Laboratorium Podstaw automatyki |
|
|||
temat: Matlab i Simulink |
|
|
||
Mechatronika |
gr. dz. Ib |
gr. lab. 3 |
18.03.2009r |
|
Wstęp teoretyczny:
Matlab - Nazwa programu pochodzi od angielskich słów MATrix LABoratory, gdyż początkowo program ten był przeznaczony do numerycznych obliczeń macierzowych. Obecnie program ten potrafi znacznie więcej, cechuje go duża liczba funkcji bibliotecznych oraz duże możliwości rozbudowy przez użytkownika za pomocą pisania własnych funkcji. Posiada on swój język programowania, co umożliwia pisanie w pełni funkcjonalnych programów działających w środowisku Matlaba.
W zakresie grafiki Matlab umożliwia rysowanie dwu i trójwymiarowych wykresów funkcji oraz wizualizację wyników obliczeń w postaci rysunków statycznych i animacji. Możliwe jest pobieranie danych pomiarowych z urządzenia zewnętrznego przez porty w celu ich obróbki. Wszystko to powoduje, że program ten znajduje bardzo szerokie zastosowanie.
Simulink - jest częścią pakietu matematycznego MATLAB firmy The MathWorks i służy do przeprowadzania symulacji komputerowych. Simulink pozwala budować modele symulacyjne przy pomocy interfejsu graficznego i tzw. bloków. Przy pomocy Simulinka można przeprowadzać zarówno symulacje z czasem dyskretnym jak i ciągłym.
Simulink znajduje głównie zastosowanie (poprzez to, że umożliwia symulacje w czasie ciągłym) w cyfrowym przetwarzaniu sygnałów, analizie obwodów elektrycznych i teorii sterowania
Opis wykonanego zadania
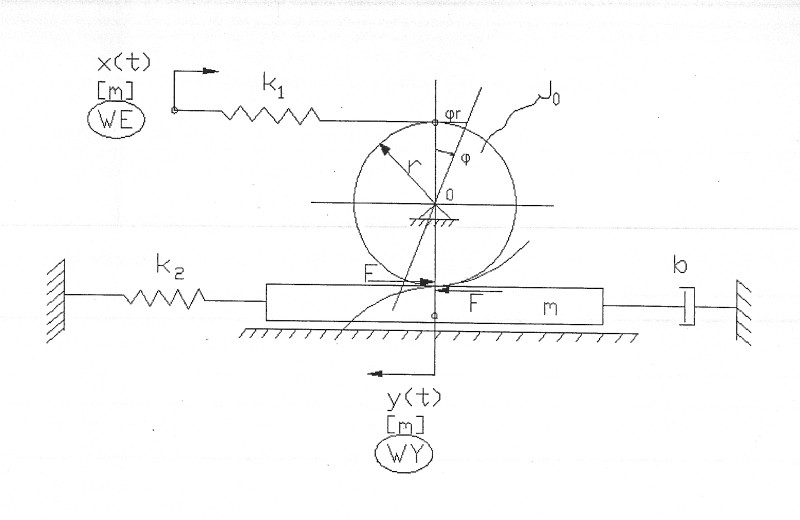
Rys. 1 - schemat badanego układu
a) Cele ćwiczenia:
- określenie transmitancji operatorowej przy pomocy programu MATLAB
- zamodelowanie działania układu o danej transmitancji operatorowej pomocy
programu SIMULINK
b) Ręczny sposób obliczania transmitancji operatorowej :
Wyznaczanie transmitancji oraz modelowanie układu
Wyznaczenie transmitancji operatorowej
Do obliczenia transmitancji operatorowej układu w programie MATLAB użyto następujących poleceń:
- printsys(L,M) - wyświetla wyznaczoną transmitancję operatorową układu dla zdefiniowanych wartości L i M, gdzie L jest licznikiem wzoru na transmitancje K(s)=Y(s)/X(s), a M jest mianownikiem tego wzoru.
- bode(L,M) - wykreśla wykres Bode'a dla podanych wartości L i M (gdzie L- licznik [Y(s)] , M- mianownik [X(s)], transmitancji operatorowej K(s)). Wykres Bode'a logarytmiczna zależność amplitudy i fazy od częstotliwości, wyznaczona dla obiektu automatyki lub układu elektronicznego opisanego transmitancją operatorową.
- nyquist(L,M) - wykreśla wykres Nyquist'a dla podanych wartości L i M. Wykres Nyquist'a zwany też charakterystyką amplitudowo-fazową w automatyce, wykres transmitancji widmowej układu na płaszczyźnie zmiennej zespolonej.Można ją wyznaczyć doświadczalnie, dokonując pomiarów (w stanie ustalonym) amplitudy oraz przesunięcia fazowego sygnału wyjściowego układu, gdy sygnałem wejściowym jest sygnał sinusoidalny o stałej amplitudzie i częstotliwości. Na wykresie umieszcza się punkty odpowiadające wartościom transmitancji widmowej dla kolejnych wartości pulsacji
. Kierunek strzałki oznacza kierunek wzrostu ω. Na osi rzędnych odłożona zostaje wartość części urojonej, a na osi odciętych wartość części rzeczywistej transmitancji widmowej. Wykres charakterystyki amplitudowo-fazowej układu realizowalnego fizycznie dąży do początku układu współrzędnych. Składa się z dwóch wykresów: charakterystyki amplitudowej oraz charakterystyki fazowej.
