26.06.2013
Metody optymalizacji
Sprawozdanie zajęcia laboratoryjne nr. 3
Temat:
Rozwiązania zadań programowania nieliniowego bez ograniczeń z wykorzystaniem różnych metod.
MTA gr 1
Sekcja:2
sem.6 2012/13
Adam Zieliński
Dariusz Zeman
Celem ćwiczenia było zapoznanie się z zastosowaniem metod bezgradientowych, gradientowych oraz tzw. drugiego rzędu do rozwiązywania zadań ZPN bez ograniczeń.
Treść zadania
Dany jest wspornik o długości l=100m. Belka o stałym przekroju prostokątnym bxh zoatała wykonana z kołowego pręta o średnicy 2r, gdzie r=12m. Wspornik ten został obciążony na końcu siłą równą 0,5 KN. Należy wyznaczyć optymalne wymiary przekroju belki.
Przebieg ćwiczenia
Sformułowani funkcji celu.
Powyższe zadanie wymaga znalezienia dwóch długości prostokątnego przekroju belki, będącymi zmiennymi decyzyjnymi . W tym celu wykorzystany zostaje zależność naprężenia w zginanej belce.
gdzie
x1,x2-zmienne decyzyjne
Funkcja celu : Q(x)=
—> min
Rozwiązania zadania z wykorzystaniem funkcji fminunc służącej do otrzymywania wyników dla ZPN bez ograniczeń. Wybór 5 różnych punktów początkowych i sprawdzenie je funkcją fminunc dla algorytmów metod Quasi-Newtonowskich i Newtona -Raphsona.
clc;
P=500;
l=100;
f=@(x)(6*P*l)/(x(1)*x(2)^2);
x0=[1,1];
options=optimset('HessUpdate','dfp','PlotFcns',@optimplotfval,'Display','Iter');
a=1;
[x,fval,exitflag] = fminunc(f, x0, options)
punkt startowy |
x |
f(x) |
flag |
l.iteracji |
[1,1] |
24,8 35,9 |
9,3227 |
1 |
20 |
[2,3] |
70 98 |
0,7006 |
1 |
22 |
[5,5] |
131 200 |
0,05 |
1 |
23 |
[10,10] |
250 379 |
0,008 |
1 |
23 |
[12,14] |
340 494 |
0,003 |
1 |
23 |
Tablica wyników dla różnych punktów początkowych
metoda Q-Newtona
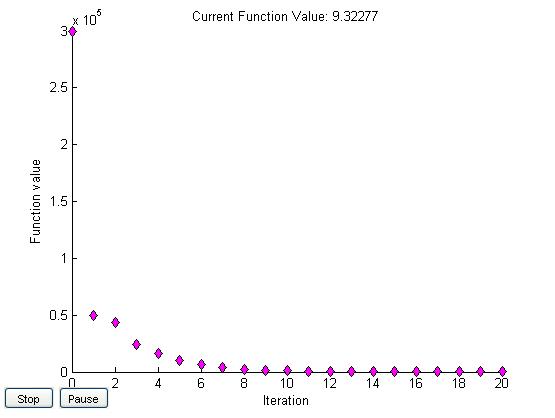
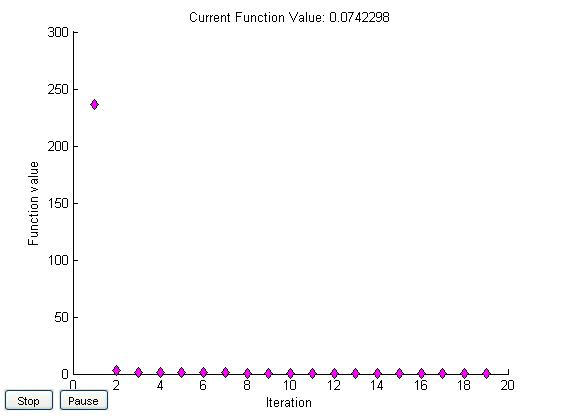
Graficzna reprezentacja wyników
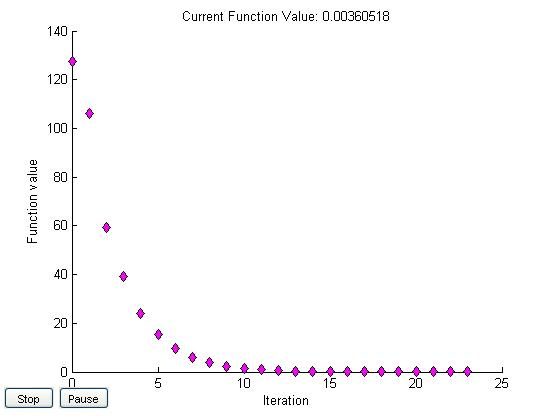
X0=[1,1]
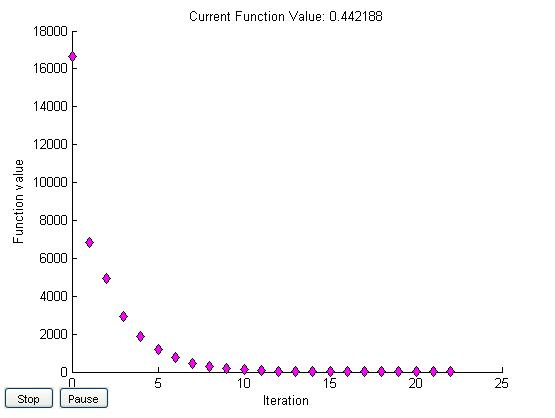
x0=[2,3]
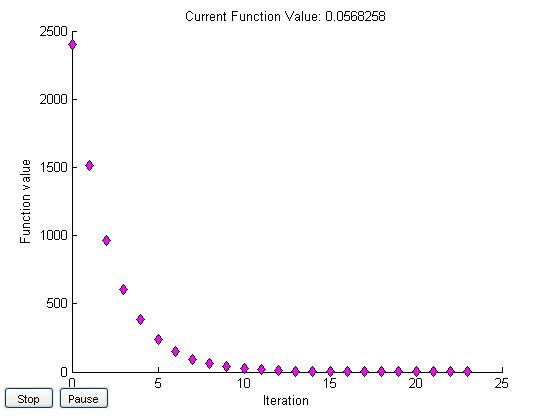

x0=[5,5]
x0=[10,10]
x0=[12,14]
Powyższe wyniki zostały uzyskane dla algorytmu quasi-newtona.
