograniczenia nierównościowe typu
j
a
ij
x
j
b
i
dla i = 1,2,…,m
można sprowadzić do postaci równościowej przez
dodanie zmiennej dopełniającej (ang. slack) z o
wartościach nieujemnych
j
a
ij
x
j
+ z
j
= b
i
, z
i
0 dla i = 1,2,…,m
Pełne ograniczenia nierównościowe typu
j
a
ij
x
j
b
i
dla i = 1,2,…,m
przekształcamy przez odjęcie zmiennej
dopełniającej o wartościach nieujemnych
j
a
ij
x
j
–
z
j
= b
i
, z
i
0 dla i = 1,2,…,m

Postać standardowa zadania
programowania liniowego (3)
Pełne dwustronne ograniczenia nierównościowe
l
i
j
a
ij
x
j
u
i
dla i = 1,2,…,m
j
a
ij
x
j
u
i
dla i = 1,2,…,m
j
a
ij
x
j
l
i
dla i = 1,2,…,m
Mogą być sprowadzone do postaci równościowej
dodając zmienne dopełniające do ograniczeń
j
a
ij
x
j
u
i
dla i = 1,2,…,m
j
a
ij
x
j
l
i
dla i = 1,2,…,m
w przedstawiony powyżej sposób

Postać standardowa zadania
programowania liniowego (4)
Dwustronne ograniczenia zakresu zmiennych
l
j
x
j
u
j
dla j = 1,2,…,n
można zastąpić nierównościami
x
