
MIARY EFEKTYWNOŚCI RUCHU NA
SKRZYŻOWANIU Z SYGNALIZACJĄ
AGNIESZKA KOPROWSKA
PATRYK PAWELCZYK
MIARY EFEKTYWNOŚCI
Efektywność funkcjonowania skrzyżowania, w tym jakość warunków ruchu są oceniane
przy użyciu miar efektywności, które można podzielić na 3 grupy:
1.
Związane z przepustowością:
przepustowość C [E/h], rezerwa przepustowości ∆C [E/h],
stopień obciążenia X = Q/C,
prawdopodobieństwo rozładowania przeciążenia (przejazdu pojazdów dojeżdżających);
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
MIARY EFEKTYWNOŚCI
2.
Związane z tworzeniem się kolejek pojazdów:
średnie przeciętne straty czasu [s/E], [s/P],
średnie straty zatrzymania [s/E],
poziom swobody ruchu PSR (miernik jakościowy),
liczba zatrzymań [z],
kolejka pojazdów na początku sygnału zielonego (na końcu sygnału czerwonego) [P],
średnia długość kolejki [P],
maksymalna długość kolejki [P],
maksymalna kolejka w okresie przeciążenia [P],
średnie straty czasu pieszych [s/PS],
straty czasu przypadające na osobę [s/O],
łączne straty czasu wynikające z zatrzymań [E/h];
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
MIARY EFEKTYWNOŚCI
3.
Związane z oddziaływaniem na środowisko:
zużycie paliwa [g/100 m], [1/100 km],
emisję CO
2
, CO, NO
x
, CH [g/stop], [g/100 m],
koszt emisji.
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
MIARY EFEKTYWNOŚCI
Wymienione miary mogą być obliczane dla: pasów ruchu, wlotu oraz całego skrzyżowania
i wykorzystywane do klasyfikacji warunków ruchu według poziomów swobody (PSR). Straty
czasu, liczba zatrzymań i długość kolejek pojazdów są miarami bezpośrednio odczuwalnymi
przez kierowców.
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
MIARY EFEKTYWNOŚCI
Strata czasu jest to dodatkowy czas potrzebny na przejechanie skrzyżowania z
sygnalizacją świetlną w porównaniu z czasem przejazdu przez skrzyżowanie bez zakłóceń
(bez zatrzymania na wlocie). W ocenie warunków ruchu na skrzyżowaniu z sygnalizacją są
stosowane średnie ogólne straty zatrzymania pojazdu w kolejce, a także tzw. straty
geometryczne związane z wydłużeniem drogi przejazdu przez skrzyżowanie (np. na
rondach).
Liczba zatrzymań jako przypadająca średnio na pojazd lub łączna wszystkich pojazdów, z
uwzględnieniem wielokrotnych zatrzymań pojazdów, a udział pojazdów zatrzymanych w
ogólnej liczbie pojazdów przejeżdżających skrzyżowanie dobrze charakteryzują płynność
ruchu.
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
MIARY EFEKTYWNOŚCI
