Kret Agnieszka
gr7; 13.12.2011r
Kowalski Kamil
Kozieł Bartosz
Ćwiczenie Nr 4 – „Sporządzanie wykresów zapotrzebowania mocy i momentu zespołu napędowego”
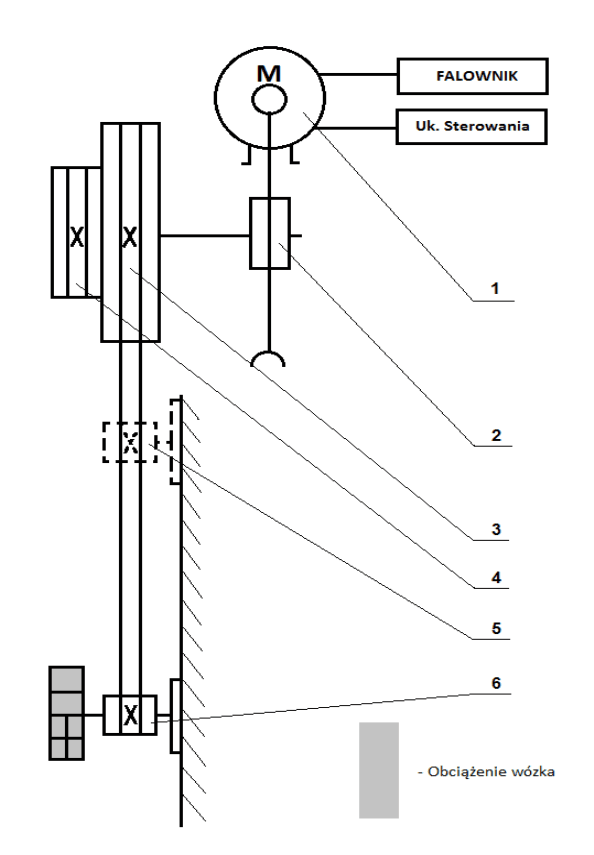
Schemat stanowiska
1.
Silnik
2.
Przekładnia Ślimakowa(i=10,23) 3.
Koło linowo – napędowe Φnd=0,125
4.
Koło linowo – napędowe Φnd=0,075
5.
Wózek nieobciążony wraz z kołem linowym Φnw=0,063
6.
Wózek obciążony wraz z kołem linowym Φnw=0,063
Zadany wykres prędkości jazdy wózka w funkcji drogi v(s)
V[m/s]
0,12
v[m/s] s[m]
0,10
0,00 0,00
0,11 0,20
0,08
0,11 0,55
0,06
v(s)
0,05 0,60
0,04
0,05 0,80
0,02
0,00 1,00
0,00
0,00
0,20
0,40
0,60
0,80
1,00
1,20 s[m]
Tabela z parametrami pracy napędu.
Końcowa
Końcowa
Końcowa
Końcowa
prędkość
prędkość
prędkość
prędkość
Końcowa
kątowa
kątowa
obrotowa
obrotowa
prędkość
silnika
silnika
silnika
silnika
jazdy
Czas
podczas
podczas
podczas
podczas
Etap Pracy
wózka
trwania
etapu
etapu
etapu
etapu
podczas
etapu
pracy –
pracy –
pracy –
pracy –
etapu
pracy
koło
koło
koło
koło
pracy
napędowe
napędowe
napędowe
napędowe
Φnd=0,125 Φnd=0,075 Φnd=0,125 Φnd=0,075
[m]
[m]
[m]
[m]
i
v
’
’
’
’
’
i[m/s]
ti [s]
ωsi [1/s]
ωsi [1/s]
nsi [%]
nsi [%]
I
0,11
3,64
36,01
60,02
22,91
38,21
I
0,11
3,18
36,01
60,02
22,91
38,21
I I
0,05
0,63
16,37
27,28
10,42
17,37
IV
0,05
4,00
16,37
27,28
10,42
17,37
V
0,00
8,00
0
0
0
0
s1 = s0 + v0t + ௧మ ; s
ଶ
0 = 0, v0 = 0
మ
s1 = ௧మ = ௩ ∙ ௧ = ௩∙௧ → ݐ
= 3,64ݏ;
ଶ
௧
ூ = ଶ௦
ଶ
ଶ
௩
ݐூூ = ௦మି௦ =3,18s;
௩
ݐூூூ = ଶ(௦ି௦) =0,625s;
௩ା௩
ݐூ = ௦ೇି௦ =4s;
௩
ݐ = ଶ(௦ೇି௦ೇ) =8s;
௩బା௩
Czasy od początku ruchu wózka wynoszą odpowiednio: t1 = 3,64s
t2 = tI+tII = 6,82s i analogicznie reszta t3 = 7,44s
t4 = 11,44s
t5 = 19,44s
ωsi = ସ௩ ∙ ݅; ݅ = 10,23