j
l
j
dla j = 1,2,…,n
x
j
u
j
dla j = 1,2,…,n
Zmienne nieograniczone można zastąpić
wprowadzając różnicę dwóch nieujemnych zmiennych
x
j
= z
1
– z
2
z
1
0
z
2
0
Własności zadania
programowania liniowego
Twierdzenie. Zbiór wszystkich rozwiązań
dopuszczalnych zadania programowania liniowego
jest zbiorem wypukłym
Twierdzenie. Funkcja celu zadania programowania
liniowego przyjmuje wartość minimalną w
punkcie wierzchołkowym zbioru wypukłego
utworzonego na zbiorze rozwiązań dopuszczalnego
zadania programowania liniowego. Jeżeli przyjmuje
wartość w więcej niż jednym punkcie
wierzchołkowym, to tę samą wartość przyjmuje dla
każdej kombinacji wypukłej tych punktów
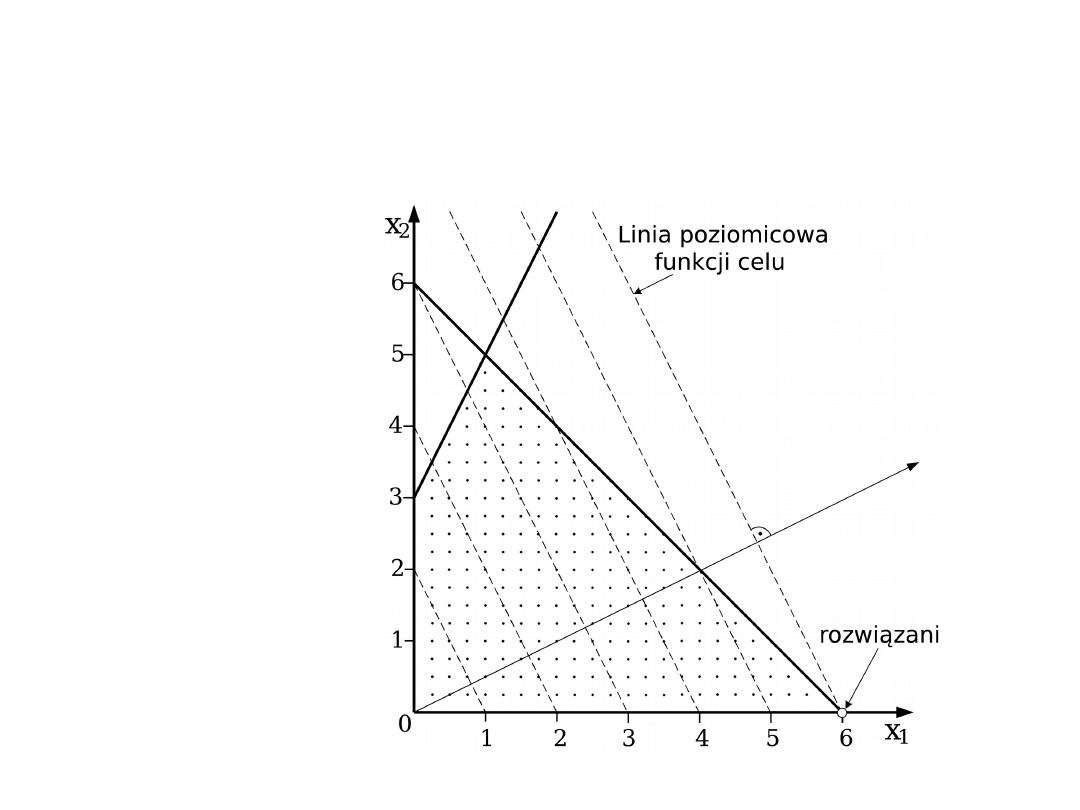
Interpretacja geometryczna
programowania liniowego (1)
max 2x
1
+ x
2
p.o.
x
1
+ x
2
6
-2x
1
+ x
2
3
x
1
0
x
2
0
rozwiązanie
x
1
= 6
x
2
= 0
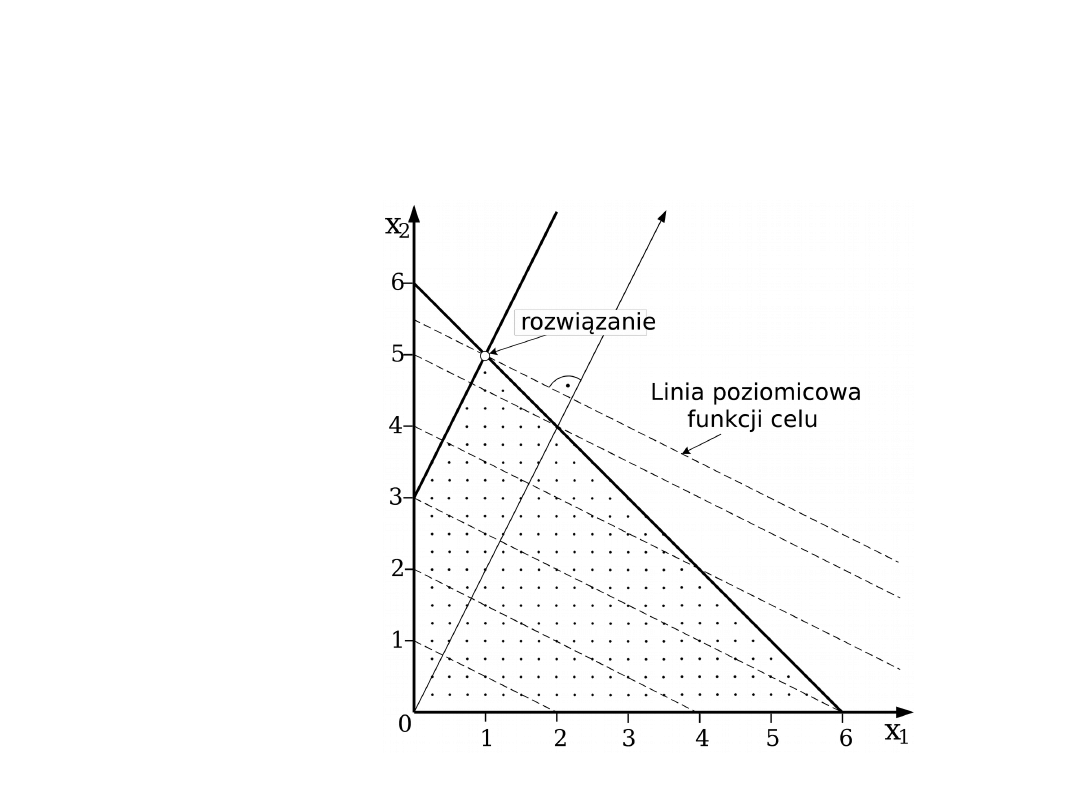
Interpretacja geometryczna
programowania liniowego (2)
max x
1
+ 2x
2
p.o.
