POLITECHNIKA ŁÓDZKA
BOŻENNA KALUS-JĘCEK ZYGMUNT KUŚMIEREK
WZORCE WIELKOŚCI
ELEKTRYCZNYCH I OCENA
NIEPEWNOŚCI POMIARU
ŁÓDŹ 2000
SPIS TREŚCI
PRZEDMOWA 5
1. PODSTAWOWE WIADOMOŚCI O POMIARACH 1
Metrologia w nauce i technice 7
Istota pomiarów - pojęcia podstawowe 9
Organizacja państwowej służby miar 10
Układ jednostek miar 12
2. WZORCE JEDNOSTEK MIAR 25
2.1. Wiadomości ogólne 25
Definicje 25
Hierarchia wzorców 26
2.2. Wzorce siły elektromotorycznej i napięcia 28
Ogniwo Westona 28
Źródła napięć wzorcowych wykorzystujące efekt Josephsona 32
Elektroniczne wzorce napięcia stałego 35
Kalibratory napięcia 40
2.3. Wzorce rezystancji 41
2.3.1.. Oporniki wzorcowe jednostopniowe 44
Oporniki w/.orcowe regulowane 47
Państwowy wzorzec oporu elektrycznego 48
2.4. Wzorce pojemności 49
2.5 Wzorce indukcyjności 53
Wzorce indukcyjności własnej 53
Wzorce indukcyjności wzajemnej 55
2.6. Źródła częstotliwości wzorcowych 55
3. METODY POMIAROWE 59
Ogólna charakterystyka metod 59
Metody analogowe i cyfrowe 59
Metody bezpośrednie i pośrednie 60
Metody porównawcze 60
4. ANALIZA BŁĘDÓW POMIAROWYCH 64
Przyczyny i rodzaje błędów 64
Teoria błędów 68
Błąd pomiaru bezpośredniego 68
Błąd pomiaru pośredniego 71
Błędy nadmierne i ich wykrywanie 76
5. NIEPEWNOŚCI WYNIKU POMIARU 80
Podstawy teorii niepewności 80
Prawo propagacji niepewności 84
Ocena niepewności w pomiarach bezpośrednich 86
Ocena niepewności typu A 86
Ocena niepewności typu B 89
Ocena niepewności typu A i B 91
5.4. Ocena niepewności w pomiarach pośrednich 94
Ocena niepewności typu A 94
Ocena niepewności typu B 98
Ocena niepewności typu A i B 102
5.5. Sposoby zapisu wyniku pomiaru 105
6. METODY REGRESJI 108
Wprowadzenie 108
Metoda graficzna 108
Metoda najmniejszych kwadratów 110
Regresja liniowa 110
Regresja wielomianowa ] 13
Regresja wielokrotna 114
LITERATURA 116
NORMY H7
PRZEDMOWA
W technice pomiarowej szczególną rolę odgrywają wzorce. Stanowią one podstawę dokładnych pomiarów różnych wielkości fizycznych. W skrypcie przedstawiono i omówiono wzorce podstawowych wielkości elektrycznych, takich jak: wzorce siły elektromotorycznej, napięcia, oporu elektrycznego, pojemności, indukcyjności własnej i wzajemnej oraz częstotliwości. Z prezentowanych wzorców na szczególną uwagę zasługuje wzorzec napięcia zbudowany na bazie złącza Josephsona. Wzorzec ten umożliwia uzyskanie napięcia wzorcowego w przedziale od IV do 10V.
Jakość uzyskanego wyniku pomiaru można ocenić bazując na teorii niepewności lub teorii błędów. Teoria niepewności jest zalecaną do oceny jakości pomiaru przez międzynarodowe organizacje metrologiczne i europejskie laboratoria akredytowane. Powinna być stosowana wszędzie tam, gdzie wymagają tego przepisy. Obliczanie błędów czy niepewności jest procesem dość złożonym. Poprawne stosowanie teorii błędów i niepewności wymaga znajomości probabilistyki i statystyki matematycznej, a także dobrej znajomości samego zagadnienia pomiarowego. W niniejszym opracowaniu podano jedynie ogólne zasady wyznaczania błędów i niepewności.
Skrypt przeznaczony jest dla studentów wydziałów elektrycznych i elektronicznych. Może być przydatny również dla studentów innych wydziałów.
Autorzy serdecznie dziękują Panu prof. dr hab. Zdzisławowi Nawrockiemu za wnikliwą recenzję skryptu i cenne uwagi.
l
PODSTAWOWE WIADOMOŚCI O POMIARACH
1.1. METROLOGIA W NAUCE I TECHNICE
Postęp nauki i techniki jest nierozerwalnie związany z rozwojem metrologii, reprezentującej wiedzę o miarach i mierzeniu. Szybki rozwój techniki pomiarowej wynika stąd, iż znajduje ona zastosowanie we wszystkich dziedzinach działalności człowieka, a więc w badaniach naukowych, wytwarzaniu dóbr materialnych, automatyzacji, komunikacji itd.
Nie ma takiej gałęzi nauk ścisłych lub stosowanych, w której nie zachodziłaby potrzeba wykonywania pomiarów. O jakimkolwiek zjawisku czy też wielkości można mówić, że jest znane dopiero wówczas, gdy umie się je określić nie tylko jakościowo lecz i ilościowo. Teoria, której nie można sprawdzić eksperymentalnie, może być jedynie hipotezą.
W szerszym ujęciu można powiedzieć, że metrologia ma do spełnienia trzy ściśle ze sobą związane grupy zadań:
zadania naukowe,
zadania urzędowo-prawne,
zadania wynikające z udziału w procesach produkcji.
Zadania naukowe metrologii obejmują następujące zagadnienia:
ustalenie podstawowych pojęć metrologicznych, terminologii
i symbolistyki,
opracowanie podstaw teorii mierzenia i zasad budowy przyrządów
i urządzeń pomiarowych,
opracowanie kryteriów oceny dokładności otrzymywanych wyników
pomiarów,
- prace nad jednostkami miar - doskonalenie układu jednostek,
realizację, ochronę i doskonalenie podstawowych wzorców wielkości
fizycznych,
opracowanie systemu przekazywania jednostek miar od wzorców podstawowych do narzędzi kontrolnych i użytkowych,
ustalenie dokładnych danych dla stałych fizycznych, chemicznych, astronomicznych, biologicznych i geofizycznych, udział w kształceniu kadr metrologów na wszystkich poziomach szkolnictwa. Zadania urzędowo-prawne metrologii to:
zabezpieczenie jednolitości miar w nauce, technice i gospodarce narodowej,
wprowadzenie legalnego układu jednostek i przestrzeganiu jego stosowania,
ustalenie obowiązujących wymagań dotyczących przyrządów i urządzeń pomiarowych,
ustalenie wymagań dotyczących laboratoriów pomiarowych, przeprowadzanie badań prototypów przyrządów i urządzeń pomiarowych,
dokonywanie urzędowego uwierzytelniania kontrolnych wzorców miar i kontrolnych przyrządów pomiarowych, kontrola jakości produkowanych narzędzi pomiarowych, sprawowanie nadzoru nad służbą miar.
Zadania metrologii wynikające z jej udziału w procesach produkcji przemysłowej, to:
ustalenie dokładnych danych dotyczących właściwości technicznych surowców i materiałów produkcyjnych, wprowadzanie metod racjonalnego projektowania wyrobów, wprowadzanie technicznie i ekonomicznie uzasadnionych procesów technologicznych,
opracowanie zadań i struktury organizacyjnej nowoczesnej kontroli jakości,
organizowanie służby miar w zakładach przemysłowych i placówkach badawczych.
Odpowiedni poziom i stały rozwój metrologii jest nieodzownym warunkiem unowocześniania produkcji i wzrostu jakości wyrobów. Wymagania stawiane technice pomiarowej stale wzrastają. Mierzy się coraz więcej wielkości o szerokim zakresie mierzalnych wartości. Mierzone są wielkości o dużej zmienności w czasie. Stosowane przyrządy pomiarowe powinny charakteryzować się dobrymi właściwościami dynamicznymi, dużą czułością i niezawodnością.
Dążenie do centralizacji pomiaru, pozwalającej z pewnej odległości od obiektu kontrolować i regulować proces technologiczny, implikuje rozwój automatyzacji pomiarów oraz przyrządów rejestrujących. Budowane są całe systemy pomiarowe, pomiarowo-diagnostyczne itp. Dąży się do uzyskania informacji o coraz większej dokładności, uznając przy tym niemożność dokonania pomiaru
bezbłędnego. Powstaje konieczność określania dopuszczalnych granic błędów i uzależnienia ich od wartości i od konkretnego celu, dla którego prowadzi się pomiar. Udział kosztów aparatury pomiarowej w kosztach inwestycyjnych sięga kilku do kilkunastu procent i ma tendencję rosnącą.
Rozwój technologii wytwarzania aparatury pomiarowej spowodował zmianę treści metrologii. Przestają być problemem: technika odczytu, rola obserwatora, dobór czułości czy zakresu pomiarowego, dobór rezystancji wewnętrznej i inne zagadnienia, które dominowały w metrologii klasycznej. Zamiast tych problemów powstają nowe jak np.: eliminacja zakłóceń, odpowiednie zaplanowanie eksperymentu, oprogramowanie systemu itd.
1.2. ISTOTA POMIARU - POJĘCIA PODSTAWOWE.
Pomiar jest zbiorem operacji mających na celu określenie wartości wielkości mierzonej. Według metrologii stosowanej definicja pomiaru jest następująca:
Pomiar jest to zespól czynności poznawczych, których celem jest dostarczenie danych do ilościowego opisu przedmiotów lub zjawisk, polegający na porównaniu, drogą doświadczenia fizycznego z określoną dokładnością, wielkości mierzonej z pewną jej wartością obraną za jednostkę.
W wyniku pomiaru następuje przyporządkowanie badanym cechom przedmiotów lub zjawisk pewnej miary liczbowej, wyrażającej stosunek wielkości mierzonej do jej jednostki. Stosunek ten jest nazywany wartością wielkości mierzonej. Definicje pojęć występujących w definicji pomiaru są następujące:
Wartość wielkości mierzonej jest to liczba wyrażająca stosunek wielkości mierzonej do jej jednostki.
Wielkość mierzona (metrologiczna), mezurand jest to cecha zjawiska, dala lub substancji, rozróżnialna jakościowo i możliwa do określenia ilościowo.
Jednostka miary jest to umownie przyjęta wartość danej wielkości, służąca do porównywania ze sobą innych wartości tej samej wielkości.
Pomiar określa stan badanej wielkości w pewnej chwili czasowej i w określonych warunkach zewnętrznych.
10
Z matematycznego punktu widzenia można zauważyć, że w pomiarze biorą udział dwa zbiory wielkości:
zbiór X - wielkości x oraz zbiór W- znanej wielkości w.
Elementy zbioru- W są uporządkowane według wartości i oznaczone wskaźnikiem i. Jest to zbiór skończony, utworzony przez wielkość wzorcową, odtwarzaną w procesie pomiaru przez przyrząd pomiarowy. Kolejne elementy tego zbioru w/ i w/+/ różnią się między sobą o wartość 2e > 0. Czyli
w,.-H>.+1=2e>0
Wielkość mierzona stanowi skończony lub nieskończony zbiór ograniczony od góry i od dołu. Na tej podstawie, pomiarem można nazwać takie czynności, które podporządkowują elementowi x ze zbioru X element w ze zbioru W. Ponieważ zbiór W jest dyskretny, podporządkowanie nie może być jednoznaczne; wynikiem podporządkowania pomiaru jest nierówność
Wi<x< wm
Mogą istnieć zbiory W tej samej wielkości o różnych wartościach 2e,>0 odtwarzane przez przyrządy pomiarowe o różnych właściwościach metrologicznych. Nie istnieje jednak zbiór, dla którego e,=0. Założenie 2ep>0 jest podstawowym założeniem metrologii.
Niedoskonałość zmysłów obserwatora nie pozwala odróżnić dwóch sąsiednich elementów zbioru W o różnicy mniejszej niż próg czułości równy 2e(. Ten próg jest ograniczony kwantowością wielu zjawisk.
1.3. ORGANIZACJA PAŃSTWOWEJ SŁUŻBY MIAR
Podstawą organizacji służby miar w Polsce są przepisy zawarte w ustawie z dnia 3 kwietnia 1993 r. „Prawo o miarach" (Dziennik Ustaw nr 55, poz.248). Zgodnie z tą ustawą sprawami miar i probiernictwa zajmuje się Główny Urząd Miar (GUM) z siedzibą w Warszawie. Organizację GUM określa statut nadany przez prezesa Rady Ministrów. Na czele Głównego Urzędu Miar stoi prezes, który jest powoływany przez premiera Rzeczpospolitej Polskiej. Prezesowi GUM podlegają dyrektorzy Okręgowych Urzędów Miar, a dyrektorom tym - naczelnicy Obwodowych Urzędów Miar. Okręgowe Urzędy Miar znajdują się w: Bydgoszczy, Gdańsku, Katowicach, Krakowie, Łodzi, Szczecinie i Warszawie.
Główny zakres działań prezesa GUM to:
11
wydawanie przepisów metrologicznych określających wymagania,
jakim podlegają przyrządy pomiarowe, warunki właściwego ich sto
sowania oraz okresy ważności dowodów kontroli;określanie metod sprawdzania zgodności właściwości przyrządów
pomiarowych z wymaganiami przepisów.
Ustawa „Prawo o miarach" określa system miar w Polsce oraz zasady jego stosowania. Naczelną jego zasadą jest współpraca organów administracji miar zapewniająca zgodność i wymaganą dokładność wyników pomiarów dokonywanych w kraju oraz ich powiązanie z międzynarodowym systemem miar.
Ustawa „Prawo o miarach określa legalne jednostki miar, którymi są jednostki Międzynarodowego Układu Jednostek Miar (SI) oraz jednostki nie należące do układu SI, lecz dopuszczone do stosowania w drodze rozporządzenia Rady Ministrów.
Najistotniejszą częścią prawa o miarach jest kontrola metrologiczna przyrządów pomiarowych.
Przyrządami pomiarowymi są urządzenia techniczne przeznaczone do wykonywania pomiarów lub odtworzenia wartości danej wielkości.
Według art.9 ustawy „Prawo o miarach" przyrządy pomiarowe podlegają kontroli metrologicznej organów administracji miar w formie:
legalizacji;
uwierzytelnienia;
zatwierdzenia typu.
Legalizacja jest sprawdzeniem, stwierdzeniem i poświadczeniem przez organ administracji miar (GUM, Okręgowy lub Obwodowy UM), że przyrząd spełnia wymagania przepisów metrologicznych. Dowodem legalizacji jest cecha legalizacyjna umieszczona na przyrządzie lub świadectwo legalizacyjne. Przyrządy pomiarowe powinny być zgłaszane do legalizacji pierwotnej przez wytwórcę, sprzedawcę lub importera przed wprowadzeniem ich do obrotu lub użytkowania. Obowiązek zgłaszania do legalizacji ponownej ciąży na użytkowniku.
Uwierzytelnienie jest sprawdzeniem, stwierdzeniem i poświadczeniem, że przyrząd pomiarowy spełnia wymagania metrologiczne ustalone w przepisach, normach, zaleceniach międzynarodowych lub właściwych dokumentach, a jego wskazania zostały odniesione do państwowych wzorców jednostek miar. Obowiązkowi uwierzytelnienia podlegają przyrządy pomiarowe określone przez prezesa GUM, mające znaczenie dla bezpieczeństwa życia, ochrony zdrowia i środowiska.
Dowodem uwierzytelnienia jest świadectwo albo cecha uwierzytelnienia. Prezes GUM określa okres ważności uwierzytelnienia.
Przyrządy pomiarowe zalegalizowane uważa się za odpowiadające uwierzytelnieniu.
12
Przyrządy pomiarowe podlegające legalizacji lub uwierzytelnieniu, a także inne przyrządy pomiarowe określone przez prezesa GUM, podlegają zatwierdzeniu typu. Przez typ przyrządu pomiarowego rozumie się ostateczną realizację -w wykonaniu określonego wytwórcy - przyrządu pomiarowego, którego wszystkie elementy mające wpływ na właściwości metrologiczne zostały określone w dokumentacji. Decyzje zatwierdzenia typu są podejmowane na podstawie badań prototypów lub egzemplarzy produkcyjnych tych przyrządów sprawdzających zgodność z wymaganiami zawartymi w przepisach metrologicznych, normach, zaleceniach międzynarodowych lub innych właściwych dokumentach. Wykonanie tych badań GUM morze powierzyć Okręgowym lub Obwodowym UM. Przyrządom, które uzyskały zatwierdzenie typu prezes GUM może nadać znak typu. Znak typu składa się z dużych liter RP i T, dwóch ostatnich cyfr roku, w którym nadano typ przyrządu pomiarowego i kolejnego numeru znaku. (Np. RP T 97 5, gdzie 97 - są dwiema cyframi roku 1997, a 5 jest kolejnym numerem nadanego znaku typu).
Większość przyrządów pomiarowych nie podlega legalizacji ani obowiązkowi uwierzytelnienia lecz prawie wszystkie przyrządy pomiarowe podlegają obowiązkowi zatwierdzenia typu.
1.4. UKŁAD JEDNOSTEK MIAR
W przyrodzie występuje bardzo duża liczba wielkości mierzalnych. Wielkości te są ze sobą powiązane równaniami i definicjami wynikającymi z praw przyrody. Dlatego definiowanie jednostek dla poszczególnych wielkości bez powiązania z pozostałymi wielkościami byłoby nieracjonalne. Tworzy się układy jednostek, w których jednostki miar wszystkich wielkości powinny być jednoznaczne oraz łatwo odtwarzalne.
W procesie tworzenia układu jednostek tworzy się zbiór wszystkich wielkości występujących w tych dziedzinach wiedzy, do których będzie stosowany układ.
Zbiór wszystkich wielkości występujących w równaniach danej dziedziny wiedzy nazywa się układem wielkości.
Spośród wielkości należących do układu wyróżnia się kilka wielkości, które umownie przyjmuje się za wielkości podstawowe.
Każda wielkość podstawowa winna spełniać dwa warunki:
• W definicji wielkości podstawowej nie mogą występować pozostałe wielkości podstawowe.
13
• Wraz z pozostałymi wielkościami podstawowymi układu pozwala zdefiniować wszystkie wielkości danego układu wielkości. Z różnych przyczyn pierwszy warunek nie zawsze bywa spełniony.
Wielkość pochodna jest to wielkość określona za pomocą wielkości podstawowych.
Wielkościom układu przypisuje się jednostki miary; przy tym, jednostki przypisane wielkościom podstawowym nazywa się jednostkami podstawowymi, a jednostki miar wielkości pochodnych odpowiednio - jednostkami pochodnymi
Uporządkowany zbiór jednostek miar określonego układu wielkości stanowi układ jednostek miar.
Dla jednego układu wielkości można utworzyć kilka układów jednostek ponieważ w pewnym stopniu dobór jednostek jest dowolny (np.: układy CGS i MKS z różnymi modyfikacjami). Obecnie w większości krajów świata, w tym również i w Polsce obowiązuje Międzynarodowy Układ Jednostek Miar Sl (Systeme International d'Unites) w skrócie SI. Układ SI został zatwierdzony przez XI Generalną Konferencję Miar w 1960r. Układ ten był kilkakrotnie modyfikowany i uzupełniany uchwałami kolejnych Generalnych Konferencji Miar (XII - 1964r., XIII - 1967/68r., XIV - 1971r., XV - 1975r. i XVI - 1979r.).
W układzie SI wyróżniono siedem wielkości i jednostek podstawowych oraz dwie wielkości i jednostki uzupełniające.
Lp. |
Wielkość |
Jednostka |
Symbol |
1. |
długość |
metr |
m |
2. |
masa |
kilogram |
kg |
3. |
czas |
sekunda |
s |
4. |
natężenie prądu elektrycznego |
amper |
A |
5. |
temperatura |
kelwin |
K |
6. |
światłość |
kandela |
cd |
7. |
ilość materii |
mol |
mol |
8. |
kąt płaski |
radian |
rad |
9. |
kąt bryłowy |
steradian |
sr |
W układzie SI przenikalność dielektryczna próżni e0 i przenikalność magnetyczna próżni Ho są liczbami mianowanymi; ich wartości i wymiar są następujące
—10-9-,
36n m
= 47i.l(T7-m
(1.1)
14
Są one związane z prędkością światła w próżni zależnością
T
(1.2)
Niektóre z jednostek podstawowych układu SI były stosowane już we wcześniej używanych układach jednostek miar, jednak wraz z rozwojem nauki i techniki pomiarowej zmieniały się ich definicje. Obecnie dąży się do definiowania jednostek podstawowych przy wykorzystaniu zjawisk atomowych, co zapewnia dużą dokładność i powtarzalność wzorców „zbudowanych" według takich definicji.
Jednostka długości - metr występowała w wielu wcześniejszych układach jednostek miar. Metr definiowano początkowo w odniesieniu do długości południka ziemskiego, później - według platynoirydowego wzorca z Międzynarodowego Biura Miar i Wag w Sevres. Do 1983 roku metr był odwzorowywany przez porównanie z długością fali świetlnej, pomarańczowej linii widma izotopu kryptonu 3686Kr. Obecnie metr jest definiowany na podstawie prędkości światła w próżni. Obowiązuje poniższa definicja.
Metr jest to długość drogi przebytej w próżni przez światło w czasie równym
l s
299792458 '
Obowiązująca definicja metra nie spełnia jednego z warunków stawianych wielkościom podstawowym układu jednostek lecz jej przyjęcie zapewnia lepszą dokładność odtworzenia jednostki, co ma związek z rozwojem pomiarów prędkości światła w próżni.
Kilogram -jednostka masy nie doczekał się dotychczas wzorca atomowego, jakkolwiek istnieje propozycja wykorzystania do tego celu izotopu węgla I2C (jako masę 50259,36217-1021 atomów tego izotopu). Nadal obowiązuje więc klasyczna definicja.
Kilogram jest masą międzynarodowego wzorca tej jednostki, przechowywanego w Międzynarodowym Biurze Miar i Wag pod Paryżem. Jednostka czasu - sekunda początkowo była definiowana w odniesieniu do średniej doby słonecznej, później zaś w odniesieniu do czasu trwania roku zwrotnikowego. Zgodnie z tendencją do wykorzystywania zjawisk atomowych obecnie sekundę odwzorowuje się za pomocą tak zwanego „wzorca cezowego", a definicja sekundy jest następująca.
Sekundajest czasem trwania 9 192 631 770 okresów promieniowania odpowiadającego przejściu między dwoma poziomami nadsubtelnymi stanu podstawowego atomu l33Cs (cezu 133).
15
Jednostka natężenia prądu - amper jest definiowana w oparciu o prawo Ampe-re'a dotyczące wzajemnego oddziaływania dwóch przewodów wiodących prąd. Amper Jest natężeniem prądu elektrycznego, nie ulegającego żadnym zmianom, który - pfynąc w dwóch przewodach równoległych, prostoliniowych, nieskończenie długich, o przekroju kołowym znikomo małym, umieszczonych w próżni w odległości Im od siebie - wytwarza miedzy tymi przewodami silę 2-10~7Nna każdy metr długości przewodu.
Praktyczna realizacja tak zdefiniowanego wzorca jest niemożliwa. Do odwzorowania wzorca ampera wykorzystuje się tzw. „wagą prądową", w której do wytworzenia siły powodującej wychylenie belki wagi wykorzystuje się wzajemne oddziaływanie dwu połączonych szeregowo cewek (ruchomej i nieruchomej), przez które płynie prąd.
Jednostka temperatury - kelwin - jest definiowany jako jednostka termodynamicznej (rozpoczynającej się od zera bezwzględnego) skali temperatur.
Kelwin jest częścią temperatury termodynamicznej punktu potrój-
273,16
nego wody.
Punkt potrójny wody oznacza stan wody przy takich ciśnieniu i temperaturze, że występuje ona w trzech stanach: stałym, ciekłym i gazowym. Ten przypadek zachodzi przy temperaturze równej 273,16 K (0,01°C) i ciśnieniu równym 631,163N/m2.
Ponieważ kelwin jest równy stosowanemu dotąd stopniowi Celsjusza, dopuszczalne jest przejściowo stosownie skali Celsjusza.
Tę samą nazwę i oznaczenie stosuje się do wyrażania stanu temperatury jak i różnicy temperatury.
Jednostka światłości - kandela -do niedawna była realizowana za pomocą wzorca zbudowanego w oparciu o teoretyczne pojęcie „ciała doskonale czarnego", które całkowicie pochłania padające nań promieniowanie, zaś jako źródło promieniuje najintensywniej ze wszystkich ciał fizycznych. Obecna definicja kandeli jest następująca.
Kandela jest światłością, którą ma w określonym kierunku źródło emitujące promieniowanie monochromatyczne o częstotliwości 540-10I2Hz i którego
natężenie promieniowania jest równe W/sr.
Mol jako podstawowa jednostka układu SI, służąca do określenia ilości materii, został wprowadzony dopiero w 1971 roku, zaś jego definicja jest następująca.
16
Mol jest to liczność materii występująca, gdy liczba cząstek lub atomów jest równa liczbie atomów zawartych w masie 0,012kg czystego nuklidu węgla I2C.
Radian i steradian są jednostkami uzupełniającymi, zaś ich definicje są znane z geometrii.
Radian jest kątem płaskim o wierzchołku w środku koła, wycinającym z obwodu tego koła łuk o długości równej jego promieniowi. Steradian jest kątem bryłowym o wierzchołku w środku kuli, wycinającym z powierzchni tej kuli pole równe kwadratowi jej promienia. Za pomocą jednostek podstawowych i uzupełniających definiuje się. jednostki miar wszystkich wielkości pochodnych. Będą to tzw. jednostki pochodne. Definicje jednostek pochodnych nie mają urzędowych sformułowań słownych. Są one formułowane indywidualnie na podstawie równań definicyjnych określających związek między daną wielkością pochodną a wielkościami podstawowymi. Wykaz ważniejszych jednostek miar układu SI zestawiono w tabeli 1.1.
Międzynarodowy Układ Jednostek Miar jest układem uniwersalnym i spójnym.
