Metody optymalizacji 2

Program wykładu
• Zadanie programowania nieliniowego
• Warunki optymalności zadania programowania
nieliniowego (warunki Kuhna-Tuckera)
• Relaksacja Lagrange’a
• Dualność w programowaniu nieliniowym
• Obliczenia inteligentne
• Local search
• Symulowane wyżarzanie
• Algorytm ewolucyjny
• Tabu search
• Algorytm mrówkowy
• GRASP

Zadanie programowania
nieliniowego
• Programowanie nieliniowe NLP (ang. Nonlinear
Programming) to klasa problemów programowania
matematycznego, które nie spełniają warunków
programowania liniowego, czyli albo niektóre
ograniczenia albo funkcja celu nie są liniową
• W przypadku kiedy ograniczenia oraz funkcja celu
spełniają specjalne warunki można sformułować
kryteria optymalności dla zadania NLP
• Przybliżoną metodą rozwiązywania zadań NLP jest
przybliżenie nieliniowych funkcji za pomocą funkcji
liniowych i sprowadzenie zadania NLP do klasy LP

Sformułowania zadanie
programowania nieliniowego
Zadanie NLP z ograniczeniami nierównościowymi
min f(x)
xR
n
p.o. g
i
(x) 0 dla i I
Zadanie NLP z ograniczeniami równościowymi
min f(x)
xR
n
p.o. h
j
(x) = 0 dla j E
Zadanie NLP
min f(x)
xR
n
p.o. g
i
(x) 0 dla i I
h
j
(x) = 0 dla j E
Warunki optymalności
zadania nieliniowego (1)
Definicja. Punkty spełniające ograniczenia zadania NLP
to punkty dopuszczalne
Definicja. Kierunek d wychodzący z punktu x
spełniającego ograniczenia jest dopuszczalny, jeżeli
istnieje
> 0, że dla dowolnego 0
<
punkt x +
d spełnia ograniczenia zadania
Definicja. W punkcie dopuszczalnym zbiór ograniczeń
zadania NLP można podzielić na dwa zbiory
• Zbiór ograniczeń aktywnych A(x) = {i I : g
i
(x) =
0}
• Zbiór ograniczeń nieaktywnych, dla których g
i
(x) <
0

Warunki optymalności
zadania nieliniowego (2)
Załóżmy, że funkcje f : X = R
n
R
1
oraz g
i
: X = R
n
R
1
będą funkcjami różniczkowalnymi oraz niech
jest x
minimum lokalnym rozważanego zadania
NLP.
Niech A(x
) oznacza zbiór ograniczeń aktywnych w x
.
Kierunek dopuszczalny d w x
musi spełniać warunek
g
i
(x
+
d) 0 dla każdego i A(x
)
Wykorzystując szereg Taylora możemy zapisać
g
i
(x
+
d) = g
i
(x
) +
g
i
(x
)
T
d + O(
) 0
stąd warunkiem koniecznym, aby kierunek d był
dopuszczalny jest
g
i
(x
)
T
d 0 dla każdego i A(x
)
Warunki optymalności
zadania nieliniowego (3)
Nie zawsze kierunki spełniające powyższy warunek
są kierunkami dopuszczalnymi
Ma to miejsce tylko wtedy, gdy spełnione są pewne
dodatkowe warunki nazwane warunkami
regularności ograniczeń
Ponadto, ażeby punkt x
był punktem minimum, to
każdy kierunek dopuszczalny musi być kierunkiem,
na którym wartość funkcja będzie wzrastać. Stąd
wynika, że w punkcie optymalnym x
dla wszystkich
dopuszczalnych kierunków d musi być spełniona
następująca nierówność
f(x
)
T
d 0

Warunki optymalności
zadania nieliniowego (4)
Lemat Farkasa. Warunki g
i
(x
)
T
d 0 i A(x
) oraz
f(x
)
T
d 0 oznaczają, że wektor pochodnej
minimalizowanej funkcji celu f(x
) należy do stożka
rozpiętego na wektorach {-g
i
(x
), i A(x
)} .
To stwierdzenie jest równoważne zapisowi, że wektor
funkcji celu w punkcie optymalnym można zapisać
jako liniowa kombinacja (o niedodatnich
współczynnikach) pochodnych ograniczeń w tym
punkcie
f(x
) =
iA(x)
i
g
i
(x
)
Współczynniki rozwinięcia
nazywamy mnożnikami
Lagrange’a związanymi z ograniczeniami aktywnymi
Dla ograniczeń nieaktywnych możemy przyjąć wartości
mnożników jako 0