Długość kolejki wyrażana jest liczbą pojazdów o najczęściej jej wielkość rejestrowana jest
na początku (kolejka maksymalna) i końcu (kolejka pozostająca) sygnału zielonego. Jest
istotna przy wymiarowaniu stref akumulacji dodatkowych pasów ruchu oraz przy
projektowaniu koordynacji sygnalizacji. Kolejki pozostające (świadczące o przeciążeniu
wlotu) są ważną miarą w ocenie jakości sterowania.
Stopień obciążenia X należy do podstawowych parametrów w estymatorach strat czasu,
liczby zatrzymań i długości kolejek. Sprawność skrzyżowania pogarsza się gwałtownie, gdy
stopień obciążenia X przekracza X ≥ 0,7 a zwłaszcza gdy X ≥ 0,9.
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
MIARY EFEKTYWNOŚCI
W analizie warunków ruchu istotną rolę odgrywa okres analizy t
a
, który powinien
cechować się stałym dopływem pojazdów. Typowe okresy analizy stosowane w analizach
(m.in. HCM i HBS) to t
a
= 0,25 h lub t
a
= 1 h.
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
STRATY CZASU
Podstawową miarą w ocenie warunków ruchu są straty czasu pojazdów. Do głównych
przyczyn powstania strat czasu i zatrzymań pojazdów strumienia priorytetowego na
skrzyżowaniu z sygnalizacją należą:
okresy nadawania sygnału czerwonego i czasy międzyzielone, które powodują
przerwy w ruchu pojazdów niezależnie od jego charakteru,
losowość dopływów pojazdów strumienia do wlotu,
przeciążenie (pojawiające się zazwyczaj w okresie szczytowego ruchu), gdy natężenie
dopływających pojazdów przekracza przepustowość przez kilka cykli sygnalizacji lub dłużej
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
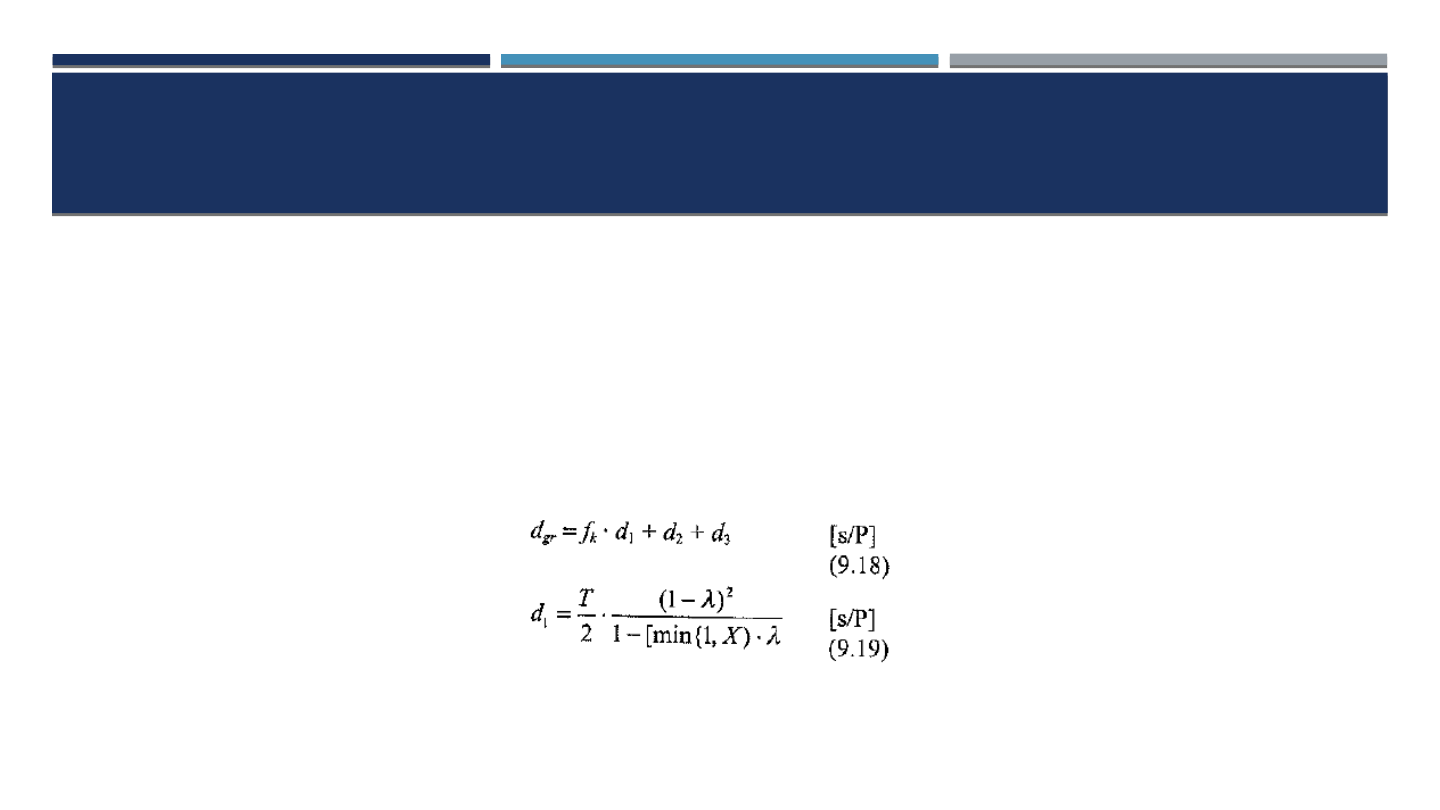
STRATY CZASU
Pierwsza przyczyna (o stałym charakterze) ujmowana jest w członie deterministycznym
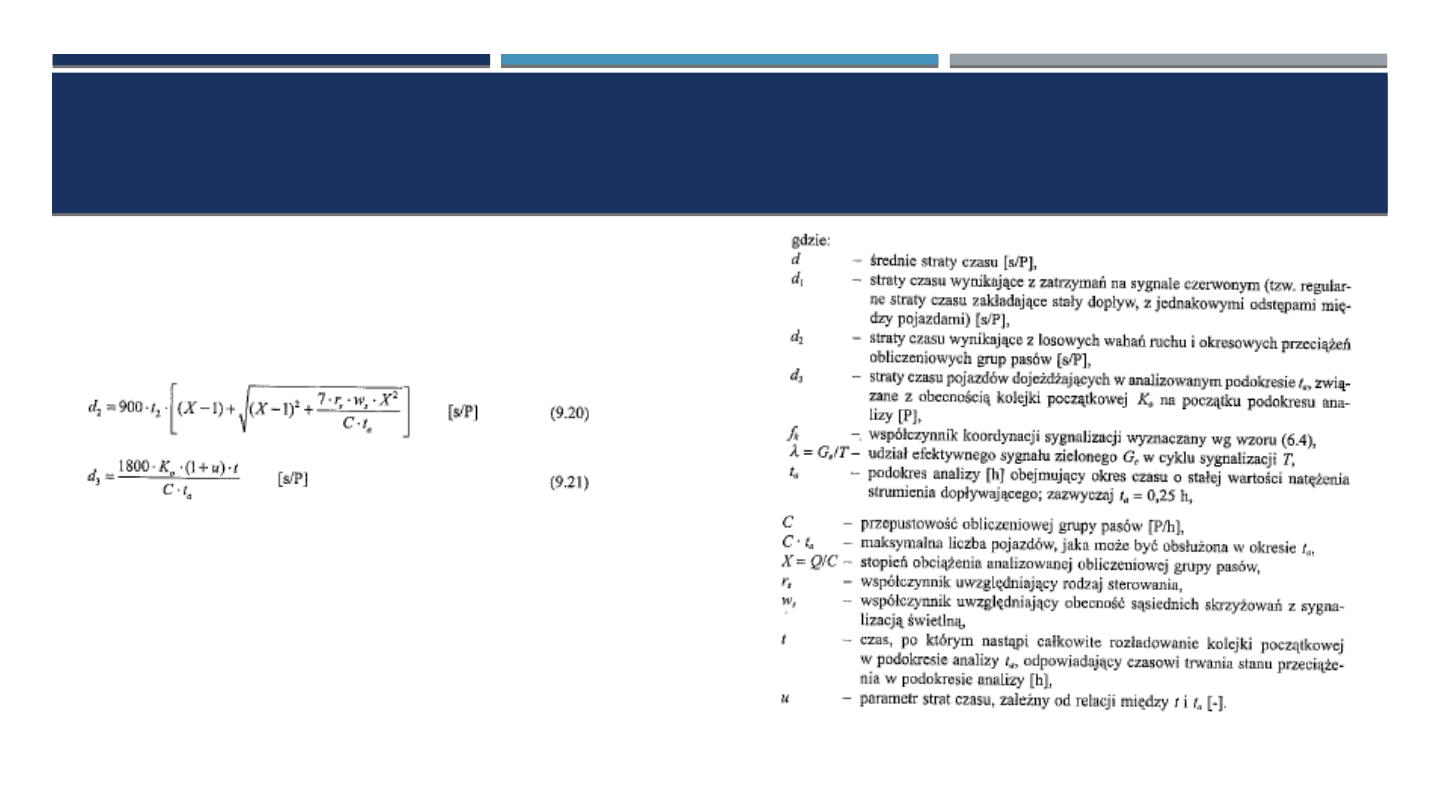
wzoru na obliczanie strat czasu (9.19), zaś dwie następne w członie losowym (9.20).
Średnie straty czasu przypadające na pojazd w obliczeniowej grupie pasów w przyjętym
okresie analizy t
a
(o stałym natężeniu napływu) szacuje się według następujących wzorów:
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
STRATY CZASU
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
STRATY CZASU
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
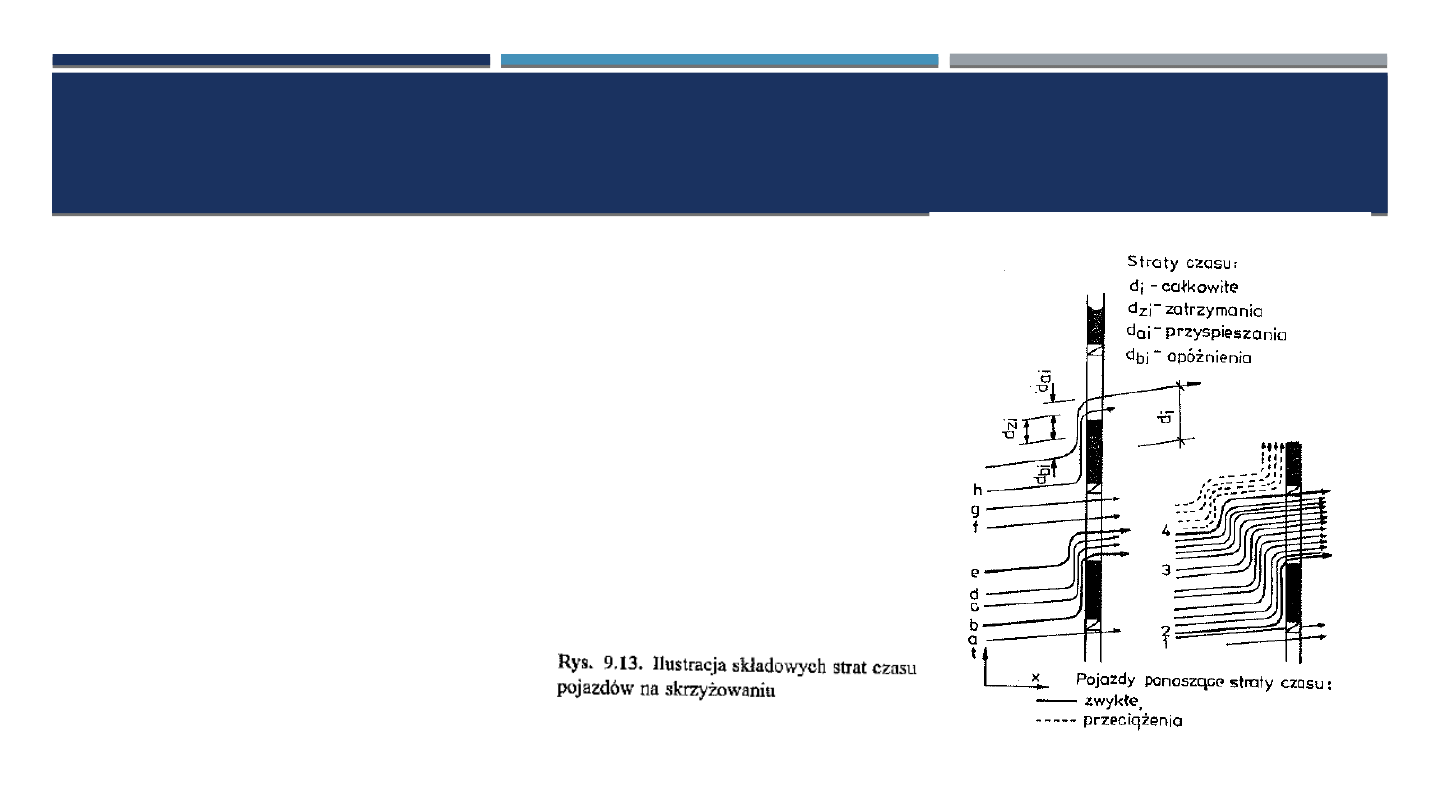
Człon deterministyczny jest obliczany przy
założeniu regularnych przybyć pojazdów (stałe
odstępy czasowe) i jest proporcjonalny do długości
sygnału czerwonego. Ich elementy pokazuje rys.
9.13.
