Laboratorium automatyki i napędu elektrycznego
Wykonali:
Armata Wojciech
Domagała Sebastian
Jaros Mateusz
gr 302A
Temat projektu : Budowa pojazdu silnikowego z pełnym układem regulacji
Cel projektu : Celem projektu jest wyznaczenie sposobu sterowania silnika obcowzbudnego prądu stałego, napędzającego pojazd o parametrach :
m = 600kg (masa)
R = 0.25m (promień koła)
Fobc = 200N (najmniejsza siła potrzebna do wprawienia w ruch)
U = 360V (bateria akumulatorów)
Dobór silnika, przekładni, rozpędzanie pojazdu
dobór wartości mocy silnika oraz prędkości znamionowej silnika pradu stałego jeśli wiadomo, że żądane przyspieszenie od 0 - 100km/h ma odbywać się w czasie
t = 10s. Wyznaczyć wartość przekładni silnik/koła zapewniającej optymalne warunki rozruchu.wyznaczenie parametrów elektrycznych oraz mechanicznych pojazdu
budowa układu symulacyjnego silnika obcowzbudnego (w postaci nieskupionej)
w pakiecie MATLAB-SIMULINK.wyznaczyć stromość/wartość napięcia zasilającego zapewniającego przyspieszenie pojazdu 0 - 100km/h w czasie t = 10s. Uwaga: w obliczeniach uwzględniamy parametry pojazdu sprowadzone do wału silnika dla przekładni Z1 - J, Mst
przebiegi czasowe prądu i prędkości podczas rozruchu pojazdu.
Jazda w górę/w dół : dobór regulatora prądu i prędkości
Po dokonanym rozruchu następuje jazd w górę/dół.
dobór przekładni jeśli wiadomo, że wzniesienie nachylone jest pod kątem
budowa schematu blokowego silnika prądu stałego z podziałem na część elektryczną/mechaniczną w pakiecie MATLAB-SIMULINK
dobór regulatora prądu (kryt. Modułu I) oraz regulatora prędkości (kryt. Symetrii II), zapewniający samoistną stabilizację prędkości pojazdu (tempomat).
symulacja pełnego układu regulacji dla różnych przypadków obciążenia : przebiegi prądu i prędkości
Uwaga : Pokonywanie wzniesienia wymaga dobrania nowej przekładni Z2 zapewniającej optymalne warunki pracy silnika (moment obciążenia widziany od strony wału nie może przekraczać momentu znamionowego Mn), a tym samym ponownego sprowadzenia parametrów pojazdu J, Mst do wału silnika.
Wnioski końcowe/bierzące
zestawienie różnych sytuacji obciążenia : momenty bierny, czynny, skokowa zmiana obciążenia dla przypadku gdy
i
analiza transmitancji silnika pod kątem odpowiedzi skokowej : człon oscylacyjny, aperiodyczny
porównanie dwóch sposobów rozruchu : skokowe napięcie zasilające, liniowo narastające napięcie - zalety/wady
analiza zastosowana podczas doboru regulatorów : wykresy Bodego
(regul. Prędkości), Nyquista (regul. prądu)
Uproszczenia
w przypadku wyznaczania przebiegu prędkości
pomijamy wpływ indukcyjnościzakładamy brak oporu powietrza oraz puntkowe skupienie masy pojazdu
uproszczenia zastosowane podczas doboru regulatorów : prędkości i prądu
wyniku obliczeń do 2-go miejsca. po przecinku
Ad. 1) a)
Przyjmujemy parametry silnika które będą potrzebne do dalszych obliczeń.
Prędkość znamionowa silnika
Indukcyjność
Sprawność znamionowa
Współczynnik
Przekładnie wózka dobieramy tak aby przy prędkości znamionowej silnika została osiągnięta prędkość
wózka.
Prędkość wózka
Obwód koła
Prędkość kątowa silnika
Prędkość kątowa kola
Przekładnia
Silnik powinien być mocy
Przyjmujemy silnik o mocy znamionowej 40kW gdyż silnik możemy chwilowo przeciążyć
Ad. 1) b)
Moc strat
Moment silnika
Moment strat
lub
Wyprowadzenie wzoru na bezwładność
Parametry silnika
Wartości sprowadzone na wał
Ad. 1) c)
Postać silnika w MATLAB-SIMULINK
Wykres napięcia, prądu i prędkości
Ad. 1) d)
Start wózka ma się odbywać poprzez skok jednostkowy napięcia lub poprzez narastanie.