Uniwersalność układu oznacza, że może on być stosowany zarówno we wszystkich dziedzinach nauki, jak i w technice. Jest to cecha pozwalająca wyeliminować bałagan i trudność współpracy, wynikające ze stosowania różnych układów jednostek miar, różnych nazw jednostek, różnych ich wymiarów i różnych oznaczeń. Koherentność układu, czyli spójność jednostek miar, oznacza, że wszystkie należące do układu główne jednostki miar mają w równaniach definicyjnych współczynnik liczbowy równy jedności (zob. Tabela 1.1). W innych .wcześniej stosowanych układach jednostek miar wartości tych współczynników liczbowych bywały różne. Spójność układu SI jest bardzo korzystna, upraszcza bowiem dokonywanie wszelkich obliczeń. W układzie SI określona wielkość ma jedną jednostkę miary, jedną nazwę tej jednostki, jeden symbol i jeden wymiar jednostki.
Wykaz ważniejszych jednostek miar w układzie SI
Tabela 1.1
L.p. |
Wielkość |
Nazwa jednostki miary |
Oznaczenie jednostki |
Definicje i relacje między jednostkami |
Wymiar w jednostkach podstawowych |
Uwagi |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
1 |
Długość |
metr |
m |
Metr jest to długość równa drodze, jaką przebywa światło w czasie równym 1/299792458 sekundy |
|
|
2 |
Masa |
kilogram |
kg |
Kilogram jest to masa międzynarodowego wzorca tej jednostki przechowywanego w Międzynarodowym Biurze Miar w Sevres. |
|
|
3 |
Czas |
sekunda |
s |
Sekunda jest to czas równy 9192631770 okresów promieniowania odpowiadającego przejściu między dwoma nadsubtemymi poziomami stanu podstawowego atomu I33Cs (cezu!33). |
|
|
4 |
Natężenie prądu elektrycznego |
amper |
A |
Amper jest to prąd elektryczny nie zmieniający się, który płynąc w dwóch równoległych prostoliniowych, nieskończenie długich przewodach o przekroju znikomo małym, umieszczonych w próżni w odległości Im (metr) od siebie - wywołałby między tymi przewodami siłę 2-10"7N (niuton) na każdy metr długości. |
|
Stosuje się również nazwę: prąd elektryczny |
5 |
Temperatura |
kelwin |
K |
Kelwin jest to 1/273,16 temperatury termodynamicznej punktu potrójnego wody. |
|
Dopuszcza się °C |
6 |
Liczność materii |
mol |
mol |
Mol jest to liczność materii występująca, gdy liczba cząstek jest równa liczbie atomów zawartych w masie 0,012 kg (kilogram) 12C (węgla 12). |
|
Stosowana jest również nazwa: ilość materii |
Tabela 1.1 cd
1 |
2 |
3 |
4 |
5 |
6 |
7 |
7 |
Światłość |
kandela |
cd |
Kandela jest światłością, którą ma w określonym kierunku źródło emitujące promieniowanie monochromatyczne o częstotliwości 540-1012Hz i którego natężenie promieniowania jest równe 1/683 W/sr |
|
|
8 |
Kąt płaski |
radian |
rad |
Radian jest to kąt płaski, zawarty między dwoma promieniami koła, wycinającym z jego okręgu łuk o długości równej promieniowi tego koła. |
|
|
9 |
Kąt bryłowy |
steradian |
sr |
Steradian jest to kąt bryłowy o wierzchołku w środku kuli, wycinający z jej powierzchni część równą powierzchni kwadratu o boku równym promieniowi tej kuli. |
|
|
10 |
Pole powierzchni |
metr kwadratowy |
m2 |
Metr kwadratowy jest to powierzchnia równa powierzchni kwadratu, którego bok ma długość Im (metr) |
Im2 |
|
11 |
Objętość |
metr sześcienny |
m3 |
Metr sześcienny jest to objętość równa objętości sześcianu, którego krawędź ma długość Im (metr) |
Im3 |
|
12 |
Częstotliwość |
herc |
Hz |
Herc jest to częstotliwość zjawiska okresowego, którego okres jest równy Is (sekunda). |
Is'1 |
|
13 |
Prędkość liniowa |
metr na sekundę |
m/s |
Metr na sekundę jest to prędkość liniowa, z jaką poruszający się punkt przebywa drogę o długości Im (metr) w czasie Is (sekunda) |
Im-s'1 |
|
14 |
Prędkość kątowa |
radian na sekundę |
rad/s |
Radian na sekundę jest to prędkość kątowa, z jaką poruszający się po okręgu koła punkt zakreśla łuk odpowiadający Irad (radian) w czasie Is (sekunda). |
ls-'-rad |
|
15 |
Przyspieszenie liniowe |
metr na kwadrat sekundy |
m/s2 |
Metr na kwadrat sekundy jest to przyspieszenie liniowe, przy którym prędkość liniowa zmienia się o Im/s (metr na sekundę) w czasie Is (sekunda) |
Im-s'2 |
|
Tabela 1.1 cd
1 |
2 |
3 |
4 |
5 |
6 |
7 |
16 |
Przyspieszenie kątowe |
radian na kwadrat sekundy |
rad/s2 |
Radian na kwadrat sekundy jest to przyspieszenie kątowe, przy którym prędkość kątowa zmienia się o 1 rad/s (radian na sekundę) w czasie Is (sekunda). |
ls-2-rad |
|
17 |
Gęstość (masy) |
kilogram na metr sześcienny |
kg/mj |
Kilogram na metr sześcienny jest to gęstość ciała mającego masę Ikg (kilogram) i objętość Im3 (metr sześcienny). |
lm-3-kg |
|
18 |
Pęd |
kilogram o-metr na sekundę |
kg-m/s |
Kilogramometr na sekundę jest to pęd ciała o masie Ikg (kilogram) poruszającego się z prędkością Im/s ( metr na sekund e). |
Im-kg-s"' |
|
19 |
Siła |
niuton |
N |
Niuton jest to siła, która w kierunku jej działania nadaje masie Ikg (kilogram) przyspieszenie Im/s2 |
lm-kg-s"2 |
|
20 |
Moment siły |
niutonometr |
N-m |
Niutonometr jest to moment siły IN (niuton) względem punktu położonego w odległości Im (metr) od kierunku działania tej siły. |
Im2-kg-s-2 |
|
21 |
Ciśnienie |
paskal |
Pa |
Paskal jest to ciśnienie występujące na powierzchni płaskiej Im2 ( metr kwadratowy), na którą działa prostopadle siła IN (niuton). |
lm-'-kg-s-2 |
N/m2 |
22 |
Energia, praca |
dżul |
J |
Dżul jest to energia równa pracy wykonanej przez siłę IN (niuton) w kierunku jej działania, na drodze o długości Im {metr). |
Im2-kg-s-2 |
N-m |
23 |
Moc |
wat |
W |
Wat jest to moc, przy której praca U (dżul) wykonana jest w czasie Is (sekunda). |
Im2-kg-s-3 |
J/s |
24 |
Gęstość mocy |
wat na metr kwadratowy |
W/m2 |
Wat na metr kwadratowy jest to gęstość mocy występująca, gdy moc 1W (wat) przypada na powierzchnię Im2 (metr kwadratowy). |
Ikg-s'3 |
|
Tabela 1.1 cd
1 |
2 |
3 |
4 |
5 |
6 |
7 |
25 |
Gęstość prądu elektrycznego |
amper na metr kwadratowy |
A/m2 |
Amper na metr kwadratowy jest to gęstość prądu elektrycznego występująca, gdy prąd 1A (amper) rozkłada się równomiernie na powierzchni Im2 (metr kwadratowy), prostopadłej do kierunku tej gęstości elektrycznej. |
lm'2-A |
|
26 |
Ładunek elektryczny |
kulomb |
C |
Kulomb jest to ładunek elektryczny przepływający w czasie Is (sekunda) przez powierzchnię, gdy prąd elektryczny płynący przez tę powierzchnię wynosi 1A (amper). |
ls-A |
|
27 |
Napięcie elektryczne, różnica potencjałów, siła elektromotoryczna |
wolt |
V |
Wolt jest to napięcie elektryczne występujące między dwiema powierzchniami ekwipotencjalnymi jednorodnego przewodu prostoliniowego, w którym płynie nie zmieniający się prąd 1A (amper), a moc między tymi powierzchniami jest równa 1 W (wat). |
lmz-kg-s'3-A° |
W/A |
28 |
Natężenie pola elektrycznego |
wolt na metr |
V/m |
Wolt na metr jest to natężenie równomiernego pola elektrycznego, w którym różnica potencjałów między dwiema płaszczyznami ekwipotencjalnymi odległymi od siebie o Im (metr) wynosi IV (wolt). |
Im-kg-s'3- A'1 |
|
29 |
Indukcja elektryczna |
kulomb na metr kwadratowy |
C/m2 |
Kulomb na metr kwadratowy jest to indukcja elektryczna, przy której na powierzchni przewodnika równej Im2 ( metr kwadratowy), prostopadłej do linii pola elektrycznego, indukuje się ładunek elektryczny 1C (kulomb). |
lnT2-s-A |
|
30 |
Pojemność elektryczna |
farad |
F |
Farad jest to pojemność elektryczna, jaką ma kondensator, w którym między elektrodami występuje napięcie elektryczne IV (wolt), gdy znajdują się na nich różno-imienne ładunki o wartości 1C (kulomb) każdy. |
lm-2.kg-'s4-A2 |
C/V |
to
o
Tabela 1.1 cd
1 |
2 |
3 |
4 |
5 |
6 |
7 |
,31 |
Przenikal-ność dielektryczna |
Paradna metr |
F/m |
Parad na metr jest to przenikalność dielektryczna (bezwzględna) środowiska izotropowego, w którym polu elektrycznemu odpowiada indukcja elektryczna IC/m2 (kulomb na metr kwadratowy). |
Im^-kg-tf-A2 |
|
32 |
Opór elektryczny, (rezystancja, reak-tancja, im-pedancja) |
om |
n |
Om jest to opór elektryczny między dwiema powierzchniami ekwipotencjalnymi przewodu jednorodnego prostoliniowego, gdy niezmienne napięcie elektryczne IV (wolt) występujące między tymi powierzchniami wywołuje w tym przewodzie prąd elektryczny 1 A (amper). |
lm2-kg-s-3-A'2 |
V/A |
33 |
Rezystyw-ność, opór elektryczny właściwy |
omometr |
n-m |
Omometr jest to rezystywność jednorodnego przewodnika, gdy wykonany z niego przewód o przekroju poprzecznym Im2 ( metr kwadratowy) i długości Im (metr) ma opór elektryczny 1Q (om) |
Im3-kg- s'3 -A'2 |
|
34 |
Przewodność elektryczna |
simens |
s |
Simens jest to przewodność elektryczna przewodu o oporze Ifł (om). |
Im-^g-^-A2 |
i/n |
35 |
Konduk-tywność |
simens na metr |
S/m |
Simens na metr jest to konduktywność przewodnika jednorodnego o rezystywności Iftm ( omometr) |
lm-3-kg-'s3-A2 |
l/ttm |
36 |
Strumień magnetyczny |
weber |
Wb |
Weber jest to strumień magnetyczny, który malejąc jednostajnie do zera w czasie Is (sekunda) indukuje siłę elektromotorycznąlY (wolt) w obejmującym ten strumień magnetyczny obwodzie zamkniętym jednozwojo-wym wykonanym z przewodu o przekroju kołowym znikomo małym. |
lm2-kg-s°-A-1 |
V-s |
K> K)
Tabela 1.1 cd
1 |
2 |
3 |
4 |
5 |
6 |
7 |
37 |
Indukcja magnetyczna |
tesla |
T |
Tesla jest to indukcja magnetyczna pola magnetycznego równomiernego, przy której na przekrój poprzeczny Im2 (metr kwadratowy) przypada strumień magnetyczny lWb(weber). |
lkg-s-2.A-' |
Wb/m2 104Gs |
38 |
Natężenie pola magnetycznego |
amperna metr |
A/m |
Amper na metr jest to natężenie pola magnetycznego, jakie występuje na powierzchni bocznej walca kołowego o obwodzie Im (metr), stycznie do powierzchni bocznej tego walca i prostopadle do jego tworzącej, gdy przez znajdujący się w osi tego walca przewód prostoliniowy nieskończenie długi o przekroju znikomo małym płynie nie zmieniający się prąd 1 A (amper). |
lm-'-A |
|
39 |
Indukcyj-ność |
henr |
H |
Henr jest to indukcyjność obwodu, w którym indukuje się siła elektromotoryczna IV (wolt), gdy prąd elektryczny płynący w tym obwodzie zmienia się jednostajnie o 1 A (amper) w czasie Is (sekunda). |
lmz-kg-s-2-A-2 |
Vs/A |
40 |
Przenikal-ność magnetyczna |
henr na metr |
H/m |
Henr na metr jest to przenikalność magnetyczna (bezwzględna) środowiska izotropowego, w którym polu magnetycznemu lA/m (amper na metr) odpowiada indukcja magnetyczna 1T (tesla). |
Ira-kg- s'2-A-2 |
Tm/A |
41 |
Siła ma-gnetomoto-ryczna |
amper |
A |
Amper jest to siła magnetomotoryczna występująca wzdłuż dowolnej krzywej zamkniętej stanowiącej brzeg powierzchni, gdy przez tę powierzchnię przenika jeden przewód z nie zmieniającym się prądem 1 A (amper). |
1A |
|
Tabela 1.1 cd
1 |
2 |
3 |
4 |
5 |
6 |
' 7 |
42 |
Strumień świetlny |
lumen |
Im |
Lumen jest to strumień świetlny wysyłany w kącie bryłowym Isr (steradian) przez punktowe źródło światła o światłości Icd (kandela) |
lcd-sr |
|
43 |
Natężenie oświetlenia |
luks |
lx |
Luks jest to natężenie oświetlenia wytworzone przez strumień świetlny llm (lumen) na powierzchni Im2 (metr kwadratowy). |
lm"2-cd-sr |
Im/m2 |
44 |
Luminancja |
kandela na metr kwadratowy |
cd/m2 |
Kandela na metr kwadratowy jest to luminancja powierzchni Im2 (metr kwadratowy), której światłość w kierunku prostopadłym do tej powierzchni jest równa Icd (kandela). |
lm"2-cd |
|
24
Jeśli jednostki główne są zbyt duże lub zbyt małe do określenia w prosty sposób jakiejś wielkości, stosuje się dziesiętne wielokrotności lub podwielokrotności tych jednostek. Są one zapisywane za pomocą przedrostków przed nazwą jednostki (por. Tabela 1.2).
Przedrostki oznaczające krotność jednostek miar Tabela 1.2
Przedrostek |
Oznaczenie |
Krotność |
eksa |
E |
1018 |
peta |
P |
1015 |
tera |
T |
1012 |
giga |
G |
109 |
mega |
M |
106 |
kilo |
k |
103 |
hekto |
h |
102 |
deka |
da |
10' |
decy |
d |
itr1 |
centy |
c |
io-2 |
mili |
m |
lO'3 |
mikro |
u |
1(T6 |
nano |
n |
io-9 |
piko |
P |
lO'12 |
femto |
f |
io-15 |
atto |
a |
io-18 |
2
WZORCE JEDNOSTEK MIAR
2.1.WIADOMOŚCI OGÓLNE
2.1.1. Definicje
Wzorce jednostek miar są to narzędzia pomiarowe lub układy pomiarowe przeznaczone do zdefiniowania, zrealizowania, zachowania lub odtworzenia jednostki miary lub jej wielokrotności.
Zbiór wzorców miary, które poprzez ich wspólne zastosowanie tworzą wzorzec jednostki miary, jest nazywany wzorcem zespołowym jednostki miary.
Zbiór wzorców jednostki miary o wybranych wartościach, które indywidualnie lub dzięki kombinacji dostarczają szeregu wartości tego samego rodzaju, jest nazywany wzorcem grupowym jednostki miary.
Wzorzec jednostki miary uznany umową międzynarodową za podstawę do przypisywania wartości innym wzorcom jednostki danej wielkości jest nazywany wzorcem międzynarodowym.
Wzorzec jednostki miary uznany urzędowo w danym kraju za podstawę do przypisywania wartości innym wzorcom jednostki miary danej wielkości jest nazywany wzorcem państwowym.
Wzorzec jednostki miary, który jest ustalony lub powszechnie uznany jako charakteryzujący się najwyższą jakością metrologiczną i którego wartość jest przyjęta bez odniesienia do innych wzorców miary tej samej wielkości jest nazywany wzorcem pierwotnym.
Wzorzec jednostki miary, którego wartość jest uzyskana przez porównanie z wzorcem pierwotnym jednostki miary tej samej wielkości jest nazywany wzorcem wtórnym.
Wzorzec odniesienia jest to wzorzec jednostki miary o najwyższej jakości metrologicznej w danym miejscu lub danej organizacji, który stanowi odniesienie dla wykonywanych tam pomiarów.
Wzorzec roboczy jest to wzorzec jednostki miary używany do wzorcowania lub sprawdzania przyrządów pomiarowych.
26
2.1.2. Hierarchia wzorców
Odtworzenie wartości jednostki miary danej wielkości odbywa się za pomocą odpowiednich narządzi pomiarowych oraz według ustalonych procedur nazywanych systemami sprawdzań narządzi pomiarowych. Systemy te są opisane prawnie ustalonymi dokumentami.
W zależności od roli jaką pełnią wzorce w procesach pomiarowych tworzą one swoistą piramidę hierarchiczną. Zasady tworzenia tej piramidy wzorców w Polsce pokazano na rysunku 2.1.
Na wierzchołku tej piramidy znajdują się cztery wzorce o najwyższej dokładności: podstawowy, świadek, odniesienia i porównania.
Wzorzec podstawowy jest najczęściej wzorcem zespołowym, składającym się z kilku do kilkunastu wzorców. Jego wartość określa się jako średnią wartość miar wzorców wchodzących w skład zespołu. Wartość wzorca podstawowego ustala się w wyniku porównań z wzorcem międzynarodowym,, np. w Międzynarodowym Biurze Wag i Miar (BIPM -Bureau Internationale des Poids et Measu-res) w Sevres.
Wzorzec świadek służy do kontroli stałości wzorca podstawowego lub zastąpienia go w przypadku uszkodzenia. Jego właściwości metrologiczne nie są gorsze niż właściwości wzorca podstawowego. Wzorca świadka nie używa się do innych bieżących zadań metrologicznych, nawet do sprawdzania innych wzorców Przez porównanie z wzorcem podstawowym wyznacza się wartości wzorców odniesienia i porównania..
Wzorzec odniesienia służy do porównywania z wzorcami niższego rzędu piramidy .
Wzorzec porównania służy do komparacji międzynarodowych oraz kompara-cji z innymi wzorcami, które nie mogą być bezpośrednio porównywane. Te cztery wzorce tworzą Państwowy wzorzec jednostki miary danej wielkości i jednocześnie pierwszy poziom schematu przekazywania jednostki miary. Wzorce te znajdują się w Głównym Urzędzie Miar (GUM) w Warszawie. Na drugim poziomie są wzorce I-rzędu, które znajdują się w GUM oraz Okręgowych Urzędach Miar (OUM).
Trzeci poziom obejmuje wzorce H-rzędu znajdujące się w Okręgowych i Obwodowych Urzędach Miar oraz w Laboratoriach Upoważnionych. Z wzorcami tymi porównywane są wzorce i narzędzia pomiarowe znajdujące się u użytkowników. Wzorce użytkowe biorą bezpośredni udział w procesach pomiarowych.
27
BIPM
Wzorzec podstawowy
I GUM
_L
Wzorzec porównania
Wzorzec odniesienia
Wzorzec świadek
Wzorzec I-rzędu
II GUM OUM
Wzorzec Il-rzędu
III GUM OUM Lab.upoważ
Wzorce niższych rzędów oraz narzędzia użytkowe
Rys.2.1. Układ sprawdzeń wzorców jednostki miary
Wymagania
Wymagania stawiane wzorcom jednostek miar:
niezmienność w czasie,
duża dokładność,
łatwa odtwarzalność,
łatwa porównywalność,
łatwość stosowania.
Parametry wzorca podawane na tabliczce znamionowej lub jego metryce:
nominalna miara wzorca,
niedokładność miary wzorca,
okres zachowania niedokładności miary wzorca,
warunki, w których miara i dokładności są zachowane.
W technice pomiarów wielkości elektrycznych, z największą precyzją odtwarzane są jednostki miary następujących wielkości:
siły elektromotorycznej (napięcia),
rezystancji,
pojemności,
indukcyjności własnej i wzajemnej,
częstotliwości.
28
2.2. WZORCE SIŁY ELEKTROMOTORYCZNEJ I NAPIĘCIA
2.2.1. Ogniwo Westona
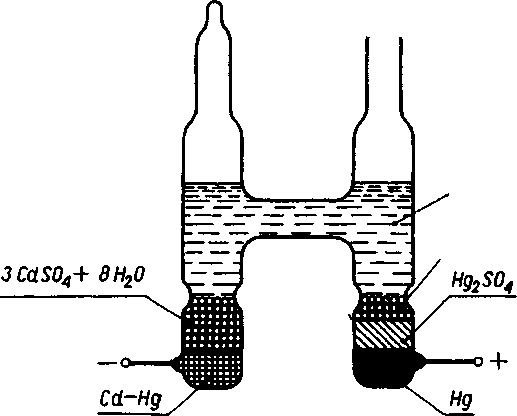
W Polsce wzorcami napięcia stałego (ściślej siły elektromotorycznej) są ogniwa chemiczne Westona. Budowane są dwa typy ogniw: nasycone i nienasycone. Budowę ogniwa nasyconego pokazano na rysunku 2.1.
CdSOj 3CdS04 + 8H20
A
Rys.2. l. Ogniwo Westona
Ogniwo nasycone Westona mieści się w szklanym naczyniu o kształcie zbliżonym do litery H. Elektrodami ogniwa są druty platynowe wtopione w ramiona naczynia. Biegunem dodatnim ogniwa jest rtęć (Hg), biegunem ujemnym - amalgamat kadmu (Cd-Hg). Elektrolitem jest nasycony wodny roztwór siarczanu kadmowego (CdSO4) z nadmiarem kryształów siarczanu kadmu (SCdSCU+SH^O). W całym zakresie użytkowym temperatury elektrolit jest roztworem nasyconym. Biegun dodatni jest pokryty pastą utworzoną z mieszaniny siarczanu kadmu (CdSO4) i siarczanu rtęci (Hg2SO4).Dla ochrony przed wpływem bezpośredniego działania słońca i strumieni ciepła oraz uszkodzeniami mechanicznymi, ogniwa
29
umieszcza się w obudowach wykonanych z masy plastycznej lub metalu. W obudowie ogniwa znajduje się gniazdo na termometr umożliwiający pomiar temperatury powietrza wewnątrz obudowy.
Wartość siły elektromotorycznej ogniwa wzorcowego jest zależna, od temperatury.
Dla ogniw nasyconych polska norma PN-80 E-06531 Ogniwa wzorcowe. Wymagania ogólne - podaje wzór pozwalający obliczyć tzw. wartość charakterystyczną siły elektromotorycznej ogniwa w temperaturze t różnej od temperatury znamionowej t|.
E = E,i+a(t-ti)+b(t-ti)2+c(t-tl)3 (2.1)
w którym: Et - wartość uwierzytelniona, czyli wartość rzeczywista siły
elektromotorycznej, podana w świadectwie sprawdzenia, ti - temperatura znamionowa, t - temperatura ogniwa, a, b, c - stałe, określone oddzielnie dla każdego ogniwa, podane
w świadectwie sprawdzenia.
Np. dla temperatur zawartych w przedziale od 10°C do 30°C, wartości współczynników a, b i c mogą mieć wartości jak we wzorze (2.2)
E, = E20 - 4,06 • 10'5 (t - 20)- 0,95 • 10"6 (t - 20)2 + 0,01 • 10"* (t - 2Qf (2.2)
gdzie: Et - siła elektromotoryczna ogniwa Westona w temperaturze t °C, E2o - siła elektromotoryczna ogniwa Westona w temperaturze 20°C.
Wartość uwierzytelniona siły elektromotorycznej w temperaturze równej +20°C wynosi od 1,018540V do 1,018730V, zależnie od jakości użytych materiałów.
Temperatura znamionowa ogniwa według normy powinna być wybrana z ciągu wartości: 20°C, 23°C, 25°C lub 28°C.
Wzór (2.1) jest słuszny dla przypadku, gdy „ramiona" ogniwa mają tę samą temperaturę. Ogniwo to ma dużą bezwładność cieplną i stała czasowa ogniwa jest duża, rzędu godzin, zatem wyrównywanie temperatury wszystkich jego elementów może trwać kilkanaście godzin. Z tego powodu z ogniw, które były narażone na zmiany temperatury, można korzystać dopiero po upływie 24 godzin. Okres karencji dotyczy również ogniw narażonych na wstrząsy np. w wyniku transportu.
Z ogniw wzorcowych nie należy pobierać, ani też przepuszczać prądu. Obciążalność ogniw wzorcowych jest bardzo mała. Dopuszczalny krótkotrwały prąd wynosi 1|JA. Dłuższe (już około l minuty) pobieranie prądu o wartości IpA po-
30
woduje odczuwalne zmniejszenie siły elektromotorycznej ogniwa Westona wskutek polaryzacji. Ogniwo odzyskuje właściwą wartość po kilkunastu minutach. Przypadkowe zwarcie ogniwa trwające do kilkunastu minut przeważnie nie powoduje trwałego uszkodzenia ogniwa, jednakże przed ponownym użyciem takie ogniwo musi być dokładnie sprawdzone. Pobór prądu o natężeniu większym od lOOfiA trwale uszkadza ogniwo.
Rezystancja wewnętrzna nasyconego ogniwa Westona jest rzędu lk£2. Celem uniknięcia przeciążeń należy dbać o to, by rezystancja obwodu, do którego włącza się ogniwo nie była mniejsza niż 9kQ.
Właściwości metrologiczne ogniwa są podstawą do zakwalifikowania go do określonej klasy dokładności. Według normy klasa dokładności to uogólniona charakterystyka ogniw wzorcowych o takiej samej niestabilności czasowej siły elektromotorycznej w czasie, określona po upływie jednego roku od daty pierwszego sprawdzenia podanej w świadectwie przy spełnieniu warunków przechowywania i użytkowania określonych w normie.
Dla ogniw nasyconych norma rozróżnia sześć klas dokładności oznaczonych symbolami:
0,0002; 0,0005; 0,001; 0,002; 0,005; 0,001
lub odpowiednio
2ppm; 5ppm; lOppm; 20ppm; 50ppm; lOOppm.
Liczba będąca wyróżnikiem klasy określa wartość dopuszczalnej rocznej zmiany siły elektromotorycznej ogniwa wyrażonej w procentach wartości nominalnej. Tak określona zmiana nosi nazwę błędu podstawowego ogniwa wzorcowego.