STRATY CZASU
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
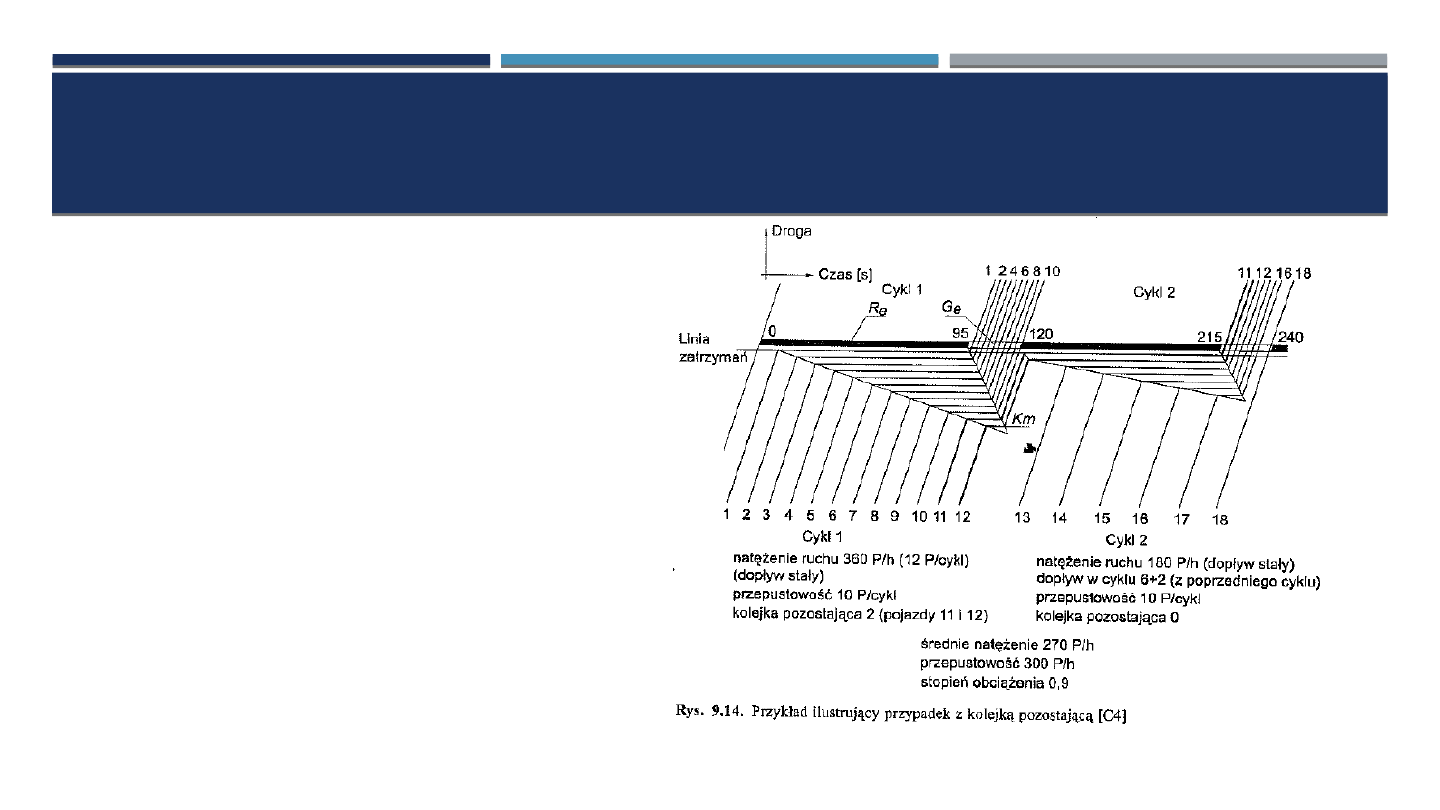
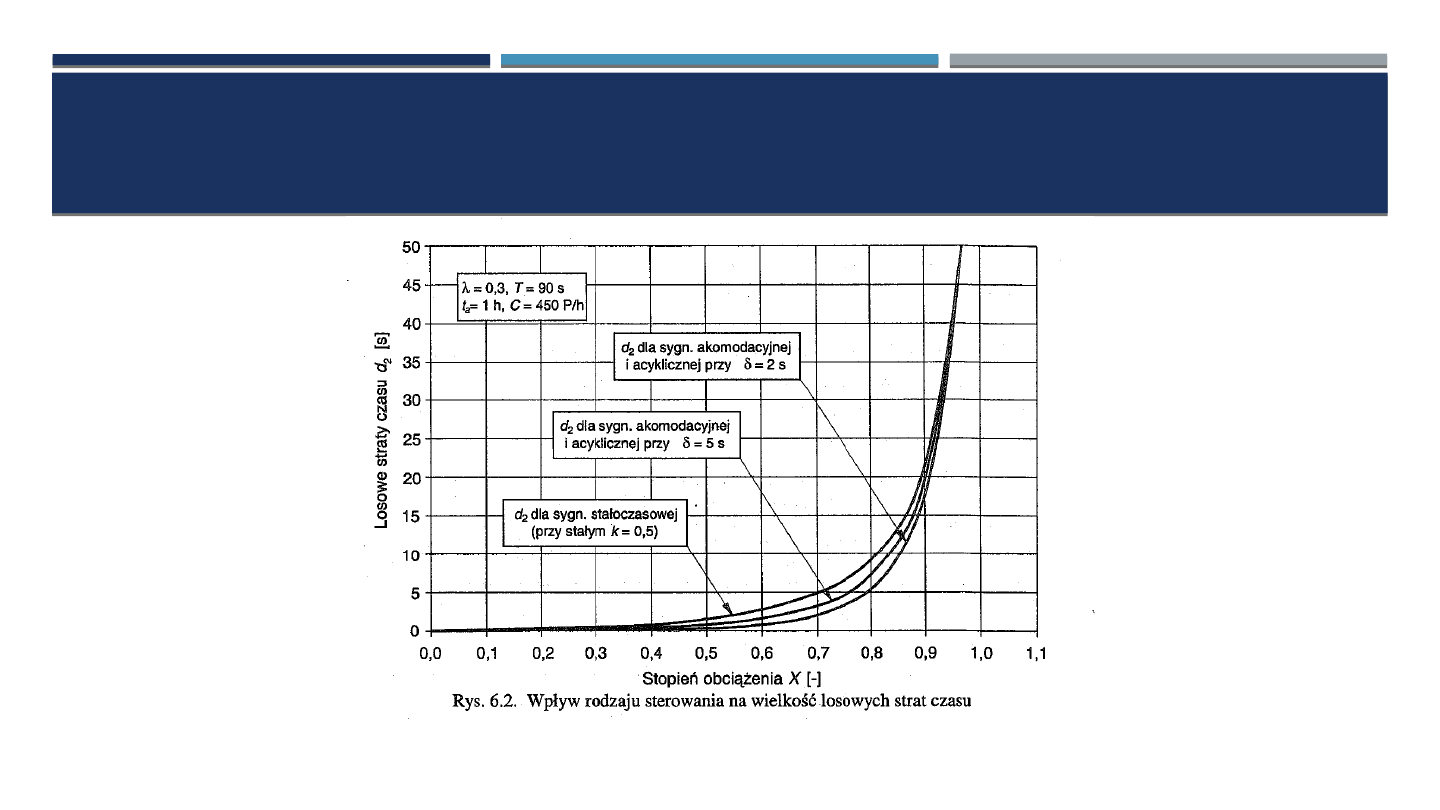
Człon losowy determinowany jest
losowością dojazdów pojazdów, a
zwłaszcza przeciążeniem cyklu,
reprezentowanym przez kolejkę
pozostającą, tzn. średnią liczbą pojazdów
pozostających na końcu sygnału zielonego.
Losowość przybyć pojazdów na wlot
skrzyżowania powoduje, iż nawet w
przypadku, gdy średnie natężenie
strumienia dopływającego jest w okresie
analizy mniejsze od przepustowości (X <
1,0), występuje pewna liczba cykli
przeciążonych. Przypadek ten ilustruje
rysunek 9.14 który pokazuje w układzie
droga-czas hipotetyczne trajektorie
pojazdów przybywających w regularnych
odstępach w ciągu 2 cykli sygnalizacji.
STRATY CZASU
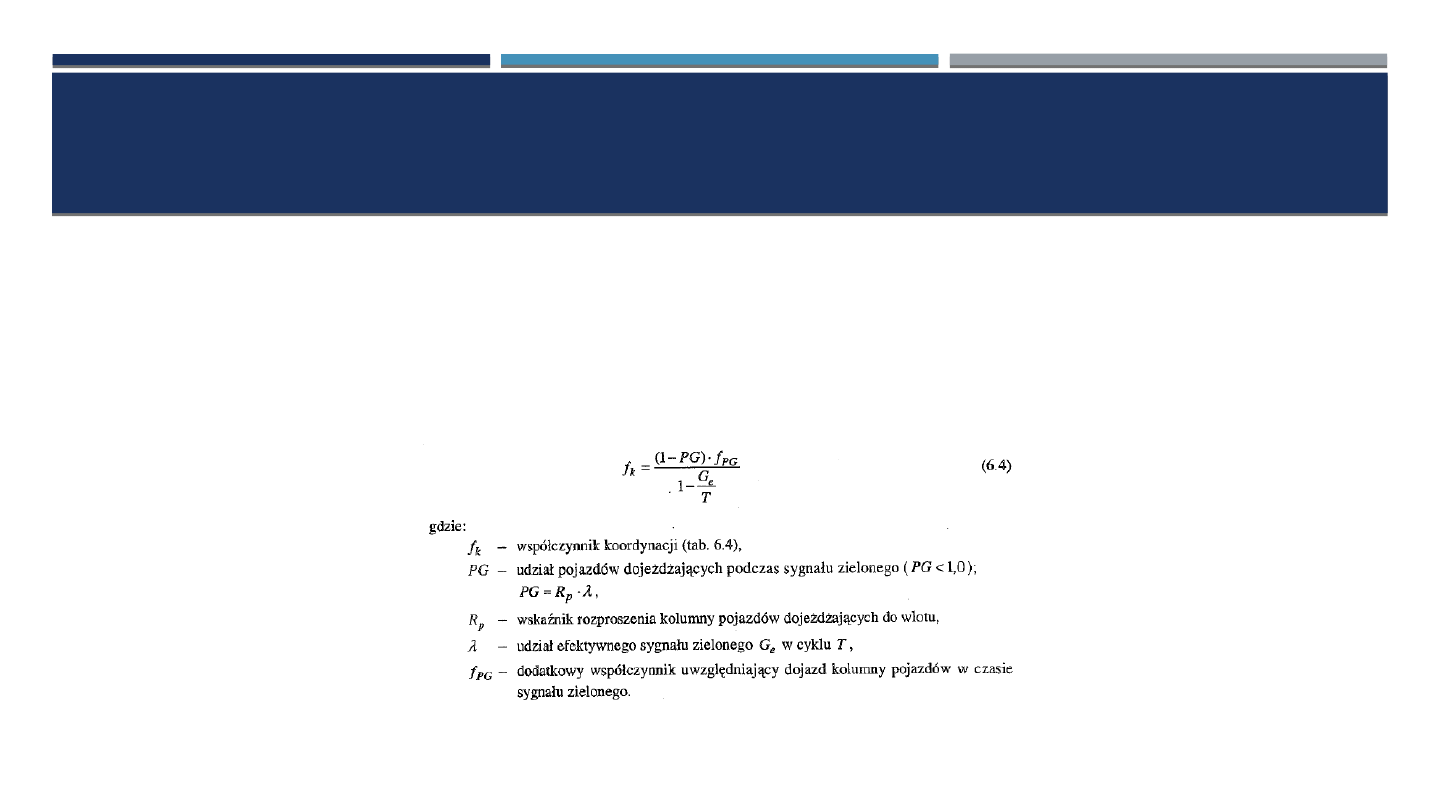
Zgodnie z wytycznymi wpływ rodzaju sterowania na straty czasu nie jest duży. Analizę
strat czasu dla sygnalizacji akomodacyjnej można prowadzić jak dla sygnalizacji stałoczasowej
według ww. wzorów nie uwzględniając strat czasu wynikających z koordynacji. Wpływ
koordynacji sygnalizacji świetlnych, powoduje regularne dojazdy pojazdów w kolumnach,
uwzględnia się w obliczeniach strat czasu przez zastosowanie współczynnika koordynacji f
k
korygującego pierwszy składnik strat czasu d
1
.