x
1
+ x
2
6
-2x
1
+ x
2
3
x
1
0
x
2
0
rozwiązanie
x
1
= 1
x
2
= 5

Metoda Simplex
• Opracowana w 1947 roku przez Georga Dantziga
• Istota metody simpleks polega na przeglądaniu
wierzchołków wielościanu przestrzeni rozwiązań
• Wyznaczany jest jeden z wierzchołków
• Kolejne kroki algorytmu polegają na przejściu do
następnego wierzchołka, znajdującego się na
jednej krawędzi z odnalezionym już punktem, w
którym funkcja celu osiąga lepsze wartości
• Algorytm kończy się, gdy kolejny przeglądany punkt
wierzchołkowy jest najlepszy pod względem
odpowiednich wartości funkcji celu

Dualność
programowania liniowego (1)
• Wiele metod rozwiązywania zadań
programowania liniowego wykorzystuje
zadania dualne
• Z zadaniem podstawowym, zwanym zadaniem
pierwotnym lub prymalnym jest związane
zadanie dualne
• Między zadaniem podstawowym i dualnym są
ścisłe związki umożliwiające konstrukcję
algorytmów rozwiązywania zadań
programowania liniowego, jak również
zmniejszenie nakładu obliczeń
Dualność
programowania liniowego (2)
Zadanie prymalne
zmienne
x
j
zmienna j
funkcja kryterialna
min
j
c
j
x
j
ograniczenia
j
a
ij
x
j
b
i
dla i = 1,2,
…,m
x
j
0 dla j = 1,2,…,n
Zadanie dualne
zmienne
i
dualna zmienna i
funkcja kryterialna
max
i
b
i
i
ograniczenia
i
a
ij
i
c
j
dla j = 1,2,
…,n
i
0 dla i = 1,2,…,m
Dualność
programowania liniowego (3)
Zadanie prymalne
min cx
p.o. Ax b
x 0
Zadanie dualne
max b
p.o. A c
0
Dualność
programowania liniowego (4)
Twierdzenie. Zadaniem dualnym do zadania
dualnego jest zadanie prymalne
Twierdzenie. Jeżeli x jest rozwiązaniem
dopuszczalnym dla zadaniem prymalnego i jest
rozwiązaniem dopuszczalnym dla zadania
dualnego, to wartość funkcji celu w zadaniu
prymalnym nie może być mniejsza od wartości
funkcji celu w zadaniu dualnym
cx b
Dualność
programowania liniowego (5)
Twierdzenie (silna dualność). Jeżeli dla pary rozwiązań
dopuszczalnych (x
0
,
0
) zachodzi równość cx
0
= b
0
to (x
0
,
0
) jest parą rozwiązań optymalnych
Twierdzenie. Jeśli jedno z pary wzajemnie dualnych
zadań programowania liniowego ma rozwiązanie
optymalne, to ma je również zadanie dualne i
obydwa zadania mają identyczne wartości funkcji
celu
Twierdzenie. Jeśli zadanie dualne jest nieograniczone,
to zadania prymalne jest sprzeczne

Problemy całkowitoliczbowe
(1)
• Problem, w którym część zmiennych jest ciągła a
część całkowitych określany jest skrótem MIP (ang.