Wyprowadzenie wzoru dla skoku napięcia (od 0 do określonej wartości Uz)
Dla t = 0s
Podstawiając C1 do wcześniejszego wzoru otrzymujemy
Po czasie t = 10s
Skokowa wartość napięcia ma wynosić 334,13V
Wyprowadzenie wzoru dla narastającego napięcia (od 0 do określonej wartości U = βt gdzie β jest współczynnikiem narastania funkcji napięcia w czasie)
Ostatecznie otrzymujemy wzór
Dla czasu t = 0s
Dla ωa = 0
Ad. 1) e)
Układ dla skoku jednostkowego napięcia Uz
Wykres napięcia, prądu i prędkości
Układ dla narastającego napięcia U = βt
Wykres napięcia, prądu i prędkości
Połączony układ dla narastającego napięcia U = βt i skoku jednostkowego napięcia Uz.
Wykres napięcia, prądu i prędkości
Ad. 2) a)
Przekładnia dobierana jest tak aby silnik pracował z momentem znamionowym przy znamionowym obciążeniu ( Mn = Mst )
Dodając moment strat samego wózka z momentem strat na pokonanie pochylni mamy
Przekładnia zatem wyniesie
Wartości sprowadzone na wał
Ad. 2) b)
Rozdzielając schemat silnika na część elektryczną i część mechaniczną rozdzielamy stałe czasowe Tm i Te a co za tym idzie to otrzymujemy bloki które możemy regulować prądowo i prędkościowo
Jeżeli
Δ > 0 => aperiodyczny
Δ = 0 => na granicy stabilności (oscylacyjny)
Δ < 0 => oscylacyjny
mia
Ad. 2) c)
Regulacja części elektrycznej - regulator prądu .
Dobieranie parametrów regulatora polegać będzie do rozwiązaniu układu zamkniętego regulacji kryterium modułu. Dzięki temu kryterium wyznaczymy parametry regulatora prądu które będą dobrane na szeroki zakres częstotliwości pracy układu. Głównym warunkiem doboru przez to kryterium jest moduł transmitancji zamkniętej równy 1 w szerokim paśmie częstotliwości.
Transmitancja regulatora
Schemat transmitancyjny układu regulacji prądu dla napędu
kp = 36 Tp => czas opóźnienia
Czas regulacji dobieramy tak żeby usunąć dominującą stałą czasową Te czyli Te = TR
Ostatecznie transmitancja otwartego układu regulacji wynosi
a układu zamkniętego wynosi
Rozwiązując układ przez kryterium modułu otrzymujemy
Otrzymane parametry regulatora to:
Wzmocnienie równe
Czas całkowania
Dla sprawdzenia otrzymanych wartości regulatora sporządzamy wykresy Bode'go i Nyquist'a w celu sprawdzenia zapasu modułu i fazy czyli stabilności układu regulacji.
Z wykresu Nyquist'a wynika że układ jest stabilny gdyż nie przechodzi przez punkt
i układ pracuje w szerokim zakresie częstotliwości
Z wykresu Bode'go wynika, że układ posiada duży zapas modułu i fazy co wiąże się z dużym zapasem stabilności.
Regulacja części mechanicznej - regulator prędkości.
Dobieranie parametrów regulatora polegać będzie do rozwiązaniu układu zamkniętego regulacji kryterium symetrii. Dzięki temu kryterium wyznaczymy parametry regulatora prędkości które będą dobrane ze względu na różnice stałych czasowych. Głównym warunkiem doboru przez to kryterium jest to że moduł transmitancji układu zamkniętego jest w szerokim zakresie równy jeden
Transmitancja regulatora
Schemat transmitancyjny układu regulacji prędkości napędu
Minimalizując układ transmitancji
=> Tp bardzo małe więc pomijamy
=> dla szerokiego zakresu ω także ten człon pomijamy
Stosując też uproszczenie
i
otrzymujemy
Zminimalizowany układ możemy łączyć z regulatorem i obliczyć parametry regulatora według kryterium symetrii.
