OBLICZENIE OSIADANIA STATKU
W czasie eksploatacji statku na wodach płytkich i w kanałach należy zwrócić uwagę na zjawisko osiadania statku. Ma to szczególnie duże znaczenie dla statków pełnotliwych (zbiornikowce , masowce o współczynniku pełnotliwości większym lub równym 0,8).
Jeżeli statek porusza się na wodzie płytkiej następuje przewężenie przekroju wody pod dnem statku. Wiąże się to z powstaniem przepływu wstecznego a to powoduje powstawanie różnicy ciśnień w opływie statku i obniżenie się lustra wody wzdłuż burt statku. Przepływ wsteczny zmniejsza prześwit wody pod dnem statku i statek głębiej się zanurza. Działanie sił hydrodynamicznych i momentu przegłębiającego w czasie ruchu statku na wodzie płytkiej powoduje przegłębienie i zmianę zanurzenia.
Jeżeli statek o dużym zanurzeniu w stosunku do głębokości akwenu będzie utrzymywał taką samą prędkość na wodzie płytkiej z jaką płynął na wodzie głębokiej to może to być dla niego niebezpieczne i może prowadzić na skutek osiadania do uderzeń dnem statku o dno akwenu .Taki przypadek może się zdarzyć na pogłębionym torze wodnym , kiedy statek zejdzie z kursu .
W celu oceny osiadania statku można skorzystać z kilku dostępnych metod obliczeń. Jednakże jest to ocena wstępna , gdyż każdorazowo osiadanie statku zależy od wielu czynników, które nie są uwzględniane w obliczeniach ( np. kształt kadłuba, współczynnik pełnotliwości , ).
12.1.Obliczenia osiadania statku dla akwenu płytkowodnego H / T = 1,2
dla prędkości max i manewrowej :
Dla moich obliczeń przyjąłem następujące dane:
- głębokość akwenu H= 14,4 m
- zanurzenie statku T = 12 m , więc H/T = 1,2
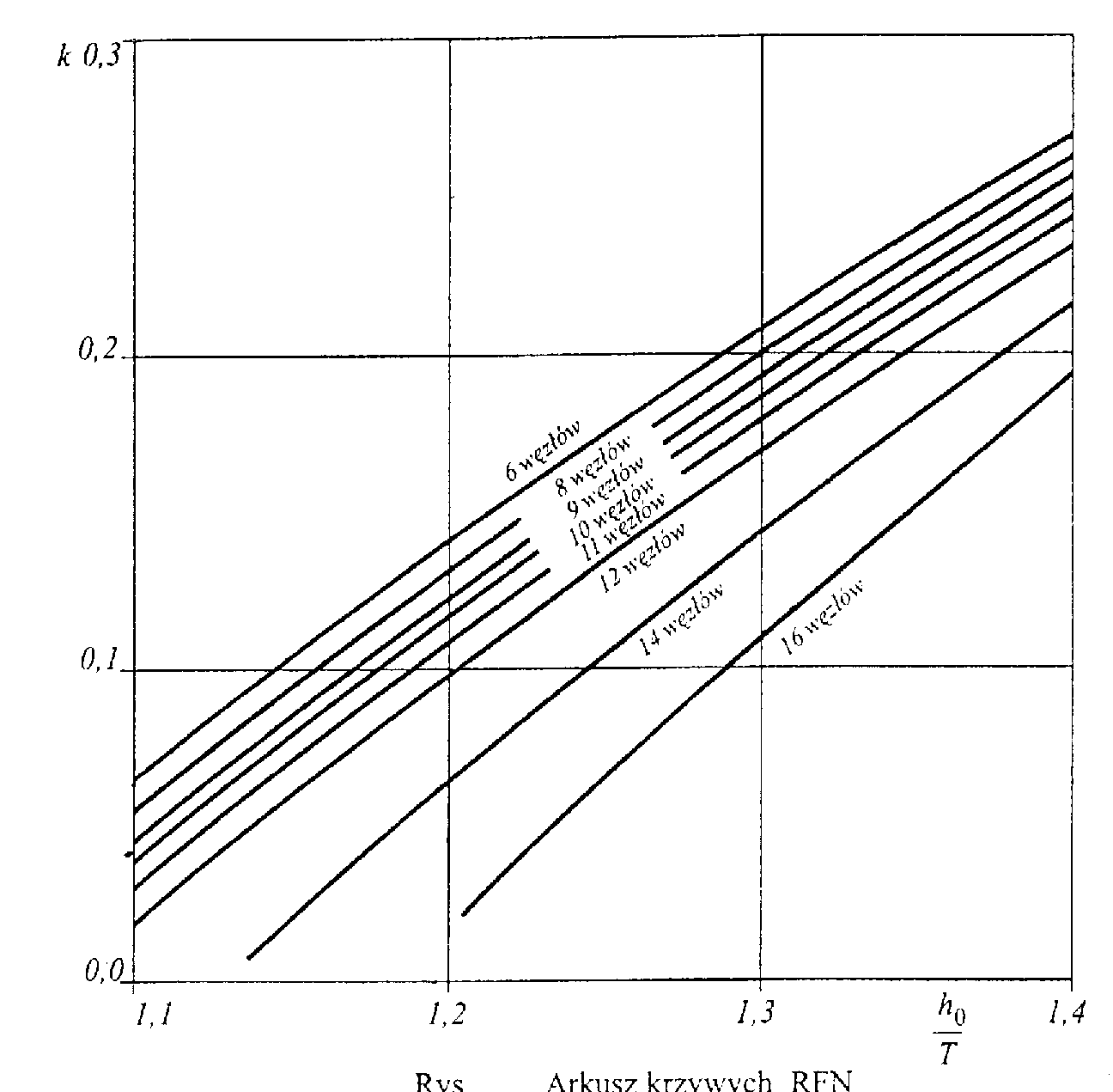
Do obliczeń płytkowodzia przyjąłem metodę RFN ,do której zostały wykorzystane arkusze krzywych , do których wchodzi się następującymi argumentami : stosunkiem głębokości do zanurzenia oraz prędkością statku wyrażoną w węzłach.