Warunki regularności
Przykładowe warunki regularności
• Wszystkie funkcje ograniczeń g
i
są funkcjami
linowymi
• Wszystkie funkcje ograniczeń g
i
są funkcjami
wypukłymi oraz istnieje punkt x, że g
i
(x) < 0 dla
wszystkich indeksów i I
• Gradienty wszystkich ograniczeń aktywnych są
liniowo niezależne

Warunki Kuhna-Tuckera (1)
Warunki konieczne optymalności Kuhna-Tuckera dla
zadań z ograniczeniami nierównościowymi
1. f(x) +
iI
i
g
i
(x) = 0
2. g
i
(x) 0 dla i I
3.
i
0 dla i I
4.
i
g
i
(x) = 0 dla i I lub
iI
i
g
i
(x) = 0
Aby przedstawione warunki były warunkami
wystarczającymi muszą być spełnione dodatkowe
warunki regularności

Warunki Kuhna-Tuckera (2)
Warunki konieczne optymalności Kuhna-Tuckera dla
zadań z ograniczeniami równościowymi
1. f(x) +
jE
j
h
j
(x) = 0
2. h
j
(x) = 0 dla j E
Warunki konieczne optymalności Kuhna-Tuckera dla
zadań z ograniczeniami równościowymi i
nierównościowymi
1. f(x) +
iE
j
hj(x) +
iI
i
g
i
(x) = 0
2. g
i
(x) 0 dla i I
3. h
j
(x) = 0 dla j E
4.
i
0 dla i I
5.
i
g
i
(x) = 0 dla i I
Warunki KT – przykład (1)
indeksy
i = 1,2,…,n zmienne (łuki w sieci)
stałe
c
i
przepustowość łuku i
D suma przepływów w sieci
zmienne
f
i
zmienna i (przepływ w łuku i)
minimalizować
min T =
i
f
i
/(c
i
– f
i
)
ograniczenia
f
i
c
i
dla i = 1,2,…,n (ograniczenie g
i
)
D –
i
f
i
= 0 (ograniczenie g)

Warunki KT – przykład (2)
Każde z ograniczeń jest liniowe, ponadto funkcja
kryterialna jest wypukła, więc warunki Kuhna-
Tuckera są w tym przypadku warunkami
koniecznymi i wystarczającymi
Warunki te można zapisać w następujący sposób
c
i
/(f
i
– c
i
)
2
–
+
i
= 0 dla i = 1,2,…,n
(f
i
– c
i
)
i
= 0 dla i = 1,2,…,n
(D –
i
f
i
)
= 0
i
0 dla i = 1,2,…,n
Warunki KT – przykład (3)
Z pierwszego warunku otrzymujemy
Pomijając znak „+” otrzymamy, f
i
c
i,
, co zapewni
spełnienie ograniczeń g
i
dla i = 1,2,…,n.
Ponadto zauważmy, że ze względu na konstrukcję
funkcji kryterialnej musi być spełnione f
i
< c
i
, co
z kolei prowadzi do zależności
i
= 0 dla i = 1,2,…,n
Stąd mamy
i
i
i
i
c
c
f
i
i
i
c
c
f
Warunki KT – przykład (4)
Podstawiając otrzymaną wartość do ograniczenia g
otrzymujemy
Podstawiając do poprzedniej zależności mamy
Otrzymane rozwiązanie spełnia ograniczenia
problemu oraz warunki Kuhna-Tuckera, więc jest
optymalne.
2
i i
i
i
D
c
c
i
i
i i
i
i
i
c
D
c
c
c
f