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ, Warszawa 2008 oraz Metody
obliczania przepustowości skrzyżowań z sygnalizacją świetlną (autorzy: J. Chodur, M. Tracz i
inni) GDDKiA, Warszawa 2004.
STRATY CZASU
Źródło: Metody obliczania przepustowości skrzyżowań z sygnalizacją świetlną (autorzy: J.
Chodur, M. Tracz i inni) GDDKiA, Warszawa 2004.
STRATY CZASU
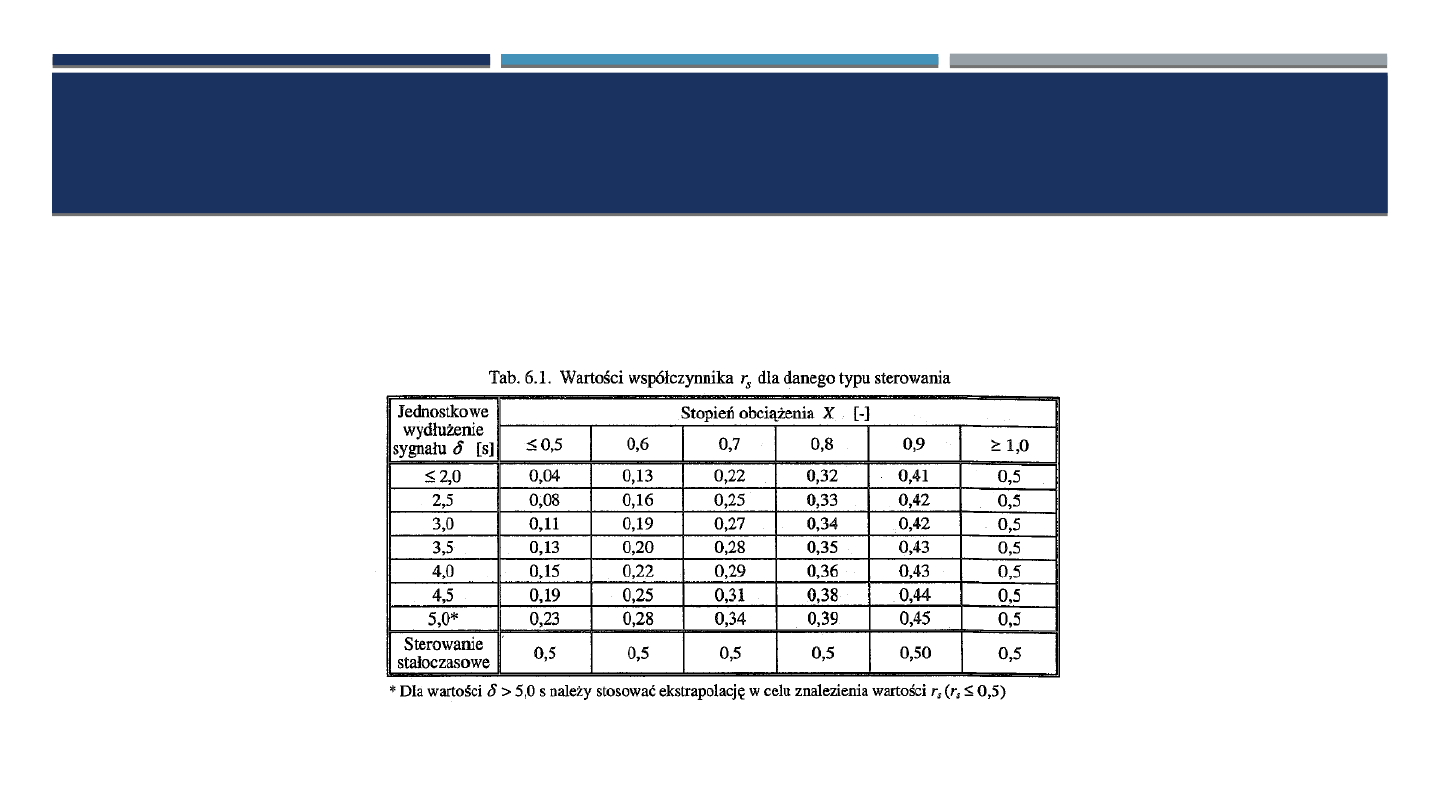
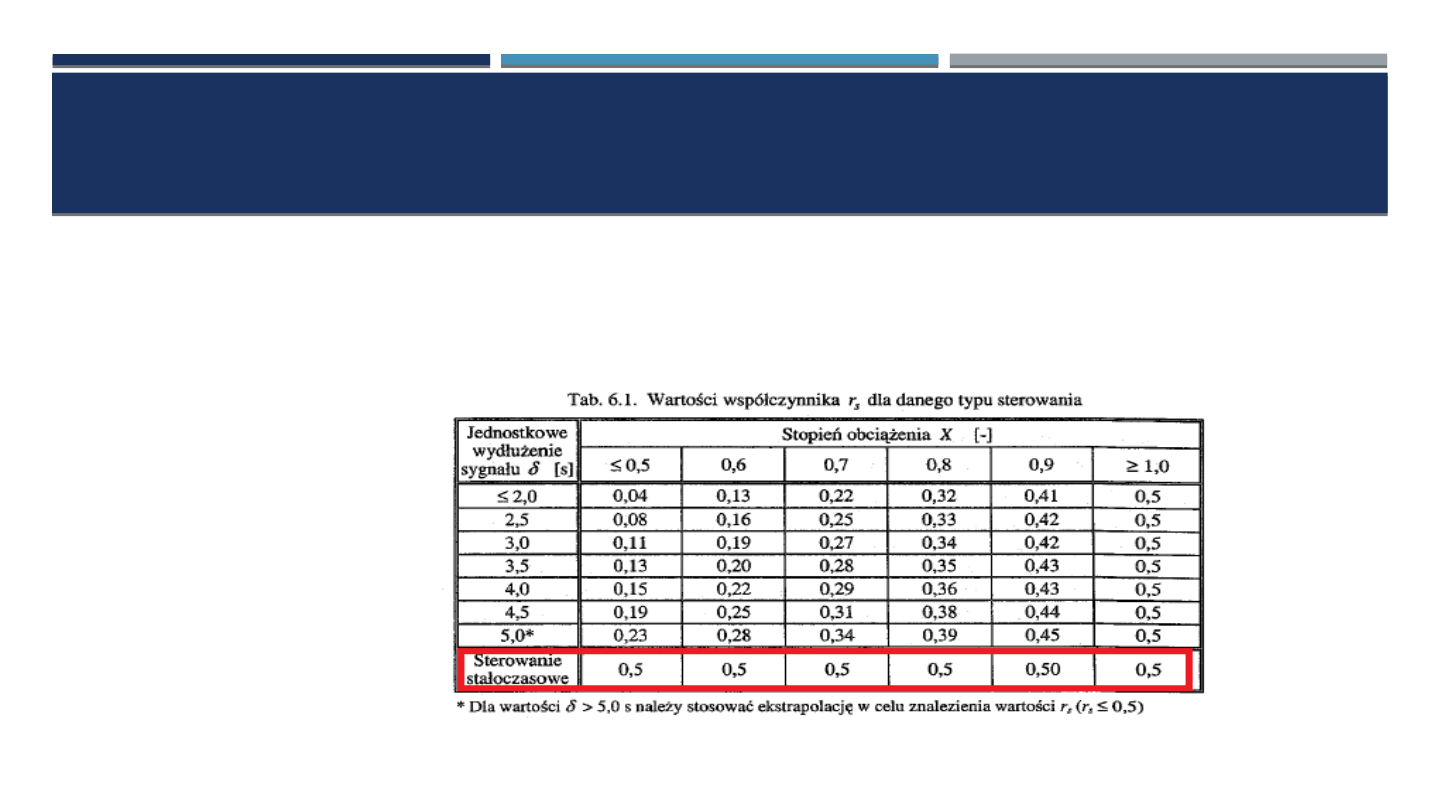
Wartość współczynnika r
s
zależy od rodzaju sterowania. W przypadku sygnalizacji
cyklicznej stałoczasowej jego wartość jest stała i wynosi 0,5 niezależnie od X [-]. Dla
sygnalizacji akomodacyjnej lub acyklicznej wielkość r
s
uzależniona jest od jednostkowego
wydłużenia sygnału zielonego δ i stopnia obciążenia X.