Definicja błędu podstawowego przybliża ideę oznaczania klasy dokładności za pomocą liter „ppm", które są skrótem od ang. „parts per milion", co w języku polskim oznacza: jedna milionowa (xlO~6).
Na obudowie ogniwa wzorcowego umieszcza się następujące dane: znak lub nazwa wytwórcy, typ ogniwa,
numer fabryczny, symbol klasy dokładności, biegunowość zacisków, znamionowa i dopuszczalna pozycja pracy.
Do każdego ogniwa wzorcowego dołącza się świadectwo zawierające następujące dane:
nazwa lub znak wytwórcy, nazwa i typ ogniwa, numer fabryczny,
31
rodzaj ogniwa (nasycone, nienasycone), symbol klasy dokładności, data sprawdzenia i znak kontroli technicznej,
wartość uwierzytelniona siły elektromotorycznej wraz z niepewnością pomiaru,
temperatura znamionowa,
wartości stałych a, b, c ze wzoru 2. l dla ogniw nasyconych, rezystancja wewnętrzna dla prądu stałego w temperaturze znamionowej. Ogniwa wzorcowe powinny być przechowywane w temperaturze mieszczącej się w granicach od 4°C do 40°C.
Źródłem wzorcowego napięcia stałego, niewrażliwym na wstrząsy i wibracje jest ogniwo nienasycone Westona. Elektrolit tego ogniwa jest nienasycony (brak kryształków siarczanu kadmu). Dzięki wkładkom ceramicznym, utrzymującym chemikalia we właściwym miejscu, ogniwo to dobrze spełnia rolę wzorca w urządzeniach przenośnych.
Uwierzytelniona wartość siły elektromotorycznej tego typu ogniw zawiera się w granicach od l,01882 V do 1,01902V w temperaturze 20°C.
Ogniwa nienasycone budowane są w czterech klasach dokładności
0,002; 0,005; 0,01; 0,02 lub
20ppm; 50ppm; lOOppm; 200ppm
Zmiana siły elektromotorycznej ogniwa nienasyconego wraz z temperaturą nie powinna przekraczać 10jiV/0C dla temperatur od 4°C do 10°C oraz 5)iV/0C dla temperatur powyżej 10°C do 40°C.
Zaletą ogniw nienasyconych jest mała rezystancja wewnętrzna - rzędu 600Q oraz duży dopuszczalny prąd lOOpiA.
Grupowy wzorzec SEM
Jak widać, wymagania stawiane wzorcom jednostek miar lepiej spełniają ogniwa Westona nasycone, dlatego właśnie ogniwa nasycone tworzą Państwowy wzorzec siły elektromotorycznej i napięcia stałego, w skład którego wchodzą: wzorzec podstawowy, wzorzec porównania, wzorzec odniesienia i wzorzec świadek (zob. rysunek 2.1).
Wzorzec podstawowy jest wzorcem grupowym (zespołowym) składającym się z grupy 12 ogniw nasyconych, utrzymywanych w stałej temperaturze równej 20°C±0,001°C. Są to ogniwa przechowywane w specjalnych warunkach już od
32
momentu wyprodukowania, tak aby uniknąć wpływu zjawiska histerezy. Zjawisko to polega na tym, że wartość SEM ogniwa poddanego zmianom temperatury, wstrząsom nie wraca do uprzedniej wartości.
Jako wartość wzorca jednostki SEM przyjmuje się średnią arytmetyczną wartości sił elektromotorycznych wszystkich ogniw wchodzących w skład grupy. Wartość SEM wzorca ustala się w wyniku porównań w Międzynarodowym Biurze Miar i Wag (BIPM) w Sevres, gdzie jej wartość jest odniesiona do wartości ustalonej w oparciu o efekt Josephsona.
Wzorce I-rzędu stanowią pojedyncze ogniwa nasycone Westona.
2.2.2. Źródła wzorcowe wykorzystujące efekt Josephsona
Podstawową wadą ogniw Westona jako wzorców jest to, że są wzorcami sztucznymi, których właściwości zależą od użytych materiałów i technologii wykonania. Ponadto ich parametry silnie zależą od wpływu warunków otoczenia, a przede wszystkim zmian temperatury i przyspieszeń. Dlatego dąży się do zdefiniowania jednostki napięcia na podstawie zjawisk molekularnych jako powszechnych, praktycznie niezmiennych i prawie nie podlegających wpływom zmian warunków otoczenia. W tym celu prowadzone są intensywne prace nad wykorzystaniem właściwości złącza Josephsona.
Złącze Josephsona składa się z dwóch nadprzewodników rozdzielonych cienką warstwą dielektryka (l-s-2)nm. W temperaturze ciekłego helu 4,2K przez warstwę dielektryczną może przepływać prąd (tzw. prąd tunelowy), będący sumą prądu pojedynczych elektronów i elektronów związanych w pary. Prąd par elektronowych i jego oddziaływanie z zewnętrznymi wymuszeniami nadaje złączu wiele interesujących właściwości.
Stałoprądowy efekt Josephsona polega na tym, że przez złącze może przepływać prąd stały o wartości mniejszej od pewnej wartości krytycznej Ik nie wywołując spadku napięcia na złączu.
Przemiennoprądowy wewnętrzny efekt Josephsona występuje w przypadku umieszczenia złącza spolaryzowanego prądem stałym o wartości większej od wartości krytycznej w słabym (ImT) stałym polu magnetycznym. Wówczas przez złącze, oprócz prądu stałego, płynie również prąd przemienny o częstotliwości zależnej od napięcia U polaryzującego złącze zgodnie z zależnością
(2.3)
w której: e - ładunek elektronu, h - stała Plancka.
33
Szczególnie interesujący z punktu widzenia przydatności złącza do budowy wzorców napięcia jest przemiennoprądowy zewnętrzny efekt Josephsona. Efekt ten występuje po umieszczeniu złącza w polu elektromagnetycznym wielkiej częstotliwości f$. W tym przypadku charakterystyka prądowo-napięciowa złącza przybiera kształt schodkowy. Skok prądu występuje przy napięciu U„ spełniającym zależność
*tf,=¥-Vn (2-4)
w której: «-kolejny numer schodka.
n=l
U, U2 U3 U4
Rys.2.3. Charakterystyka prądowo-napięciowa złącza Josephsona.
Ostatnia zależność wiąże częstotliwość pola elektromagnetycznego fs z napięciem przez stosunek stałych fizycznych e i h. Związek wyrażony równaniem (2.4) jest niezależny od rodzaju nadprzewodnika i dielektryka, od temperatury, od natężenia i intensywności pola magnetycznego. Jest to bardzo istotna cecha tego zjawiska, która predestynuje je do wykorzystania w charakterze wzorca napięcia. Z porównania napięcia U„ z napięciem wzorca (przy znanej częstotliwości) można wyznaczyć stosunek 2e/h i odwrotnie - przy założeniu, że 2e/h ma wartość wyznaczoną z dostateczną dokładnością lub też podaną arbitralnie, złącze można zastosować do odtworzenia i kontroli istniejących wzorców napięcia. Decyzją Międzynarodowego Komitetu Miar i Wag (1.01.1990r.) arbitralnie przyjęto, że:
2e/h=483597,9109Hz/V.
Ponieważ częstotliwość fs można zmierzyć stosunkowo łatwo z błędem rzędu 10"8%, istnieje więc możliwość bardzo dokładnego porównania „napięcia schód-
34
kowego" U„ z SEM wzorców i wyznaczenia ich zmienności czasowej. Ponadto istnieje możliwość wykorzystania efektu Josephsona do odtwarzania jednostki napięcia. Np. łącząc szeregowo 500 złącz Josephsona można uzyskać napięcie równe 10mV. Zaletą takiego wzorca podstawowego byłaby nie tylko dokładność i stabilność, lecz także to, że byłby on wzorcem absolutnym, tj. wzorcem, którego wartości uzyskane w różnych laboratoriach byłyby jednakowe. Wymagałoby to j ednak zmiany defmicj i j ednostki napięcia.
Stosowanie wzorców ze złączem Josephsona wymaga pokonania trudności technologicznych samego złącza jak również problemów związanych z utrzymywaniem złącza w temperaturze ok. 4,2K, w której występuje zjawisko nadprzewodnictwa materiałów złącza, np. stopów niobowo-ołowianych. Także eliminacja sił termoelektrycznych występujących przy tak dużej różnicy temperatur między złączem a otoczeniem , a w szczególności sprawdzanym źródłem, wymaga zastosowania odpowiednich środków zaradczych.
Zgodnie z międzynarodowymi zaleceniami wzorce ze złączami Josephsona są coraz szerzej stosowane w laboratoriach Narodowych Biur Miar.
Rys.2.4. Schemat blokowy stanowiska pomiarowego wzorca napięcia ze złączem Josephsona.
Od 1998 roku w Głównym Urzędzie Miar jako wzorzec najwyższego rzędu jednostki miary napięcia elektrycznego wykorzystuje się stanowisko pomiarowe ze złączem Josephsona oraz grupowym wzorcem z diodami Zenera. Uproszczony schemat stanowiska pomiarowego pokazano na rysunku 2.4.
35
Stanowisko pomiarowe wzorca napięcia przedstawione na rysunku 2.4 składa się z następujących podzespołów: naczynia Dewara z ciekłym helem, sondy kriogenicznej ze złączem Josephsona, falowodem i układem mikrofalowym, oscyloskopu, licznika synchronizującego sterowanego sygnałem zewnętrznej podstawy czasu wzorcowego zegara cezowego, dwóch zestawów wzorców wtórnych oraz komputera z oprogramowaniem NISTYolt.
Znamionowe napięcie wzorca Josephsona jest równe 10V, wzorców wtórnych 10V i 1,018V, a częstotliwość układu mikrofalowego ustalana jest z zakresu (74-77) GHz.
Napięcie we wzorcu Josephsona jest wytwarzane w strukturze około 20 tysięcy złącz półprzewodnikowych Nb/Al2O3/Nb z dielektrykiem SiOa. Struktura złącz poddawana jest w temperaturze ciekłego helu (4,2K) działaniu promieniowania pola elektromagnetycznego o częstotliwości około 75GHz. Promieniowanie to jest wytwarzane w generatorze z diodą Gunn'a. Częstotliwość jest mierzona licznikiem częstotliwości wysterowanym cezowym wzorcem częstotliwości lOMHz.
W układzie tym uzyskuje się napięcia wzorcowe z zakresu (-10 •*• +10)V. Jednostka napięcia przekazywana jest wzorcom wtórnym, którymi są wzorce zbudowane na diodach Zenera produkcji firmy Fluke. Jako metodę pomiarową stosuje się szeregowe przeciwsobne połączenie obu wzorców (Josephsona i Fluke 734A) i pomiar różnicy napięć za pomocą woltomierza cyfrowego.
Stanowisko pomiarowe jest sterowane komputerowo. Program komputerowy NISTYolt umożliwia wykonywanie piętnastu operacji niezbędnych przy stosowaniu wzorca. Wyniki pomiarów są podawane w postaci tabel i wykresów oraz mogą być drukowane w postaci formalnego raportu.
Według [15] niepewność standardowa względna odtworzenia jednostki napięcia elektrycznego za pomocą wzorca Josephsona nie przekracza wartości 210"9 i wynika z niepewności odtwarzania częstotliwości, natomiast niepewność standardowa względna przekazania jednostki wzorcom wtórnym nie przekracza wartości l O"7.
Opisane stanowisko pomiarowe jest produkcji firmy RMC.
2.2.3. Elektroniczne wzorce napięcia stałego
Ogniwo Westona jako źródło napięcia wzorcowego jest mało praktyczne. Mała wartość SEM, niemożność obciążania prądem, delikatna budowa - to wady, które powodują, że coraz częściej jako wzorce użytkowe stosuje się elektroniczne źródła napięcia stałego z diodami Zenera.
36
Dioda krzemowa Zenera jest złączem półprzewodnikowym typu p-n o charakterystyce prądowo-napięciowej jak na rysunku 2.5.
I
AUZ
U
AIZ
Rys.2.5. Charakterystyka prądowo-napięciowa diody Zenera.
Dla napięć i prądów dodatnich charakterystyka prądowo-napięciowa jest podobna do charakterystyki zwykłej diody krzemowej. Dla napięć i prądów ujemnych charakterystyka gwałtownie załamuje się przy pewnej wartości napięcia, zwanej napięciem Zenera (Uz). Wartość tego napięcia zależy od typu diody i wynosi zwykle od ok. 3V do 27V. W obszarze załamywania się charakterystyki następuje szybki wzrost prądu płynącego przez diodę przy prawie niezmienionym napięciu. Właściwość tę wykorzystuje się do stabilizacji napięcia. Ważnymi parametrami diod Zenera są: współczynnik stabilizacji Sd, rezystancja dynamiczna Rj i współczynnik temperaturowy napięcia stabilizacji (xt.
Współczynnik stabilizacji wyraża stosunek względnych zmian prądu płynącego przez diodę do wywołanych przez nie względnych zmian spadku napięcia na diodzie
37
A/,
(2.5)
u,
Dla typowych diod współczynnik ten wynosi ok. 100.
Rezystancja dynamiczna jest to rezystancja dla prądu zmiennego, diody wy-sterowanej prądem stałym o wartości Iz, obliczana według wzoru (2.6)
R -d ~
(2.6)
Rezystancja ta zależy od wartości napięcia Zenera, zależnej od typu diody i od wartości prądu stabilizacji czyli od punktu pracy. Wartość rezystancji dynamicznej wynosi od kilku do kilkudziesięciu omów. Minimalną rezystancję dynamiczną mają diody o napięciu Zenera równym Uz=(6-s-8)V.
Współczynnik temperaturowy napięcia jest zdefiniowany wzorem (2.7).
<xr =
l At/2 U7 AT
•//z=c
(2.7)
Współczynnik ten zależy od napięcia Zenera.. Ma on wartość ujemną dla diod o UZ<5V, a dodatnią dla diod UZ>7V. Diody o napięciu Zenera Uz=(5-*-7)V mają współczynnik cct bliski zeru.
pc']
S-KT1
10
30
Rys.2.6. Zależność współczynnika temperaturowego od napięcia Zenera
38
Prosty układ wzorcowego źródła napięcia stałego z diodami Zenera przedstawiono na rysunku (2.7).
-H*
uwe 3
o 1
R2 R3
+ -O
D4
Rys.2.7. Schemat wzorcowego źródła napięcia stałego z diodami Zenera
Napięcie przemienne z transformatora zasilającego jest prostowane przez diody di i Dj, a następnie filtrowane przez filtr składający się z opornika ri i kondensatora d. Oporniki R], R2 i rs ograniczają prąd płynący przez diody Zenera ds i D4. Przy wzroście napięcia sieci zasilającej wzrasta prąd płynący przez oporniki ri i R2 oraz diodę ds, zaś napięcie na diodzie da utrzymuje się bez zmian. Dioda D4 powinna mieć możliwie mały współczynnik temperaturowy oct.
Parametrem charakteryzującym jakość elektronicznych źródeł napięcia wzorcowego jest współczynnik stabilizacji. Określa się go jako stosunek względnej zmiany napięcia wyjściowego do względnej zmiany napięcia wejściowego
A£7
wy
(2.8)
Dla przedstawionego układu przy odpowiednim doborze elementów współczynnik ten wynosi od 0,005 do 0,0005.
Na rysunku 2.8 przedstawiono układ wysokostabilnego źródła wzorcowego, wykorzystującego wzmacniacz operacyjny i diodę Zenera. Przy odpowiednim doborze elementów współczynnik stabilizacji tego źródła wynosi ok. l O"5. Układ ma zarówno ujemne, jak i dodatnie sprzężenie zwrotne. W chwili włączenia wzmacniacz pracuje z silnym sprzężeniem dodatnim, gdyż opornik R\ ma małą rezystancję, a rezystancja początkowa diody D jest duża. W wyniku tego sprzężenia, napięcie na diodzie szybko wzrasta do wartości Uz. Rezystancja dynamiczna diody jest wtedy mała i wartość sprzężenia dodatniego gwałtownie
39
maleje. W stanie ustalonym wartość napięcia wyjściowego źródła oblicza się z zależności (2.9)
TT _R2+R3
(2.9)
Rys.2.8. Schemat wzorcowego źródła napięcia stałego ze wzmacniaczem operacyjnym i diodą Zenera.
Prąd wyjściowy jest ograniczony wartością dopuszczalnego prądu wyjściowego wzmacniacza.
Wzorcowe źródła z diodami Zenera są budowane na różne napięcia znamionowe, o wartościach dostosowanych do parametrów układów pomiarowych, z którymi mają współpracować. Prąd wyjściowy (obciążalność prądowa) tych źródeł jest ograniczony tylko parametrami użytych elementów. Zaletą źródeł z diodami Zenera jest niewrażliwość na wstrząsy i wibracje, natomiast wadą tych źródeł-jako wzorców-jest stosunkowo mała stałość w czasie.
Obecnie na świecie wytwarza się półprzewodnikowe źródła napięcia o stabilności rocznej dla źródeł o wartości 1,018V około2ppm, a dla źródeł 10V -około l ppm. Źródła te ze względu na łatwość obsługi i przystosowanie do transportu są obecnie powszechnie wykorzystywane jako tzw. transfery. Transfery służą do przenoszenia wartości IV lub 10V ze źródeł ze złączami Josephsona na wzorce grupowe zbudowane z ogniw Westona. Również transfery są stosowane
40
w komparacjach międzynarodowych ( porównywanie wartości wzorców państwowych jednostki napięcia różnych krajów), a także przy porównywaniu wartości wolta otrzymywanych z różnych stanowisk wykorzystujących złącza Jose-phsona, których bezpośrednie porównanie jest praktycznie niemożliwe.
2.2.4. Kalibratory napięcia
Kalibratory napięcia stałego budowane są jako elektroniczne sterowane źródła napięcia stałego, w których wykorzystuje się właściwości wyselekcjonowanych diod Zenera. Umożliwiają one otrzymywanie żądanej wartości napięcia z określoną dokładnością bez konieczności mierzenia i ręcznego korygowania nastawień.
Budowane są jako wielozakresowe wzorce użytkowe - np. kalibrator firmy Siemens typu D2300 umożliwia nastawienie napięć w zakresie O-s-lOOOY w czterech podzakresach: 0-s-lV, O-IOY, 0-s-100V i (MOOOY, w stopniach co 0,0001 wartości podzakresu. Dopuszczalny pobór prądu dla zakresu pierwszego i drugiego wynosi lOOmA, dla trzeciego lOmA, dla czwartego zaś ImA. Błąd podstawowy kalibratora nie przekracza ±0,008%.
Produkowany w kraju kalibrator typu SQ12 firmy Lumel umożliwia nastawianie napięć w zakresie 0-s-lOY w czterech podzakresach 0-*-10mV, O-s-lOOmY, 0-s-lY i O*l OV, w stopniach co 0,0001 wartości podzakresu. Maksymalne obciążenie prądowe dla wszystkich podzakresów wynosi lOOmA.
Schemat strukturalny kalibratora przedstawiono na rysunku 2.9.
Ri U
wy
Rys.2.9. Schemat strukturalny kalibratora napięcia
Żądana wartość napięcia wyjściowego Uwy jest programowana na przełącznikach bloku nastawy (BN). W zależności od ich położeń wielodekadowy przetwornik cyfrowo-analogowy (C/A) generuje odpowiednie napięcie wzorcowe,
41
które jest podawane na jedno z wejść komparatora (K). Do drugiego z wejść komparatora jest doprowadzone napięcie sprzężenia zwrotnego. Napięcie sprzężenia zwrotnego jest częścią napięcia wyjściowego (dzielnik napięcia ri, R2). Sygnał wyjściowy z komparatora, tzw. sygnał błędu steruje wzmocnieniem wzmacniacza mocy (W) przez regulator (Reg) i separator transoptorowy (S). Błąd podstawowy tego wzorca nie przekracza: ±(0,02% wartości nastawionej +0,005% wartości zakresu +5nV).
Budowane są również precyzyjne kalibratory napięcia przemiennego. Zwykle wykonywane jako uniwersalne, wielofunkcyjne i wielozakresowe wzorce napięć stałych i przemiennych o różnych zakresach częstotliwości. Do czołowych firm produkujących te kalibratory należą J. Fluke, Hewlett-Packard, Siemens, Datron i Lumel.
2.3. WZORCE REZYSTANCJI
Wzorcami rezystancji są bardzo starannie wykonane i dokładnie wywzorco-wane oporniki z drutów i taśm rezystancyjnych. Materiał oporowy z którego wykonuje się wzorce powinien się charakteryzować poniższymi właściwościami:
duża rezystywność;
mały współczynnik temperaturowy,
mała siła termoelektryczna w styku z miedzią,
stałość oporu w czasie,
duża wytrzymałość mechaniczna i cieplna.
Materiałami spełniającymi te wymagania są stopy miedzi, znane pod nazwami handlowymi manganin i nikrothal. Ich parametry elektryczne są następujące:
manganin nikrothal
współczynnik temperaturowy <2-10"5K"' < 1-lO^K"1
rezystancji
rezystywność ok. 43-10~8Qm ok. 133-10'8Qm
napięcie termoelektryczne ok. l^Y/K ok. 2jiV/K
w/m miedzi
Dla zapewnienia stałości rezystancji w czasie przeprowadza się sztuczne lub naturalne starzenie materiału oporowego. Starzenie sztuczne polega na wygrzewaniu materiału przez kilkadziesiąt godzin w temperaturze (100-s-150)°C. Starzenie naturalne polega na wieloletnim przechowywaniu materiału w warunkach znamionowych. Starzenie naturalne jest czasochłonne, a więc kosztowne, jest ono
42
stosowane tylko dla materiałów przeznaczonych do wykonywania wzorców o największej dokładności.
Oporniki wzorcowe powinny mieć następujące właściwości:
dużą dokładność,
stałość rezystancji w czasie,
mała siła elektromotoryczna w styku z miedzią,
mała zależność rezystancji od częstotliwości,
kąt przesunięcia fazowego bliski zeru.
Ostanie dwa wymagania dotyczą wzorców pracujących w układach prądu przemiennego. Spełnienie tych wymagań zależy od konstrukcji opornika ponieważ przy prądzie przemiennym muszą być brane pod uwagę zjawisko naskórko-wości oraz wpływ resztkowych pojemności i indukcyjności. Naskórkowość zmniejsza czynny przekrój przewodu, a więc zwiększa wartość rezystancji wraz ze wzrostem częstotliwości. Natomiast wpływ resztkowych pojemności i indukcyjności powoduje, że schemat zastępczy opornika przy prądzie przemiennym ma postać pokazaną na rysunku 2.10.
Rys.2.10. Schemat zastępczy opornika przy prądzie przemiennym Impedancja układu przedstawionego na rysunku 2.10 jest równa
j
(R + j(OL)
7 jcoC
1
Z = ~ K
JW-L + -
./co -C
gdzie co jest pulsacją prądu przemiennego.
Kąt fazowy między prądem i napięciem oblicza się ze wzoru:
(2.10)
X co(L-/?2c)
= — = — i - i
tf R
(2.11)
43
Przydatność opornika w obwodach prądu przemiennego określa stalą czasowa t.
0)
R
(2.12)
Stała czasowa jest wyrażana w jednostkach czasu. Im mniejsza stała czasowa, tym lepszy jest opornik. Małą wartość stałej czasowej można uzyskać przez odpowiednie ukształtowanie elementu oporowego tak, aby indukcyjność i pojemność resztkowa były jak najmniejsze lub przez taki dobór tych wartości, aby spełniona była zależność (2.13).
L_ ~R
(2.13)
Zmniejszenie indukcyjności resztkowej można uzyskać stosując uzwojenie bifilarne. Przewód oporowy tworzy długą pętlę o małej powierzchni. Kierunki prądu w przewodach leżących obok siebie są przeciwne, tak jak pokazano na rysunku 2.11 a.
Rys.2.11. Sposoby nawijania oporników; a) nawinięcie bifilarne, b) nawinięcie Chaperona.
Przy nawinięciu bifilarnym opornik charakteryzuje się dużą pojemnością, dlatego ten sposób nawinięcia można stosować w opornikach o rezystancji mniejszej lub równej 100Q. W opornikach o większej rezystancji stosuje się uzwojenie Chaperona. Uzwojenie to jest nawinięte w kilku sekcjach na korpusie w kształcie walca, (rysunek 2.11.b). Każda sekcja ma dwie warstwy zwojów, przy czym górna warstwa jest nawinięta w kierunku przeciwnym niż dolna, tak że strumienie magnetyczne prądów płynących przez opornik znoszą się. W praktyce stosuje się jeszcze inne rodzaje uzwojeń jak np. uzwojenie Ayrtona czy plecione.
Stała czasowa oporników wzorcowych, w zależności od klasy dokładności, zawarta jest w przedziale 10~6s + 10~8s.
44
W obwodach prądu przemiennego opornik jest reprezentowany przez impe-dancję Z, tymczasem przyjmuje się ,że ma on tylko rezystancję -/?„. Błąd spowodowany zaniedbaniem reaktancji opornika przy prądzie przemiennym, można wyznaczyć za pomocą wzoru
8T = Z~R" = r-y/l + (w-T)2 -1]. 100% (2.14)
R„ L J
Przy częstotliwościach technicznych ( ok. 50Hz) wpływ stałej czasowej jest pomijamy, jednak przy dokładnych pomiarach uwzględnia się go już przy częstotliwościach powyżej lOOHz.
Najczęściej spotykany podział wzorców to: wzorce nienastawne odtwarzające jedną wartość rezystancji - zwane opornikami wzorcowymi, i wzorce nastawne, odtwarzające wiele wartości rezystancji - zwane opornikami dekadowymi.
2.3.1. Oporniki wzorcowe jednostopniowe.
Oporniki wzorcowe powinny spełniać wymagania normy PN-90 E-06509 Oporniki wzorcowe. Ogólne wymagania i badania. Norma ta podaje poniższe określenia.
Opornik wzorcowy jest to rezystor lub zespół rezystorów odwzorowujący określoną wartość rezystancji między zaciskami napięciowymi opornika.
Wartość znamionowa rezystancji R„ - wartość rezystancji podana na oporniku.
Wartość umowna rezystancji Rum- wartość rezystancji, w stosunku do której wyznacza się błąd opornika. Za wartość umowną przyjmuje się:
wartość uwierzytelnioną dla oporników o wskaźnikach klas dokładności 0,0005-5-0,01, (Sppm-s-lOOppm),
wartość znamionową dla oporników pozostałych o wskaźnikach 0,02-5-0,2 (200ppm-5-2000ppm).