Mixed Integer Programming)
• Problem, w którym wszystkie zmienne są całkowite
określany jest skrótem IP (ang. Integer Programming)
• Problemy całkowitoliczbowe należą do klasy
problemów NP-trudnych
• Specjalną klasą problemów całkowitoliczbowych są
problemy, w których zmienne całkowite mogą
przyjmować wartości 0 lub 1
• Podstawowy sposób rozwiązywania problemów
całkowitoliczbowych to metoda podziału i
oszacowań

Problem MIP
indeksy
j = 1,2,…,n zmienne
i = 1,2,…,m ograniczenia
stałe
a
ij
współczynnik zmiennej j w ograniczeniu i
b
i
prawa strona ograniczenia i
c
i
współczynnik kosztu zmiennej j
zmienne
x
j
zmienna j
funkcja kryterialna
min z =
j
c
j
x
j
ograniczenia
j
a
ij
x
j
= b
i
dla i = 1,2,…,m
x
j
{0,1} dla j = 1,2,…,k , x
j
0 dla j = k + 1, k + 2,…,n

Problem IP
indeksy
j = 1,2,…,n zmienne
i = 1,2,…,m ograniczenia
stałe
a
ij
współczynnik zmiennej j w ograniczeniu i
b
i
prawa strona ograniczenia i
c
i
współczynnik kosztu zmiennej j
zmienne
x
j
zmienna j
funkcja kryterialna
min z =
j
c
j
x
j
ograniczenia
j
a
ij
x
j
= b
i
dla i = 1,2,…,m
x
j
{0,1} dla j = 1,2,…,n

Relaksacja problemu MIP
Niech N
0
oraz N
1
oznaczają zbiór oznaczają zbiory
indeksów zmiennych o wartościach 0 oraz 1. Zbiór
N
U
zawiera indeksy zmiennych binarnych o
nieustalonych wartościach
Problem MIP można przekształcić w problem, w