- step(L,M) - wyznacza odpowiedź skokową układu (zdefiniowanego transmitancją operatorową)
- impulse(L,M) - wyznacza odpowiedź impulsową układu (zdefiniowanego transmitancją operatorową)
Kod programu:
% DANE
Jo=2.5;
m=5;
r=0.3;
k1=10000;
k2=7000;
b=67;
L=[k1]
M=[(Jo/r^2+m) b (k1+k2)];
printsys(L,M)
subplot(2,2,1)
bode(L,M)
grid
subplot(2,2,2)
nyquist(L,M)
subplot(2,2,3)
step(L,M)
grid
subplot(2,2,4)
impulse(L,M)
grid
Modelowanie układu
Wyznaczanie nastawień regulatora PID metodą Zieglera-Nicholsa
a) Ręczny sposób wyznaczania nastawień regulatora PID
- ustawienie regulatora PID na działanie tylko proporcjonalne, dzięki czemu uda się wyznaczyć granicę stabilność układu Kkr (dla naszego układu Kkr>320)
- wprowadzając Kkr uzyskamy odpowiedź dla granicy stabilności, z wykresu której odczytujemy Tkr (dla naszego układu Tkr=1.98)
- obliczamy nastawy regulatora PID wg wzoru
Kp = 0.2*Kkr
Ti = 0.33*Tkr
Td = 0.5*Tkr
b) Program w MATLAB'ie do wyznaczania nastaw regulatora PID
clear all;
clc;
clf;
% TRANSMITANCJA OBIEKTU
L1=[0.5];
M1=[1 20 10 40];
clc;
disp(`transmitancja operatorowa obiektu')
tf(L1,M1)
% TRANSM. UKL. BEZ REGULATORA
[L2,M2]=cloop(L1,M1,-1);
subplot(4,1,1)
impulse(L2,M2)
legend(`uklad bez regulatora')
t=[0:0.01:20];
[y1,x,t]=impulse(L2,M2,t)
grid
% ODPOWIEDZ UKLADU Z WZOCNIENIEM Kkr
Kkr=320;
[L3,M3]=cloop(Kkr*L1,M1,-1);
subplot(4,1,2)
impulse(L3,M3)
legend(`uklad na grabnicy stabilnosci')
grid
% WYZNACZENIE NASTAW REG. PID
Tkr=4.5-2.52;
Kp=0.2*Kkr;
Ti=0.33*Tkr;
Td=0.5*Tkr;
% TRANSMITANCJA REG. PID
[Lr,Mr]=parallel([0 1],[Ti 0],[0 1]);
[L_pid,M_pid]=parallel(kp*Lr,Mr,kp*[1],[1]);
disp(`transmitancja regulatora PID')
tf(L_pid,M_pid)
% TRANSMITANCJA UKŁADU Z REGULATOREM PID
[L4,M4]=series(L_pid,M_pid,L1,M1);
[L_z_reg,M_z_reg]=cloop(L4,M4,-1);
subplot(4,1,3)
impulse(L_z_reg,M_z_reg)
[y2,x,t]=impulse(L_z_reg,M_z_reg,t);
grid
legend('uklad z regulatorem PID')
% POROWANIE
subplot(4,1,4)
plotyy(t,y1,t,y2)
title(`Porownanie odpowiedzi impulsowych')
xlabel(`t[s]')
grid
c) Układ regulatorem PID w programie SIMULINK
Wnioski
Program MATLAB jest pomocny przy tworzeniu układów automatyki (m. in. wyznaczaniu transmitancji operatorowej, modelowaniu, wyznaczaniu nastaw regulatora PID ), gdyż umożliwia dla raz podstawionych wartości, wyznaczać wykresy odpowiedzi układu na różne rodzaje sygnałów (skokowych, impulsowych), wyznaczenie charakterystyki Bode'a i charakterystyki Nyquist'a. Poprzez stworzenie modelu w programie SIMULINK można zasymulować działanie układu (wyznaczanie wykresów) , przy różnych rodzajach sygnałów wejściowych. Ułatwia on wykonywanie potrzebny operacji matematycznych (przy wyznaczaniu transmitancji operatorowej i wyznaczania nastaw regulatora PID), oraz zapewnia możliwość stworzenia odpowiednich wykresów w zależności od potrzeb.
Wyszukiwarka
Podobne podstrony:
Reg PR 27-01 , LABORATORIUM PODSTAW AUTOMATYKI
ĆWICZENIA ANALOGOWE, PWR [w9], W9, 3-4, Semestr bez wpisu, Podstawy automatyki, Laboratorium, Podsta
CWICZENIE 2(1), PWR [w9], W9, 3-4, Semestr bez wpisu, Podstawy automatyki, Laboratorium, Podstawy au
AUTORZY, PWR [w9], W9, 3-4, Semestr bez wpisu, Podstawy automatyki, Laboratorium, Podstawy automatyk
przekazniki automaty 5 wojto, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Podstawy Automat
Regul wiel 2001 , Laboratorrium Podstaw Automatyki
Laboratorium Podstaw Automatyki
pidy6poprawione, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Podstawy Automatyki 2, przyda
automaty, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Podstawy Automatyki 2, przydatne
sprawko 1D, Automatyka 1d, Laboratorium z Podstaw Automatyki
5D Stosowanie PLC do sterow(1), PWR [w9], W9, 3-4, Semestr bez wpisu, Podstawy automatyki, Laborator
Elektronika- Komputerowa symulacja analogowych układów elektronicznych.DOC, LABORATORIUM PODSTAW AUT
paa1, Laboratorium Podstaw Automatyki
REG PID 27-01.DOC, Laboratorium Podstaw Automatyki
Ćwiczenia laboratoryjne z podstaw automatyki Krajewski, Musielak
Z2, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
automaty, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy au
więcej podobnych podstron