Wartości znamionowe rezystancji R„ oporników wzorcowych są podwielo-krotnością lub wielokrotnością l Q zgodnie ze wzorem
Rn=lO"-lQ, (2.15)
w którym p jest liczbą całkowitą z przedziału (-4-H-7).
45
Jednym z podstawowych parametrów metrologicznych oporników, decydujących o ich przydatności w układach pomiarowych prądu stałego, jest bląd podstawowy zdefiniowany następująco
§=R~R<"» 100% (2.16)
Rum
gdzie: R - wartość rzeczywista (poprawna) rezystancji opornika, wyznaczona w warunkach znamionowych (odniesienia); Rum - wartość umowna rezystancji opornika.
Warunki odniesienia podaje norma , a dotyczą one wartości takich parametrów jak:
temperatura otoczenia 23°C, wilgotność względna powietrza 50%, moc obciążenia - wartość dowolna w zakresie znamionowym; rodzaj prądu, pozycja pracy,
natężenie zewnętrznego pola magnetycznego 40A/m, chłodzenie - naturalne.
W zależności od wartości błędów podstawowych norma PN-90/06509 rozróżnia 9 klas dokładności oporników wzorcowych, o wskaźnikach:
0,0005; 0,007; 0,002; 0,005; 0,07; 0,02; 0,05; 0,7 i 0.2. Przy tym, wskaźnik klasy jest równy liczbowo wartości granicznej błędu podstawowego wyrażonego w procentach lub ppm. Np. dla opornika klasy 0,0005 błąd podstawowy wyznaczony w warunkach odniesienia nie powinien przekraczać ±0,0005%, (lub ±5 ppm), dla opornika klasy 0,001 nie powinien przekraczać ±10 ppm itd.
Elementy te umieszcza się w obudowach wykonanych z metalu lub masy plastycznej, mających kształt kubka z pokrywą izolacyjną i zaciskami. Często w pokrywie znajduje się gniazdo umożliwiające umieszczenie termometru. Otwory w obudowie ułatwiają chłodzenie elementu rezystancyjnego po zanurzeniu opornika w cieczy chłodzącej (olej, nafta).
Ważnym parametrem oporników wzorcowych jest ich obciążalność, wyrażana za pomocą dopuszczalnej mocy wydzielanej na oporniku wzorcowym. Wartość mocy dopuszczalnej zależy od warunków chłodzenia. W powietrzu wynosi najczęściej Pd0p=lW, zaś w kąpieli cieczowej Pdop=3W. Moc ta określa dopuszczalne wartości prądu jaki może płynąć przez opornik, zgodnie z zależnością
46
(2.17)
Przekroczenie wartości dopuszczalnej prądu może spowodować trwałą zmianę rezystancji opornika lub jego zniszczenie. Utrzymanie mocy obciążenia i temperatury otoczenia we właściwych granicach jest niezbędnym warunkiem prawidłowego użytkowania oporników wzorcowych.
Oporniki wzorcowe mają dwie pary zacisków: dwa zaciski prądowe i dwa zaciski napięciowe. Zaciski prądowe służą do doprowadzenia prądu do opornika, zaś zaciski napięciowe - do pomiaru napięcia na oporniku. Rezystancja opornika jest zawarta między zaciskami napięciowymi.
/ l > o—
Rys.2.12. Schemat elektryczny opornika wzorcowego; 1,2 -zaciski prądowe, 3,4 - zaciski napięciowe.
Stosowanie zacisków prądowych i napięciowych zmniejsza błędy spowodowane wpływem rezystancji przejściowych na stykach przewodów łączących i zaciskach, zwłaszcza tam, gdzie są one porównywalne z wartością rezystancji opornika wzorcowego. Oporniki wzorcowe o rezystancji powyżej Ikfi! mogą mieć tylko dwa zaciski.
Zaciski oporników prądu przemiennego powinny być oznaczone literami L i H. Literą L oznacza się zacisk, który w układzie pomiarowym powinien mieć niższy potencjał.
Oporniki wzorcowe są budowane na określoną częstotliwość znamionową prądu. Częstotliwość ta jest wybrana z następującego szeregu:
50, 100, 200, 500 Hz 1,2,5,10,20,50,100 kHz.
Stałe czasowe oporników wzorcowych powinny być mniejsze od wartości podanej przez wytwórcę, wybranej z szeregu:
1,2,5,10 100 ns.
47
2.3.2. Oporniki wzorcowe regulowane
Opornikiem dekadowym nazywa się zespół dekad umieszczonych we wspólnej obudowie.
Dekada jest to grupa oporników z przełącznikiem (najczęściej pokrętnym lub kołkowym) umożliwiającym nastawianie rezystancji o wartości równej zero oraz z mnożnikiem równym kolejnym liczbom naturalnym od l do 9, 10 lub 11.
Oporniki dekadowe z przełącznikiem pokrętnym mają 10 lub 9 jednakowych elementów oporowych połączonych ze sobą szeregowo. Poniżej przedstawiono układ połączeń opornika czterodekadowego.
Rys.2.13. Układ połączeń opornika dekadowego z przełącznikiem pokrętnym
Oporniki z przełącznikiem kołkowym, mają układ wagowy oporników. W obrębie dekady są cztery oporniki o różnych wartościach, np. (l+2+3+4)xlOpQ, lub (l+2+2+5)xlOpQ, gdzie p=±l,+2,+3..., połączone ze sobą szeregowo oraz każdy z nich odpowiednio do gniazda przewodzącego, umożliwiającego jego zwarcie za pomocą stożkowego kołka wykonanego z mosiądzu (zobacz rysunek 2.14). Regulacja wartości nastawionej polega na zwieraniu kołkami lub rozwieraniu elementów oporowych o odpowiednich wartościach, tak aby suma rezystancji niezwartych elementów była równa żądanej.
Na stykach między kołkiem a gniazdem występuje zawsze pewien opór (rzędu lmQ). Jego wartość zależy od siły z jaką kołek został wciśnięty oraz od jakości wykonania i stanu stykających się powierzchni. Z tego względu należy bardzo starannie konserwować stykające się powierzchnie.
48
Rys.2.14. Budowa dekady w oporniku kołkowym
Oporniki dekadowe buduje się najczęściej jako zestawy cztero- lub sześcio-dekadowe. Ze względów technologicznych najmniejszy stopień dekady jest równy O, l Q, a największy 1MQ.
Błędy oporników dekadowych, zarówno przy prądzie stałym, jak i przemiennym, określa się w taki sam sposób jak błędy oporników wzorcowych. W zależności od wartości tych błędów norma PN-90/E-06508 Oporniki dekadowe. Ogólne wymagania i badania, rozróżnia dziewięć klas dokładności oporników dekadowych:
0,01; 0,02; 0,05; 0,1; 0,2; 0,5; 1; 2 i 5.
Klasę opornika dekadowego należy rozumieć w ten sposób, że dekada o największej wartości jest wyrażona z błędem (wyrażonym w procentach ) liczbowo równym symbolowi klasy. Dekady o opornikach mniejszych są wykonywane mniej dokładnie.
Ze względu na nienajlepsze warunki chłodzenia elementów oporowych w opornikach dekadowych dopuszczalne obciążenie poszczególnych cewek (elementów oporowych) jest zawarte w przedziale (0,5*l)W/cewkę oporową. Stąd największe ograniczenie prądu mają oporniki (cewki) o największej rezystancji.
2.3.3. Państwowy wzorzec oporu elektrycznego
Państwowy wzorzec oporu elektrycznego składa się z czterech wzorców o najwyższej dokładności: podstawowego, świadka, porównania i odniesienia (zob. rys.2.1). W Polsce w skład wzorca podstawowego wchodzi sześć oporników wzorcowych o wartości nominalnej l Q. Jako wartość oporu wzorcowego przyjmuje się średnią arytmetyczną ze wszystkich wartości oporu oporników wchodzących w skład grupy. Wartość tę uznaje się za niezmienną w okresie między dwoma jej wyznaczeniami na drodze porównań z wzorcem międzynarodowym. Wzorzec podstawowy zapewnia odtwarzanie jednostki oporu elektrycznego
49
z odchyleniem średnim kwadratowym wyniku pomiaru nie gorszym niż 1-10"7 (przy liczbie pomiarów nie mniejszej niż 10).
Wzorce świadek i porównania są również wzorcami grupowymi, utworzonymi z oporników o wartości nominalnej równej l Q.
Wzorzec odniesienia tworzy grupa oporników wzorcowych o wartościach nominalnych od 10"3Ś2 do!07Q.
Wartość jednostki oporu za pomocą precyzyjnych komparatorów, mostków, kalibratorów i multimetrów jest przekazywana wzorcom niższych rzędów ( także wzorcom pracującym w układach prądu przemiennego.
Zgodnie z zasadą aby wzorce miary były określone ze zjawisk molekularnych jako niezmiennych w czasie, są prowadzone nad budową wzorca rezystancji opartego na kwantowym efekcie Halla (QHR) odkrytym przez Klausa von Klit-zingaw!980r.
Kwantowy efekt Halla występuje w półprzewodnikowych płytkach o strukturach np.AlGaAs-GaAs lub InGaAs-InP ochłodzonych do temperatury 0,36K. Jeżeli płytkę taką, zasilaną w kierunku osi x prądem stałym o wartości I=10nA umieści się w silnym polu magnetycznym, którego wektor indukcji (B=12,6T) jest skierowany w kierunku osi z, to rezystancja w kierunku osi y jest równa
fl
y 2e2n n gdzie: A-stała Plancka; e-ładunek elektronu; n-2 lub 4.
Ponieważ wartości h i e zostały przyjęte arbitralnie (decyzja Międzynarodowego Biura Miar i Wag z 1972r), więc rezystancja płytki jest stała i niezależna od czasu. Wzorce tego typu umożliwiają odtworzenie jednostki rezystancji z błędem od l do 3- 1 0"8 (l ppm do 3- 1 0"2 ppm ) i służą do kontroli stałości w czasie wzorców użytkowych.
2.4. WZORCE POJEMNOŚCI
Wzorcami pojemności są kondensatory wzorcowe. Kondensatorom tym stawia się następujące wymagania:
dokładna wartość pojemności, stałość pojemności w czasie, niezależność pojemności od temperatury, niezależność pojemności od częstotliwości, mały współczynnik stratności.
50
Wymagania te najlepiej spełniają kondensatory powietrzne i próżniowe o prostych geometrycznie kształtach. Są to wzorce liczalne, tj. kondensatory wzorcowe, których pojemność jest obliczana na podstawie wymiarów geometrycznych, wyznaczonych z dużą dokładnością oraz znajomości stałej dielektrycznej próżni. Najczęściej są to kondensatory płaskie o kolistym kształcie elektrod lub kondensatory cylindryczne. Elementy konstrukcyjne utrzymujące elektrody we właściwym położeniu są wykonywane z materiałów o dużej rezystyw-ności (p=1016Qm) takich jak kwarc lub bursztyn. Elektrody kondensatorów są umieszczane w metalowym ekranie, by ustalić pojemności względem otoczenia, tak jak pokazano na rysunku 2.15.
Rys.2.15. Schemat zastępczy ekranowanego wzorca pojemności
Wzorzec ma trzy zaciski: dwa z nich (l oraz 2) są przyłączone do elektrod, a trzeci (0) do ekranu. Jeśli zacisk O jest połączony z zaciskiem l, to pojemność kondensatora wzorcowego między zaciskami l i 2 jest równa
C — C
*- ~*-
(2.19)
gdzie: C\i - pojemność między elektrodami kondensatora, C2o - pojemność między elektrodą 2 a ekranem.
Jeżeli połączy się ze sobą zaciski O i 2, to pojemność kondensatora wzorcowego między zaciskami l i 2 jest równa
'10
12
C = C,, + C
(2.20)
51
gdzie: Cio - pojemność między elektrodą l a ekranem.
Wartości pojemności C\2, C\$ oraz €20 są podawane na tabliczce znamionowej wzorca.
W idealnym kondensatorze (bezstratnym) kąt przesunięcia fazowego (p między prądem a napięciem wynosi n/2. W kondensatorach rzeczywistych występują straty na histerezę dielektryczną i straty cieplne. Straty te wynikają przede wszystkim z właściwości dielektryka i elementów konstrukcyjnych: izolatorów i doprowadzeń. Jakość rzeczywistego kondensatora określa kąt strat dielektrycznych S lub współczynnik strat dielektrycznych tg8.
= TC/2-<p
(2.21)
Kondensator rzeczywisty można przedstawić za pomocą układu zastępczego szeregowego lub równoległego zawierającego pojemność i rezystancję.
a)
b)
u
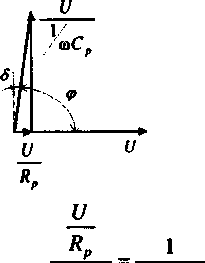
tg8 =
u>CpU ti>RpC„
ooC,
Rys.2.16. Układy zastępcze kondensatora ze stratami; a) równoległy, b) szeregowy
52
Kąt strat dielektrycznych 8, charakteryzujący jakość kondensatora zależy od częstotliwości i od napięcia przyłożonego do kondensatora. Dlatego też tg8 wzorców pojemności jest podawany dla znamionowej częstotliwości i znamionowego napięcia.
Właściwości dielektryczne powietrza są zbliżone do właściwości dielektryka doskonałego (bezstratnego), stąd też kondensatory powietrzne charakteryzują się bardzo małym tgd (tgó * 1-lff5 przy częstotliwości/ = IkHź).
Budowane są powietrzne kondensatory wzorcowe o wartościach pojemności od kilku pF do lOOOOpF.
Wzorce odniesienia odtwarzają jednostkę pojemności z błędem względnym <H(T5%(0,lppm).
Roczne względne zmiany pojemności kondensatorów wzorcowych wynoszą < 0,2ppm.
Zmianę pojemności pod wpływem temperatury określa współczynnik temperaturowy pojemności, który dla kondensatorów wzorcowych jest rzędu ok. 2-l(T6/K.
Kondensatory powietrzne są budowane na napięcia znamionowe: 250V-500kV.
Wadą kondensatorów powietrznych jest mała wartość pojemności przy jednocześnie dużych wymiarach. Dlatego kondensatory wzorcowe o pojemnościach większych od lOOOOpF są budowane z dielektrykiem mikowym. Dzięki dużej przenikalności dielektrycznej oraz dużej wytrzymałości na przebicie, wymiary i masa wzorców mikowych są znacznie mniejsze niż wzorców powietrznych. Wykonuje się wzorce mikowe o pojemności do 10 pF. Ich tg 6 < 5-1 ff4 przy częstotliwości/= 7 kHz.
Obecnie buduje się wzorce polistyrenowe ( styrofleksowe ), których właściwości są zbliżone do właściwości kondensatorów mikowych.
Wzorce mikowe i styrofleksowe są wykonywane jako dekadowe wzorce nastawne. Schemat połączeń dekady wzorca o regulowanej pojemności pokazano na rysunku 2.17.
Zwykle największy stopień dekady wzorca pojemności wynosi l [iF, najmniejszą dekadą zaś jest obrotowy kondensator powietrzny umożliwiający płynne nastawianie pojemności w zakresie 0+ WOpF. Wzorce nastawne budowane są jako zestawy cztero-, pięcio- lub sześciodekadowe, najczęściej w klasie 0,1 lub 0,5.
HH*
53
Rys.2.17. Schemat połączeń dekady pojemności.
2.5.WZORCE INDUKCYJNOŚCI
2.5.1.Wzorce indukcyjności własnej
Wzorcami indukcyjności własnej są cewki nawinięte jedno- lub wielowarstwowo na korpusach z materiałów o minimalnym współczynniku rozszerzalności temperaturowej, np. z marmuru, porcelany lub szkła. Ze względu na zjawisko na-skórkowości cewki nawijane są przewodem skręconym z wielu cienkich przewodów miedzianych (tzw. lica), izolowanych emalią lub jedwabiem. Wzorce te należą do wzorców liczalnych tzn. takich, których wartość można obliczyć na podstawie liczby zwojów i wymiarów geometrycznych uzwojenia.
Budowane są wzorce indukcyjności o wartościach od lOjiH do 10H. Błąd względny odtworzenia jednostki przez wzorzec odniesienia wynosi 5-10"4%, (5 ppm). Błędy wzorców użytkowych nie przekraczają zwykle 0,02%. Względne zmiany indukcyjności na skutek zmian temperatury (zmiana wymiarów geometrycznych ) są mniejsze niż 4 ppm/K.
Indukcyjność wzorca zależy od częstotliwości. Jest to wywołane przede wszystkim przez pojemności międzyzwojowe oraz - w mniejszym stopniu - przez prądy wirowe i straty dielektryczne w izolacji. Pojemności między zwojami można przedstawić w uproszczeniu jako pojemność skupioną włączoną między zaciski wzorca. Schemat zastępczy wzorca indukcyjności jest więc taki sam jak schemat zastępczy opornika wzorcowego.
54
Rys.2.18. Schemat zastępczy wzorca indukcyjności własnej
Przy częstotliwościach bliskich częstotliwości rezonansowej reaktancja indukcyjna układu wzrasta szybciej niż częstotliwość. Jest to równoznaczne ze zwiększaniem się indukcyjności wypadkowej ze wzrostem częstotliwości. Wzorce indukcyjności powinny być używane przy częstotliwościach znacznie mniejszych niż częstotliwość rezonansowa. Zwykle wartość indukcyjności wzorca jest podawana dla konkretnej częstotliwości, najczęściej dla l kHz.
Jednym z parametrów charakteryzujących jakość wzorców indukcyjności jest dobroć Q, obliczana według wzoru
i= ®L R
(2.22)
Budowane obecnie wzorce mają dobroć od 50 do 200, przy f=lkHz.
Oprócz wzorców jednomiarowych budowane są wzorce indukcyjności nastawne w postaci zestawów dekadowych. Układ połączeń dekady indukcyjności pokazano na rysunku 2.19.
Rys.2.19. Układ połączeń dekady indukcyjności
55
Szeregowo z cewkami są włączone oporniki, dzięki czemu rezystancja dekady ma wartość stałą, prawie niezależną od wartości nastawionej indukcyjności. Wzorce te są nawijane na toroidalnych rdzeniach ferromagnetycznych o stosunkowo niewielkiej względnej przenikliwości magnetycznej (rzędu 20-5-50). Wartość indukcyjności tych cewek zależy w pewnym stopniu od wartości przepływającego prądu. Dlatego też błędy wzorców nastawnych są większe od błędów wzorców nienastawnych. Wynoszą one od 0,1% do 2%.
2.5.2. Wzorce indukcyjności wzajemnej
Wzorce indukcyjności wzajemnej uzwaja się podobnie jak wzorce indukcyjności własnej, ale dwoma przewodami jednocześnie. Istnieją również wzorce, których uzwojenia są umieszczone w oddzielnych przegrodach korpusu. Budowane są na wartości od Imffdo l H.
Buduje się również regulowane wzorce indukcyjności wzajemnej. Do takich wzorców należy wariometr. Składa się on z dwu okrągłych cewek: ruchomej i nieruchomej. Cewka ruchoma, którą można obracać dookoła osi, jest umieszczona wewnątrz cewki nieruchomej. Indukcyjność wzajemna obu cewek zmienia się w zależności od kąta, pod jakim przecinają się płaszczyzny cewek i równa się zeru, gdy płaszczyzny cewek są prostopadłe względem siebie. Jeśli kąt między płaszczyznami jest większy niż 90°, to indukcyjność wzajemna zmienia znak. Niektóre wariometry umożliwiają zmianę indukcyjności wzajemnej w granicach odO,0004HdoO,2H.
W układach pomiarowych, w które są włączone cewki wzorcowe należy zwrócić uwagę na to, by wartość prądu płynącego przez cewkę nie przekroczyła wartości dopuszczalnej dla cewki, którą podaje producent. Np. cewka wzorcowa indukcyjności własnej produkcji firmy Norma-Wien o L„=1H ma dopuszczalny prąd 0,25A, a cewka indukcyjności wzajemnej tej samej firmy dla L„=10mH ma prąd dopuszczalny l A.
2.6. ŹRÓDŁA CZĘSTOTLIWOŚCI WZORCOWYCH
W zależności od przeznaczenia, źródła częstotliwości wzorcowych dzielą się na wzorce odniesienia, kontrolne i użytkowe.
Wzorcami odniesienia są atomowe wzorce cezowe, rubidowe oraz masery wodorowe.
56
Wzorcami kontrolnymi są generatory kwarcowe oraz zespoły aparatury do nadawania sygnałów wzorcowej częstotliwości drogą radiową i przewodową. Wzorcami użytkowymi są generatory pomiarowe, zegary, stopery itp.
Cezowy wzorzec częstotliwości
Cezowy wzorzec częstotliwości realizuje fizyczną definicję sekundy, czyli jednostki czasu, a zarazem jest wzorcem częstotliwości ponieważ częstotliwość jest powiązana prostą zależnością z czasem.
Sekunda jest to czas równy 9192631770 okresów drgań pola elektromagnetycznego jednoznacznie odwzorowującego przejście między stanami energetycznymi F=4 i F=3 swobodnych atomów cezu 133.
Zgodnie z powyższą definicją, wzorzec ten pracuje na zasadzie porównania częstotliwości drgań bardzo stabilnego generatora kwarcowego z częstotliwością rezonansową linii absorbcyjnej atomów cezu. Linia ta jest uzyskiwana w spektrometrze masowym, przez który przebiega wiązka atomów tego pierwiastka.
Zasadę działania wzorca odniesienia ilustruje schemat funkcjonalny cezowej lampy promieniowej przedstawiony na poniższym rysunku.
Ekrany magnetyczne
|
- |
|
":::z:/:::::.. |
|
|
|
|
|||||
|
|
|
|
Ki |
mim x>&! |
ra |
|
|
|
|
|
|
Piec cezowy |
|
Selektor magnetyczny I |
|
|
|
|
|
|
Selektor magnetyczny II |
|
Detektor promenio-wania |
|
|
|
|
|
miki |
|
owa |
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
Powielacz jonów |
|
Spektrometr masowy |
|||
|
|
|
|
|
|
|
1 |
|
|
|||
Wyjście
Wejście mikrofalowe f=9192631770Hz
Rys.2.20. Schemat funkcjonalny cezowej lampy promieniowej
Piec cezowy jest źródłem odpowiednio uformowanej wiązki atomów cezu o wymaganej temperaturze. Wiązka ta, za pomocą kolimatora umieszczonego tuż za piecem, jest kierowana w obszar oddziaływania selektora magnetycznego I. Magnesy tego selektora powodują zmiany poziomów energetycznych ato-
57
mów cezu. Przy braku zewnętrznego pola magnetycznego w wiązce występują atomy tylko o dwóch poziomach energetycznych F=4 i F=3. Jednakże już w polu o indukcji B=6-10~6T (wytworzonym przez magnesy selektora I) atomy grupy o większej energii (F=4) mogą przyjąć jeden z 9 nadsubtelnych poziomów, atomy zaś o mniejszej energii (F=3) mogą przyjąć jeden z 7 poziomów. Przy dużej indukcji pola magnetycznego atomy o podpoziomie energetycznym F=4, niF=-4 (F i mp - liczby kwantowe) przechodzą do grupy F=4. Różnica energii między poziomami F=4 i F=3 jest opisana wzorem Einsteina
&W=hf (2.23)
gdzie: h - stała Plancka,
/- częstotliwość przejścia.
Przejście atomów cezu z jednego stanu energetycznego do drugiego jest związane z rezonansowym pochłanianiem energii w komorze mikrofalowej, pobudzonej do drgań o częstotliwości/=9192631770 Hz,
Selektor magnetyczny II wytwarza silne, niejednorodne pole magnetyczne o indukcji B=1T. W polu tym atomy cezu ulegają odchyleniu w zależności od ich energii. Atomy o podpoziomach energetycznych F=3 i atomy o podpozio-mach F=4, mp=-4 są odchylane w obszar pola o większej indukcji, pozostałe zaś w obszar pola o mniejszej indukcji. Selektor magnetyczny II separuje więc przestrzennie te dwie grupy atomów. Po wyjściu z komory mikrofalowej i przejściu przez pole wytwarzane przez magnesy selektora II, wiązka atomów o podpoziomie energetycznym F=4, mF=4 trafia przez detektor promieniowania do spektrometru masowego, który przestrzennie separuje jony cezu od jonów innych pierwiastków stanowiących szumy. Stąd wiązka jest przesyłana na powielacz, który wzmacnia sygnał prądowy (rzędu l O"12 A) do poziomu wyższego od poziomu szumów. Prąd wyjściowy ma składową stałą i składową przemienną o częstotliwości 137 Hz.
Sygnał wyjściowy cezowej lampy promieniowej ma małą moc. Dlatego wzorzec cezowy nie jest stosowany bezpośrednio, lecz pośrednio - najczęściej do stabilizacji częstotliwości stabilnego wzorca kwarcowego. Schemat struktury takiego wzorca przedstawiono na rysunku 2.21.
Podstawowym podzespołem tego wzorca jest stabilny generator kwarcowy generujący napięcie o częstotliwości fw= 5MHz. Sygnał wyjściowy z generatora jest podawany do układu dwoma torami. W jednym torze sygnał o częstotliwości f„ przez wzmacniacz dochodzi do syntetyzera. Z syntetyzera sygnał o częstotliwości//= 12,631770MHz jest podawany do generatora harmonicznych.
58
Rys.2.21.Schemat struktury cezowego wzorca częstotliwości
W drugim torze sygnał/,, jest modulowany częstotliwościami/ = 90MHz oraz/= 137Hz i również podawany do generatora harmonicznych. W generab-rze następuje mieszanie sygnałów o częstotliwościach/ i/, w wyniku czego na jego wyjściu pojawia się sygnał o częstotliwości/ = 9,192631770 GHz, a więc sygnał o częstotliwości rezonansowej atomów cezu. Sygnał o częstotliwości/ jest następnie podawany do cezowej lampy promieniowej (ściślej do jej komory mikrofalowej).
Jeżeli częstotliwość /, jest równa 5MHz, to częstotliwość / jest równa częstotliwości rezonansowej cezowej lampy promieniowej, a pad wyjściowy lampy zawiera składową stałą i składową zmienną o częstotliwości/ = 137Hz. Jeżeli częstotliwość/, różni się od 5MHz, to prąd wyjściowy zawiera składowe harmoniczne, których amplituda dostarcza informacji o różnicy między częstotliwością /, a 5MHz, faza zaś informuje o znaku tej różnicy.