którym są następujące ograniczenia
x
j
0 dla j = k + 1, k + 2,…,n
0 x
j
1 , x
j
ciągłe dla j N
U
x
j
= 0 dla j N
0
x
j
= 1 dla j N
1
Rozwiązanie powyższego problemu, jeżeli istnieje,
stanowi dolne oszacowanie rozważanego problemu

Metoda podziału i oszacowań
(1)
• Metoda podziału i oszacowań (ang. branch-and-bound)
polega na przeszukiwaniu przestrzeni rozwiązań i
eliminowaniu podzbiorów przestrzeni rozwiązań, które
nie dają szans na uzyskanie lepszego rozwiązania
• Najważniejsze elementy metody podziału i oszacowań to
oszacowanie (ang. bounding) i podział (ang.
branching)
• Procedura dolnego oszacowania umożliwia
zweryfikowanie bieżącego rozwiązania, zazwyczaj
dolne oszacowanie uzyskuje się rozwiązując
uproszczoną wersję problemu
• Metody podziału służą do wyboru zmiennych do
podstawienie
• Rozwiązanie uzyskane za pomocą metody podziału i
oszacowań można przedstawić w formie drzewa

Metoda podziału i oszacowań
(2)
procedure BBB (N
U
,N
0
,N
1
)
begin
solution (N
U
,N
0
,N
1
, x, z) {solving the relaxed linear poblem};
if N
U
= ∅ or for all i N
U
x
i
are binary then
if z < z
best
then begin z
best
:= z; x
best
:= x end
else {in the current solution the value of x
i
is not binary for
some i N
U
}
if z ≥ z
best
then
return {bounding}
else
begin {branching}
choose i N
U
such that x