Funkcja Lagrange’a (1)
Wprowadźmy tzw. funkcję Lagrange’a
L(x,) = f(x) +
jE
j
h
j
(x) +
iI
i
g
i
(x) = 0
gdzie jest wektorem mnożników Lagrange’a, R
m
Za pomocą funkcji Lagrange’a można zapisać
warunki Kuhna-Tuckera w następujący sposób
1.
x
L(x,) = 0
2.
i
L(x,) 0 i I
3.
j
L(x,) = 0 dla j E
4.
i
0 dla i I
5.
iI
i
i
L(x,) = 0
Funkcja Lagrange’a (2)
Definicja. Punkt <x
,
>,
0,
R
m
, x
X jest
punktem siodłowym funkcji L(x,), jeśli spełnia
L(x
,
) L(x,
), x X
L(x
,
) L(x
,), 0, R
m
Twierdzenie. Niech 0 oraz x
X. Punkt <x
,
>
jest punktem siodłowym funkcji L(x,) wtedy i
tylko wtedy gdy
(a) x
minimalizuje L(x,
) dla x
X
(b) g
i
(x
) 0 dla i I
(c)
i
g
i
(x
) = 0 dla i I
Twierdzenie. Jeśli punkt <x
,
> jest punktem
siodłowym funkcji Lagrange’a L(x,), to x
jest
rozwiązaniem optymalnym zadania NLP
Dualność w programowaniu
nieliniowym (1)
Niech będzie dana funkcja Lagrange’a L(x,)
określona na zbiorach X R
n
oraz
= { : R
m
,
0} o postaci
L(x,) = f(x) + g(x)
przy czym f : X R
1
oraz g: X R
m
.
Definicja. Funkcję L
P
(x) nazywamy funkcją
pierwotną, gdy L
P
(x) = f(x), jeśli wszystkie g
i
(x)
0, + w przeciwnym razie
Definicja. Funkcję L
D
() nazywamy funkcją dualną,
gdy
L
D
() = inf
xX
L(x,)

Dualność w programowaniu
nieliniowym (2)
Pierwotne zadanie optymalizacji można
interpretować jako poszukiwanie takiego x
X
R
n
, że
L
P
(x
) = min
xX
L
P
(x)
Dualne zadanie optymalizacji polega na
znalezieniu takiego
, że
L
P
(
) = min
L
D
()
Twierdzenie (o słabej dualności). Niech będzie x
punktem dopuszczalnym zadania pierwotnego.
Niech punkt będzie punktem dopuszczalnym
zadania dualnego. Wtedy
L
P
(x) L
D
()

Dualność w programowaniu
nieliniowym (3)
Minimum wartości funkcji celu zadania pierwotnego jest
większe bądź równe maksimum wartości funkcji celu
zadania dualnego
Jeżeli punkt jest x
pierwotnie dopuszczalny, a punkt
jest
dualnie dopuszczalny oraz f(x
) = L
D
(
) to x
jest
rozwiązaniem optymalnym zadania pierwotnego, a
jest rozwiązaniem optymalnym zadania dualnego.
Jeżeli zadanie pierwotne jest nieograniczone, to dualna
funkcja celu jest równa minus nieskończoności
Jeżeli supremum w zadaniu dualnym jest równe plus
nieskończoności, to zadanie pierwotne jest
sprzeczne
Dualność w programowaniu
nieliniowym (4)
Definicja. W przypadku gdy obydwa zadania –
pierwotne oraz dualne – mają rozwiązanie
optymalne x
oraz
, może się okazać, że
f(x
) > L
D
(
)
Mówimy wtedy o tzw. odstępie dualności
Twierdzenie (o silnej dualności). Dla zadania, w
którym funkcja celu jest wypukła, funkcje
ograniczeń nierównościowych są wypukłe, a
funkcje ograniczeń równościowych są liniowe
odstęp dualności wynosi zero

Obliczenia inteligentne
• Obliczenia inteligentne (ang. Computational
Intelligence) to grupa heurystycznych algorytmów
takich jak: sieć neuronowa i obliczenia ewolucyjne,
symulowane wyżarzanie, algorytmy mrówkowe
• Metody obliczeń inteligentnych często mają charakter
stochastyczny, gdyż stosują pewien element
losowy w czasie przeglądania i analizy kolejnych
rozwiązań
• Metody obliczeń inteligentnych to algorytmy
heurystyczne, które potrafią wyznaczyć jednie
przybliżone, suboptymalne rozwiązanie
• Algorytmy rozwiązują problem dyskretny postaci
min F(x) dla x S
gdzie S to skończona przestrzeń dopuszczalnych
rozwiązań

Local Search (1)
• Metoda Local Search używa pojęcia sąsiedztwa
(ang. neighborhood)
• Sąsiedztwo punktu x S, N(x) to podzbiór
przestrzeni rozwiązań N(x) S, takie że x N(S)
• Główny wymóg dotyczący sąsiedztwa {N(x), x S}
jest taki, że dla dowolnych punktów x,y S istnieje
sekwencja punktów z
1
, z
2
,… z
p
należących S do
takie, że z
1
N(x), z
2
N(z
1
),… z
p
N(z
p-1
) oraz y
N(z
p
)
• Oznacza to, że dowolnego punktu y S można dojść
z dowolnego punktu x S przechodząc przez kolejne
sąsiedztwa

Local Search (2)
Metoda Local Search with Steepest Descent (SDLS)
w każdym kroku szuka najlepszego polepszenia
wartości funkcji celu
procedure SDLS
begin
choose initial point(x);
repeat
z := x;
for y N(x) do if F(y) < F(z) then z := y;
until z = x
end { procedure }