Transmitancja postaci
układu zamkniętego daje symetrie układu otwartego.
Przekształcając naszą transmitancje na ten układ otrzymujemy
Otrzymane parametry regulatora to:
Wzmocnienie równe
Czas całkowania
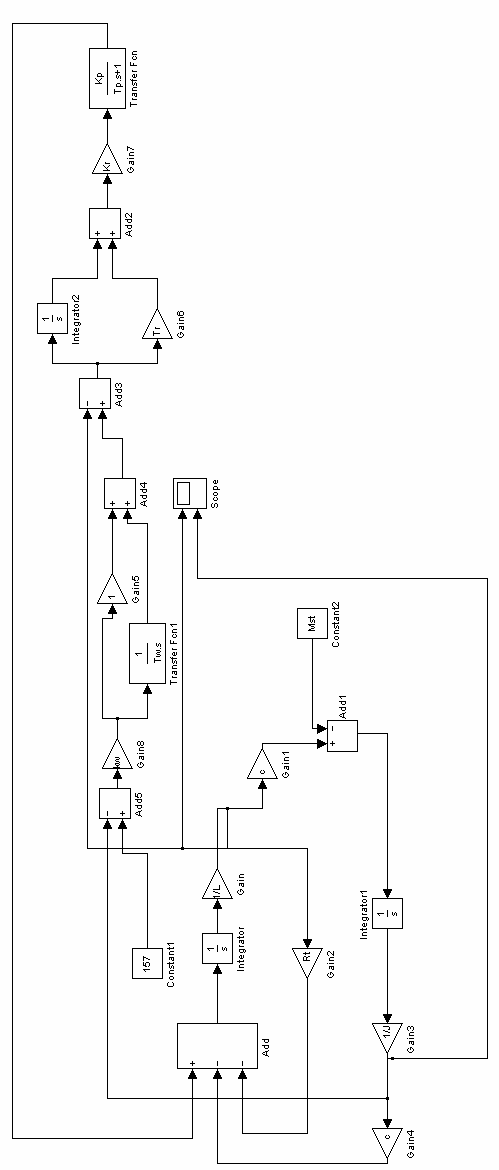
Ad. 2) d)
Pełny układ regulacji w pakiecie MATLAB-SIMULINK
Wykresy prądu i prędkości przy warunkach podanych w treści
Wykresy prądu i prędkości przy bezwładności zwiększonej 3x (masa zwiększyła się 3 x)
Ad. 3)
Indukcyjność wpływa na pracę silnika i jego stabilności pracy w różnych warunkach zasilania i regulacji. Może spowodować nawet nie stabilność układu. Zasilanie poprzez napięcie narastające jest dla silnika najbardziej odpowiednie. Silnik wtedy pobiera najmniej prądu rozruchowego i nie powodowane jest bardzo duże przeciążenie prądowe jak w przypadku zasilania jednostkowym napięciem. Prąd narasta wraz z narastającym napięciem nie przekraczając wartości znamionowej. Regulacja prądowa-napięciowa jest najlepszym sposobem pracy układu. Obliczenia według kryterium modułu i symetrii są troszkę skomplikowane ale przynoszą najlepszy efekt pod względem regulacji. Układ dostosowuje się do warunków otoczenia (pracy), poprzez regulacje prądu i prędkości.
18
Wyszukiwarka
Podobne podstrony:
napęd elektry proj, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, proje
napęd elektry nr9, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projek
Napęd elektr. proj, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, proje
Projekt Napęd elektryczny
napęd elektry pro2, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, proje
napęd elektry teoria, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, pro
Projekt Napęd elektryczny
Napęd Elektryczny wykład
Naped elektr
,elementy i układy elektroniczne I P, projektowanie wzmacniaczy oe
Zadanie 3(1), Elektrotechnika, Rok 3, Napęd elektryczny, Napęd elektryczny wykład
stany awaryjne, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab,
Pradnica samowzbudna przyczyny niewzbudzania sie, Studia, ELEKTROTECHNIKA, Napęd Elektryczny
Napęd elektryczny materiał na kolokwium
elektroenergetyka projekt
więcej podobnych podstron