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ, Warszawa 2008 oraz Metody
obliczania przepustowości skrzyżowań z sygnalizacją świetlną (autorzy: J. Chodur, M. Tracz i
inni) GDDKiA, Warszawa 2004.
STRATY CZASU
Źródło: Metody obliczania przepustowości skrzyżowań z sygnalizacją świetlną (autorzy: J.
Chodur, M. Tracz i inni) GDDKiA, Warszawa 2004.
STRATY CZASU
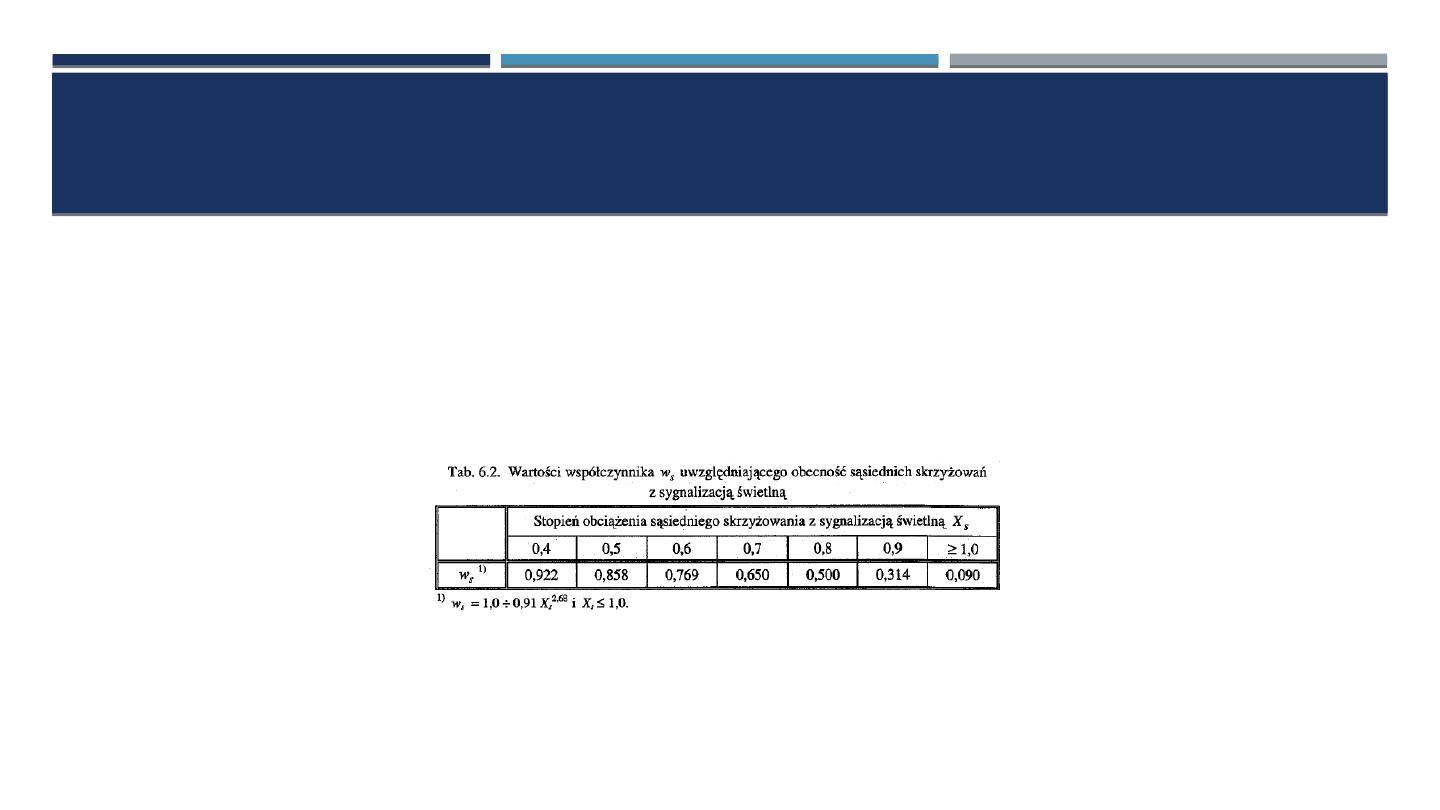
Wartość współczynnika w
s
zależą od usytuowania skrzyżowania w sieci ulic (odosobnione
lub w pobliżu innej sygnalizacji).
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ, Warszawa 2008 oraz Metody
obliczania przepustowości skrzyżowań z sygnalizacją świetlną (autorzy: J. Chodur, M. Tracz i
inni) GDDKiA, Warszawa 2004.
STRATY CZASU
Straty czasu obliczone według wzorów (9.19) i (9.20) są średnimi ogólnymi stratami czasu
obejmującymi straty postoju w kolejce (zatrzymania) oraz straty zwalniania i przyspieszania
przy dojeździe (rys. 9.13) i opuszczaniu kolejki. Łączne straty czasu wszystkich pojazdów w
obliczeniowej grupie pasów w okresie analizy t
a
[h] można wyliczyć, mnożąc jednostkowe
straty d (9.18) przez liczbę pojazdów w okresie t
a
.
Źródło: Inżynieria ruchu drogowego, Teoria i praktyka, WKiŁ,
Warszawa 2008
ZADANIE 1
Zad 1
Obliczyć straty czasu wynikające z losowych wahań ruchu i okresowych przeciążeń
obliczeniowych grup pasów, zakładając, że skrzyżowanie jest ze sterowaniem
stałoczasowym, stopień obciążenia sąsiedniego skrzyżowania z sygnalizacją świetlną X
s
wynosi 0,5 [-], udział efektywnego sygnału zielonego w cyklu sygnalizacji wynosi 0,7, typ
dopływu pojazdów 3. Przepustowość obliczeniowa grupy pasów wynosi 769 P/h, podokres
analizy wynosi 1 h. Natężenie ruchu wynosi 593 P/h oraz cykl sygnalizacji wynosi 90 s.
ZADANIE 1
Dane:
rs=0,5 tab. 6.1 Metody obliczania przepustowości skrzyżowań z sygnalizacją świetlną
(autorzy: J. Chodur, M. Tracz i inni) GDDKiA, Warszawa 2004.
X
s
=0,5
Źródło: Metody obliczania przepustowości skrzyżowań z sygnalizacją świetlną
(autorzy: J. Chodur, M. Tracz i inni) GDDKiA, Warszawa 2004.
ZADANIE 1
w
s
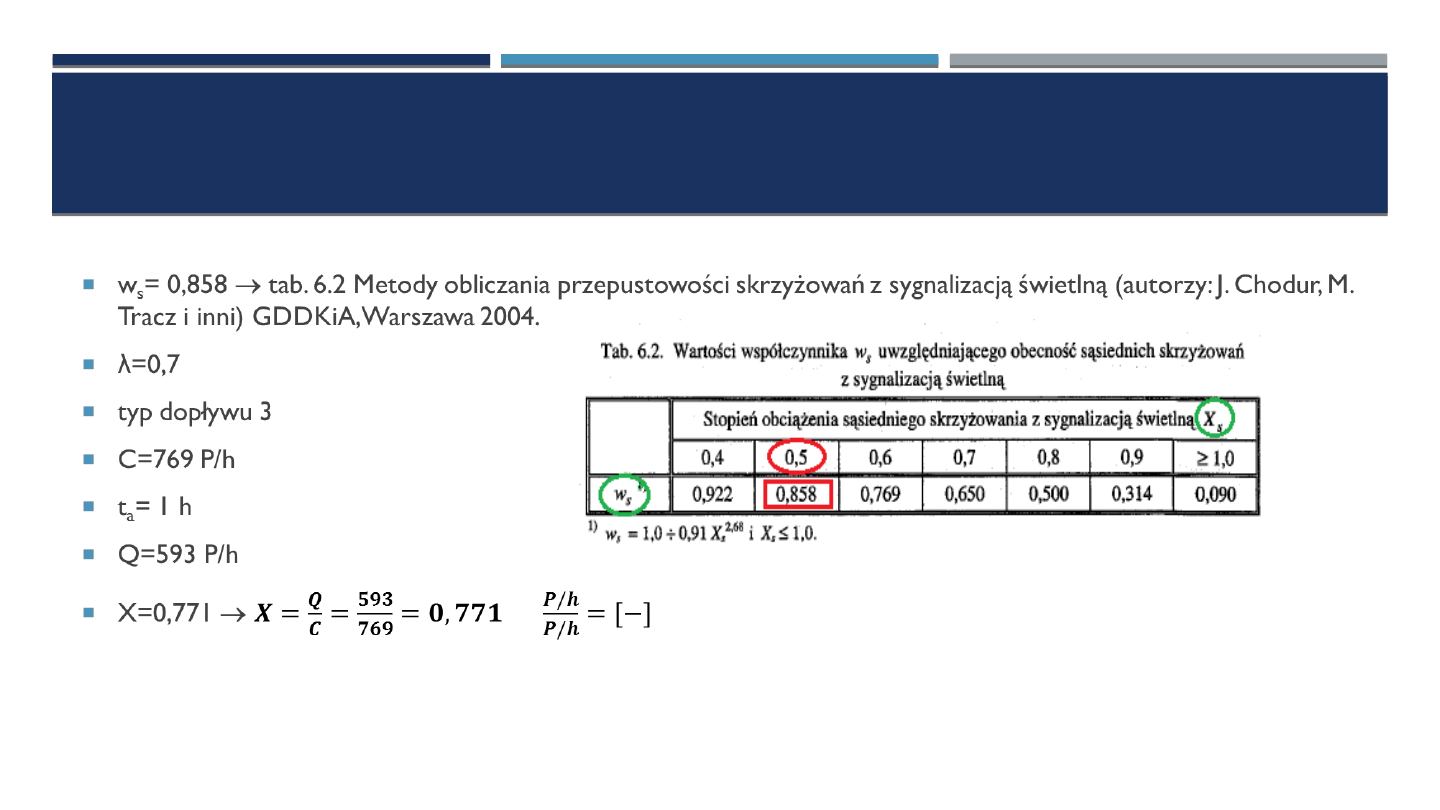
= 0,858 tab. 6.2 Metody obliczania przepustowości skrzyżowań z sygnalizacją świetlną
(autorzy: J. Chodur, M. Tracz i inni) GDDKiA, Warszawa 2004.