Symulowane wyżarzanie (1)
• Algorytm symulowane wyżarzanie (ang.
simulated annealing SAN) swoje działanie
przypomina zjawisko wyżarzania w metalurgii
• Po wybraniu początkowego punktu x S i
ustaleniu początkowej temperatury T
0
(zazwyczaj
duża liczba), algorytm przechodzi do wewnętrznej
pętli z ustaloną temperaturą
• Wtedy wewnętrzna pętla jest wykonywana L razy,
polega ona na losowym wyborze sąsiedniego do x
punktu y (y N(x)) i przeprowadzeniu testu czy
wykonać przejście z x do y

Symulowane wyżarzanie (2)
• Przejście z x do y jest zawsze akceptowane, jeżeli
powoduje polepszenie wartości funkcji celu
• W przeciwnym razie przejście x do y jest
akceptowane z pewnym prawdopodobieństwem
e
-F/T
• Po wykonaniu wewnętrznej pętli L razy, temperatura
jest zmniejszana i wewnętrzna pętla jest
wykonywana ponownie
• Warunek stopu to zmniejszenie się temperatury
do pewnej wartości lub brak poprawy wartości
funkcji celu po dwóch kolejnych zewnętrznych
pętlach

Symulowane wyżarzanie (3)
procedure SAN
begin
choose initial point(x); x
best
:= x; F
best
= F(x
best
);
T := T
0
;
while stopping criterion not true
begin
l := 0;
while l < L do
begin
z := random neighbor(N(x));
∆F := F(z) − F(x);
if ∆F ≤ 0 then
begin
x := z;
if F(x) < F
best
then begin F
best
:= F(x); x
best
:= x end;
end
else if random(0, 1) < e
−∆F/T
then x := z;
l := l + 1;
end
reduce temperature(T);
end
end { procedure }

Algorytm Ewolucyjny (1)
• W większości algorytmów ewolucyjnych (ang.
Evolutionary Algorithm) początkowo losuje się zbiór
rozwiązań dopuszczalnych (zwanych osobnikami), a
następnie poprawia się je za pomocą operatorów
ewolucyjnych (jak mutacja, krzyżowanie, selekcja)
• Algorytm ewolucyjny operuje na populacji osobników
• Populacje krążą w cyklu reprodukcji populacji
rodzicielskiej na populację potomną, operacji
genetycznych na populacji potomnej, oceny
osobników względem zadanego środowiska i sukcesji
osobników potomnych do populacji rodzicielskiej
• Po wielokrotnej iteracji tego cyklu otrzymujemy, z
reguły, osobniki coraz lepiej przystosowane do
środowiska

Algorytm Ewolucyjny (2)
• Chromosom, który jest sekwencją pojedynczych genów
umożliwia zapisanie punktów w przestrzeni rozwiązań
• Funkcja oceny to miara jakości dowolnego osobnika
(rozwiązania) w populacji
• Krzyżowanie polega na połączeniu niektórych
(wybierane losowo) genotypów w jeden
• Popularna metoda selekcji osobników do krzyżowania do
metoda ruletki, wykorzystująca funkcję oceny
• Mutacja wprowadza do genotypu losowe zmiany, jej
zadaniem jest wprowadzanie różnorodności w populacji
• Warunek stopu to wykonanie określonej liczby iteracji
lub brak poprawy wartości funkcji celu po dwóch
kolejnych zewnętrznych pętlach

Algorytm Ewolucyjny (3)
Algorytm ewolucyjny (M + L)
procedure MLEA
begin
initialize(P); k := 0;
while stopping criterion not true
begin
Θ := ∅;
for i := 1 to L do Θ := Θ crossover(P);
for x Θ do if random(0,1) < q then
mutate(x);
P := select best(Θ P)
k := k + 1;
end
end { procedure }

Tabu Search (1)
• Podstawową ideą algorytmu Tabu Search jest
przeszukiwanie przestrzeni, stworzonej ze
wszystkich możliwych rozwiązań, za pomocą
sekwencji ruchów
• W sekwencji ruchów istnieją ruchy
niedozwolone, ruchy tabu
• Algorytm unika oscylacji wokół optimum
lokalnego dzięki przechowywaniu informacji o
sprawdzonych już rozwiązaniach w postaci listy
tabu (TL)
• Twórcą algorytmu jest Fred Glover