i
is fractional;
BBB (N
U
\{i},N
0
{i},N
1
);
BBB (N
U
\{i},N0,N
1
{i})
end
end { procedure }

Metoda podziału i odcięć
• Metoda podziału i odcięć (ang. branch-and-cut)
to ulepszona wersja metody podziału i oszacowań
• Skuteczność metody podziały i oszacowań
zależy od efektywności oszacowań
• Wprowadzając w każdym węźle drzewa rozwiązań
dodatkowych ograniczeń (valid
inequalities), można ograniczyć przestrzeń
rozwiązań i uzyskać dokładniejsze oszacowanie
• Metoda podziału i odcięć to metoda podziału i
oszacowań z dodatkowymi ograniczeniami
używanymi w węzłach drzew
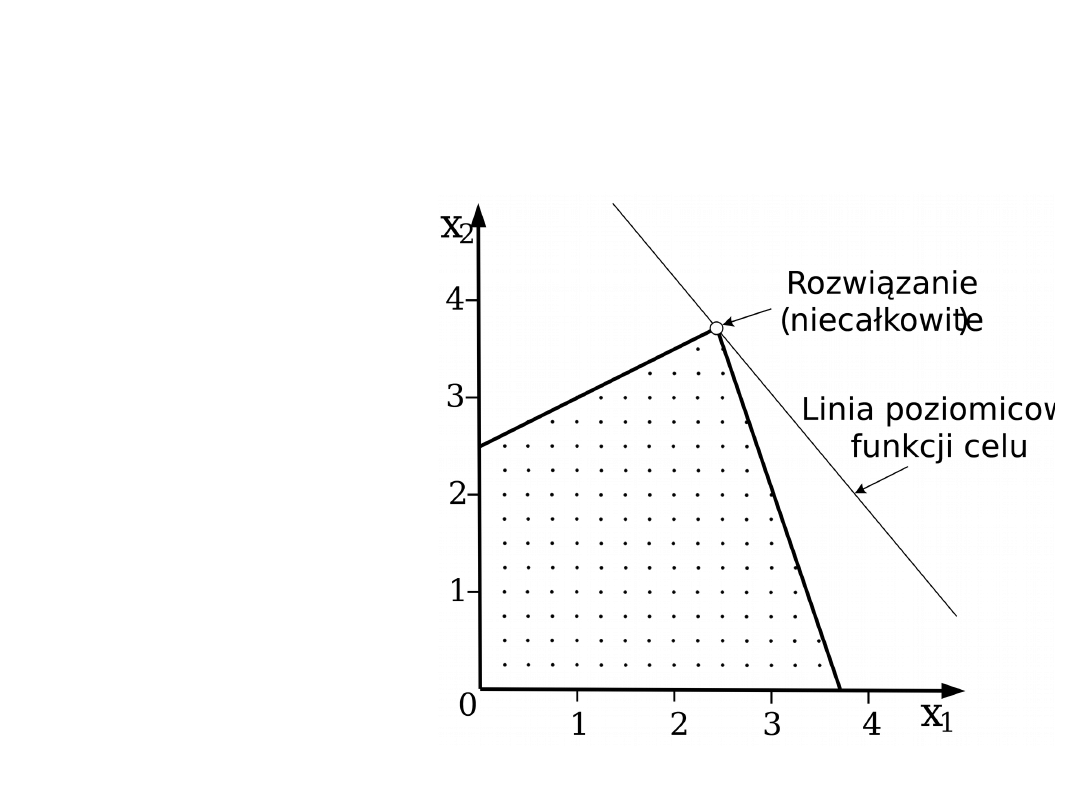
Metoda podziału i odcięć –
przykład (1)
min z = -6x
1
– 5x
2
p.o. 3x
1
+ x
2
11
-x
1
+ 2x
2
5
x
1
, x
2
0, całkowite
rozwiązanie LP
(niecałkowite)
x
1
= 2
3
/
7
x
2
= 3
5
/
7
z = -33
1
/
7
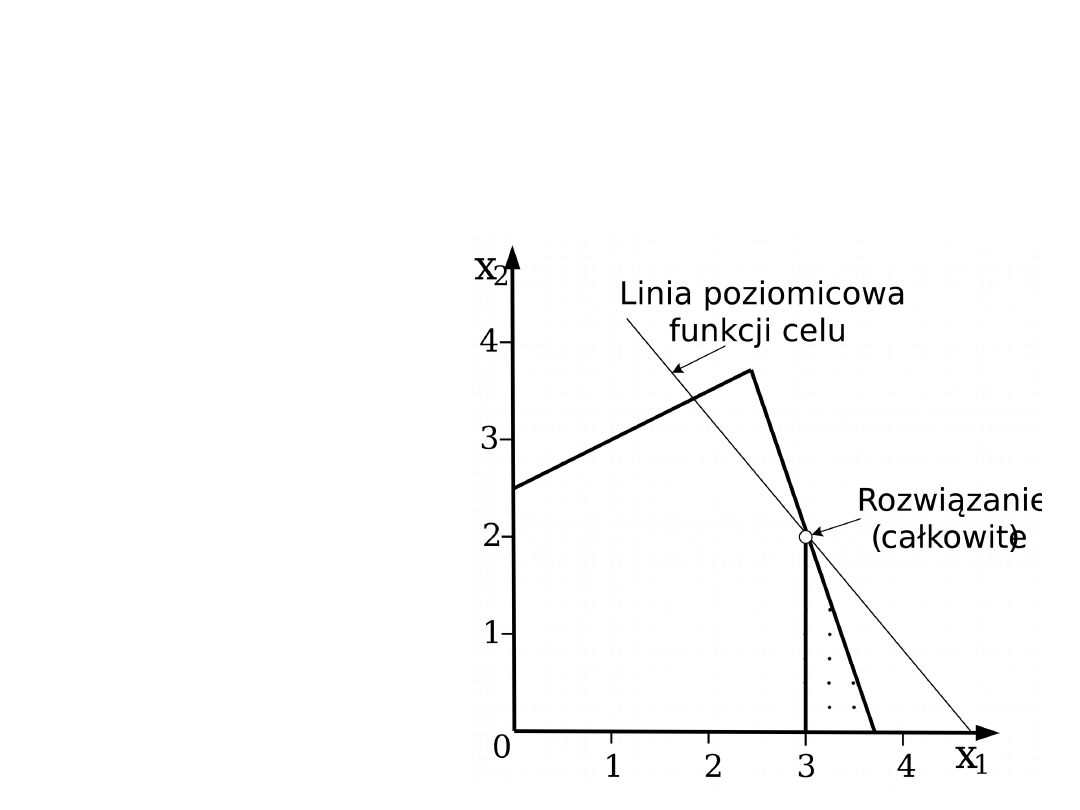
Metoda podziału i odcięć –
przykład (2)
Podział na dwa problemy względem zmiennej x
1
(x
1
3, x
1
2)
min z = -6x
1
– 5x
2
p.o. 3x
1
+ x
2
11
-x
1
+ 2x
2
5
x
1
3
x
1
, x
2
0,
całkowite
rozwiązanie LP
(całkowite)
x
1
= 3 x
2
= 2
z = -28
Koniec obliczeń dla
tego podproblemu
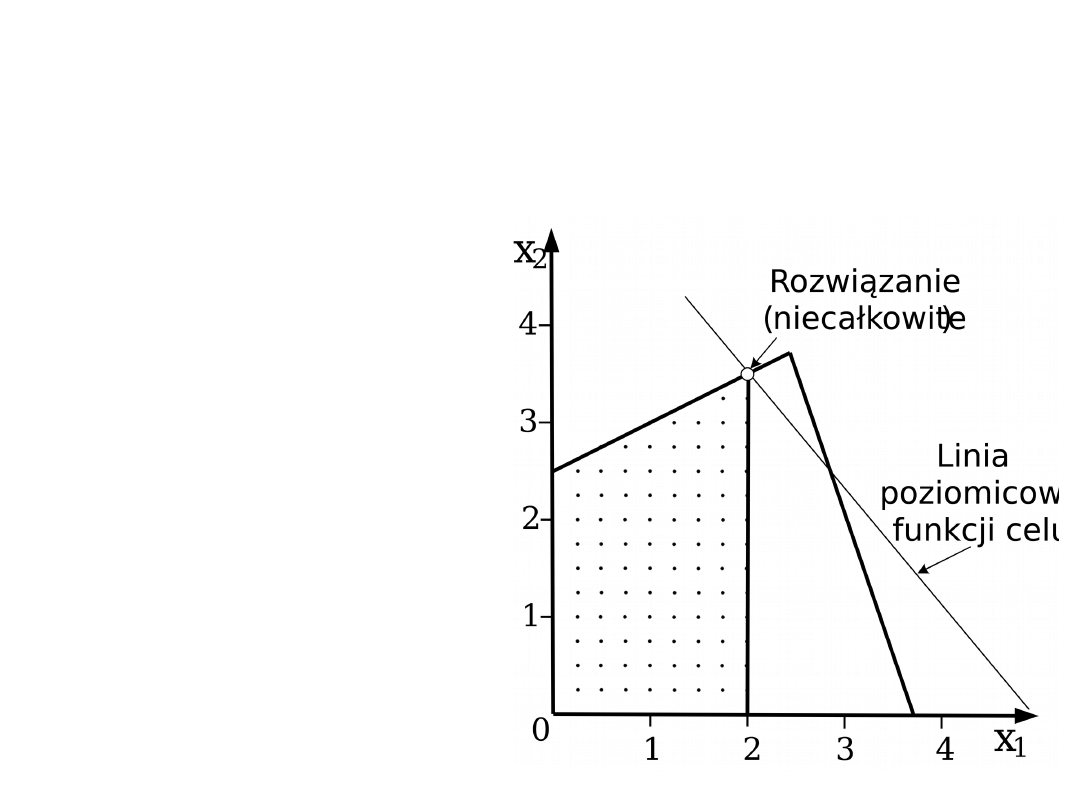
Metoda podziału i odcięć –
przykład (3)
min z = -6x
1
– 5x
2
p.o. 3x
1
+ x
2
11
-x
1
+ 2x
2
5
x
1
2
x
1
, x
2
0,
całkowite
rozwiązanie LP
(niecałkowite)