ః
ωs1d = 36,01[ଵ]
ω
]
௦
s1m = 60,02[ଵ
௦
ωs2d = 16,37[ଵ]
ω
]
௦
s2m = 27,28[ଵ
௦
nmax = 1500[]
ns1d = 343,87[] → 22,92% n
] → 38,21% n
max
ns1m = 573,15[
max
ns2d = 156,32[] → 10,42% n
] → 17,37% n
max
ns2m = 260,50[
max
m = 3,56kg – masa wózka
M = 4,88kg – masa obciążenia
In = 6,64∙10-3[kg∙m2]
Ip = 9∙10-4[kg∙m2]
Iw = 4,44∙10-4[kg∙m2]
i = 10,23
Obliczenia ε(przyspieszenia) silnika dla odpowiednich przedziałów czasu(do wykresu) ε = ௱ఠ
௱௧
ε1(0 →3,64) = ଷ,ଵ = 9,89[ ଵ ]
ଷ,ସ
௦మ
ε2(6,82→7,44) = ଵ,ଷିଷ,ଵ = -31,42[ ଵ ]
,ଶହ
௦మ
ε3(11,44 → 19,44) = ିଵ,ଷ =-2,05[ ଵ ]
଼
௦మ
Mst = ቀሺାெሻ ∙ థ − ∙ థቁ ∙ ଵ = ቀெథቁ ∙ ଵ = 0,146224[ܰ݉]
ଶ
ଶ
ଶ
ଶ
ସ
Md = Izr௱ఠ
௱௧
M = Mst + Md
ଵ I 2 = σ ଵ݉ ଶ + σ ଵܫ ଶ /∙ 2
ଶ zrωs
ଶ
ݒ
ଶ ω
1
1
ܫ
ଶ
ଶ
ଶ
ଶ
ଶ
௭ω௦ = ܯ(ݒ ∙ )ଶ + ܫ
)ଶ + ܫ
+ I
+ I
/ω
݅
(ω௦ ∙ ݅
ωୱ
୵ω୵
୵ω୵
ୱ
మ
మ
ܫ
ଵ
థ
௭ = ܫ + ܫ
+ ܯ ଵ
+ 2I
∙ థ ; ݒ = ߱ݎ → ߱ థ; ߱
∙ ߱
∙ ߱
మ
మ ସ
୵ ∙ ଵ ସ∙థమ
௪ =
ௗ = థ
ௗ
ೢ
ଶ
ଶோ
ଶ∙థೢ
ܫ
,ଵଶହమ
௭ = 0,0009 + 0,00664
ଵ
+ 4,88 ଵ
+ 2 ∙ 0,00044 ∙ ଵ ∙ ሺ,ଵଶହሻమ =
ଵ,ଶଷమ
ଵ,ଶଷమ
ସ
ଵ,ଶଷ ସ∙ሺ,ଷሻమ
= 0,00123[݇݃ ∙ ݉ଶ]
Md(0 → 3,64s) = ܫ௭ ∙ ߝଵ = 0,001145 ∙9,89 = 0,0122
N= M ∙ ωs (np. dla t
=3,64→
0,158424 ∙36,1) =
5,72[W]
N = (0s) N(19,44s)=0
Md(0 → 3,64s) = 0,0122
M = 0,158424[Nm] N (3,64) = 5,72[W]
Md(3,64 → 6,82s) = 0
M = 0,146224[Nm] N (6,82) = 5,28[W]
Md(6,82 → 7,44s) = -0,0386
M = 0,107624[Nm] N (7,44) = 1,76[W]
Md(7,44 → 11,44s) = 0
M = 0,146224[Nm] N (11,44) = 2,39[W]
Md(11,44 → 19,44s) = -0,0025
M = 0,143724[Nm] N (19,44) = 0[W]
Obliczenia ε(przyspieszenia) silnika dla odpowiednich przedziałów czasu(do wykresu) ε = ௱ఠ
௱௧
ε1(0 →3,64) = ,ଶ = 16,51[ ଵ ]
ଷ,ସ
௦మ
ε2(6,82→7,44) = ଶ,ଶ଼ି,ଶ = -52,384[ ଵ ]
,ଶହ
௦మ
ε3(11,44 → 19,44) = ଶ,ଶ଼ = -3,41[ ଵ ]
଼
௦మ
Mst = ቀሺାெሻ ∙ థ − ∙ థቁ ∙ ଵ = ቀெథቁ ∙ ଵ = 0,088[ܰ݉]