λ=0,7
typ dopływu 3
C=769 P/h
t
a
= 1 h
Q=593 P/h
X=0,771
Źródło: Metody obliczania przepustowości skrzyżowań z sygnalizacją świetlną
(autorzy: J. Chodur, M. Tracz i inni) GDDKiA, Warszawa 2004.
ZADANIE 1
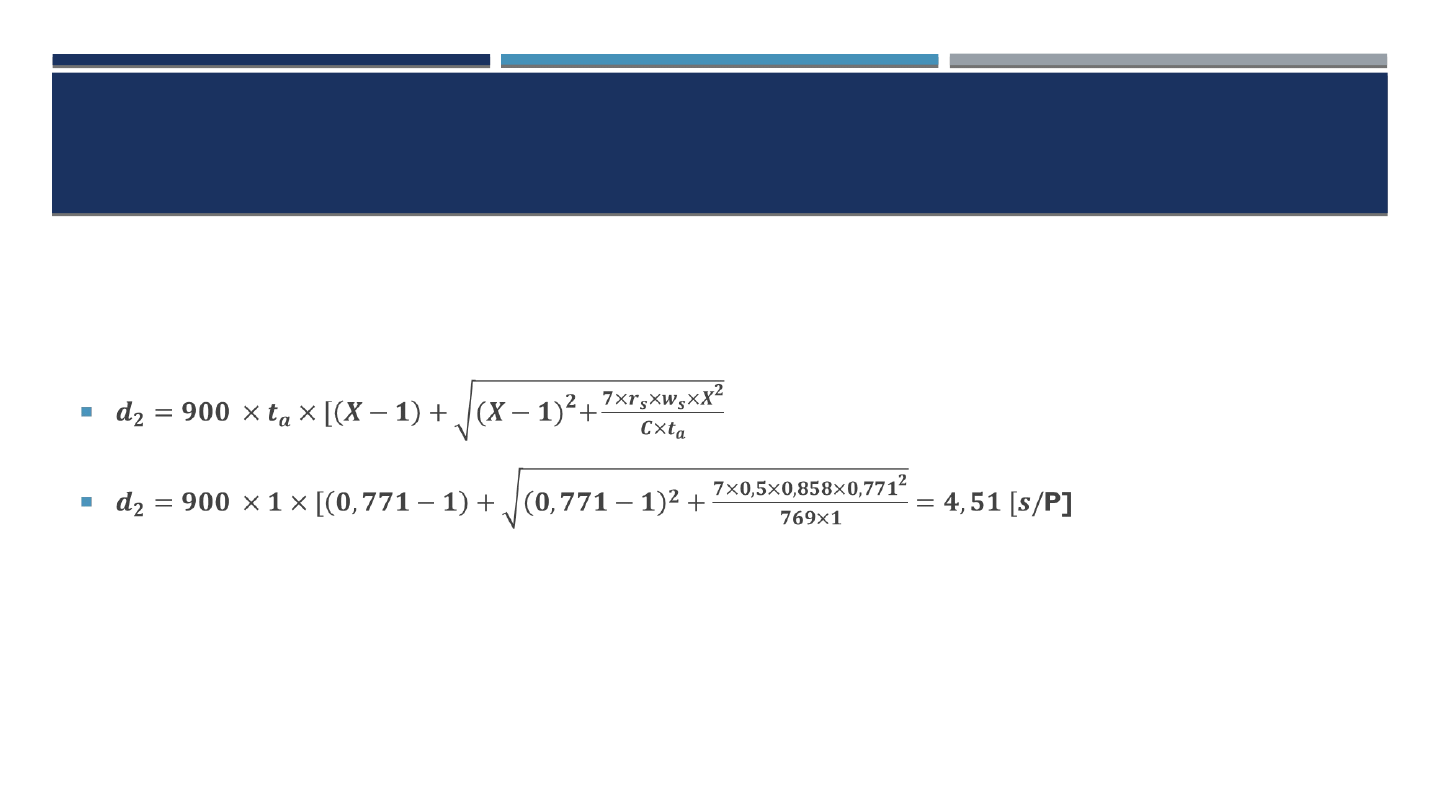
P]
ZADANIE 2
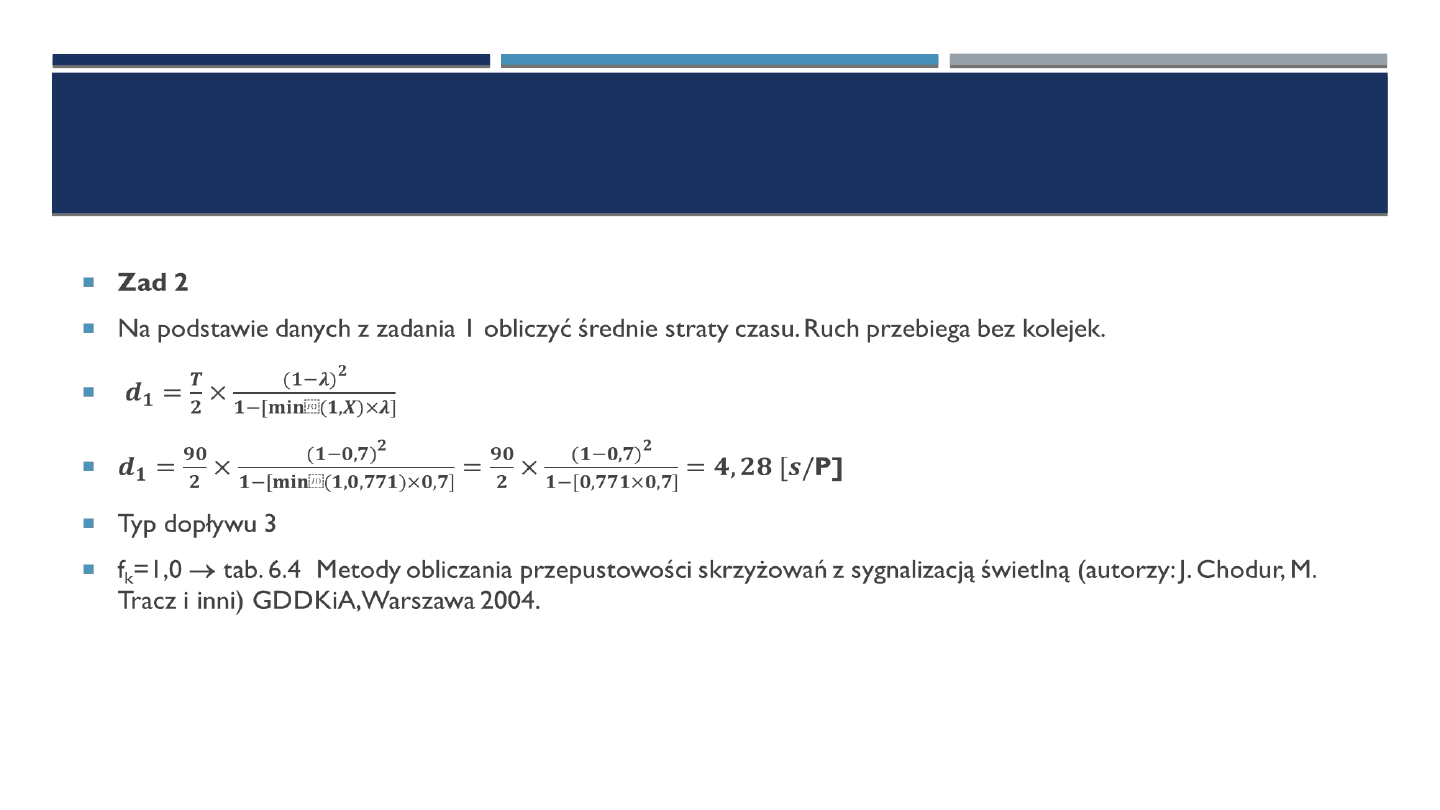
Zad 2
Na podstawie danych z zadania 1 obliczyć średnie straty czasu. Ruch przebiega bez
kolejek.