Prąd wyjściowy z cezowej lampy promieniowej po wzmocnieniu jest dopo-wadzany do detektora, gdzie jest porównywany z sygnałem o częstotliwości /= 137Hz. Otrzymany z detektora sygnał b^du koryguje częstotliwość /,= 5 MHz generatora kwarcowego.
Tak skonstruowany wzorzec wytwarza sygnał wzorcowy o csęstotliwości 5MHz z błędem względnym niniejszym niż ±MO"13.
3
METODY POMIAROWE
3.1. OGÓLNA CHARAKTERYSTYKA METOD
Terminem metoda pomiarowa określa się sposób porównywania wielkości stosowany przy wykonywaniu pomiaru.
Każdą wielkość fizyczną można mierzyć różnymi sposobami korzystając z różnych metod. Wybór metody jest uzależniony od wartości wielkości mierzonej, jej rodzaju, wymaganej dokładności, wykorzystania wyniku pomiaru, itp.
Klasyfikacja metod pomiarowych może być dokonywana w bardzo różnorodny sposób. Wydaje się, że najbardziej celowe będzie dokonanie klasyfikacji, mając na uwadze charakterystyczne cechy metrologiczne i użytkowe. Z tego punktu widzenia metody pomiarowe można podzielić:
według przetwarzania sygnału pomiarowego w procesie pomiarowym,
według uzyskiwania wyniku pomiaru,
według porównania realizowanego w trakcie procesu pomiarowego.
3.2. METODY ANALOGOWE I CYFROWE
Ze względu na sposób przetwarzania sygnału pomiarowego w procesie pomiarowym, metody pomiarowe można podzielić na metody analogowe i cyfrowe.
Metoda analogowa polega na tym, że wartości wielkości mierzonej, zmieniającej się w sposób ciągły, jest przyporządkowana wartość zmieniająca się też w sposób ciągły jak np. odchylenie organu ruchomego miernika. W metodzie cyfrowej - ciągłym podziałom wartości wielkości mierzonej są podporządkowane dyskretne (nieciągłe) przedziały wartości wielkości wyjściowej. Wielkość wyjściowa ma formę kwantów. Metoda cyfrowa charakteryzuje się zamianą wielkości wejściowej na dyskretną, nieciągłą wartość wyjściową podawaną w formie cyfrowej.
Jeżeli odbiorcą wyniku pomiaru w metodzie cyfrowej jest człowiek, to stosuje się zapis dziesiętny. Jeżeli odbiorcą jest komputer wynik pomiaru podany jest w kodzie dwójkowym.
60
3.3. METODY BEZPOŚREDNIE I POŚREDNIE
Ze względu na sposób uzyskiwania wyniku pomiaru metody pomiarowe można podzielić na bezpośrednie i pośrednie.
Metoda jest bezpośrednia, jeżeli wartość wielkości mierzonej otrzymuje się bezpośrednio bez wykonywania dodatkowych obliczeń. Przykładem może być pomiar napięcia woltomierzem, lub pomiar oporu elektrycznego omomierzem, pomiar czasu sekundomierzem, itp. Przyjmuje się, że metoda pomiarowa jest bezpośrednia w przypadku, gdy podziałka przyrządu podaje wartości umowne związane, w postaci wykresu czy tablic, z wartościami wielkości mierzonej bądź, gdy zachodzi potrzeba wykonywania dodatkowych pomiarów w celu np. wyznaczenia wpływu czynników zewnętrznych tak, aby można było wprowadzić poprawki. Trzeba jednak mieć na uwadze fakt, że poprawkę oblicza się zawsze z pewnym błędem, ponieważ parametry przyrządów, na podstawie wskazań których oblicza się poprawkę, są znane z pewnym przybliżeniem.
W metodzie pośredniej wartość wielkości mierzonej otrzymuje się pośrednio z pomiarów bezpośrednich innych wielkości związanych znaną zależnością funkcyjną z wielkością mierzoną
Y = f(Xl,X2,X„...XN) (3.1)
Wielkości Xl,X2,X3,...XN są mierzone bezpośrednio. Przykładem może być pomiar rezystancji metodą techniczną w układzie z woltomierzem i amperomierzem
* = y (3-2)
Zależność funkcyjna, jej postać, ma bezpośredni wpływ na dokładność wyznaczenia wielkości mierzonej, gdyż błędy pomiarów wielkości mierzonych bezpośrednio przenoszą się w różny sposób na wynik końcowy.
W praktyce można spotkać się z przypadkiem, że wykonanie bezpośredniego pomiaru nie jest możliwe np. wyznaczenia gęstości ciała można dokonać tylko przez wyznaczenie jego masy i objętości. Niekiedy metodę bezpośrednią nazywamy metodą prostą,, a metodę pośrednią - metodą złożoną.
3.4. METODY PORÓWNAWCZE
Ze względu na sposoby porównania wartości wielkości mierzonych z wartościami wielkości wzorcowych rozróżnia się metody pomiarowe bez-
61
względne i porównawcze. Metody porównawcze, ze względu na zasadę porównania można podzielić na metodę odchyłową, metodę zerową i metodę różnicową. Metody zerowe, to metody kompensacyjne i metody komparacyjne.
Metoda pomiarowa bezwzględna jest to metoda pośrednia, w której równanie pomiaru jest równaniem definicyjnym tej wielkości. W metodzie bezwzględnej mierzy się te wielkości za pomocą których jest zdefiniowana wielkość mierzona. Do definicji najczęściej stosuje się wielkości podstawowe odtwarzalne najdokładniej. Przykładem tej metody może być pomiar pola prostokąta zdefiniowanego jako iloczyn długości boków lub ciśnienie jako siła działająca na jednostkę powierzchni. W technice pomiarów elektrycznych metoda ta nie znajduje szerszego zastosowania.
Metoda pomiarowa porównawcza polega na porównaniu wartości wielkości mierzonej z inną wartością tej samej wielkości przyjętą za wartość wzorcową lub odniesienia. Może to być porównanie ze znaną wartością innej wielkości jako funkcji wielkości mierzonej. Można tu wyróżnić następujące metody:
Metoda odchyłową - wielkość mierzona jest przetwarzana w przyrządzie na taką samą wielkość jak wielkość wzorcowa. Przyrząd porównujący jest skalowany w jednostkach wielkości mierzonej. Przyrządami porównującymi są przyrządy elektromechaniczne. W przyrządach tych wielkość mierzona jest przetworzona na moment napędowy, powodujący skręcenie organu ruchomego. Położenie organu ruchomego, a więc i wskazówki, jest funkcją wielkości mierzonej. Jest to metoda, która może być realizowana przy użyciu prostych środków technicznych. Wadą natomiast jest stosunkowo mała, w porównaniu z innymi metodami, dokładność (0,1-5-0,5%). Przykładem stosowania tej metody jest pomiar natężenia prądu, pomiar napięcia miernikami elektromechanicznymi, a także pomiar masy wagą sprężynową uchylną.
Metoda zerowa polega na sprowadzeniu do zera różnicy AX między wartością wielkości mierzonej X, a znaną, regulowaną wartością wielkości wzorcowej Xw. Miarą wartości A'jest w tej metodzie wartość Xw. Czynność badania różnicy między Xi Xw i sprowadzenia jej do zera nazywamy procesem równoważenia. Proces ten jest realizowany za pośrednictwem detektora (wskaźnika zera) i urządzenia wykonawczego regulującego wartość Xw w zależności od wartości i znaku sygnału AX . Elementem wykonawczym może być w układach automatycznych np. silnik nawrotny lub inne urządzenie elektryczne. W regulacji ręcznej rolę elementu wykonawczego spełnia obserwator. Stan obserwacji nie może być określony matematyczną równością X-XW=AX=0, gdyż istnieje
nieskończenie wiele wartości \X - Xw\ < AX , dla których detektor przyjmuje ten sam stan. Jest to spowodowane skończoną czułością detektora.
62
Metoda zerowa może być realizowana jako metoda komparacyjna i metoda kompensacyjna.
Metoda komparacyjna - w tej metodzie można porównywać dwie różne wielkości. W tym celu należy obie lub tylko jedną z nich tak przetworzyć, aby reprezentowały jednakowe wielkości będące nośnikami energii, a następnie je skompensować. Analizując metodę kompensacji, z matematycznego punktu widzenia, otrzymuje się, że wielkość mierzona X jest porównywana z wielkością wzorcową X w za pomocą dodatkowego zbioru liczbowego k, który określa sto-X
sunek = k . Badając różnicę X - Xw • k sprowadza się ja do zera przez re-
Xw
gulację Xw. W miernictwie elektrycznym metodę komparacyjna wykorzystuje się do dokładnych pomiarów wartości skutecznej prądów lub napięć przemiennych. Błąd tej metody można oszacować na ~ 0,05%.
Metoda kompensacyjna polega na tym, że w procesie porównania wielość mierzona jest przeciwstawiana wielkości wzorcowej tego samego rodzaju, która kompensuje jej fizyczne działanie na detektor. W stanie równowagi obie wielkości są jednakowe i skierowane przeciwnie (napięcie, prąd), X = Xw, i w tych warunkach detektor nie pobiera ze źródeł tych wielkości żadnej energii.
Metoda kompensacyjna charakteryzuje się następującymi cechami:
kompensację fizycznego działania wielkości można przeprowadzić
tylko wtedy, gdy wielkość mierzona jest nośnikiem energii (rezystancji
nie można bezpośrednio mierzyć metodą kompensacyjną),w stanie równowagi (skompensowania) przyrząd nie pobiera żadnej
energii z obiektu badanego; w stanie nieskompensowania w zależności
czy wielkość kompensująca jest mniejsza czy większa od mierzonej, raz
jest pobierana energia ze źródła wielkości mierzonej, drugi raz ze źródła
wielkości wzorcowej.
Przykładem praktycznego zastosowania metody kompensacyjnej mogą być kompensatory prądowe i napięciowe lub waga dwuramienna mierząca na zasadzie kompensacji momentów.
Metoda różnicowa polega na porównaniu wartości wielkości mierzonej z niewiele różnicą się od niej znaną wartością Xw tej samej wielkości i następnie zmierzeniu różnicy tych wartości AX . Do pomiaru tej różnicy stosuje się najczęściej metodę odchyłową. Równanie pomiaru dla przypadku idealnego ma postać
X-XW=AX (3.3)
a wielkość Xw jest nazywana wielkością porównawczą.
63
Przyrząd różnicowy ma większą dokładność niż przyrząd odchyłowy, gdyż łatwiej jest uzyskać błąd wielkości porównawczej mniejszy niż błąd przyrządu odchyłowego. Przy zachowaniu tej samej dokładności w przyrządzie różnicowym miernik może być mniej dokładny od przyrządu odchyłowego stosowanego w metodzie odchyłowej.
Przyrządy różnicowe są najczęściej stosowane do pomiaru bardziej złożonych wielkości fizycznych, których pomiar metodą odchyłową jest wykonywany z niewystarczającą dokładnością. Przykładem tej metody maja być mostki pracujące w stanie niezrównoważenia.
Ze względu na technikę porównania, metody pomiarowe można podzielić na metody realizowane przez podstawienie i metody realizowane przez przestawienie.
Metoda przez podstawienie - w metodzie tej wartość X wielkości mierzonej zastępuje się w układzie pomiarowym znaną wartością X w tej samej wielkości, wybraną w ten sposób, aby skutki wywołane przez te dwie wartości były takie same. Wynik pomiaru wynosi wówczas X = Xw . Przykładem może być pomiar rezystancji omomierzem. Do zacisków wejściowych omomierza przyłączamy raz opornik badany, drugi raz opornik wzorcowy regulowany, którego wartość tak zmieniamy, aby wskazania miernika w obydwu przypadkach były takie same.
Metoda przez przestawienie - stosowana w metodach zerowych polega na porównaniu wartości wielkości mierzonej najpierw ze znaną wartością A tej wielkości, a następnie na przestawieniu wielkości mierzonej w miejsce A, i ponowne jej porównanie ze znana wartością B tej samej wielkości. Jeżeli w obydwu przypadkach osiągnięto ten sam stan równowagi układu, to wówczas wartość wielkości mierzonej jest równa X = J A- B . Przykładem może być pomiar rezystancji mostkiem Wheatstone'a.
Jeżeli dla układu pomiarowego mostka Wheatstone'a stany równowagi wystąpią wtedy, gdy
X • /?2 = R ' R\ oraz
R"-R2=X-Rl
to po przekształceniach uzyskuje się
Innym przykładem może być układ z wagą szalkową do pomiaru masy.
4
ANALIZA BŁĘDÓW POMIAROWYCH
4.1. PRZYCZYNY I RODZAJE BŁĘDÓW
Otrzymany na drodze doświadczalnej wynik pomiaru dowolnej wielkości fizycznej zawsze różni się od wartości rzeczywistej. Wartość rzeczywista jest pojęciem abstrakcyjnym i nie może być znana eksperymentatorowi. Pomiar pozwala zatem na znalezienie przybliżonych wartości miar wielkości mierzonych.
Przyczynami rozbieżności między wynikiem pomiaru, a wartością rzeczywistą są:
ograniczona dokładność narzędzi pomiarowych,
niedokładność stosowanej metody pomiarowej,
niedoskonałość zmysłów obserwatora,
wpływ zmieniających się w czasie pomiaru wielkości wpływających.
Niedokładność przyrządu. Składowa błędu podstawowego przyrządu jest
spowodowana niedoskonałością wykonania elementów składowych, nieidealno-ścią właściwości materiałów użytych do budowy przyrządu i niedokładnością wzorcowania. Dla użytkowych narzędzi pomiarowych wartości błędów podstawowych są podawane jako błędy graniczne dopuszczalne. Wyznaczają one największą wartość błędu wskazania, jaka może wystąpić w dowolnym punkcie zakresu pomiarowego przyrządu w przypadku jego poprawnego użytkowania w warunkach odniesienia. Przez warunki odniesienia przyrządów rozumie się takie warunki, dla których podawane są dopuszczalne błędy przyrządu pomiarowego. Do najważniejszych parametrów charakteryzujących warunki odniesienia należy zaliczyć:
temperaturę,
ciśnienie,
wilgotność względną,
brak wstrząsów, wibracji i innych zakłóceń.
Warunki odniesienia dotyczą danego przyrządu (urządzenia) pomiarowego i powinny być podawane przez producentów.
Błędy metody są spowodowane przede wszystkim oddziaływaniem przyrządów pomiarowych na wielkość mierzoną lub zjawisko będące źródłem tej wielkości. Przykładem może być przyłączenie woltomierza, który zmienia rozpływ
65
prądów w badanym obwodzie lub zainstalowanie termometru, co zmienia rozkład pola temperaturowego.
Poza tym do błędu metody zaliczyć można błędy spowodowane sprzężeniami galwanicznymi, indukcyjnymi, i pojemnościowymi występującymi miedzy elementami układu pomiarowego. Błędy te powinny być sprowadzone do wartości praktycznie pomijalnych w stosunku do wartości błędu podstawowego. Jeżeli jest to niemożliwe, należy zmienić metodę pomiaru lub wprowadzić do wyniku pomiaru poprawki eliminujące błąd metody.
Niedokładność zmysłów obserwatora powoduje powstanie błędów w takich przypadkach, w których ocenia się położenie wskazówki między dwiema sąsiednimi kreskami podziałki, ocenia się natężenie dźwięku za pomocą słuchu, barwy lub równomierności oświetlenia całego pola widzenia za pomocą wzroku lub też w przypadku wykonywania w czasie pomiaru takich czynności, których jakość jest zależna od reakcji obserwatora.
Wartości czasu reakcji wynoszą średnio dla bodźców a) wzrokowych 0,15-*-0,2s, b) słuchowych O, l •*-(), 15s, i zależą w pewnym stopniu od natężenia bodźca jak i ogólnego stanu fizycznego obserwatora (np. zmęczenie fizyczne, psychiczne, itp.).
Obserwator może rozróżnić nieuzbrojonym okiem odległość punktów lub kresek wynoszącą 0,05+0, l mm. Odczytanie i zapamiętanie jednej cyfry jest możliwe, gdy ekspozycja obrazu trwa ponad O, l s; liczba trzycyfrowa wymaga już
czasu 0,3-5-0,5s. Jeżeli liczba ma więcej cyfr, to czas odczytywania znacznie wzrasta.
Niekiedy w pomiarach słuch jest wykorzystywany do stwierdzenia zaniku dźwięku lub do porównania wysokości dźwięków. Zakres częstotliwości, na które reaguje ucho ludzkie wynosi od 16 do 20000Hz, przy czym największa czułość występuje w zakresie 200-5-5000 Hz. W przedziale największej czułości, graniczna czułość ucha wynosi około 1-10"I7W.
Błąd paralaksy jest związany z niedoskonałością zmysłów obserwatora i powstaje w skutek niewłaściwego kierunku rzutowania wskazówki na płytkę podziałkową. W celu wyeliminowania błędu paralaksy w przyrządach klas laboratoryjnych pod płytką podziałkową umieszcza się lusterko do kontroli kierunku patrzenia. Kierunek jest prawidłowy, gdy wskazówka pokrywa się z obrazem
wskazówki w lusterku. W przyrządach ze wskazówką świetlną ten błąd nie występuje.
Wpływ warunków odniesienia
Błędy spowodowane czynnikami wpływającymi mają najczęściej wartości zmienne w czasie. Wpływ tych błędów na wynik pomiaru jest odczuwalny przede wszystkim w pomiarach bardzo dokładnych.. W pomiarach techniczno-ruchowych, w których używane są mniej dokładne przyrządy, błędy spowodowa-
66
ne zmieniającymi się w czasie wielkościami wpływającymi mają mniejszy wpływ na końcowy wynik pomiaru.
Rodzaje błędów
Każdy wynik pomiaru różni się od wartości rzeczywistej. Różnicę między wartością Wt uzyskaną w wyniku /-tego pomiaru, a wartością rzeczywistą Wr nazywamy błędem bezwzględnym prawdziwym
^=Wt-Wr (4.1)
Błąd ten może mieć znak dodatni lub ujemny. Występują jednak duże trudności z jego wyznaczeniem ze względu na to, że nieznana jest wartość rzeczywista mierzonej wartości. W praktyce, zamiast wartości rzeczywistej przyjmuje się wartość poprawną Wp . Jest to wartość najbardziej zbliżona do rzeczywistej, wartość najbardziej prawdopodobna. Błąd ten nazywamy blędem poprawnym.
* = Wt-W„ (4.2)
W technice pomiarowej korzysta się często z tak zwanej poprawki, jest to taka wartość, którą należy dodać do wartości zmierzonej, aby otrzymać wartość poprawną
Wp=Wi+k (4.3)
Poprawka jest równa błędowi bezwzględnemu poprawnemu ze znakiem przeciwnym. Dla scharakteryzowania dokładności pomiarów wyznacza się błąd względny
5% = ' ~ " 100 (4.4)
% Wp
W praktyce często nie jest możliwe wyznaczenie błędu poprawnego i wprowadzenia korekty do wyniku pomiaru. W takim przypadku szacuje się granice przedziału w otoczeniu mierzonej wartości, w którym będzie mieścić się wartość rzeczywista mierzonej wielkości. Stanowi to podstawę do wyznaczenia tak zwanego błędu granicznego &g. Błąd graniczny wykorzystuje się najczęściej do oceny
dokładności przyrządów i urządzeń pomiarowych.
Ze względu na przyczyny występowania błędy w pomiarach można podzielić na:
- błędy systematyczne,
67
błędy przypadkowe,
błędy nadmierne, pomyłki.
Błędy systematyczne, to błędy, które przy wielu pomiarach wartości tej samej wielkości, wykonywane w tych samych warunkach, pozostają stałe co do wartości i znaku. Przykładem błędu systematycznego może być błąd wskazania miernika analogowego wynikający z nieprawidłowego wykreślenia podziałki. Błędy systematyczne powinny być w całości, lub częściowo, wyeliminowane z wyniku pomiaru.
Błędami przypadkowymi nazywamy błędy zmieniające się w sposób nieprzewidziany zarówno co do wartości jak i znaku przy wykonywaniu dużej liczby pomiarów w warunkach praktycznie niezmiennych. Wyeliminowanie błędu przypadkowego nie jest możliwe. Wartość błędów przypadkowych wyznacza się korzystając z metod rachunku prawdopodobieństwa i statystyki matematycznej.
Błędy nadmierne powstają przy nieprawidłowym wykonywaniu pomiarów, wadliwym działaniu przyrządów lub niespodziewanym wystąpieniu nieznanych zjawisk. Przykładem może być powstanie błędu nadmiernego wskutek błędnego odczytu wskazania. Wynik pomiaru obarczony błędem nadmiernym jest niewiarygodny i musi być usunięty z serii pomiarów.
Ocena dokładności uzyskanych w procesie pomiaru wyników może być przeprowadzona przy wykorzystaniu teorii błędów lub przy wykorzystaniu teorii niepewności.
Teoria błędów bazuje na modelu deterministycznym i losowym niedokładności. Wyznaczanie błędów może być realizowane przy przyjęciu modelu losowego metodą powtarzania błędów systematycznych, lub metodą randomizacji i centryzacji błędów systematycznych. Teoria ta, wydaje się, że może być stosowana do oceny dokładności przyrządów pomiarowych, w procesie oznaczania klasy ich dokładności.
Teoria niepewności przyjmuje za punkt wyjścia losowy model niedokładności i hipotetyczne powtarzanie pomiaru prowadzące do nieobciążonej randomi-zowanej estymaty wielkości mierzonej. Stosowanie teorii niepewności do oceny wyniku pomiaru stało się obowiązujące dla służb związanych z miarami. Została ona przyjęta przez międzynarodowe organizacje metrologiczne i europejskie laboratoria akredytowane. Trzeba ją znać i stosować wszędzie tam, gdzie wymagają tego przepisy.
Obliczanie błędu lub niepewności wyniku pomiaru jest procesem dość złożonym. Pełne poznanie teorii błędu i teorii niepewności wymaga zrozumienia ich istoty, co wymaga znajomości probabilistyki i statystyki matematycznej. Stosowanie analogii przy obliczaniu błędów czy niepewności często okazuje się bardzo zawodne.
68
4.2. TEORIA BŁĘDÓW
4.2.1. Błąd pomiaru bezpośredniego
Pomiar bezpośredni wykonuje się za pomocą przyrządu pomiarowego, którego wskazanie y jest wartością mierzonej wielkości. Do oceny dokładności pomiaru przyjmuje się deterministyczny i losowy model błędu.
Model deterministyczny błędu pomiaru zakłada, że powtarzanie pomiaru daje zawsze takie same wartości obarczone zawsze takim samym błędem poprawnym, nieznanym co do wartości. Jest to tak zwany błąd systematyczny. Można w tym przypadku wyznaczyć tylko wartość graniczną błędu. Błąd graniczny jest równy połowie szerokości przedziału, największego jaki można ustalić wokół wartości oczekiwanej, w którym mieści się wartość prawdziwa. Błąd poprawny w stosunku do błędu granicznego zachowuje relacje
Wartość graniczną błędu wyznacza się dla danego przyrządu pomiarowego na podstawie jego klasy dokładności. Błąd graniczny dla przyrządów elektromechanicznych liczbowo jest równy wskaźnikowi klasy dokładności. Na przykład woltomierz klasy 0,5 i U„ = 100V charakteryzuje się błędem granicznym
względnym równym 0,5%, a błędem bezwzględnym At/ = 0,5 • 0,01 • t/„ = 0,5V . Model losowy błędu zakłada, że hipotetyczne powtarzanie pomiaru w warunkach powtarzalności prowadzi do randomizacji wartości oczekiwanej. Staje się ona zmienną losową, co pociąga za sobą randomizację błędu granicznego. Przedział niepewności staje się przedziałem losowym. Błąd ten nazywamy błędem przypadkowym. Błąd przypadkowy &R- - średniej arytmetycznej równy jest średniej geome-
trycznej błędów przypadkowych pomiarów elementarnych. Błąd graniczny dla modelu losowego wyznacza się przez powtarzanie serii n pomiarów elementarnych.
as/?? = Za(Xj)/-Jn dla rozkładu normalnego (n > 30)
a«rx = łkP s(xi )/V" dla rozkładu ^-Studenta (4.5)
gdzie: tf(X) i S(X) odchylenie standardowe pojedynczego pomiaru i jej estymata,
69
Zp, tkp współczynnik rozkładu normalnego i rozkładu f-Studenta o (n -1) stopniach swobody wyznaczony dla poziomu ufności p.
(4.6)
M — l
(4.7) n-\
(4.8)
Błąd graniczny całkowity wyniku pomiaru, średniej arytmetycznej na poziomie ufności p oblicza się jako sumę algebraiczną granicznego błędu systematycznego i granicznego błędu na poziomie ufności p obliczonego z przyjętego modelu losowego.
X (4.9)
Przyjmując rozkład losowy błędów, błąd graniczny jest równy pierwiastkowi z sumy kwadratów składowych błędów granicznych
(4.10)
Przykład 4.1
Obliczyć graniczny błąd pomiaru napięcia za pomocą woltomierza cyfrowego klasy 0,1 o zakresie znamionowym U „ =50V. Pomiar przeprowadzono dziesięciokrotnie uzyskując następujące wyniki pomiaru:
t/, = 25,03V U6 = 25,01V
f/2=25,05V f/7=25,05V
f/3=25,06V [/8=25,02V
(74=24,98V f/9=25,OOV
f/5 = 24,93V f/10 = 24,95V
70
Obliczenia błędu przeprowadzić dla rozkładu najmniej korzystnego i losowego rozkładu błędów.