ଶ
ଶ
ଶ
ଶ
ସ
Md = Izr௱ఠ
௱௧
M = Mst + Md
ଵ I 2 = σ ଵ݉ ଶ + σ ଵܫ ଶ /∙ 2
ଶ zrωs
ଶ
ݒ
ଶ ω
1
1
ܫ
ଶ
ଶ
ଶ
ଶ
ଶ
௭ω௦ = ܯ(ݒ ∙ )ଶ + ܫ
)ଶ + ܫ
+ I
+ I
/ω
݅
(ω௦ ∙ ݅
ωୱ
୵ω୵
୵ω୵
ୱ
మ
మ
ܫ
ଵ
థ
௭ = ܫ + ܫ
+ ܯ ଵ
+ 2I
∙ థ ; ݒ = ߱ݎ → ߱ థ; ߱
∙ ߱
∙ ߱
మ
మ ସ
୵ ∙ ଵ ସ∙థమ
௪ =
= థ
ೢ
ଶ
ଶோ
ଶ∙థೢ
ܫ
,ହమ
௭ = 0,0009 + 0,00664
ଵ
+ 4,88 ଵ
+ 2 ∙ 0,00044 ∙ ଵ ∙ ሺ,ହሻమ =
ଵ,ଶଷమ
ଵ,ଶଷమ
ସ
ଵ,ଶଷ ସ∙ሺ,ଷሻమ
= 0,00106[݇݃ ∙ ݉ଶ]
Md(0 → 3,64s) = ܫ௭ ∙ ߝଵ = 0,00106 ∙16,51 = 0,0175
N = M ∙ ωs (np. dla t =3,64→
0,1055 ∙ 60,02) = 6,33
N(0s) i N(19,44s) =0
Md(0 → 3,64s) = 0,0175
M = 0,1055[Nm]
N(3,64) = 6,33[W]
Md(3,64 → 6,82s) = 0
M = 0,0880[Nm]
N(6,82) = 5,28[W]
Md(6,82 → 7,44s) = -0,0555
M = 0,0325[Nm]
N(7,44) = 0,89[W]
Md(7,44 → 11,44s) = 0
M = 0,0880 [Nm]
N(11,44) = 2,40[W]
Md(11,44 → 19,44s) = -0,0036
M = 0,0844, [Nm]
N(19,44) = 0[W]
Wykresy na podstawie obliczeń powyżej: Duże Koło:
n(t)
400
n sil
[obr/min]
czas[s]
350
300
0
0
343,87
250
3,64
343,87
200
6,82
w(t)
150
156,32
7,44
100
156,32
11,44
50
0
19,44
0
0
5
10
15
20
25
ε(t)
Przys. ε[ ଵ ]
௦మ
Czas[s]
15
9,89
0
10
9,89
3,64
5
0
3,64
0
0
6,82
-5 0
5
10
15
20
25
-31,42
6,82
-10
-31,42
7,44
e(t)
-15
0
7,44
-20
0
11,44
-25
-2,05
11,44
-30
-2,05
19,44
-35
0
19,44
M(t)
0,146224
0
0,17
0,158424
0
0,16
0,158424
3,64
0,15
0,146224
3,64
0,146224
6,82
0,14
0,107624
6,82
0,13
M(t)
0,107624
7,44
0,12
0,146224
7,44
0,146224
11,44
0,11
0,143724
11,44
0,1
0,143724
19,44
0
5
10
15
20
25
0,146224
19,44
N(t)
7
6
Moc[W]
Czas[s]
5
0
0
5,72
3,64
4
5,28
6,82
3
1,76
7,44
N(t)
2
2,39
11,44
0
19,44
1
0
0
5
10
15
20
25
n(t)
700
n sil
600
[Obr/min]
Czas[s]
500
0
0
400
573,15
3,64
573,15
6,82
300
n(t)
260,50
7,44
200
260,50
11,44
0
19,44
100
0
0
5
10
15
20
25
ε(t)
Przys.