Tabu Search (2)
procedure TS
begin
choose initial point(x); F
best
:= F(x); x
best
:= x;
T := ∅;
while stopping criterion not true do
begin
N
∗
:= N(x);
repeat
y := best neighbor (N
∗
);
N
∗
:= N
∗
\{y}
until (y, x)
T ;
update (T );
T := T
{(y, x)};
if F(x) ≤ F
best
then begin F
best
:= F(x); x
best
:= x end;
x := y
end
end { procedure }

Algorytm mrówkowy (1)
• Algorytm mrówkowy (ang. Ant Colony
Pptimization – ACO) został opracowany przez
Marco Dorigo w jego pracy doktorskiej
• Algorytm mrówkowy jest techniką przeznaczona
głównie dla problemów wyszukiwania
najlepszych ścieżek w grafie
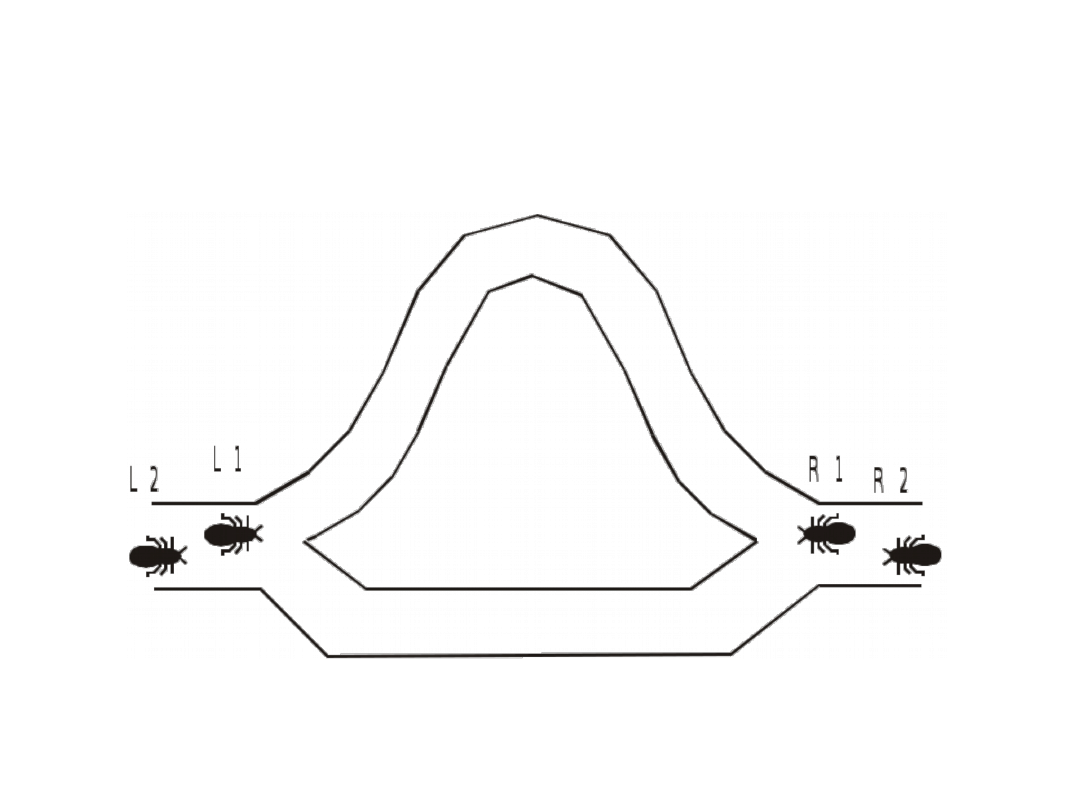
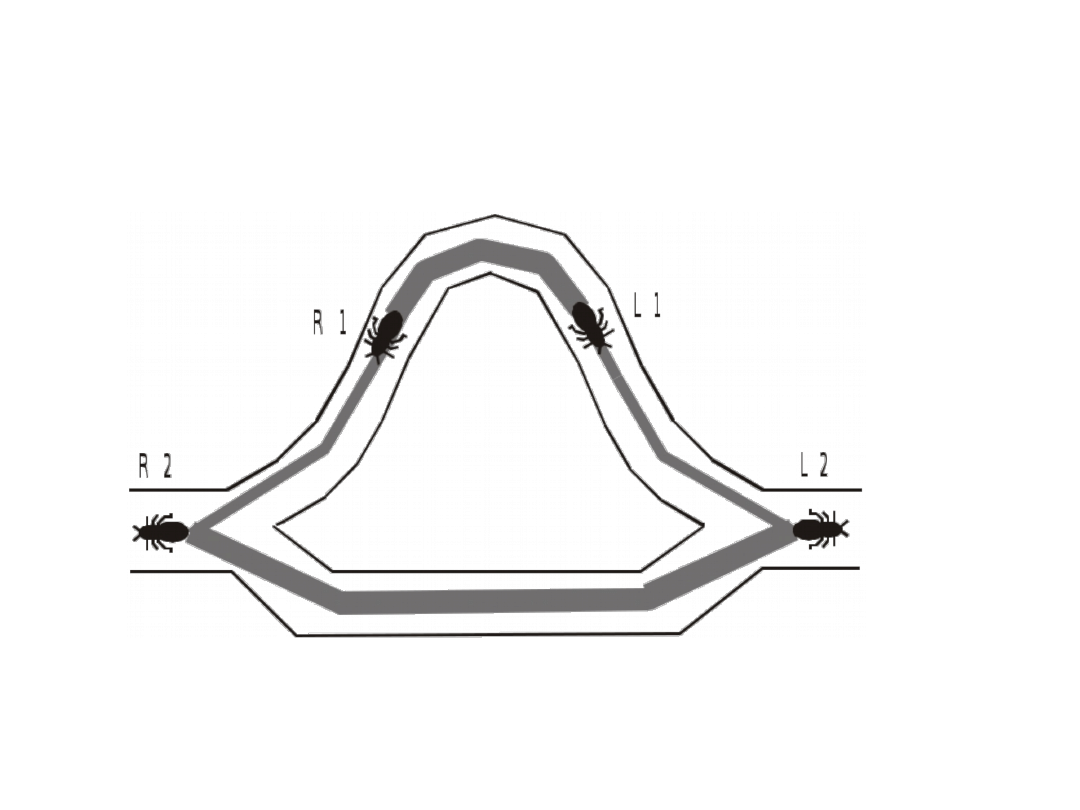
• Inspiracja pochodzi ze świata mrówek, które
potrafią znaleźć najkrótszą trasę między
mrowiskiem a pożywieniem
• Na początku mrówki wędrując w stronę pożywienia
wybierają trasę losowo, ale wracając do mrowiska
pozostawiają na swojej trasie ślad feromonowy