Obliczenia
Wartość średnia napięcia
i n
= 25,00 +
0,03 + 0,05 + 0,06 - 0,02 - 0,07 + 0,01 + 0,05 + 0,02 + 0,0-0,05 _
10
= 25,008 = 25,0 IV Odchylenie standardowe pojedynczego pomiaru
n-l
Błędy pozorne
Zestawienie wyników obliczeń
/ |
ux |
a; =!/,. -u, |
(A;)2xio-6 |
1 |
25,03 |
+0,022 |
484 |
2 |
25,05 |
+0,042 |
1764 |
3 |
25,06 |
+0,052 |
2704 |
4 |
24,98 |
-0,028 |
784 |
5 |
24,93 |
-0,078 |
6084 |
6 |
25,01 |
+0,002 |
4 |
7 |
25,05 |
+0,042 |
1764 |
8 |
25,02 |
+0,012 |
144 |
9 |
25,00 |
-0,008 |
64 |
10 |
24,95 |
-0,058 |
3364 |
|
S° |
£ = 17160-10-* |
|
Odchylenie standardowe pojedynczego pomiaru
71
Wartość graniczna błędu przypadkowego dla poziomu ufności p = l, k = 3
A RUX = kSx = 3 -= = -. • 0,044 = 0,042V
= = -.L • n Vi O
Błąd graniczny systematyczny
AgSt7, =8g£/„ = 0,01-0,1-50 = 0,C
Błąd graniczny całkowity pomiaru napięcia, przy przyjęciu najgorszego rozkładu bgUx = &gSUx + tLgRUx = 0,05 + 0,042 = 0,092 = 0,09V
Błąd graniczny względny
6 .T =-4^100 = ^^100 = 0,367% = 0,37%
gu Ux 25,01
Błąd graniczny całkowity pomiaru napięcia przy przyjęciu losowego rozkładu błędów
a; Ux = ^2gSUx+A2gKUx = VO,052+0,0422 = 0,0652 » 0,07 V Błąd graniczny względny
=
8U Ux 25,01
4.2.2. Błąd pomiaru pośredniego
Wielkość mierzona jest funkcją wielu zmiennych, w celu wyznaczenia jej wartości mierzy się bezpośrednio wartości kilku wielkości wejściowych Xl,X2...X N , a wartość mierzoną oblicza się z zależności funkcyjnej
72
Y = f(Xt,X2...XH) (4.11)
Jest to tak zwany pomiar pośredni. Funkcję f(Xr..XN)nazywa się funkcją pomiaru.
Każda z wielkości wejściowych X, jest mierzona w warunkach powtarzalności n razy, w wyniku otrzymuje się następujące wartości:
dlaX, są to xn,xl2,...xln
dlaX, są to X2l,x22,...x2a (4.12)
dlaX„ są to xm,xN2,...xNn
Uzyskane w wyniku pomiaru wartości Xl,X2... XN obarczone są błędami odpowiednio AX,, AX2...AX/V. Błędy te są funkcją błędów systematycznych i błę-
dów przypadkowych.
Wartość wielkości mierzonej dla pomiaru idealnego oblicza się z zależności funkcyjnej (4.11), dla warunków rzeczywistych funkcję tę można opisać następująco
)] (4.13)
Błąd pomiaru wielkości Obędzie w tych warunkach określony zależnością
Ay = ł"-y = (414)
Należy zatem określić w jaki sposób błędy wyznaczenia wielkości pośrednich X , , X2 ... X N przenoszą się na wynik pomiaru wielkości Y. Zależność miedzy błędem wyznaczenia wielkości Y a błędami AX,, AX2,... &XN wynika z prawa przenoszenia błędów.
Ze wzoru (4.15) w praktyce nie można korzystać, gdyż nie są znane błędy cząstkowe zarówno co do wartości, jak i znaku. Można jedynie wyznaczyć wartości graniczne błędów. Dla wyznaczenia błędu A7 wielkości mierzonej przyjmuje się najmniej korzystny przypadek, w którym błędy wielkości pośrednich
73
jednocześnie przyjmują wartości graniczne i mają te same znaki. Wyznaczony w tych warunkach błąd nosi nazwę błędu granicznego.
df A X |
+ r |
# A V |
+ .. *, |
• |
9/ A X |
|
ax,A«Xl V |
|
dx N S ;=i |
"s^z 2 df A |
|
|
ax ' w CTA N |
|
|
|
<*/' |
|
|
|
(4.16)
Wielkość
, jest pochodną cząstkową funkcji pomiaru względem zmien-
oX
nej X j , nazywa się współczynnikiem wrażliwości funkcji na zmiany wielkości wejściowej X . .
Błąd A g X j ; , który jest błędem całkowitym granicznym wielkości zmierzonej
metodą bezpośrednią wyznacza się tak, jak podano w punkcie 4.2. l .
Błąd graniczny dla najczęściej występujących funkcji pomiaru wyznaczają następujące zależności
v —
1 -
X
f — l
X,-X2
= CX"
x
y z x
Wielkości pośrednie X,, X2... XN, wyznacza się przeprowadzając serie pomiarów. Na podstawie uzyskanych wyników określa się wartość średnią, błąd systematyczny i błąd przypadkowy.
74
Wartość wielkości zmierzonej można wyznaczyć korzystając z zależności funkcyjnej na wartości średnie
F = /(X„X2...X„) (4.17)
lub wyznaczając wartości Yl,Y2...YN dla kolejnych wartości XH, X21 —XNi ... Xm,XN2...XNn, a następnie obliczyć wartość średnią
(4.18)
Jeżeli funkcja pomiaru jest funkcją liniową, to uzyskane wartości Y wg wzorów 4.17 i 4.18 będą takie same. Sposób drugi obliczania wartości mierzonej nie może być stosowany, jeżeli poszczególne wielkości pośrednie X,, X2... XN byty mierzone w seriach o różnej liczności.
Przykład 4.2
W celu wyznaczenia w badanym obwodzie natężenia prądu zmierzono napięcie na zaciskach rezystora wzorcowego, włączonego do tego obwodu. Napięcie zmierzono 5-ciokrotnie woltomierzem cyfrowym o zakresie Un = 100V, i rezystancji wejściowej Rv >109Q, dla którego błąd określony przez producenta jest równy 0,05% wartości znamionowej. Uzyskano następujące wartości C/,. = (80,03; 80,05; 80,06; 79,95; 79,98)V . Rezystor wzorcowy Rn = 100Q, klasy dokładności 0,02. Obliczyć graniczny błąd pomiaru.
Rozwiązanie
Ze względu na dużą rezystancję wejściową woltomierza, można pominąć jego wpływ na rozpływ prądów. Wartość średnia pomiaru napięcia.
Ux = - V U, = - 400,07 = 80,014V »w 5
Odchylenie standardowe wartości średniej
75
5(5-1)
= 0,0211 = 0,02 V
U*_ = 80,014 = /?„ 100
800 lmA
n |
<// |
(</,-",) |
(o, -"J |
1 |
80,03 |
0,016 |
2,56 -10"4 |
2 |
80,05 |
0,036 |
12,96 -10-4 |
3 |
80,06 |
0,046 |
21,16 -10"4 |
4 |
79,95 |
-0,064 |
40,96-1 0"4 |
5 |
79,98 |
-0,034 |
11,56-KT4 |
|
S |
0 |
89,2 -10-4 |
Błąd graniczny przypadkowy pomiaru napięcia dla k = 3
AjjŻ/, = 3 • 5^ = 3 • 0,0211 = 0,063V Błąd systematyczny graniczny woltomierza
&gSUx= 0,01 • 0,05 • 100 = 0,05V
Błąd graniczny całkowity pomiaru napięcia dla najniekorzystniejszego przypadku bgUx = &gSUx + bgRVx = 0,05 + 0,063 = 0,103V
Błąd graniczny opornika wzorcowego
Ax R„ = 0,01 • 0,02 • 100Q = 0,02Q
76
Korzystając z prawa przenoszenia błędów, błąd całkowity pomiaru natężenia prądu
g *
A„/ =
du
*,v*
g n
-A„/?
—0,103 + -ir- • 80,01 • 0,02 = 0,103 • 10"2 + 80,01 • 10~4 =
100 1002
= (0,103 + 0,8001)- 10~2 =9,OmA
Wynik pomiaru
= /± Ag /,= (800,1 ±9,0)mA
4.2.3. Błędy nadmierne i ich wykrywanie
W serii przeprowadzonych pomiarów mogą występować wartości znacznie różniące się od innych. Mówimy wówczas, że wyniki te są błędne, to znaczy obarczone błędami nadmiernymi. Błędy te zaliczamy do grupy błędów przypadkowych.
Jedną z głównych przyczyn występowania błędów nadmiernych jest nieuwaga mierzącego. Jeżeli wykonujemy tylko jeden pomiar, to ujawnienie tego błędu nie jest możliwe. Tylko wykonanie serii pomiarów pozwala na ujawnienie tych błędów. Istnieje wiele metod statystycznych pozwalających na ujawnienie, a tym samym na eliminację błędów nadmiernych. Można przyjąć, że błędy dla których prawdopodobieństwo wystąpienia jest mniejsze od pewnej założonej wartości np. p < P są pomyłkami. Przy określaniu wartości P posługujemy się często odchyleniem standardowym.
Jedną z prostszych metod wykrywania błędów nadmiernych jest metoda polegająca na przyjęciu, że p przyjmuje wartość prawdopodobieństwa odpowiadającego potrójnej wartości odchylenia standardowego. Oznacza to, że prawdopodobieństwo pojawienia się błędu większego od 35 jest mniejsze od 0,003. Można zatem uważać, że jeżeli w serii wyników pomiarów znajdzie się wynik różniący się od wartości średniej więcej niż o 35, to jest on prawdopodobnie spowodowany pomyłką.
Inną metodą jest metoda polegająca na określeniu, czy wynik budzący wątpliwości mieści się z założonym prawdopodobieństwem w określonym przedziale. Otrzymane w serii wyniki pomiarów porządkujemy według rosnących wartości, od wartości najmniejszej X{ do największej Xn. Odrzucamy wynik budzący
77
wątpliwość, może to być wynik najmniejszy lub największy. Dla pozostałych w serii wyników pomiarów o liczności n = n - 1 oblicza się wartość średnią i odchylenie standardowe pojedynczego pomiaru i odchylenie standardowe dla średniej.
n -l
$
oraz st
Przy próbie mało licznej (n < 30) dla założonego prawdopodobieństwa p oraz wynikającej z pomiaru liczby stopni swobody k = n' -1, wyznacza się z tablic rozkładu Studenta współczynnik t^. Następnie wyznacza się przedział, w którym może występować wartość poprawna mierzonej wielkości.
X-tkpS<X<X+tkpS
Jeżeli podejrzany wynik X, lub Xn nie mieści się w wyznaczonym przedziale [17] odrzucamy go przyjmując, że jest on obarczony błędem nadmiernym.
Przykład 4.3
W wyniku dwunastokrotnego pomiaru napięcia U otrzymano następujące wyniki X,= (1,022; 1,023; 1,024; 1,024; 1,025; 1,025; 1,025; 1,026; 1,026; 1,027; 1,028; 1,053)V. Sprawdzić metodą 3S i metodą przedziału, czy któryś z wyników pomiaru nie jest obarczony błędem nadmiernym. Obliczenia przeprowadzić dla p = 0,99.
Rozwiązanie
Wartość średnia
t/=J=L_ = lł328=i,027V
n 12
Wyniki dalszych obliczeń przedstawiono w tabeli
78
n |
u, |
U, -U |
(U i -U J -HT6 |
U, -U' |
(j/,.- u 'J -10^ |
|
V |
V |
V2 |
V |
v2 |
1 |
,022 |
- 0,005 |
25 |
-0,003 |
9 |
2 |
,023 |
-0,004 |
16 |
-0,002 |
4 |
3 |
,024 |
- 0,003 |
9 |
-0,001 |
1 |
4 |
,024 |
- 0,003 |
9 |
-0,001 |
1 |
5 |
,025 |
- 0,002 |
4 |
0,00 |
0 |
6 |
,025 |
- 0,002 |
4 |
0,00 |
0 |
7 |
1,025 |
- 0,002 |
4 |
0,00 |
0 |
8 |
1,026 |
- 0,001 |
1 |
0,001 |
1 |
9 |
1,026 |
- 0,001 |
1 |
0,001 |
1 |
10 |
1,027 |
0,00 |
0 |
0,002 |
4 |
11 |
1,028 |
0,001 |
1 |
0,03 |
9 |
12 |
1,053 |
0,026 |
476 |
- |
- |
S |
12,328 |
0 |
750 |
0 |
30 |
Odchylenie standardowe pojedynczego wyniku pomiaru
= 0,008V
Stosujemy kryterium 35.
Wartość 35 = 3 • 0,008 = 0,024 V
Z porównania wyników okazuje się, że wynik pomiaru 12 obarczony jest błędem przekraczającym wartość 35 (0,026 > 0,024). Wynik ten należy uznać za błędny.
Metoda wyznaczania podziału.
Z otrzymanych wartości wynik 12 budzi wątpliwości co do swojej wiarygodności. Zostaje on pominięty w obliczeniach. Obliczamy średnią na «' = n-l = 12-l = ll pomiarów
U' = -
11,275 11
= 1.025Y
Odchylenie standardowe pojedynczego pomiaru
79
S' = \|-ts!—. = IJ" tv/ - o,0017 « 0,002V
Dla poziomu ufności p = 0,99 i punktów swobody n-l = ll-l = 10 z tablic rozkładu Studenta znajdujemy współczynnik t^ = 3,169. Stąd
tkpS = 3,169-0,002 = 0,00634 » 0,006V
Dla U = 1,025V otrzymuje się przedział
1,025 - 0,006 < U < 1,025 + 0,006 l,019V<f/<l,031V z prawdopodobieństwem p = 0,99.
Znacznie różniąca się wartość U12 = 1,053V, nie mieści się w wyznaczonym
przedziale. Powinna zostać pominięta w dalszej analizie jako wartość obarczona błędem nadmiernym.
5
NIEPEWNOŚCI WYNIKU POMIARU
5.1. PODSTAWY TEORII NIEPEWNOŚCI
Teoria niepewności przyjmuje losowy model niedokładności zakładając, że wartość oczekiwana X, estymata wielkości mierzonej e(x) jest jedną z wartości zmiennej losowej X o wartościach danych przez hipotetyczne doświadczenie pozyskiwania estymaty X. Niedokładność pomiaru charakteryzuje się w tym przypadku za pomocą parametru zwanego niepewnością. Niepewność w [3] definiowana jest jako parametr związany z wynikiem pomiaru charakteryzujący rozrzut wartości, które można w uzasadniony sposób przypisać wartości mierzonej. Takim parametrem może być na przykład odchylenie standardowe (lub jego wielokrotność), albo połowa szerokości przedziału odpowiadającego określonemu poziomowi ufności. Niepewność pomiaru zawiera na ogół wiele składników. Niektóre z nich można wyznaczyć na podstawie rozkładu statystycznego wyników szeregu pomiarów i można je scharakteryzować odchyleniem standardowym. Inne składniki pochodzące na przykład od efektów systematycznych są szacowane na podstawie zakładanych rozkładów prawdopodobieństwa opartych na posiadanym doświadczeniu lub uzyskiwanych z innych źródeł.
Niedokładność pomiaru charakteryzuje się przez podanie niepewności standardowej, niepewności łącznej i niepewności rozszerzonej.
Niepewność standardowa u(x) wyrażana jest przez odchylenie standardowe wyników szeregu pomiarów wykonywanych w niezmiennych warunkach odniesienia.
u(x) = S (5.1)
Niepewność złożona (łączna), to niepewność standardowa wyniku pomiaru otrzymanego na podstawie pomiaru kilku wielkości, równa pierwiastkowi kwadratowemu z sumy składników będących wariancjami i kowariancjami tych wielkości pomnożonymi przez odpowiednie współczynniki zależne od funkcji pomiaru
81
(5.2)
Tabela 5.1
t\«D |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0,0 i |
0,00000 03983 |
0,00399 04380 |
0,00798 04776 |
0,01197 05172 |
0,01595 05567 |
0,01994 05962 |
0,02392 06356 |
0,02790 06749 |
0,03188 07142 |
0,03586 07535 |
2 |
07926 |
0,8317 |
08706 |
09095 |
09483 |
09871 |
10257 |
10642 |
11026 |
11400 |
3 |
11791 |
12172 |
12552 |
12930 |
13307 |
13683 |
14058 |
14431 |
14803 |
15173 |
4 |
15542 |
15910 |
16276 |
16640 |
17003 |
17364 |
17724 |
18082 |
18439 |
18793 |
0,5 |
0,19146 |
0,19497 |
0,19847 |
0,20194 |
0,20540 |
0,20884 |
0,21226 |
0,21566 |
0,21904 |
0,22240 |
6 |
22575 |
22907 |
23237 |
23565 |
23891 |
24215 |
24537 |
24857 |
25175 |
25490 |
7 |
25804 |
26115 |
26424 |
26730 |
27035 |
27337 |
27637 |
27935 |
28230 |
28524 |
8 |
28814 |
29103 |
29389 |
29673 |
29955 |
30234 |
30511 |
30785 |
31057 |
31327 |
9 |
31594 |
31859 |
32121 |
32381 |
32639 |
32894 |
33147 |
33398 |
32646 |
33891 |
1,0 |
34134 |
34375 |
34614 |
34850 |
35083 |
35314 |
35543 |
35769 |
35993 |
36214 |
1 |
36433 |
36650 |
36864 |
37076 |
37286 |
37493 |
37698 |
37900 |
38100 |
38298 |
2 |
38493 |
38686 |
38877 |
39065 |
39251 |
39435 |
39617 |
39796 |
39973 |
40147 |
3 |
40320 |
40490 |
40658 |
40824 |
40988 |
41149 |
41309 |
41466 |
41621 |
41774 |
4 |
41924 |
42073 |
42220 |
42364 |
42507 |
42647 |
42786 |
42922 |
43056 |
41389 |
5 |
43319 |
43448 |
43574 |
43699 |
43822 |
43943 |
44062 |
44179 |
44295 |
44408 |
6 |
44520 |
44630 |
44738 |
44845 |
44950 |
45053 |
45154 |
45254 |
45352 |
45449 |
7 |
45543 |
45637 |
45728 |
45818 |
45907 |
45994 |
46080 |
46164 |
46246 |
46327 |
8 |
46407 |
46485 |
46562 |
46638 |
46712 |
46784 |
46856 |
46926 |
46995 |
47062 |
9 |
47128 |
47193 |
47257 |
47320 |
47381 |
47441 |
47500 |
47558 |
47615 |
47670 |
2,0 |
47725 |
47778 |
47831 |
47882 |
47932 |
47982 |
48030 |
48077 |
48124 |
48169 |
1 |
48214 |
48257 |
48300 |
48341 |
48382 |
48422 |
48461 |
48500 |
48537 |
48574 |
2 |
48610 |
48645 |
48679 |
48713 |
48745 |
48778 |
48809 |
48840 |
48870 |
48899 |
3 |
48928 |
48956 |
48983 |
49010 |
49036 |
49061 |
49086 |
49111 |
49134 |
49158 |
4 |
49180 |
49202 |
49224 |
49245 |
49266 |
49286 |
49305 |
49324 |
49343 |
49361 |
2,5 |
49379 |
49396 |
49413 |
49430 |
49446 |
49461 |
49477 |
49492 |
49506 |
49520 |
6 |
49534 |
49547 |
49560 |
49573 |
49586 |
49598 |
49609 |
49621 |
49632 |
49643 |
7 |
49653 |
49664 |
49674 |
49683 |
49693 |
49702 |
49711 |
49720 |
49728 |
49737 |
8 |
49745 |
49752 |
49760 |
49767 |
49774 |
49781 |
49788 |
49795 |
49801 |
49807 |
9 |
49813 |
49819 |
49825 |
49831 |
49836 |
49841 |
49846 |
49851 |
49856 |
49861 |
3,0 |
49865 |
49869 |
49874 |
49878 |
49882 |
49886 |
49889 |
49893 |
49897 |
49900 |
1 |
49903 |
49906 |
49910 |
49913 |
49916 |
49918 |
49921 |
49924 |
49926 |
49929 |
2 |
49931 |
49934 |
49936 |
49938 |
49940 |
49942 |
49944 |
49946 |
49948 |
49950 |
3 |
49952 |
49953 |
49955 |
49957 |
49958 |
49960 |
49961 |
49962 |
49964 |
49965 |
4 |
49966 |
49968 |
49969 |
49970 |
49971 |
49972 |
49973 |
49974 |
49975 |
49976 |
5 |
49977 |
49978 |
49978 |
49979 |
49980 |
49981 |
49981 |
49982 |
49983 |
49983 |
6 |
49984 |
49985 |
49985 |
49986 |
49986 |
49987 |
49987 |
49988 |
49988 |
49989 |
7 |
49989 |
49990 |
49990 |
49990 |
49991 |
49991 |
49992 |
49992 |
49992 |
49992 |
8 |
49993 |
49993 |
49993 |
49994 |
49994 |
49994 |
49994 |
49995 |
49995 |
49995 |
9 |
49995 |
49995 |
49996 |
49996 |
49996 |
49996 |
49996 |
49996 |
49997 |
49997 |
82
Niepewność rozszerzona, to wielkość określająca przedział wartości wokół wyniku pomiaru, jest ona równa iloczynowi niepewności złożonej i współczynnika rozszerzenia k
U = ku,(y) (5.3)
Współczynnik rozszerzenia zależy od przyjętego poziomu ufności i rozkładu zmiennej losowej x. W przypadku, gdy współczynnik k jest powiązany z poziomem ufności p to zapisuje się go jako kp i wtedy niepewność rozszerzona jest
oznaczona przez U p i wynosi
U=kpu,(y) (5.4)
Tabela 5.2
Rozkład f-Studenta o k stopniach swobody
Liczba stopni swobody k |
Poziom ufności |
|||||
|
68,27 |
90 |
95 |
95,45 |
99 |
99,73 |
1 |
1,84 |
6,31 |
12,71 |
13,97 |
63,66 |
235,80 |
2 |
1,32 |
2,92 |
4,30 |
4,53 |
9,92 |
19,21 |
3 |
1,20 |
2,35 |
3,18 |
3,31 |
5,84 |
9,22 |
4 |
1,14 |
2,13 |
2,78 |
2,87 |
4,60 |
6,62 |
5 |
1,11 |
2,02 |
2,57 |
2,65 |
4,03 |
5,51 |
6 |
1,09 |
1,94 |
2,45 |
2,52 |
3,71 |
4,90 |
7 |
1,08 |
1,89 |
2,36 |
2,43 |
3,50 |
4,53 |
8 |
1,07 |
1,86 |
2,31 |
2,37 |
3,36 |
4,28 |
9 |
1,06 |
1,83 |
2,26 |
2,32 |
3,25 |
4,09 |
10 |
1,05 |
1,81 |
2,23 |
2,28 |
3,17 |
3,96 |
11 |
1,05 |
1,80 |
2,20 |
2,25 |
3,11 |
3,85 |
12 |
1,04 |
1,78 |
2,18 |
2,23 |
3,05 |
3,76 |
13 |
1,04 |
1,77 |
2,16 |
2,21 |
3,01 |
3,69 |
14 |
1,04 |
1,76 |
2,14 |
2,20 |
2,98 |
3,64 |
15 |
1,03 |
1,75 |
2,13 |
2,18 |
2,95 |
3,59 |
16 |
1,03 |
1,75 |
2,12 |
2,17 |
2,92 |
3,54 |
17 |
1,03 |
1,74 |
2,11 |
2,16 |
2,90 |
3,51 |
18 |
1,03 |
1,73 |
2,10 |
2,15 |
2,88 |
3,48 |
19 |
1,03 |
1,73 |
2,09 |
2,14 |
2,86 |
3,45 |
20 |
1,03 |
1,72 |
2,09 |
2,13 |
2,85 |
3,42 |
25 |
1,02 |
1,71 |
2,06 |
2,11 |
2,79 |
3,33 |
30 |
1,02 |
1,70 |
2,04 |
2,09 |
2,75 |
3,27 |
35 |
1,01 |
1,70 |
2,03 |
2,07 |
2,72 |
3,23 |
40 |
1,01 |
1,68 |
2,02 |
2,06 |
2,70 |
3,20 |
45 |
1,01 |
1,68 |
2,01 |
2,06 |
2,69 |
3,18 |
50 |
1,01 |
1,68 |
2,01 |
2,05 |
2,68 |
3,16 |
100 |
1,005 |
1,660 |
1,984 |
2,025 |
2,626 |
3,077 |
oo |
1,000 |
1,645 |
1,960 |
2,000 |
2,576 |
3,000 |
83
Jeżeli zmienna x ma rozkład normalny, to współczynnik rozszerzenia, dla określonego poziomu ufności, jako współczynnik za wyznacza się z tablic statystycznych rozkładu normalnego (tabela 5.1). Przy niezbyt licznej próbie (mała liczba wyników pomiaru, n< 30) rozkład normalny zastępuje się rozkładem Studenta. W tym przypadku współczynnik rozszerzenia przyjmuje wartości współczynnika rozkładu ^-Studenta dla określonej liczby stopni swobody równej liczbie pomiarów pomniejszonej o jeden i określonego poziomu ufności (tabela 5.2).
Jeżeli są trudności z wyznaczeniem współczynnika rozszerzenia dla zaistniałych warunków pomiarowych, to zwykle przyjmuje się kp = 3 i przypisuje się
mu poziom ufności p = 0,99 lub kp =2 i przypisuje się mu poziom ufności p = 0,95.
Niepewność pomiaru może zawierać wiele składowych jak np. niepełna definicja wielkości mierzonej, niedoskonała realizacja definicji wielkości mierzonej, sposób pobierania próbek wielkości mierzonej, wpływ czynników zewnętrznych, rozdzielczość przyrządów pomiarowych, przybliżenia i założenia wynikające z metody pomiarowej, niedokładność wzorców.
Niektóre z tych niepewności można wyznaczyć na podstawie otrzymanego rozrzutu wyników serii pomiarów i inne, które ocenia się na podstawie przewidywanych rozkładów prawdopodobieństwa.
Te dwie, różne pod względem sposobu otrzymywania grupy niepewności, stanowią podstawę do podziału niepewności na dwa typy:
niepewności typu A, wyznaczane metodami statystycznymi, niepewności typu B, wyznaczane innymi metodami.
Niepewność typu A, ze względu na źródła jej powstawania można przyjąć, że odpowiada błędom spowodowanym efektami przypadkowymi, natomiast niepewność typu B odpowiada błędom spowodowanym efektami systematycznymi. Przy analizie niepewności pomiaru, typu A i typu B, zakłada się, że wszystkie znane poprawki zostały uwzględnione w wyniku pomiaru. Każda niepewność systematyczna o znanej wartości i znaku musi być uwzględniona w postaci poprawki, jeżeli nie jest znana jej wartość, musi być traktowana jako niepewność dodatkowa. Niepewność ta ma charakter losowy. Należy ocenić miarę liczbową tej niepewności, którą jest odchylenie standardowe. Jeżeli niepewność ta jest wywołana przez efekty systematyczne, której najczęstszym źródłem jest błąd aparatury pomiarowej, to wartość graniczna A? tego błędu umożliwia wyznaczenie
wariancji dla przyjętego rozkładu prawdopodobieństwa.