x
1
= 2 x
2
= 3,5
z = -29,5
Rozwiązanie nie
spełnia warunku
całkowitoliczbowości,
należy kontynuować
obliczenia
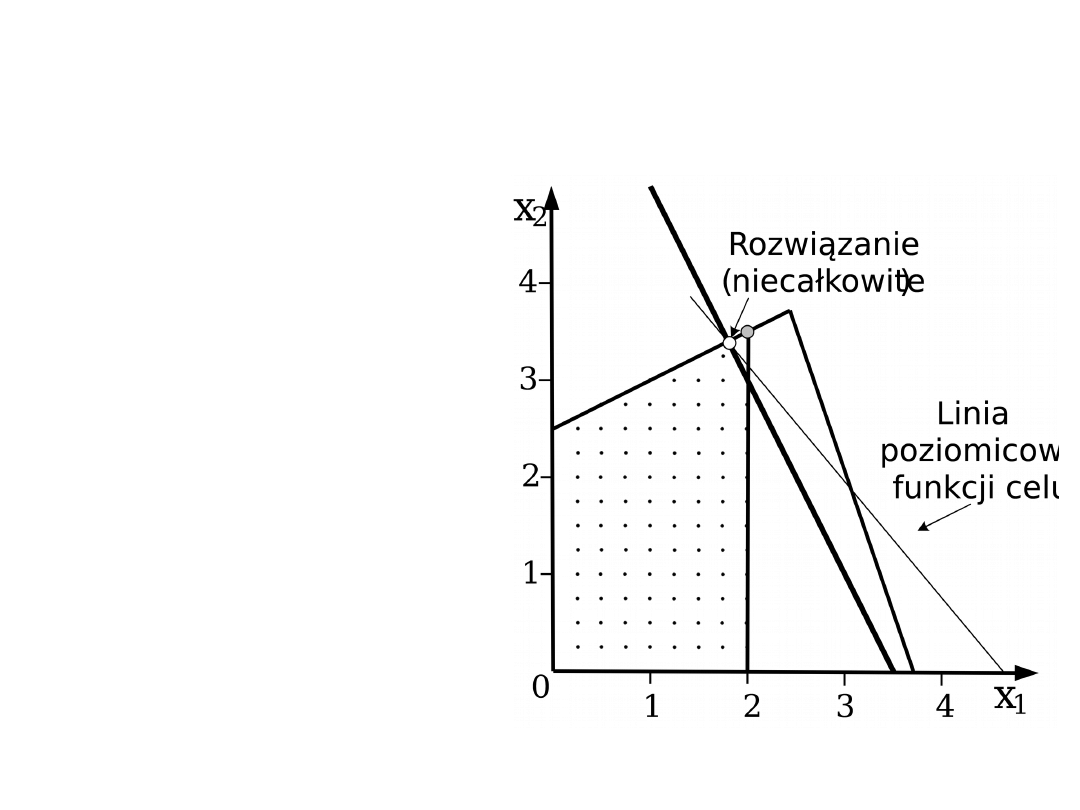
Metoda podziału i odcięć –
przykład (4)
Dodano nowe ograniczenie
min z = -6x
1
– 5x
2
p.o. 3x
1
+ x
2
11
-x
1
+ 2x
2
5
x
1
2
2x
1
+ x
2
7
x
1
, x
2
0, całkowite
rozwiązanie LP (niecałkowite)
x
1
= 1,8
x
2
= 3,4
z = -27,8
Otrzymana wartość jest większa niż dotychczas
znalezione rozwiązanie całkowitoliczbowe, koniec
obliczeń

Podsumowanie
• Wiele problemów optymalizacji to zadania
programowania liniowego, w których funkcja
kryterialna oraz ograniczenia są funkcjami
liniowymi, zmienne są ciągłe
• Najbardziej popularna metoda rozwiązywania
zadań programowania liniowego to Simplex
• Zadania, w których część zmiennych musi być
całkowita, należą do klasy NP.
• Jedynymi metodami rozwiązującymi zadania
całkowitoliczbowe to algorytmy oparte na
metodzie podziału i oszacowań
• Efektywną modyfikacją metody podziału i
oszacowań to metoda podziału i odcięć

Dodatkowa literatura
• M. Pióro, D. Medhi, „Routing, Flow, and Capacity Design in
Communication and Computer Networks”, Morgan Kaufman
Publishers 2004 (rozdział 5)
• W. Findeisen, J. Szymanowski, A. Wierzbicki, „Teoria i metody
obliczeniowe optymalizacji”, PWN, Warszawa 1980