Przez zamianę w kodzie dfp na steepdesc w ustawieniach optymalizacji (optimset),
można uzyskać wyniki dla metody najszybszego spadku.
punkt startowy |
x |
f(x) |
flag |
l.iteracji |
[1,1] |
28 40,3 |
6,582 |
1 |
8 |
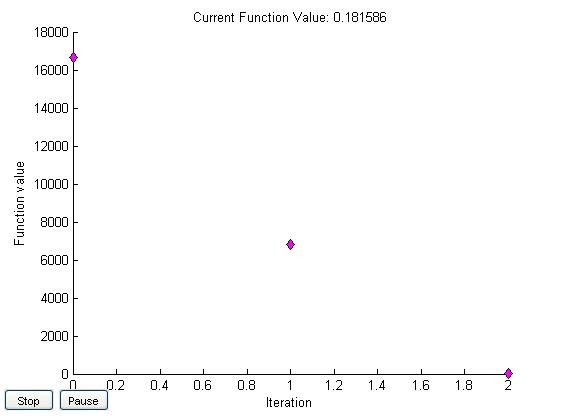
[2,3] |
95,4 131,5 |
0,181 |
1 |
2 |
[5,5] |
105,6 184,1 |
0.08 |
1 |
3 |
[10,10] |
125,6 179,4 |
0,07 |
0 |
19 |
[12,14] |
106,4 150,4 |
0,12 |
0 |
25 |
Tablica wyników dla różnych punktów początkowych
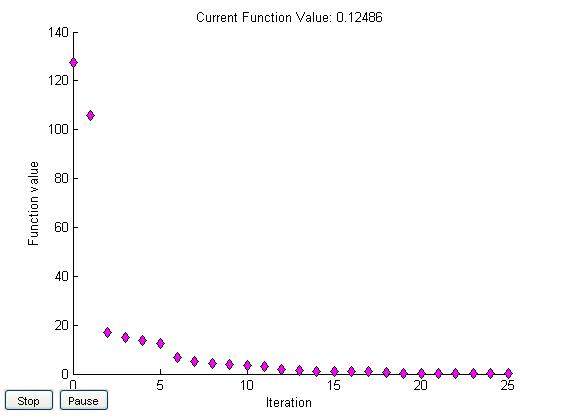
metoda najszybszego spadku
Graficzna interpretacja wyników
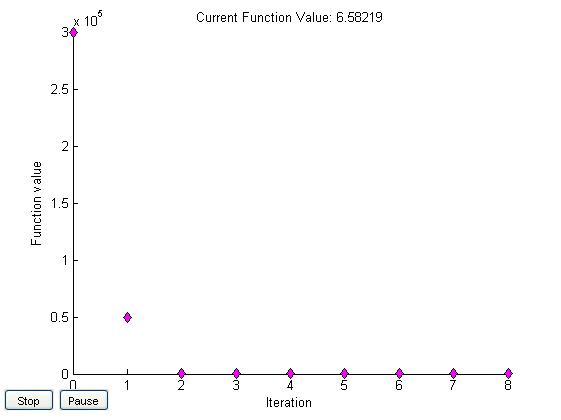
x0=[1,1]
x0=[2,3]
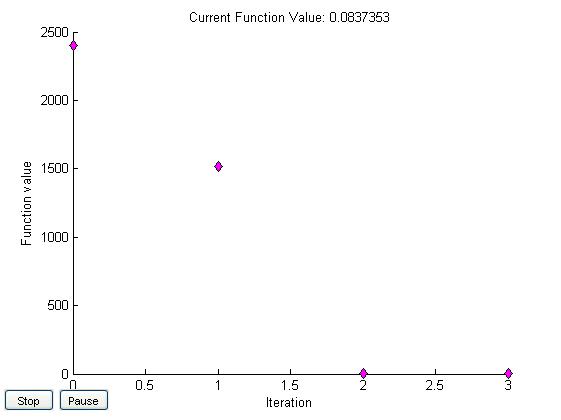
x0=[5,5]
x0=[10,10]
x0=[12,14]
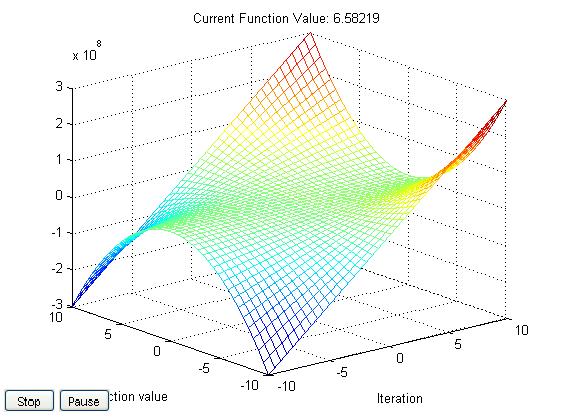
Wykres przedstawiający obszar dopuszczalnych rozwiązań z wybranego przedziału rozwiązań.