84
5.2. PRAWO PROPAGACJI NIEPEWNOŚCI
W pomiarach pośrednich mierzona wielkość jest funkcją wielu zmiennych Jeżeli funkcja pomiaru jest liniowa, to zmienne Xy są zmiennymi losowymi
o wartościach średnich odpowiednio Xjt a średnia mierzonej wielkości Y jest funkcją zmiennych Xy
(5.5)
Każda z wielkości Xj wyznaczona jest z niepewnością standardową s(Xj) lub niepewnością łączną MT(*y). Jeżeli wielkości Xj są nieskorelowane, wówczas niepewność uT(y) mierzonej wielkości określona jest zależnością
(5.6)
W odniesieniu do wartości średnich wartość niepewności wyraża zależność
(5.7)
Gdy funkcja pomiaru charakteryzuje się znaczną nieliniowością wówczas przy rozwinięciu jej w szereg Taylora należy uwzględnić wyrazy wyższego rzędu. Najważniejszymi wyrazami wyższych rzędów są
N N
ZE
a2/ l , a/ a3/
u2(xi)u2(xj) (5.8)
Wyrazy te powinny być uwzględnione przy obliczaniu niepewności łącznej.
Jeżeli wielkości pośrednie Xt,X2 ... XN są ze sobą skorelowane, występuje między nimi zależność funkcyjna, to oprócz obliczenia wariancji, dla wyznaczę-
85
nią niepewności trzeba także wyznaczyć kowariancję i wówczas niepewność łączna będzie określona wzorem
w którym: .k,-,*,- są oszacowaniami wartości wielkości X, i X;,
-^—,—ł— są pochodnymi cząstkowymi funkcji pomiaru względem X i X ,,
y
u(xj , *; ) jest kowariancją je, i x j .
Kowariancje u(xi,xj ) oblicza się ze wzoru
"v" t=i
w którym Xilc,Xjk są A:-tym wynikiem bezpośredniego pomiaru wielkości X-, lub Xy. .
Dla oceny stopnia zależności miedzy poszczególnymi wielkościami Xt i X;. wyznacza się współczynnik korelacji
u(x ,jc
Wyznaczona kowariancja m(jc,.;jc;) jest równa kowariancji średnich ^(jć,;3ć; i wówczas wzór 5. 1 1 przyjmuje postać
(5-12)
Jeżeli O < r < l , to jest to korelacja dodatnia, dla - 1 < r < O mamy do czynienia z korelacją ujemną. Im większa wartość r, tym większa zależność między X, i Xy,przy r = O , wielkości te nie są skorelowane.
86
Jeżeli znany jest współczynnik korelacji, to estymator konwariancji przy dwóch wielkościach oblicza się ze wzoru
";,ą =uM-uA2-r(x„x2) (5.13)
Wielkości um i uA2 oznaczają niepewności typu A dla wielkości X,,X2.
5.3. OCENA NIEPEWNOŚCI W POMIARACH BEZPOŚREDNICH
5.3.1. Ocena niepewności typu A
W pomiarach bezpośrednich mogą występować niepewności typu A i niepewności typu B. Zostanie rozpatrzony przypadek, gdy niepewność typu A jest dużo większa od niepewności typu B.
ua»ub (5.14)
W praktyce można uznać, że spełniony jest warunek ua » ub , jeżeli uB<0,luA.
Niepewność standardową typu A ocenia się za pomocą metod statystycznych. Na podstawie serii pomiarów oblicza się wartość średnią
i (5.15)
"w
oraz niepewność standardową typu A
E (*,-*)
Przyjmuje się, że w wynikach pomiarów zostały uwzględnione wszystkie poprawki.
87
Ponieważ występuje tylko jedna niepewność ua , to niepewność łączna jest równa tej niepewności
"b =«a (5-17)
MT =TU
Niepewność rozszerzona jest równa niepewności łącznej pomnożonej przez współczynnik rozszerzenia kp.
U = kau, (5.18)
Współczynnik rozszerzenia, przy dużej liczbie pomiarów, gdy można uważać, że rozkład zmiennej losowej Xjest rozkładem normalnym, przyjmuje wartości zmiennej standaryzowanej Z dla tego układu.
Wartości zmiennej Z odczytuje się z tablic rozkładu normalnego dla określonego poziomu ufności p. Najczęściej stosowane wartości zmiennej Z dla określonego poziomu ufności p przedstawiono w tabeli 5.3.
Vybrane wartości współczynnika Z dla rozkładu normalnego Tabela 5.3 |
||||||
P |
0,6827 |
0,900 |
0,950 |
0,9545 |
0,990 |
0,9973 |
Z |
1,000 |
1,645 |
1,96 |
2,000 |
2,576 |
3,000 |
Dla innych wartości poziomu ufności współczynnik Z można wyznaczyć korzystając z tabeli 5.1.
Jeżeli liczba pomiarów nie jest zbyt duża n < 30, to współczynnik rozszerzenia przyjmuje wartość zmiennej standaryzowanej rozkładu f-Studenta. Wartość tego współczynnika odczytuje się z tablic rozkładu Studenta dla założonego poziomu ufności p i dla liczby stopni swobody równej k = n -1. Dla przypadku, gdy rozkład zmiennej losowej nie może być uznany za rozkład normalny, ani za rozkład f-Studenta, to przyjmuje się arbitralnie współczynnik rozszerzenia równy 2 lub 3 uznając, że tym wartościom odpowiadają poziomy ufności p odpowiednio równe 0,95 i 0,99.
Przykład 5.1
Woltomierzem cyfrowym o napięciu znamionowym 100V i błędzie granicznym równym Ag = 0,0217,, +0,01f/n, zmierzono sześciokrotnie napięcie. Otrzymano
następujące wartości: Ut = (80,42; 80,92; 80,31; 80,02; 80,56; 80,96)V. Obliczyć niepewność pomiaru napięcia na poziomie ufności p = 0,95.
88
Rozwiązanie
Wartość średnia mierzonego napięcia
«/=-!>,=
"w
483,19 6
= 80,53V
Tabelaryczne przedstawienie wyników obliczeń
n |
tf, |
fr -U) |
fo-zry |
|
V |
V |
V2 |
1 |
80,42 |
-0,11 |
0,0121 |
2 |
80,92 |
0,39 |
0,1521 |
3 |
80,31 |
-0,22 |
0,0484 |
4 |
80,02 |
-0,57 |
0,2601 |
5 |
80,56 |
0,03 |
0,0009 |
6 |
80,96 |
0,43 |
0,1849 |
S |
483,19 |
0 |
0,6585 |
Niepewność standardowa typu A
= 0,148 IV
Sprawdzamy, czy niepewność typu A jest niepewnością dominującą. W tym celu wyznacza się niepewność typu B wnoszona przez woltomierz. Zakładając, że rozkład prawdopodobieństwa błędu miernika jest rozkładem równomiernym, niepewność standardowa typu B będzie równa
mb =•
d = ^(0,02-80,53+ 0,01-100) = 0,0150V
Ponieważ niepewność mA= 0,148IV jest znacznie większa od niepewności ub =0,0150V, to można uznać, że ua jest niepewnością dominującą i w obliczeniach można pominąć niepewność ub .
89
Niepewność łączna pomiaru napięcia będzie równa
Liczba pomiarów jest mało liczna n = 6 , to dla obliczenia niepewności rozszerzonej na poziomie ufności p = 0,95 należy wyznaczyć współczynnik t kp dla
rozkładu Studenta. Liczba stopni swobody k = n - 1 = 5 .
Z tablic rozkładu Studenta dla p = 0,95 i k = 5 współczynnik tkp = 2,57 .
Niepewność rozszerzona pomiaru napięcia
Uf = kpu^ = r^Mt = 2,57 • 0,1481 = 0,3806V = 0,39V
Wynik pomiaru napięcia można zapisać następująco
Ux=U±Up= (80,53 ± 0,39) V
5.3.2. Ocena niepewności typu B
W pomiarach wykonywanych w warunkach przemysłowych, gdy stosuje się aparaturę pomiarową mniej dokładną może wystąpić przypadek, gdy niepewność typu A jest dużo mniejsza od niepewności typu B tj. ua < 0,1 ug . Oznacza to, że
dominującą niepewnością jest niepewność typu B. Jest to niepewność wywołana przez efekty systematyczne, a jej źródłem jest niedokładność aparatury pomiarowej. Niepewność standardową typu B można ocenić w zależności od posiadanych informacji, takich jak np.:
właściwości przyrządów i metod pomiarowych,
danych kalibracyjnych przyrządu,
informacji podanych przez producenta,
danych z wcześniejszych pomiarów.
Dla danej wielkości przyporządkowuje się określony rozkład prawdopodobieństwa i oblicza odchylenie standardowe. W praktyce najczęściej mamy do czynienia z sytuacją obliczania niepewności typu B wynikającej z błędów aparatury pomiarowej. Stosowaną aparaturę pomiarową charakteryzuje się za pomocą wartości błędu granicznego określonego przez wskaźnik klasy dokładności. Rozkład błędów aparatury pomiarowej może być różnorodny, najczęściej jest to rozkład jednostajny, rzadziej rozkład trójkątny.
90
-A.
Rys.5.1. Rozkład jednostajny i trójkątny
Dla rozkładu jednostajnego i trójkątnego wariancję i odchylenie standardowe określają zależności
Niepewność łączna dla tego przypadku mt = ub . Niepewność rozszerzoną wyznacza się ze wzoru
(5.20)
Dla rozkładu jednostajnego współczynnik rozszerzenia, w zależności od poziomu ufności, będzie miał wartość
kp=j3-p (5.21)
Dla p = l, kp - >/3 niepewność rozszerzona jest równa błędowi granicznemu U p = Ag . Jest to najczęściej spotykany w praktyce przypadek.
Przykład 5.2
Woltomierzem magnetoelektrycznym klasy 0,5 o zakresie znamionowym 100V zmierzono napięcie uzyskując wynik Ux = 80,2V. Obliczyć niepewność pomiaru na poziomie ufności p - 0,95.
Rozwiązanie
Przyjmując, że rozkład prawdopodobieństwa błędu miernika jest rozkładem równomiernym, niepewność standardowa typu B będzie równa
91
,*>iy..Ml.M.|flO.
Niepewność typu B jest niepewnością dominującą, niepewność typu A jest pomijalnie mała.
Niepewność łączna jest równa niepewności standardowej mt = ub . Niepewność rozszerzona
Współczynnik rozszerzenia, dla jednostajnego rozkładu błędów miernika dla poziomu ufności p oblicza się ze wzoru
Jtp=VŚp = V3- 0,95 = 1,645
Stąd niepewność rozszerzona
Uf = kpuT = 1,645 • 0,289 = 0,475 » 0,5V
Wynik pomiaru napięcia
Ux=U±Up=8Q,2V±0,5V
5.3.3. Ocena niepewności typu A i B
W praktyce najczęściej występuje przypadek, gdy niepewności typu A mają rozkład bliski rozkładowi normalnemu, a niepewności typu B są spowodowane przez błędy aparatury pomiarowej o rozkładzie równomiernym.
Niepewności typu A i B wyznacza się tak, jak to podano w punkcie 5.3.1 i 5.3.2. Znając wartości tych niepewności wyznacza się niepewność łączną.
+ " (5-22)
Niepewność rozszerzoną określa zależność
92
Współczynnik rozszerzenia kp ma wartość zależną od przyjętego poziomu
ufności oraz rozkładu wypadkowego wynikającego ze złożenia rozkładu normalnego (niepewność typu A) i rozkładu jednostajnego (niepewność typu B).
Rozkład wynikający ze złożenia rozkładu normalnego i rozkładu jednostajnego opisany jest splotem tych rozkładów. Wyznaczenie splotów rozkładu normalnego i jednostajnego stwarza wiele problemów. W praktyce stosuje się różne metody przybliżone umożliwiające wyznaczenie współczynnika rozszerzenia.
Jedną z tych metod jest metoda oparta na hipotezie, że nieznany splot rozkładów składowych jest zbieżny do rozkładu składowego o większym odchyleniu standardowym. Gdy SN > Sj , to splot rozkładu normalnego i jednostajnego jest zbieżny do rozkładu normalnego. Współczynnik rozszerzenia przyjmuje wówczas wartości zmiennej standaryzowanej Z rozkładu normalnego, dla określonego poziomu ufności.
Jeżeli SN <Sj, odchylenie standardowe rozkładu normalnego jest mniejsze od odchylenia standardowego rozkładu jednostajnego, to splot rozkładów normalnego i jednostajnego jest zbieżny do rozkładu jednostajnego. Współczynnik rozszerzenia przyjmuje wówczas wartości zmiennej standaryzowanej rozkładu jednostajnego k}.
Niepewność rozszerzoną określa zależność
l/=Mt (5-24)
Dla SN ~ S j ocena niepewności rozszerzonej jest niejednoznaczna, zaleca się
w tym przypadku przyjęcie współczynnika rozszerzenia takiego, jak dla rozkładu normalnego.
Przykład 5.3
Watomierzem elektrodynamicznym klasy dokładności 0,2; Pn = 500W; Un = 100V ; /„ = 5A zmierzono moc odbiornika przy prądzie stałym w układzie
o zadanym napięciu. Pomiar wykonano pięciokrotnie. Uzyskano następujące wartości: P = (358,1; 358,4; 357,8; 357,5; 357,5)W.
Rezystancja obwodu napięciowego watomierza Rwn = 10000Q, rezystancja woltomierza Rv >109Q. Wyznaczyć niepewność wyniku pomiaru na poziomie ufności p = 0,95.
93
Rozwiązanie
Ze wskazań watomierza nie wynika, aby któryś wynik był obarczony błędem nadmiernym.
Wartość średnia pomiaru mocy
» w
1790,3
= 358,06 W
Zestawienie wyników obliczeń
n |
p, |
ti-f) |
k -n |
|
w |
W |
w2 |
1 |
358,1 |
0,04 |
0,0016 |
2 |
358,4 |
0,34 |
0,1156 |
3 |
357,8 |
-0,26 |
0,0676 |
4 |
357,5 |
-0,56 |
0,3136 |
5 |
358,5 |
0,44 |
0,1936 |
E |
1790,3 |
0 |
0,692 |
Niepewność standardowa typu A
n(n-l) \ 5(5-1)
= 0,186 W
Niepewność standardowa typu B. Rozkład jednostajny błędów watomierza. 0,01- Sg-Pn 0,01-0,2-500
M„ =-
• = 0,577 W
Niepewność typu A i B są tego samego rzędu. Niepewność łączna
+0.5772 =0,606W
94
Niepewność typu B, rozkład jednostajny, jest większa od niepewności typu A, rozkład normalny. Współczynnik rozszerzenia w tym przypadku zostaje przyjęty, tak jak dla rozkładu jednostajnego.
)t p=V3-p = V3- 0,95 = 1,645
Niepewność rozszerzona
Up=kp-u^= 1,645 • 0,606 = 0,997 » 1,OW
Poprawka do wyniku pomiaru wynikającego z mocy pobranej przez obwód napięciowy watomierza
2
R 10000 Moc odbiornika
P0=Pw-Pm,= 358,1 - 1,0 = 357.1W Wynik pomiaru
P = P±Up= 357,1W ± 1,OW
5.4. OCENA NIEPEWNOŚCI W POMIARACH POŚREDNICH
5.4.1. Ocena niepewności typu A
W pomiarach pośrednich, jak to przedstawiono w punkcie 5.1, wielkość mierzona 7 jest funkcją wielkości X j mierzonych bezpośrednio. Każda z wielkości
X j jest wyznaczana na podstawie serii pomiarów, z których oblicza się wartość
średnią i niepewność standardową dla średniej Y .
Rozpatrywany jest przypadek, w którym niepewność typu A jest niepewnością dominującą, to znaczy ua »ub, podobnie jak w punkcie 5.3. l.
Wartość wielkości mierzonej wyznacza się ze wzoru
F = /(*,) (5.25)
95
a niepewność standardową dla średniej Y, dla przypadku, gdy funkcja Y = f (X j) jest praktycznie liniowa, z zależności
<5-26'
Przy dużej nieliniowości funkcji pomiaru, należy uwzględnić wyrazy wyższego rzędu w szeregu Taylora (zależność 5.8). Jeżeli zmienne losowe są wzajemnie zależne, to należy obliczyć kowariancję według zależności (5.9).
Niepewność łączna, ponieważ występuje tylko niepewność typu A, jest równa tej niepewności ur = uaj .
Dla oceny niepewności rozszerzonej trzeba wyznaczyć współczynnik rozszerzenia, jego wartość, jak już uprzednio podano, jest zależna od przyjętego poziomu ufności i rozkładu prawdopodobieństwa wielkości Y . Rozkład ten jest splotem rozkładów Xj . Wyznaczenie splotu rozkładów Xj nastręcza wiele trudno-
ści i w praktyce operacji tych dokonuje się w wyjątkowych przypadkach.
Jeśli pomiary poszczególnych wielkości są liczne n > 30 , to rozkłady śred-
nich Xj są zbieżne do rozkładu normalnego.
Zgodnie z centralnym twierdzeniem granicznym splotem rozkładów normalnych jest rozkład normalny, nawet jeżeli liczba wielkości X j jest ograniczona
np. występują dwie wielkości X, i X2. Można w tym przypadku przypisać
wartościom współczynnika rozszerzenia wartości zmiennej standaryzowanej Z z tablic rozkładu normalnego dla założonego poziomu ufności (prawdopodobieństwa) .
Dla prób mało licznych n< 30 przyjmuje się, że najlepszym przybliżeniem
rozkładu średniej Xj jest rozkład Studenta. Splot rozkładów Studenta nie jest
rozkładem Studenta. Można jednak rozkład ten przybliżyć rozkładem Studenta wyznaczając efektywną liczbę stopni swobody me zgodnie z regułą Welcha-Satterwhite'a.
U
i--4t
£">«*/
(5-27)
96
gdzie: uAy - niepewność standardowa dla średniej Y (zależność 5.26), m^. - niepewność standardowa dla średniej Xj.
Jeżeli liczba me uzyskana w wyniku obliczeń nie jest liczbą całkowitą, to należy zaokrąglić ją do najbliższej liczby całkowitej, zawsze w dół.
Przykład 5.4
Aby wyznaczyć objętość walca zmierzono jego średnicę mikromierzem i wysokość za pomocą suwmiarki. Każdą z tych wielkości mierzono pięciokrotnie. Uzyskano następujące wyniki pomiaru: d= (10,21; 10,00; 9,81; 10,22; 10,31)mm, h = = (50,3; 50,4; 50,5; 49,8; 49,5)mm. Ocenić granice niepewności wyniku pomiarów dla p = 0,95 .
Rozwiązanie
Rozrzut otrzymanych wyników nie wskazuje na popełnienie błędu nadmiernego. Średnie wartości pomiaru średnicy i wysokości
- 1A. 50,55 1A11 d = — > d. ,= - = 10,1 Imm
M '•» ^
250,0
50,0mm
Zestawienie wyników obliczeń
n |
<</ |
(di-d) |
fc-tf |
h, |
(*,-*) |
b-if |
|
mm |
mm |
mm2 |
mm |
mm |
mm2 |
1 |
10,21 |
0,10 |
0,0100 |
50,3 |
0,3 |
0,09 |
2 |
10,00 |
-0,11 |
0,0121 |
50,4 |
0,4 |
0,16 |
3 |
9,81 |
-0,30 |
0,0900 |
50,0 |
0,0 |
0,00 |
4 |
10,22 |
0,11 |
0,0121 |
49,8 |
-0,2 |
0,04 |
5 |
10,31 |
0,20 |
0,400 |
49,5 |
-0,5 |
0,25 |
E |
50,55 |
0 |
0,1642 |
250,0 |
0 |
0,54 |
Odchylenie standardowe średniej wartości średnicy
97
Odchylenie średnie kwadratowe dla średniej wysokości
= 0,16mm
Wyznaczenie niepewności standardowych typu B. Założono równomierny rozkład błędów dla mikromierza i suwmiarki.
_ Ag</ _ 0,01
U OJ •" —«." *~ >-_~ '
MBA=-- = -J*> V3
Wartości te są mniejsze od odpowiednich wartości niepewności typu A i zostają pominięte w obliczeniach. Można zatem przyjąć, że dominującymi są niepewności typu A.
Niepewność standardowa łączna
Objętość walca oblicza się ze wzoru
"41 Zatem niepewność łączną
98
= . --10,11-50,0 -0,092+ --10,1 r -0,162 =
V 2 4
= V5107,0+ 164,8 = 72,6mm3
Ze względu na to, że liczba pomiarów jest niewielka n < 30, współczynnik rozszerzenia należy wyznaczyć dla rozkładu f-Studenta, dla p = 0,95 i efektywnej liczby stopni swobody.
Liczbę efektywnych stopni swobody oblicza się ze wzoru
ut 27,8-10*
=5
d/Y 4 (# Y 4
vr K</ +i "M,
od j l d/i J
- (26,05 -106)
Z tablic rozkładu t-Studenta dla me = 5 i p = 0,95 współczynnik f ^ = 2,57 . Niepewność rozszerzona
U=kp-u„= 2,57 • 72,6 = 186,58 »190mm3
Objętość walca
l 2 l 2 3
-- _-.,._ , mm
Wynik pomiaru
V=4010mm3±190mm3
5.4.2. Ocena niepewności typu B
W pomiarach pośrednich, przy ocenie niepewności należy uwzględnić więcej niż jedną niepewność standardową. Niepewności typu A są pomijalnie małe. Podobnie jak w punkcie 5.4.1 wartość mierzonej wielkości Y, oraz odchylenie standardowe tej wielkości wyznacza się z zależności
99
Y=f(x,) oraz «^= l£ JL u2Bi (5.28)
V J'1 \ ' J
Niepewność rozszerzoną oblicza się z zależności
Aby w tych przypadkach określić wartość współczynnika rozszerzenia, dla danego poziomu ufności należy znać splot rozkładów wielkości pośrednich X}.
Niepewności typu B wynikające z błędów aparatury pomiarowej, przyjmuje się, że mają rozkład jednostajny. Można przyjąć, że splot trzech lub większej liczby rozkładów jednostajnych staje się zbieżny do rozkładu normalnego. Współczynnik rozszerzenia dla założonego poziomu ufności określa się z tablic rozkładu normalnego.
Jeżeli w układzie pomiarowym będą występować dwie składowe niepewności typu B, mbi i uB2, wtedy łączna niepewność standardowa przy założeniu, że
| -^7- [ = 1, będzie określona zależnością
;,+«& (5-29)
Rozkłady niepewności uBl i uB2, są rozkładami jednostajnymi, splot tych rozkładów jest rozkładem trapezowym. Gdy błędy graniczne as, i Ag2 przyrządów pomiarowych są sobie równe, to splot rozkładów jednostajnych jest rozkładem trójkątnym. Współczynnik rozszerzenia dla rozkładu trójkątnego, dla danego poziomu ufności określa zależność
kp=j6-p
Dla innych sytuacji można przyjąć współczynnik rozszerzenia równy 2 dla poziomu ufności p = 0,95 lub 3 dla p = 0,99 .
Przykład 5.5
Metodą techniczną woltomierza i amperomierza wyznaczono rezystancję. Napięcie na oporniku zmierzono woltomierzem magnetoelektrycznym klasy 0,5 o napięciu znamionowym Un =10V, natomiast do pomiaru natężenia prądu użyto
amperomierza magnetoelektrycznego klasy 0,5 o prądzie znamionowym /„ = 1A.
100
W wyniku przeprowadzonego pomiaru otrzymano U s = 8,2 IV i Ix= 0,501A. Po uwzględnieniu prądu płynącego przez woltomierz otrzymano prąd płynący przez opornik lx = 0,500A. Należy ocenić niepewność wyniku dla poziomu ufności p = 0,95.
Rozwiązanie
Przyjęto jednostajny rozkład błędów przyrządów pomiarowych. Niepewność typu B pomiaru napięcia i natężenia prądu
Agv 0,01-0,5-10
AgA 0,01-0,5-1,0
Niepewność łączną wyraża się wzorem
u =__.(o)028)2+- -0,00282 =
TB V> ;
0-500 0,5002
= V3,l 36 -10"3+ 8,455 -10'3 = 0,1 07Q
Dla obliczenia niepewności rozszerzonej przyjmuję dla p - 0,95 przyjęto współczynnik kp=2.
Niepewność rozszerzona
Up=kp-uTB=2- °.107 = 0,214Q = 0,3Q . Wartość mierzonej rezystancji
U 871
r = ±l = _^£1 = 16 42 " I 0,500
Wynik pomiaru
Rx =16,4Q±0,3Q.
101
Przykład 5.6
Moc czynna prądu trójfazowego zmierzono w układzie dwóch watomierzy kl. 0,5; o U„ =100V i /„ =5A, P„ =500W. Po uwzględnieniu poprawek na moc pobraną przez obwody pomiarowe przyrządów, otrzymano następujące wartości: Pwt =320W i PW2 =410W. Ocenić niepewność pomiaru na poziomie ufności p = 0,95
Rozwiązanie
Składowe niepewności typu B przy jednostajnym rozkładzie błędów.
A = 0,01.05-500
P = pm + PW2 = 320 + 410 = 730W Niepewność łączna
4 = 2,03 W
dP2
Błędy graniczne watomierzy są sobie równe, zatem rozkład wypadkowy będzie rozkładem trójkątnym. Dla rozkładu trójkątnego współczynnik rozszerzenia przyjmuje wartość
*,=V6 -p = 76-0,95 = 2,327
U=kp-Urp= 2,327 • 2,03 = 4,7238 1 » 5 W
Niepewność rozszerzona Wynik pomiaru
= P±[/=730W±5W
102
5.4.3. Ocena niepewności typu A i B
W pomiarach pośrednich dla każdej pośredniej wielkości mierzonej X . wyznacza się, według zasad podanych w rozdziałach 5.4.1 i 5.4.2, niepewności typu A i B. Jeżeli niepewności te mają wartości porównywalne, to oblicza się niepewność standardowa łączną dla wielkości X j.
Niepewność standardową dla średniej Y oblicza się ze wzoru
,y ,-,, (5-3D
dXj
Podobnie, jak w przypadkach poprzednich, jeżeli funkcja f\Xj) jest nieliniowa, uwzględnia się dodatkowe wyrazy szeregu Taylora, a gdy występują zależności miedzy wartościami Xj} oblicza się kowariancję. W pomiarach o największej dokładności zagadnienia dotyczące wyznaczania korelacji są bardzo złożone. Trzeba uwzględnić wszystkie wielkości wpływające oraz wszystkie poprawki podane w świadectwach kalibracji przyrządów pomiarowych. Zagadnienia te są dokładniej omówione w publikacji [3].