• A. Stachurski, A. Wierzbicki, „Podstawy optymalizacji”, Oficyna
Wydawnicza Politechniki Warszawskiej, Warszawa 1999
• S. Gass, „Programowanie liniowe”, PWN, Warszawa 1973
• J. Buga, I. Nykowski, „Zagadnienia transportowe w programowaniu
liniowym”, PWN, Warszawa 1974
• I. Nykowski, „Programowanie liniowe”, PWE, Warszawa 1980
•
•
http://www-unix.mcs.anl.gov/otc/Guide/faq/linear-programming-faq
•
http://www.ee.ucla.edu/ee236a/ee236a.html
• J. Mitchell, „Branch-and-cut methods for combinatorial optimization
problems”, in the Handbook of Applied Optimization, Oxford
University Press 2002, http://www.rpi.edu/~mitchj/papers/bc_hao.pdf
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
Wyszukiwarka
Podobne podstrony:
ZMPST Metody optymalizacji 2
MATEMATYCZNE METODY OPTYMALIZACJI
A4?le i metody optymalizacji globalnej
Metody optymalizacji, Księgozbiór, Studia, Metody numeryczne
Metody optymalizacji N1 LAB 11 2
MATEMATYCZNE METODY OPTYMALIZACJI
ZagadnieniaMO, Studia, Studia sem VI, Metody optymalizacji
Raport, Edukacja, studia, Semestr VII, Ewolucyjne Metody Optymalizacji
sprawozdanie3 mo ok, Studia, Studia sem VI, Metody optymalizacji
91062851 Metody Optymalizacji Calosc Wykladow PDF
pytania, metody optymalizacji, Głupie pytanie
metody optymalizacji calosc wykladow pdf slajdy 2 grudnia 2010
więcej podobnych podstron