Algorytm mrówkowy (2)
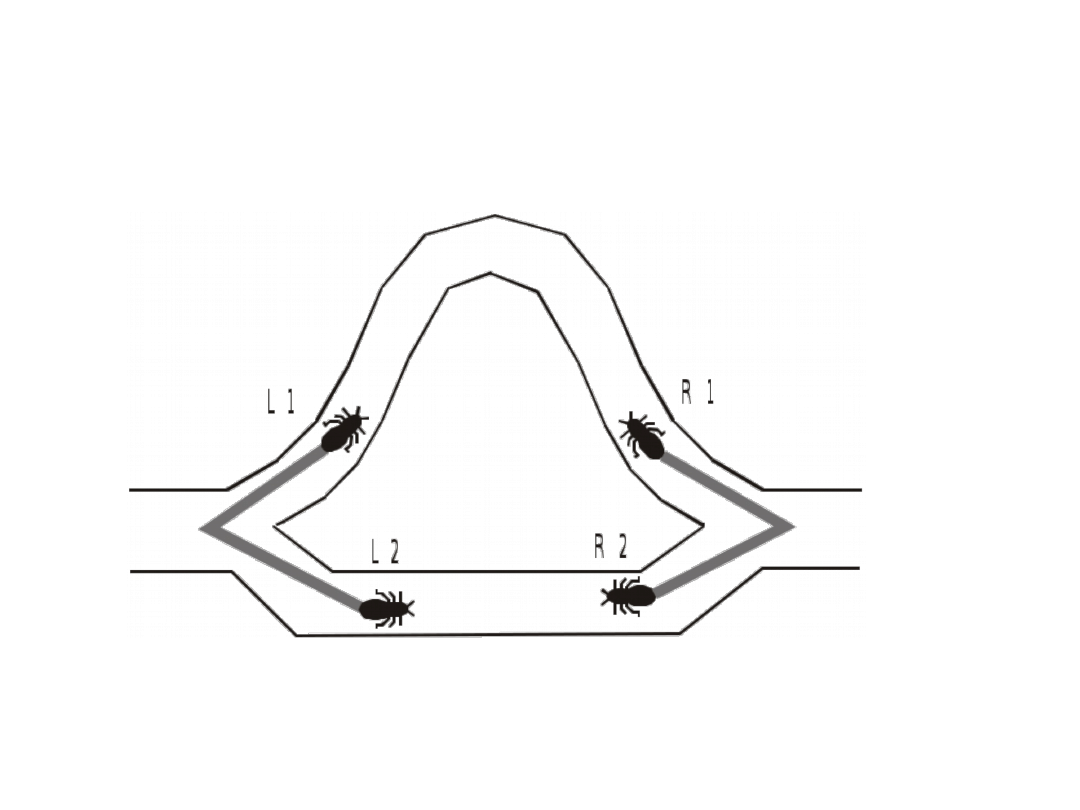
• Feromony stopniowo parują
• Na krótszej trasie parowanie jest stosunkowo
wolniejsze niż na innych trasach, więc kolejne
mrówki wybierają tą trasę chętniej niż inne trasy
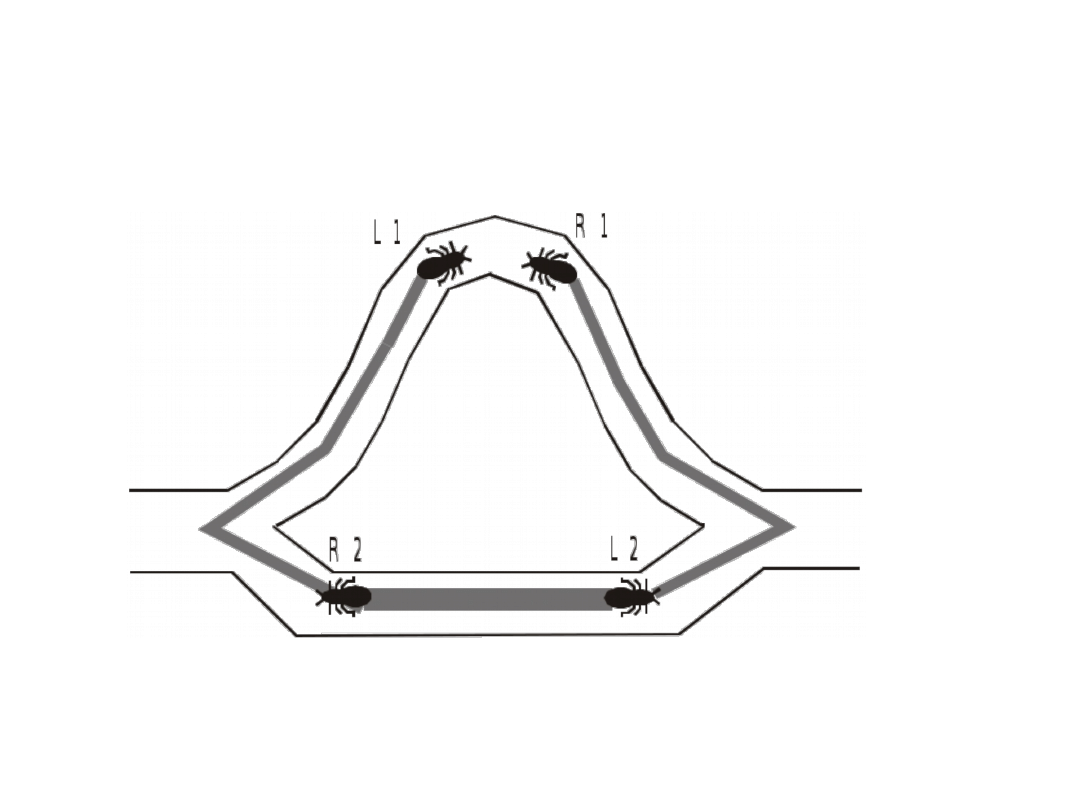
• Kiedy zostanie znaleziona korzystna dla mrówek
trasa, kolejne mrówki wybierają ją chętniej
wzmacniając ślad feromonowy, jest to zjawisko
pozytywnego sprzężenia zwrotnego
• Algorytm mrówkowy został z powodzeniem użyty
do problemu komiwojażera (ang. traveling
salesman problem – TSP) i problemu routing w
sieciach teleinformatycznych
Algorytm mrówkowy (3)
Algorytm mrówkowy (3)
Algorytm mrówkowy (3)
Algorytm mrówkowy (3)