W pomiarach pośrednich podstawowym problemem jest ocena współczynnika kp. Przy znacznej liczbie wielkości pośrednich o różnych rozkładach prawdopodobieństwa wyznaczenie splotu tych rozkładów jest bardzo złożone, a niekiedy niecelowe.
Jeżeli będą spełnione warunki centralnego twierdzenia granicznego, to można współczynnikowi rozszerzenia przypisać wartość zmiennej standaryzowanej Z
0 rozkładzie normalnym. Przy próbach mało licznych, o małej liczbie pomia
rów, a z takimi przypadkami spotykamy się często w praktyce, lepszą oceną
współczynnika k będzie przypisanie mu wartości zmiennej standaryzowanej
rozkładu f-Studenta dla zadanego poziomu ufności i dla efektywnej liczby stopni swobody me.
W skrajnych przypadkach dla oceny współczynnika rozszerzenia można stosować metodę przybliżoną przyjmując kp = 2 dla poziomu ufności p = 0,95
1 kp - 3 dla poziomu ufności p = 0,99.
103
Przykład 5.7
Aby wyznaczyć natężenie prądu płynącego w badanym obwodzie zmierzono spadek napięcia na rezystorze wzorcowym /?„ = 10Q i klasie dokładności 0,02. Pomiar napięcia przeprowadzono pięciokrotnie za pomocą woltomierza cyfrowego na zakresie 10V i błędzie określonym przez producenta jako At/ =0,02%t/^ +0,01%£/„. W wyniku pomiaru otrzymano następujące wartości Ui = (8,545; 8,536; 8,542; 8,538; 8,544)V. Należy wyznaczyć przedział niepewności wyników pomiaru dla poziomu ufności p = 0,99.
Rozwiązanie
Ponieważ rezystancja wejściowa woltomierza jest większa od l O9 Q, to można pominąć prąd płynący przez jego obwód. Rozrzut otrzymanych wyników nie wskazuje na występowanie błędów nadmiernych. Wartość średnia napięcia
U = - Y U, = -42,705 = 8,54IV n£ ' 5
Zestawienie wyników obliczeń
n |
ut |
(£/,. -U) |
((/,.- U J2- KT6 |
|
V |
V |
V2 |
1 2 3 4 5 |
8,545 8,536 8,542 8,538 8,544 |
0,004 - 0,005 0,001 -0,003 0,003 |
16 25 1 9 9 |
"L |
42,705 |
0 |
60 |
Niepewność standardowa typu A
5(5-1)
= 1,7-10-3V
Niepewność standardowa typu B, przy założeniu jednostajnego rozkładu błędów
104
_ _ 0.01 • 0.02 • U + 0,01 • 0,01 • Un
Bu
-3-3
"= =
'-7'10 ;'•"'.u.ht«v
Ponieważ niepewności uAu i uBu są tego samego rzędu, to niepewność łączna standardowa pomiaru napięcia
«» = V"L + «L = V(1>7' W3 J +11-6 • 10"3 / =2,3-l(T3V
Standardowa niepewność dla rezystora, przy jednostajnym rozkładzie błędów
0,01-0,02-10
WB/f = ;= = 1,2-10
Wartość prądu
R„ 10,0 Niepewność łączna dla natężenia prądu
łBK
= V5,29 • 10'8 + 1,05 • 10~8 = 2,5 • 10'4 A
Dla poziomu ufności 0,99, z tablic rozkładu normalnego, współczynnik k„= 2,576.
Niepewność rozszerzona
U=kp-u« =2,576-2,5-10"4A = 6,44-10"4=7-10"4A
Ostateczny wynik pomiaru
I = I±U= 0,854 1A ± 0,0007A
105
W rozpatrywanym przykładzie wykonano tylko niewielką liczbę pomiarów. Współczynnik rozszerzenia zostanie wyznaczony z rozkładu f-Studenta.
Efektywną liczbę stopni swobody, przy występowaniu niepewności typu A i B oblicza się ze wzoru
y Y..4 ,v
m. =•
= 5,82
5(10) s ' i( io! J
m =5
.(1.2.10-')1
l '
Z tablic rozkładu Studenta dla p = 0,99 i liczby stopni swobody me = 5 ,
^=4,03.
Niepewność rozszerzona
(/ = tmp • ua- = 4,03 • 2,5 • 10"4 « 10 • KT4 A
Ostateczny wynik pomiaru
I = I±U= 0,854 1A ± 0.0010A
Uzyskana wartość przedziahi ufności jest w tym przypadku większa niż przy przyjęciu rozkładu normalnego.
5.5. SPOSOBY ZAPISU WYNIKU POMIARU
Wyniki pomiarów wielkości ciągłych są liczbami przybliżonymi. Sposób prezentacji tych wyników powinien umożliwiać ocenę dokładności ich otrzymania.
106
Dokładność liczby przybliżonej określa liczba jej cyfr znaczących. Cyfrą znaczącą jest każda cyfra, z wyjątkiem zer na początku liczby dziesiętnej. I tak np.:
liczba 328,01 ma 5 cyfr znaczących,
liczba 0,023 ma 2 cyfry znaczące,
a liczba 2,30 ma 3 cyfry znaczące.
Zera na końcu liczby są cyframi znaczącymi, należy o tym pamiętać przy zapisie np. liczby 5000. Liczbę tę odczytujemy jako liczbę z czterema cyframi znaczącymi. Jeżeli chcemy zaznaczyć, że liczba ta ma mniejszą liczbę cyfr znaczących stosujemy zapis z mnożnikiem 10", np.
liczba o zapisie 50 • l O2 ma 2 cyfry znaczące,
a liczba o zapisie 5-103 ma l cyfrę znaczącą.
Liczbę przybliżoną zaokrągla się tak, aby zawierała tyle cyfr znaczących, że tylko cyfra na ostatnim, najmniej znaczącym miejscu jest cyfrą niepewną, a błąd może wynosić nie więcej niż 5 jednostek następnego nieujawnionego miejsca. Zatem, jeśli wartość rezystancji zapisano w postaci 628,l'Q, to według tej reguły należy wnioskować, że błąd nie przekracza wartości 0,05'Q.
Reguły te należy stosować przy zapisie wyników danych pomiarowych. Należy przy tym pamiętać, że liczbę cyfr znaczących wyniku determinuje najmniejsza jednostka pomiarowa, wynikająca najczęściej z rozdzielczości stosowanego przyrządu. Nie można np. poprawki miernika zapisać jako k= 0,035 dz, gdy dokładność odczytu wynosi 0,1 dz. Ta dokładność odczytu, stanowi w tym przypadku najmniejszą jednostkę pomiarową.
Działania na liczbach przybliżonych, na przykład w pomiarach pośrednich, powinny być wykonywane z taką liczbą cyfr znaczących, aby nie zwiększały w sposób istotny błędu wyniku obliczeń. Należy przy tym pamiętać, że nie wolno zwiększać liczby cyfr znaczących przez zmianę jednostek miar czy mnożenie przez liczbę n. Przyjmuje się, że przy mnożeniu, dzieleniu, potęgowaniu itp. obowiązuje zasada zachowania stałej względnej dokładności. Oznacza to, że stosunek cyfry na najmniej znaczącym miejscu do liczby przybliżonej powinien być na takim samym poziomie w wyniku obliczeń jaki jest w liczbie mniej dokładnej. Np.:
3,14-2,1=6,594 = 6,6
0,1:2,1=0,04 oraz 0,5:6,594 = 0,07.
Przy dodawaniu i odejmowaniu, ostatnią cyfrę w wyniku obliczeń zostawia się na tym miejscu po przecinku ile ma liczba mniej dokładna. Np.:
3,14+2,1=5,24=5,2
107
Przypadek oceny dokładności na podstawie liczby cyfr znaczących dotyczy zwykle surowych wyników pomiarowych, z reguły końcowy wynik pomiaru przedstawia się za pomocą dwóch liczb przybliżonych. Jedna z tych liczb jest oceną wartości otrzymaną w wyniku pomiaru, a druga jest oceną granic błędu. Zwykle liczby te przed uporządkowaniem zawierają więcej cyfr, niż jest to uzasadnione osiągniętą dokładnością pomiaru. Dlatego w końcowym zapisie wyniku należy odrzucić te zbędne cyfry. W pierwszej kolejności zaokrągla się liczbę wyrażającą granice błędu. Liczbę tę zaokrągla się zawsze „w górę" do jednej cyfry znaczącej. Tylko w szczególnie uzasadnionych przypadkach stosuje się zaokrąglanie do dwóch cyfr znaczących. Jednym z nich jest zasada polecana przez Międzynarodową Unię Fizyki Czystej i Stosowanej, według której liczbę wyrażającą granice błędu należy zaokrąglać do dwóch cyfr znaczących wtedy, gdy błąd zaokrąglenia przekracza 20%.
Np. obliczone wartości błędu wynoszą:
A!=l,06, A2=0,821, A3=241, A4=0,0105. Po zaokrągleniu według podanych wyżej reguł, liczby te należy zapisać: A,=l,l, A2=0,9, A3=3-102, A4=0,011.
W drugiej kolejności zaokrągla się liczbę wyrażającą wartość mierzonej wielkości, zostawiając ostatnią cyfrę znaczącą na tym miejscu, na którym występuje ostatnia cyfra znacząca w oszacowaniu błędu. Liczbę tę zaokrągla się „w górę" lub „w dół" w zależności od wartości cyfry odrzucanej:
-jeżeli pierwsza z odrzucanych cyfr jest większa od 5, to ostatnią cyfrę w wyniku pomiaru należy zwiększyć o l,(zaokrąglanie - „w górę")
-jeżeli pierwsza z odrzucanych cyfr jest mniejsza od 5, to ostatnią cyfrę w wyniku pozostawia się bez zmian (zaokrąglanie - „w dół"),
- jeżeli zbędna cyfra jest równa 5, a po niej występuje cyfra różna od zera, to zaokrągla się „w górę",
- jeżeli zbędna cyfra jest równa 5, a po niej następuje zero, to zaokrągla się „do parzystej", co oznacza, że ostatnia cyfra po zaokrągleniu musi być cyfrą parzystą.
Poniżej przedstawiono przykładowe zapisy wyniku pomiaru przed zaokrągleniem i po uporządkowaniu zapisu według podanych reguł.
1531,15±0,351=1531,2±0,4
36587125,3±590=(365871,253±6)-102=(365871±6)-102
0,00453512±46-10-6=(454±5)-10'5
525,415±0,113=525,42±0,12
6
METODY REGRESJI
6.1. WPROWADZENIE
Często celem doświadczeń polegających na pomiarze wielu różnych wartości kilku różnych wielkości jest zbadanie prawdziwości założonej matematycznej formuły opisującej związek zachodzący pomiędzy jedną z tych wielkości i pozostałymi mierzonymi wielkościami. Najprostszym, a zarazem najczęstszym przypadkiem, jest badanie relacji między dwiema wielkościami, przy tym zakłada się, że ta relacja jest prostoliniowa.
Jeśli zakłada się, że dwie wielkości są związane relacją liniową, to szukana jest linia prosta, która jest najlepiej „dopasowana" do wyników pomiarów. Problem ten można rozwiązać metodą graficzną lub analityczną. Ta analityczna metoda znajdowania linii prostej, która najlepiej uwzględnia wyniki otrzymane z pomiarów nazywa się metodą regresji liniowej lub metodą najmniejszych kwadratów.
Rozszerzeniem problemu jest ocena „dopasowania" znalezionej funkcji, w szczególnym przypadku liniowej do danych pomiarowych. Liczbowych danych do tej oceny dostarcza analiza współczynnika korelacji.
6.2. METODA GRAFICZNA
Metoda graficzna jest stosowana do wyznaczania przebiegu charakterystyk prostoliniowych czyli opisanych zależnością (6. l)
y = A + Bx (6.1)
Rozwiązaniem problemu jest wyznaczenie wartości stałych A i B. W tym celu wyniki pomiarów przedstawia się w postaci punktów w układzie współrzędnych prostokątnych x,y, a następnie wykreśla się taką prostą, aby przechodziła przez największą liczbę zaznaczonych punktów lub blisko nich. Współczynniki A i B charakterystyki (6.1) wyznacza się ze współrzędnych dwóch punktów leżą-
109
cych na wykreślonej prostej. Na rysunku 6.1 pokazano tę metodę dla 6-ciu punktów pomiarowych.
.XS
X
-*-
Rys.6. l. Metoda graficzna.
Metodę tę można również zastosować do wyznaczania charakterystyk niektórych funkcji nieliniowych. Jest to możliwe przez zastosowanie takiego skalowania współrzędnych aby wykreślona w takim układzie charakterystyka była linią prostą. Na przykład dla charakterystyk potęgowych opisanych zależnością (6.2)
y = A-xB (6.2)
stosuje się linearyzację przez logarytmowanie obu stron zależności (6.2) czyli
log y = B log x + log A (6.3)
Gdy w wykresie zastosujemy skalę podwójnie logarytmiczną ( czyli na obu osiach współrzędnych), to otrzymany wykres zależności (6.2) powinien być linią prostą.
Dla charakterystyk wykładniczych, jak we wzorze (6.4)
y = A-Bx (6.4)
stosuje się linearyzację przez zastosowanie skali półlogarytmicznej, tzn. dla rzędnej y - skala logarytmiczna, a dla odciętej x - skala liniowa, jak to wynika z zależności (6.5) otrzymanej w wyniku logarytmowania zależności (6.4).
log y = xlog B + log A
(6.5)
110
Metoda graficzna jest metodą mało dokładną. Zaletą j ej łatwość uzyskania informacji pomagających zrozumieniu badanych zjawisk.
6.3. METODA NAJMNIEJSZYCH KWADRATÓW
Metoda najmniejszych kwadratów jest metodą najbardziej ogólną, stosowaną do różnego rodzaju krzywych obrazujących zależności między dwiema wielkościami. Metoda ta opiera się na twierdzeniu, że jeżeli suma kwadratów różnic między rzędnymi punktów wyznaczonych z pomiarów i rzędnymi odpowiadających im punktów leżących na hipotetycznej krzywej osiąga minimum, (zobacz zależność (6.6)), to taka krzywa jest najlepiej „dopasowana" do otrzymanych wyników pomiarowych.
£(>>,.-y,,)2=min (6.6)
1=1 gdzie
yi - wartości uzyskane z pomiarów, yhi - rzędne punktów leżących na hipotetycznej krzywej. Jest to równoznaczne ze sformułowaniem problemu: znaleźć krzywą, dla której prawdopodobieństwo, że wartości pomierzone znajdą się na krzywej jest największe.
6.3.1. Regresja liniowa
Dla liniowej zależności między wielkościami x i y opisanej wzorem (6.1) należy obliczyć wartości stałych A i B spełniających warunek najmniejszych kwadratów. Zakłada się przy tym, że w wyniku pomiarów uzyskano N - punktów pomiarowych: (*/, yi),...,(xn„ yn) oraz, że niepewności w pomiarach wielkości x, są znacznie mniejsze niż niepewności w pomiarach wielkości y{. Dla poszczególnych punktów pomiaru oblicza się różnice - Ay„ uzyskując zależności (6.7).
= y 2 - yh2 = y i - (A + Bx2 )= y 2 ~ A ~ Bx2 » (6-7)
gdzie oznaczenia jak we wzorze (6.6).
111
Suma kwadratów różnic opisanych wzorem (6.7) wyraża się zależnością
= (Ay, )2 + (Ay2 )2 + ... 4- (Ay„ )2 = f (A, b) (6.8)
w
Poszukiwanie wartości stałych A i B, dla których funkcja w = f (A, b] osiąga minimum jest równoważne z rozwiązaniem układu równań (6.9)
= 0 i = 0 (6.9)
dA dB
Po podstawieniu do (6.9) zależności (6.7) i (6.8) otrzymuje się układ równań (6.10). Równania ta nazywają się równaniami normalnymi.
(6.10)
N N
Z rozwiązań układu równań (6.10) otrzymuje się najlepsze przybliżenie stałych A i B otrzymane metodą najmniejszych kwadratów. Rozwiązania te są postaci:
N Y N \ f N Y N
2
(6.11)
I
ł JY -s«
h ^2
M S'? -1.*,
/=!
(6.12)
Linia prosta o stałych obliczonych według zależności (6.11) i (6.12) nazywa się prostą regresji zmiennych y i x.
112
Zakładając, że znana jest niepewność pomiarów y\iK<yN i stosując prawo
przenoszenia niepewności do wyrażeń (6.11) i (6.12) opisujących stałe A i B można oszacować niepewności tych stałych. Ich wariancje będą odpowiednio równe:
(6.13)
u2B = N-u2y/M
gdzie:
ua - jest niepewnością stałej A,
mb -jest niepewnością stałej B,
uy - niepewność pomiarów y, ,K , yN ,
M - jest wyrażeniem opisanym zależnością (6. 14).
Współczynnik korelacji liniowej
Słuszność hipotezy liniowej zależności między wielkościami x, y może być oceniana wieloma metodami. Jedna z nich polega na sprawdzeniu, czy punkty pomiarowe leżą dostatecznie blisko linii prostej o obliczonych stałych A i B poprzez wyznaczenie ich niepewności według wzorów (6.13). W metodzie tej konieczna jest znajomość niepewności pomiarów xt i yt. W przypadku trudności z oszacowaniem niepewności danych xh yt ,stopień, w jakim punkty (je,, y, ),K , (jc^, yN )potwierdzają hipotezę liniowości , wyraża współczynnik korelacji liniowej - r. Współczynnik ten oblicza się według wzoru (6.15).
1=1
113
Wartość liczbowa współczynnika korelacji liniowej - r może mieć wartości od -l do +1. Jeżeli r jest bliskie ±1, to punkty są rozłożone wzdłuż pewnej prostej; jeżeli r jest bliskie O, to punkty są nieskorelowane i nie wyznaczają prostej. W przypadkach przybierania przez r wartości pośrednich należy skorzystać z oceny prawdopodobieństwa uzyskania na podstawie N pomiarów nieskorelowa-nych zmiennych x i y współczynnika r większego od określonej wartości r0. Co można zapisać:
(6.16)
Prawdopodobieństwo to (wyrażone w %), dla różnej liczby pomiarów - N i różnych wartości r0 podano w tabeli 6. l .
Aby skorzystać z tabeli 6.1 należy najpierw na podstawie punktów pomiarowych obliczyć współczynnik korelacji - r0. Następnie z tabeli należy odczytać prawdopodobieństwo, że N nieskorelowanych par da współczynnik korelacji nie mniejszy niż obliczony - r0. Jeżeli prawdopodobieństwo to jest wystarczająco małe, to można wnioskować, że jest mało prawdopodobne, aby zmienne x i y były ze sobą nieskorelowane, a więc jest bardzo prawdopodobne, że są one skorelowane.
Tabela 6.1
r. |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |0,9 |1,0 |
||
N |
pn% |
||||||||||
3 |
100 |
94 |
87 |
81 |
74 |
67 |
59 |
51 |
41 |
29 |
0 |
6 |
100 |
85 |
70 |
56 |
43 |
31 |
21 |
12 |
6 |
1 |
0 |
10 |
100 |
78 |
58 |
40 |
25 |
14 |
7 |
2 |
0,5 |
- |
0 |
20 |
100 |
67 |
40 |
20 |
8 |
2 |
0,5 |
0,1 |
- |
- |
0 |
50 |
100 |
49 |
16 |
3 |
0,4 |
- |
- |
- |
- |
- |
0 |
6.3.2. Regresja wielomianowa
Regresja liniowa jest szczególnym przypadkiem szerokiej klasy zagadnień znajdowania krzywych obrazujących relację między dwiema zmiennymi x i y. Często zakłada się, że zmienna y daje się wyrazić za pomocą wielomianu zmiennej x:
"+A+£x" (6.17)
Stosując do wielomianu (6.17) metodę najmniejszych kwadratów uzyskuje się układ równań normalnych o postaci
114
N N N N
1=1 (=1 1=1 1=1
N N _N N
n ,
i=l i=l 1=1 1=1
Rozwiązanie tego układu («+/) równań to wyrażenia opisujące najlepsze przybliżenia współczynników A,B,...,K, krzywej opisanej wzorem (6.17), zwanej krzywą regresji wielomianowej.
Należy zauważyć, że im wyższy stopień wielomianu, tym rozwiązywanie układu równań normalnych jest bardziej czasochłonne. Istnieją programy komputerowe, które pozwalają zminimalizować tę trudność.
6.3.3. Regresja wielokrotna
Regresja wielokrotna dotyczy zagadnień wzajemnych zależności między więcej niż dwiema zmiennymi. Najprostszy przypadek regresji wielokrotnej dotyczy trzech zmiennych x, y, z, z których jedna - z zależy liniowo od dwóch pozostałych, co można opisać zależnością:
z = A + Bx + Cy (6.19)
Przypadek ten można rozwiązać przez uogólnienie metody najmniejszych kwadratów stosowanej przy dwóch zmiennych. Założenia są następujące:
wykonano serię pomiarów wielkości x, y, z, uzyskując wyniki xit y i, zh
i=l,...,Nwyniki z/ - mają jednakowe niepewności,
niepewności wyników xh i yt są pomijalnie małe.
Zastosowanie zasady największego prawdopodobieństwa czyli metody najmniejszych kwadratów prowadzi do układu równań normalnych opisanych zależnościami (6.20)
115
N N
S*, + *|>,2 + CJ^y,. = j^x,y,, (6.20)
/=! i=l 1=1 ;=1
N N N N
Równania te należy rozwiązać względem A, B i C, aby otrzymać najlepsze dopasowanie funkcji (6.19) do otrzymanych wyników pomiaru.
116
LITERATURA
[I] Chwaleba A., Pomiński M., Siedlecki A.: Metrologia elektryczna. WNT,
Warszawa 1996.
[2] Dudziewicz J., praca zbiorowa: Etalony i precyzyjne pomiary wielkości
elektrycznych. PWN, Warszawa 1982. [3] Guide to the Expression of Uncertainty in Measurement. ISO 1993, 1995.
Tłum. poi.: Wyrażanie niepewności pomiaru. Przewodnik. GUM 1999. [4] Jaworski J.M.: Niedokładność pomiaru w procesie nauczania metrologii.
XXXII Międzyuczelniana Konferencja Metrologów, Rzeszów 2000. [5] Jaworski J.M.: Problem niedokładności w wykładzie. Metrologia
elektryczna. XXXII Międzyuczelniana Konferencja Metrologów,
Rzeszów 2000. [6] Jaworski J.M., Morawski R. Z., Olędzki J. S.: Wstęp do metrologii i
techniki eksperymentu. WNT, Warszawa 19992. [7] Jaworski J.: Błąd i niepewność pomiaru bezpośredniego. Pomiary,
Automatyka, Robotyka 9/1999 [8] Jaworski J.: Błąd i niepewność pomiarów pośrednich. Pomiary,
Automatyka, Robotyka 10/1999 [9] Jaworski J.: Błąd i niepewność przyrządów pomiarowych. Pomiary,
Automatyka, Robotyka 11/1999 [10] Jaworski J.: Niedokładność, błąd, niepewność. XXIX MKM, Nałęczów
Tl 1997
[II] Kalus-Jęcek B., No wieki R.: Podstawy miernictwa elektrycznego dla
elektroników. Skrypt Politechniki Łódzkiej, Łódź 1995.
[12] Kuśmierek Z.: Podstawy metrologii elektrycznej. Wzorce i teoria
pomiarów. Skrypt Politechniki Łódzkiej, Łódź 1990. [13] Kuśmierek Z., praca zbiorowa: Metrologia elektryczna i elektroniczna.
Ćwiczenia laboratoryjne. Skrypt Politechniki Łódzkiej, Łódź 2000. [14] Lisowski M.: Prawo o miarach w świetle przepisów i norm. Normalizacja
1/1996,8.15-18. [15] Sochocka D., Stanioch W.: Odtwarzanie i przekazywanie jednostki
napięcia elektrycznego w Głównym Urzędzie Miar. XXXII
Międzyuczelniana Konferencja Metrologów, Rzeszów 2000. [16] Taylor J. R.: Wstęp do analizy błędu pomiarowego. PWN, Warszawa
1995. [17] Turzeniecka D.: Ocena niepewności wyniku pomiaru. Wyd. Politechniki
Poznańskiej, Poznań 1997.
117
NORMY
[18] PN-90/E-06508. Oporniki dekadowe. Ogólne wymagania i badania. [19] PN-90/E-06509. Oporniki wzorcowe. Ogólne wymagania i badania. [20] PN-80/E-06531. Ogniwa wzorcowe. Wymagania ogólne. [21] PN-88/E-01100. Oznaczenia wielkości i jednostek miar używanych w elektryce. Postanowienia ogólne. Wiadomości podstawowe..
Wyszukiwarka
Podobne podstrony:
Wzorce wielkości elektrycznych i ocena niepewności pomiaru Zygmunt Kusmierek
03 Metrologia Wielkości Geometrycznych Błędy, niepewność pomiarowaid 4415 pptx
PW 03 Metrologia Wielkości Geometrycznych Błędy, niepewność pomiarowa PW
Cyfrowy pomiar podstawowych wielkości elektrycznych
Pomiary wielkosci elektrycznych Badanie bramek logicznych id 37
Sprawozdania przerobione, Pomiary podstawowych wielkości elektrycznych, ZESPÓŁ SZKÓŁ Im
Sprawozdania przerobione, Pomiary podstawowych wielkości elektrycznych, ZESPÓŁ SZKÓŁ Im
cw 4 Pomiary wielkości elektrycznych za pomocą oscyloskopu
Pomiary wielkosci elektrycznych Minimalizacja funkcji tablica
1 dmm, dmm p, Pomiary wielkości elektrycznych multimetrami
ZASTOSOWANIE MULTIMETRÓW CYFROWYCH DO POMIARU PODSTAWOWYCH WIELKOŚCI ELEKTRYCZNYCH
Oscyloskopowe pomiary wielkości elektrycznych
cw 2 Pomiary w układach wielkości elektrycznych z użyciem oscyloskopu
rodzaje i wlasciwosci przetwornikow do pomiaru temperatury, Politechnika Łódzka Elektrotechnika, mag
Pomiary wielkosci elektrycznych Pomiar napiec oscyloskopem id 3
24 cyfrowy pomiar podstawowych wielkosci elektrycznych
sprawko- wprowadzenie do pomiaru wielkości elektrycznych
więcej podobnych podstron