- Vmax = 15,0 w
Vman.= 14,0 w
- określam argumenty wejściowe do arkusza krzywych (metody RFN ):
H/T =1,2 i
- Vmax = 15,0 w to k = 0,04
Vman.= 14,0 w to k = 0,063
- więc osiadanie statku według zależności :
Z = H ( 1-k ) - T
wyniesie
Z = 14,4 ( 1 - 0,04 ) - 12 = 1,82 m dla Vmax
Z = 14,4 ( 1 - 0,063 ) - 12 = 1,49 m dla Vman.
Poniżej zamieszczam wykres z którego korzystałem
Dla sprawdzenia obliczam jeszcze raz korzystając z metody ROMISHA :
Z = 1,1 * Cv * Cδ * ( H/T - 0,4 ) ־ ² ( H - T ) k
k = 0,1 [ T/H ( H - T ) + 1 ] VOR = ( g * H )1/2 (H*LBP/80BT) n
Cδ = 90 ( ( CB*B) / LBP ) ) ² n = 0,125 dla masowca na płytkowodziu
Cv = 8*( V/ VOR ) ² [ (( V/ VOR ) - 0,5 ) 4 + 0,0625 ]
Z-osiadanie , T - zanurzenie , H - głębokość akwenu , k - współczynnik ,
B - szerokość statku , LBP - długość miedzy pionami , V - prędkość statku ,
CB - wsp. pełnotliwości kadłuba , VOR - pręd. osiągalna na płytkowodziu
Dane : H = 14,4 m , T = 12 m , LBP = 169,2 m , B = 27,48 m
CB = 0,814 , VMAX = 15 w = 7,72 m/s :
k = 0,1 [ (12 / 14,4) ( 14,4 - 12 ) + 1 ] = 0,3
Cδ = 90 (( 0,814*27,48) / 169,2 ) ² =1,573
Cv = 8 ( 7,72 / 8,82 ) ² [ (( 7,72 / 8,82) - 0,5 ) 4 + 0,0625 ] = 0,505
VOR. = (9,81*14,4)1/2 (14,4*169,2 / (80*27,48*12 ))0,125 =8,82 m/s
Z = 1,1*0,505*1,573 (( 1,2 - 0,4 ) ־ ² ( 14,4 - 12 )) 0,3 = 1,77 m
Dla prędkości manewrowej Vman = 14 w = 7,20 m/s :
Wszystkie wartości pozostają takie same za wyjątkiem
Cv = 8 ( 7,2 / 8,82 ) ² [ (( 7,2 / 8,82) - 0,5 ) 4 + 0,0625 ] = 0,387
Z = 1,1*0,387*1,573 (( 1,2 - 0,4 ) ־ ² ( 14,4 - 12 )) 0,3 = 1,36 m
Wykresy żródłowe :
Aleksander Nowicki : ” Wiedza o manewrowaniu statkami morskimi ”,
Własne notatki z ćwiczeń z przedmiotu ” Manewrowanie statkiem ”
12.2. Obliczenia osiadania statku dla kanału H / T = 1,2 i średniej szerokości
kanału równej trzem szerokością statku , podczas prędkości manewrowej .