P]
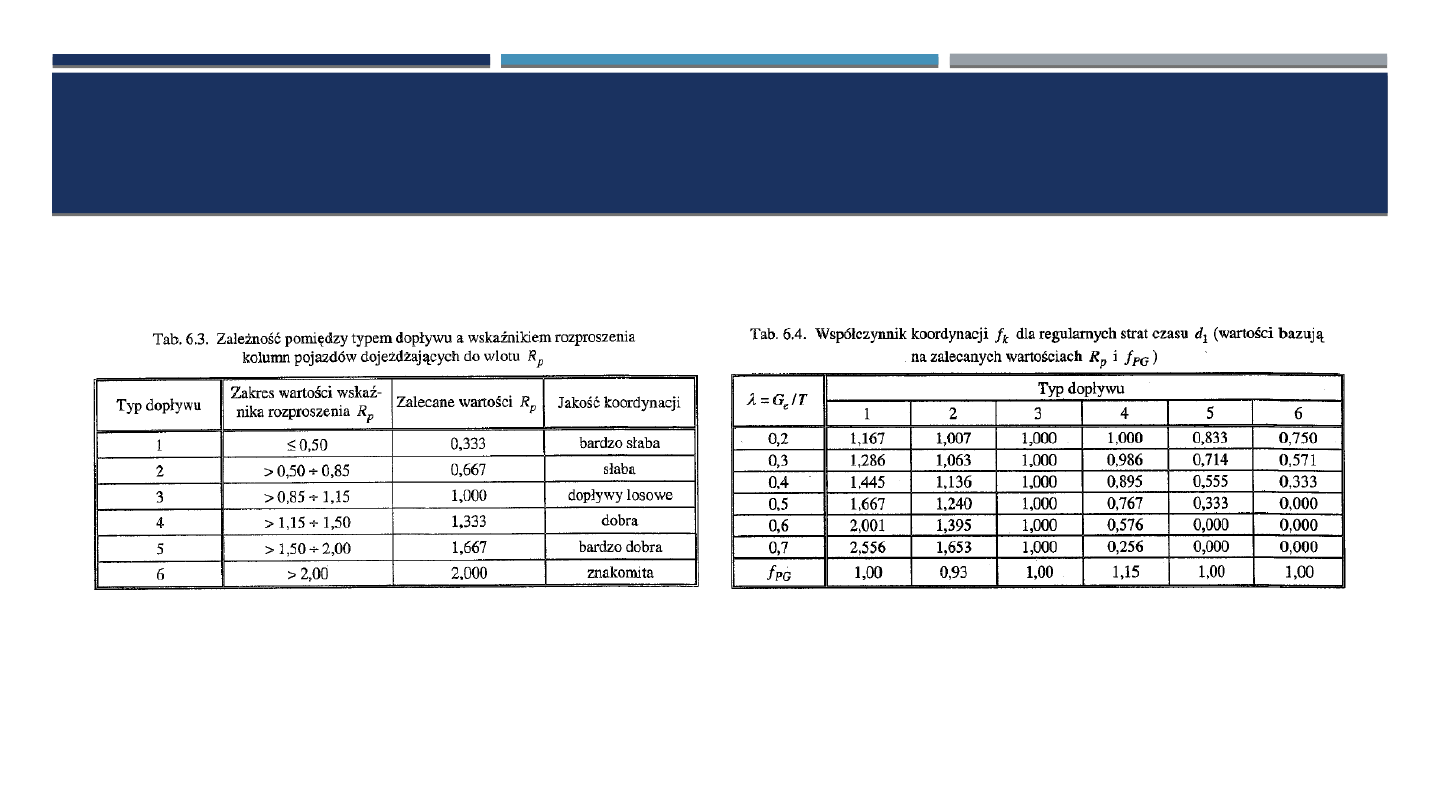
Typ dopływu 3
f
k
=1,0 tab. 6.4 Metody obliczania przepustowości skrzyżowań z sygnalizacją świetlną
(autorzy: J. Chodur, M. Tracz i inni) GDDKiA, Warszawa 2004.
ZADANIE 2
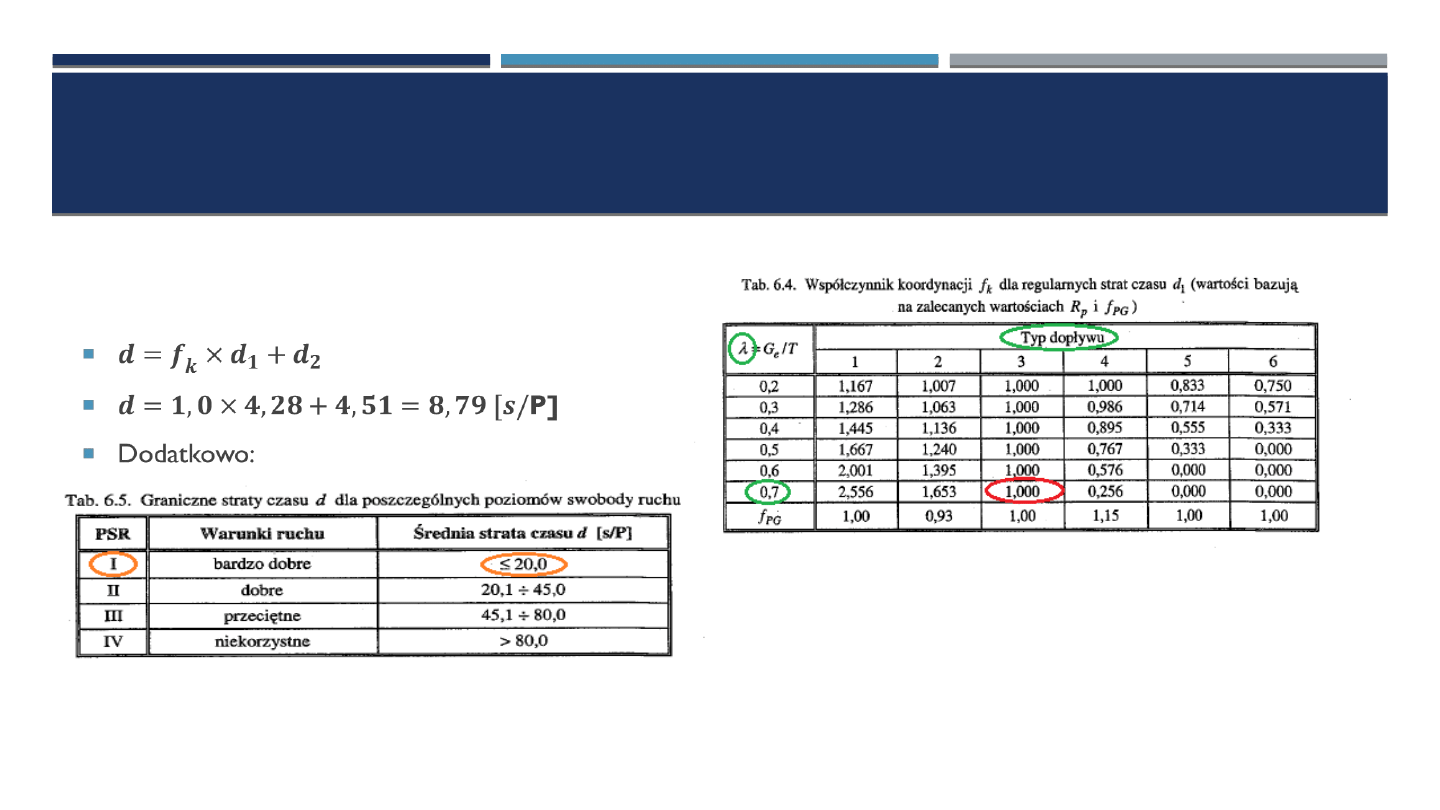
P]
Dodatkowo:
Źródło: Metody obliczania przepustowości skrzyżowań z sygnalizacją świetlną
(autorzy: J. Chodur, M. Tracz i inni) GDDKiA, Warszawa 2004.