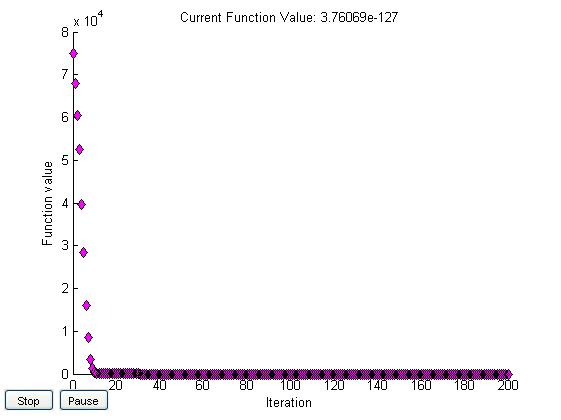
Przykładowy wykres dla funkcji fminsearch zastępującej fminunc dla punktu początkowego x0=[1,1]
Wnioski
-dla różnych punktów rezultaty znacznie się od siebie różnią, co wskazuje że istotnym dla poznanych metod, jest dobór punktu początkowego.
-metoda quasi-newtonowska cechuje się znajdowaniem wyniku dla punktu w zbliżonej liczbie iteracji, w porównaniu do metody najszybszego spadku.
-w obydwu przypadkach wartości funkcji zmniejszają się , wraz z kolejnymi punktami startowymi.
-funkcje fminunc wykazują się szybszym czasem znajdowania rozwiązania, w porównaniu do funkcji minsearch( mniejsza liczba iteracji).
-ze względu na charakter metod rozwiązywania ZPN bez ograniczeń, otrzymane rozwiązania powinny być sprawdzone
Wyszukiwarka
Podobne podstrony:
ZagadnieniaMO, Studia, Studia sem VI, Metody optymalizacji
sprawozdanie belka DMIUM+teoria, Studia, Studia sem VI, Dynamika maszyn i urzadzen mechatr, DMIUM by
sprawozdanie dcdc, Politechnika Lubelska, Studia, Studia, sem VI, VI-semestr, 02labenergo
sprawozdanie urządzeń - przekładniki3, Politechnika Lubelska, Studia, Studia, sem VI, VI-semestr, 07
SURTEL, Politechnika Lubelska, Studia, Studia, sem VI, energoelektronika, Energoelektronika, Surtel
Test-Elektronika D, Politechnika Lubelska, Studia, Studia, sem VI, z ksero na wydziale elektrycznym
18P, Politechnika Lubelska, Studia, Studia, sem VI, semestr 6, napędy elektryczne
Technika Łączenia 4 - nagrzew. gł. toru prąd, Politechnika Lubelska, Studia, Studia, sem VI, z ksero
Podstawy elektroniki - informatyka - program - gablota, Politechnika Lubelska, Studia, Studia, sem V
Urządzenia 4. - parametry łączników, Politechnika Lubelska, Studia, Studia, sem VI, z ksero na wydzi
Ściąga-Fizyka ED 7, Politechnika Lubelska, Studia, Studia, sem VI, z ksero na wydziale elektrycznym
Badanie instalacji niskiego napięcia, Politechnika Lubelska, Studia, Studia, sem VI, VI-semestr, 03l
Urządzenia 4. - parametry łączników, Politechnika Lubelska, Studia, Studia, sem VI, z ksero na wydzi
Urządzenia 2 - pomiar prędkości łuku, Politechnika Lubelska, Studia, Studia, sem VI, z ksero na wydz
pijarski, Politechnika Lubelska, Studia, Studia, sem VI, VI-semestr, SJESJA, Sieci-wyklady, sieci-ma
odpowiedzi nie wszystkie, Politechnika Lubelska, Studia, Studia, sem VI, VI-semestr, SJESJA, Sieci-w
więcej podobnych podstron