Algorytm mrówkowy (4)
procedure ACO_meta_heuristic()
while (termination_criterion_not_satisfied)
schedule_activities
ants_generation_and_activity();
pheromone_evaporation();
deamon_actions(); {optional}
end schedule_activities
end while
end procedure
procedure ants_generation_and_activity()
while (available_resources)
schedule_the_creation_of_a_new_ant();
new_active_ant();
end while
end procedure

Algorytm mrówkowy (5)
procedure new_active_ant() {ant lifecycle}
initialize_ant();
M = update_ant_memory();
while (current_state target_state)
A = read_local_ant_routing_table();
P = compute_transition_probabilities(A,M,);
next_state = apply_ant_decision_policy(P,);
move_to_next_state(next_state);
if (online_step_by_step_pheromone_update)
deposit_phermone_on_the_visited_arc();
update_ant_routing_table();
end if
M = update_internal_state();
end while
if (online_delayed_pheromone_update)
for each visted_arc do
deposit_pheromone_on_the_visited_arc();
update_ant_routing_table();
end foreach
end if
die();
end procedure

GRASP (1)
• GRASP (ang. greedy randomized adaptive search
procedure) to metoda polegająca na
wykonywaniu wielu iteracji składających się z
dwóch etapów: konstrukcji rozwiązania oraz
polepszania rozwiązania
• W etapie konstrukcji rozwiązania są generowane
losowe wykorzystując proste heurystyki
zachłanne (ang. greedy) oraz list RCL (ang.
restricted candidate list)
• W drugim etapie, rozwiązanie otrzymane w
pierwszym etapie jest polepszana za pomocą
innych metod, np. local search

GRASP (2)
procedure grasp( f (),g(),maxitr,x*)
x* = ;
for k = 1,2,…,maxitr do
construct(g(),a,x);
local( f (),x);
if f (x) < f (x*) do
x = x*;
end if;
end for;
end grasp;

Podsumowanie
• W przypadku zadań programowania nieliniowego
można dla ułatwienia znalezienia jak najlepszego
rozwiązania zastosować metody relaksacji
Lagrange’a, wykorzystać warunki Kuhna-Tuckera
lub rozwiązać zadanie dualne
• W wielu przypadkach jedyną metodą rozwiązania zadań
dyskretnych o dużym rozmiarze przestrzeni rozwiązań
jest zastosowanie metod obliczeń inteligentnych
• Ważne jest sposób kodowania zadania dla danej
metody inteligentnej
• Nie w każdym przypadku metody obliczeń
inteligentnych sprawdzają się

Dodatkowa literatura
• M. Pióro, D. Medhi, „Routing, Flow, and Capacity Design in
Communication and Computer Networks”, Morgan Kaufman
Publishers 2004 (rozdział 5)
• W. Findeisen, J. Szymanowski, A. Wierzbicki, „Teoria i metody
obliczeniowe optymalizacji”, PWN, Warszawa 1980
• A. Stachurski, A. Wierzbicki, „Podstawy optymalizacji”, Oficyna
Wydawnicza Politechniki Warszawskiej, Warszawa 1999
• G. Di Caro, M. Dorigo, „AntNet: Distributed Stigmergetic Control
for Communications Networks”, Journal of Articial Intelligence
Research 9 (1998) 317-365,
http://www.jair.org/media/530/live-530-1742-jair.pdf
• M. Dorigo, G. Di Caro, „The Ant Colony Optimization Meta-
Heuristic”, in New Ideas in Optimization,
http://citeseer.ist.psu.edu/update/239263
• M. Resende, „Greedy Randomized Adaptive Search Procedures
(GRASP)”, in Encyclopedia of Optimization, Kluwer Academic Press,
1999,
http://citeseer.ist.psu.edu/update/517725
• www.wikipedia.org
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
Wyszukiwarka
Podobne podstrony:
ZMPST Metody optymalizacji 1
MATEMATYCZNE METODY OPTYMALIZACJI
A4?le i metody optymalizacji globalnej
Metody optymalizacji, Księgozbiór, Studia, Metody numeryczne
Metody optymalizacji N1 LAB 11 2
MATEMATYCZNE METODY OPTYMALIZACJI
ZagadnieniaMO, Studia, Studia sem VI, Metody optymalizacji
Raport, Edukacja, studia, Semestr VII, Ewolucyjne Metody Optymalizacji
sprawozdanie3 mo ok, Studia, Studia sem VI, Metody optymalizacji
91062851 Metody Optymalizacji Calosc Wykladow PDF
pytania, metody optymalizacji, Głupie pytanie
metody optymalizacji calosc wykladow pdf slajdy 2 grudnia 2010
Metody optymalizacji transportu laboratorium 1
Metody optymalizacji zużycia paliwa w samochodzie osobowym
MATEMATYCZNE METODY OPTYMALIZACJI
Metody optymalizacji transportu laboratorium 1
więcej podobnych podstron