ZADANIE 3
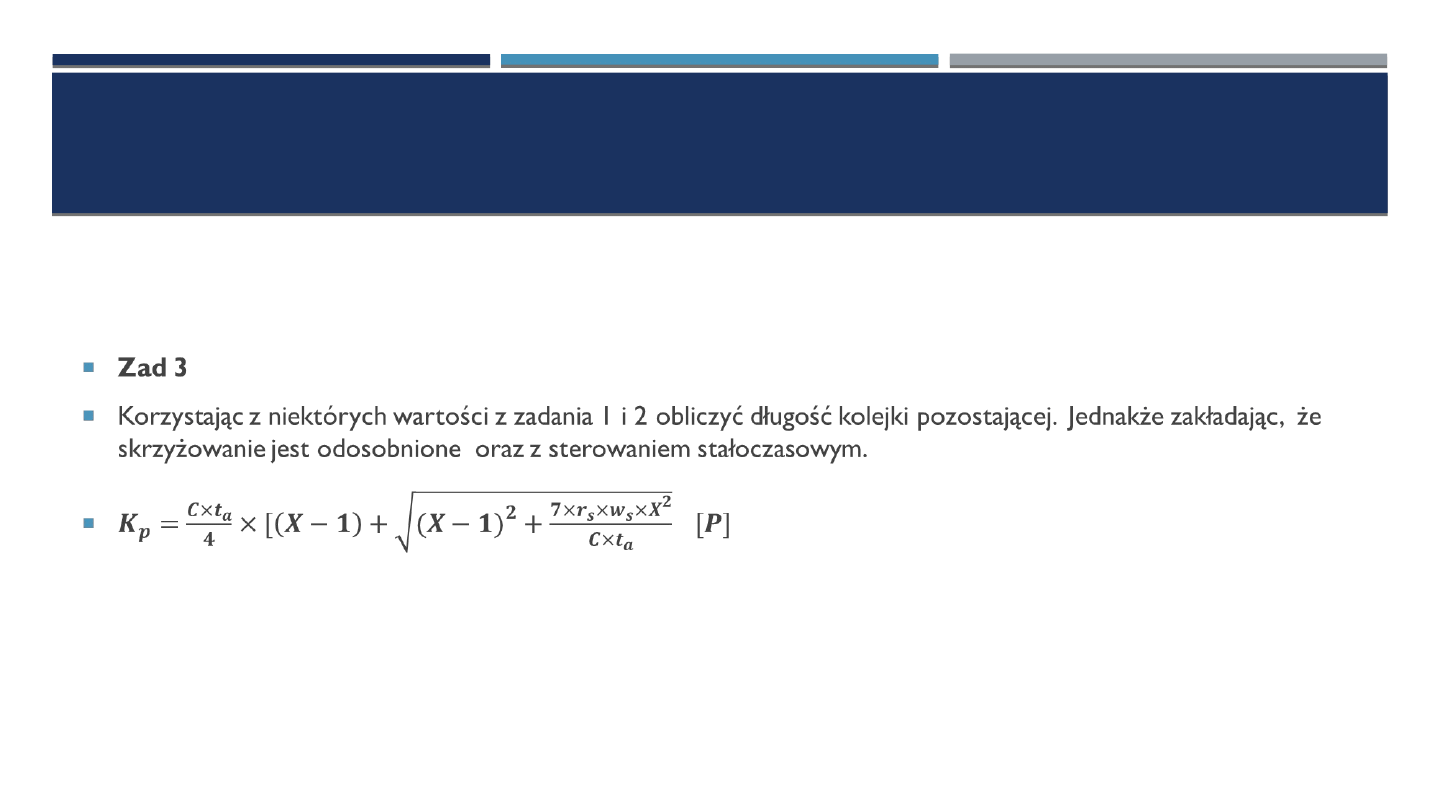
Zad 3
Korzystając z niektórych wartości z zadania 1 i 2 obliczyć długość kolejki pozostającej.
Jednakże zakładając, że skrzyżowanie jest odosobnione oraz z sterowaniem
stałoczasowym.
Źródło: Metody obliczania przepustowości skrzyżowań z sygnalizacją świetlną
(autorzy: J. Chodur, M. Tracz i inni) GDDKiA, Warszawa 2004.
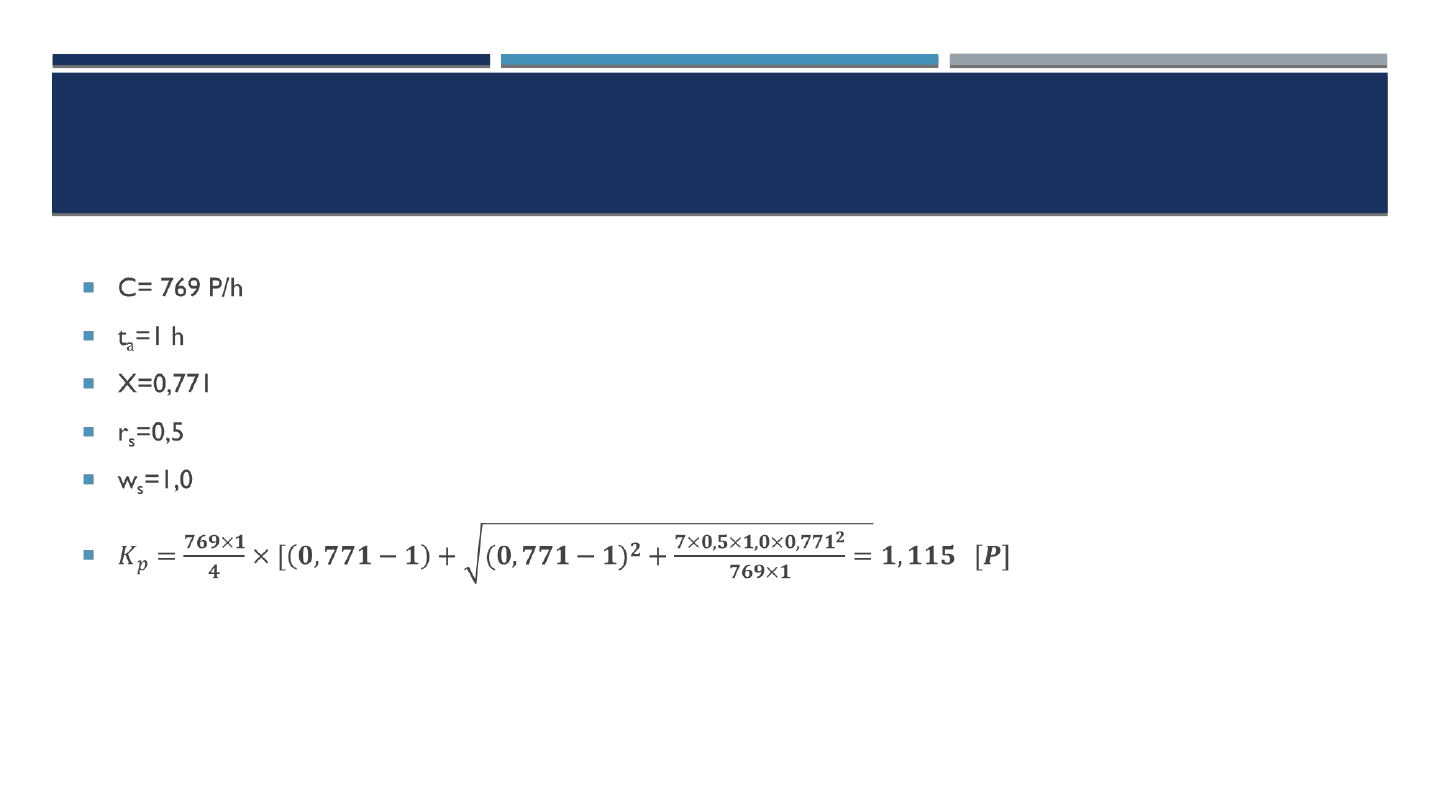
ZADANIE 3
C= 769 P/h
t
a
=1 h
X=0,771
r
s
=0,5
w
s
=1,0
Dziękujemy za uwagę
Agnieszka Koprowska
Patryk Pawelczyk
Document Outline
- Slide 1
- Miary efektywności
- Miary efektywności
- Miary efektywności
- Miary efektywności
- Miary efektywności
- Miary efektywności
- Miary efektywności
- Straty czasu
- Straty czasu
- Straty czasu
- Straty czasu
- Straty czasu
- Straty czasu
- Straty czasu
- Straty czasu
- Straty czasu
- Straty czasu
- Straty czasu
- Zadanie 1
- Zadanie 1
- Zadanie 1
- Zadanie 1
- Zadanie 2
- Zadanie 2
- Zadanie 3
- Zadanie 3
Wyszukiwarka
Podobne podstrony:
Miary efektywności ruchu na skrzyżowaniu z sygnalizacją świetlną zadania
Miary efektywnosci RTS3 id 2984 Nieznany
C++ 50 efektywnych sposobów na udoskonalenie Twoich programów
IR 06 E Organizacja Ruchu Zasady stosowania sygnalizacji świetlnej 2009 [tryb zgodności]
Efekty kształcenia na kierunku FINANSE I RACHUNKOWOŚĆ I stopień
76 262202 analityk ruchu na stronach internetowych
Technologia ciekłokrystaliczna pozwala na transmisję sygnału, materiały liceum i studia, Informatyka
Wpływ niedoboru ruchu na organizm ludzki, kosmetologia, ogólne
Wpływ ruchu na organizm człowieka
Ochrona przed hałasem, Ucho, Ucho- przetwornik mechano- elektryczny ( na wejściu do ucha en mechanic
konspekty, Porządek i bezp.ruchu na drogach, PLAN - KONSPEKT ZAJĘĆ
wpływ ruchu na rozwój psychiczny człowieka, Dokumenty(2)
miary-efektywnosci-promocji-sprzedazy
Wpływ ruchu na człowieka
Miary efektywnosci RTS2 id 2984 Nieznany
Wykonywanie różnych siłowych form ruchu na przyrządach., AWF, Inne
więcej podobnych podstron