20
ε[ ଵ ]
௦మ
Czas[s]
10
16,51
0
0
16,51
3,64
0
3,64
-10 0
5
10
15
20
25
0
6,82
-20
e(t)
-52,38
6,82
-30
-52,38
7,44
0
7,44
-40
0
11,44
-50
-3,41
11,44
-60
-3,41
19,44
0
19,44
M(t)
0,898
0
0,11
0,915
0
0,1
0,915
3,64
0,09
0,898
3,64
0,898
6,88
0,08
0,8441
6,88
0,07
0,8441
7,44
0,06
M(t)
0,898
7,44
0,05
0,898
11,44
0,04
0,8945
11,44
0,03
0,8945
19,44
0
5
10
15
20
25
0,898
19,44
N(t)
7
Moc[W]
Czas[s]
6
0
0
5
6,33
3,64
4
5,28
6,88
0,89
7,44
3
N(t)
2,40
11,44
2
0
19,44
1
0
0
5
10
15
20
25
Wykresy uzyskane na drodze doświadczalnej: Duże Koło:
400
300
200
100
Prędkość
Prędkość zadana
0
Przyspieszenie silnika
0
5
10
15
20
25
30
-100
-200
-300
Czas [s]
N(t)
5
4
3
2
oc [W]
Moc
M
1
0
0
5
10
15
20
25
30
-1
Czas [s]
700
600
500
400
300
200
Prędkość
100
Prędkość zadana
Przyspieszenie silnika
0
0
5
10
15
20
25
30
-100
-200
-300
-400
Czas[ s]
N(t)
7
6
5
4
3
oc [W]
Moc
M
2
1
0
0
5
10
15
20
25
-1
Czas [s]
Wykresy sporządzone obliczeniowo w przybliżeniu pokrywają się z wykresami rzeczywistymi wykonanymi na podstawie pomiarów, przez co możemy je traktować jako poglądowe przedstawiające ogólną skalę badanej wielkości.
Na rzeczywistych wykresach mocy widać ze dla dużego koła moc potrzebna do uzyskania danej prędkości ruchu wózka jest mniejsza niż dal małego koła, czego nie można zauważyć na wykresach obliczeniowych, gdzie maxymalne wartości mocy praktycznie się pokrywają.
Najgwałtowniejsze zmiany następują przy zmianie prędkości. Na obu wykresach zaobserwować możne że po osiągnięciu danej prędkości wykres stabilizuje się, ponieważ moc silnika w chwili osiągnięcia danej prędkości była np. dla zwiększania prędkości nieco wyższa od mocy potrzebnej do pracy z określoną prędkością.
Układ przedstawiony na schemacie zawsze posiada swój moment statyczny wynikający z obciążenia układu. Aby wprawić go w ruch potrzebujemy momentu dynamicznego, który zapewnia nam silnik. Moment całkowity jest sumą momenty statycznego i dynamicznego.
Moment dynamiczny wynosi 0 gdy układ spoczywa lub porusza się ruchem jednostajnym.
Wyszukiwarka
Podobne podstrony:
1403 Nie przenoście nam stolicy do Krakowa Pod Budą (2)
wyjazd do krakowa i warszawy 1, zarządzanie w kulturze, I rok, semestr letni
Wycieczka klasy 3c do Krakowa
Express Do Krakowa
066 Od Warszawy do Krakowa (nuty)
Wycieczka do krakowaCiesiel
066 Od Warszawy do Krakowa (tekst)
2014 04 konspekt-final, Różne, Przygotowanie do ŚDM w Krakowie 2016 rok, Grudzień 2013 rok, Styczeń
2014 01 wprowadzenie final, Różne, Przygotowanie do ŚDM w Krakowie 2016 rok, Grudzień 2013 rok, Styc
BETON pytania do egzaminu1, Politechnika Krakowska BUDOWNICTWO, II ROK, Technologia Betonu (Rawicki)
okb- wykłady-ściąga do druku, Politechnika Krakowska, VI Semestr, Organizacja kierowanie budowa i BH
Zastosowanie fotokomórki do pomiarów fotometrycznych, Politechnika Krakowska
ilustracje do legend o krakowie, ilustracje do legendy o panu twardowskim
2014 06 medytacja 2, Różne, Przygotowanie do ŚDM w Krakowie 2016 rok, Grudzień 2013 rok, Styczeń 201
2014 05 medytacja 3, Różne, Przygotowanie do ŚDM w Krakowie 2016 rok, Grudzień 2013 rok, Styczeń 201
OPIS DO PROJEKTU, Politechnika krakowsla, uczelnia, konstrukcje drewniane, Nowy folder
więcej podobnych podstron