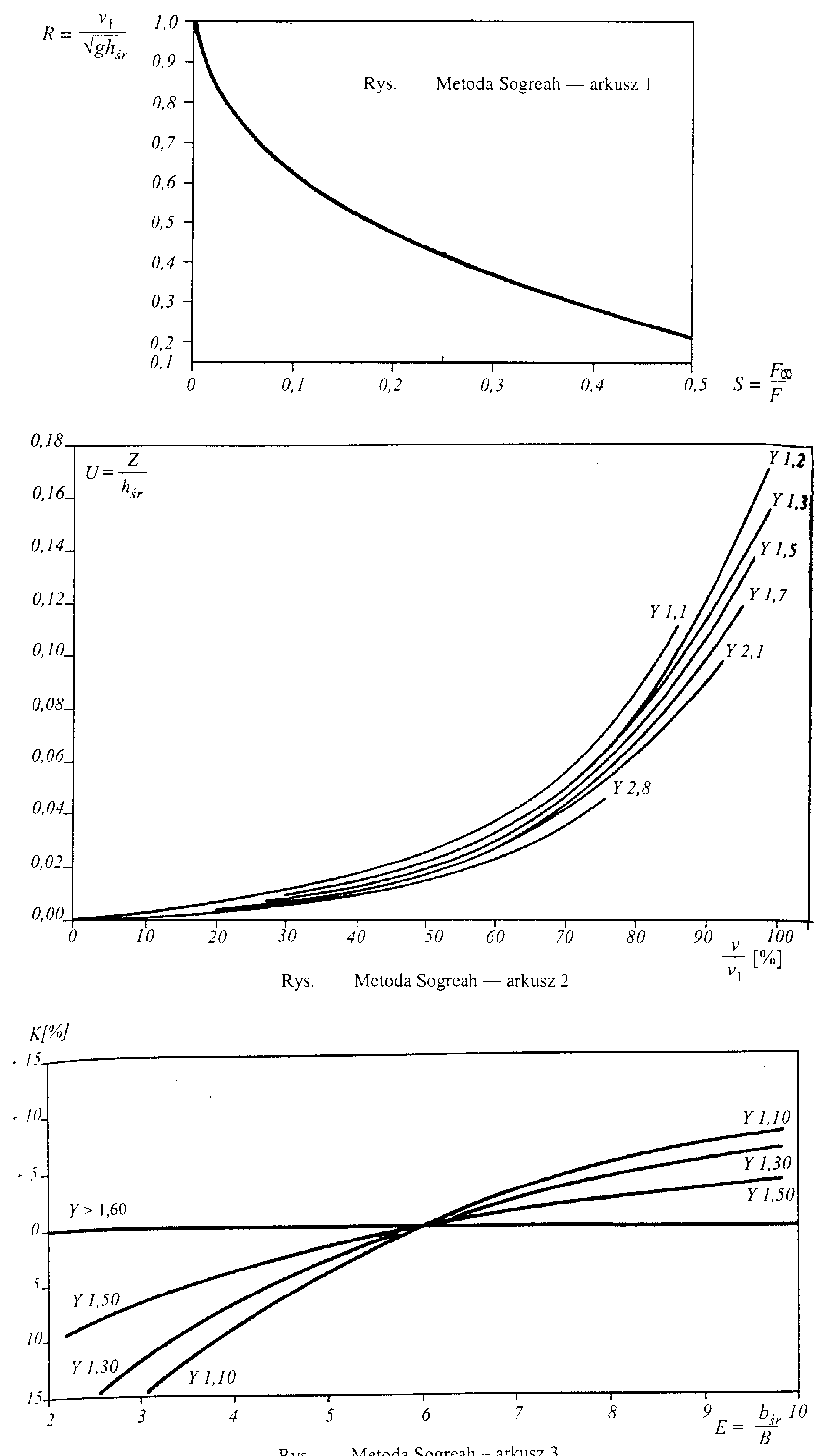
Do obliczeń kanału przyjąłem metodę Sogreah , wymagającą użycia trzech
arkusz krzywych , która powstała w wyniku badań modelowych .
Dane wyjściowe metody Sogreah :
średnia szerokość kanału bśr = F / H
średnia głębokość kanału hśr = F / b1
prędkość krytyczna Vkryt = √ ( g*hśr )
współczynnik prześwitu poziomego E = bśr / B
współczynnik prześwitu pionowego Y = H / T
współczynnik prześwitu całkowitego S = F¤ / F
Dane :
b 1 = 90 m
b 2 = 75 m
H = 14,4 m
T = 12 m
B = 27,48 m
VWN manewrowa = 6 w = 3,09 m/s
Obliczenia :
F¤ = B*T = 27,48 * 12 = 329,76 m²
F = 0,5 * H (b 1 + b 2 ) = 0,5 * 14,4 ( 90 + 75 ) = 1188 m²
bśr = F / H = 1188 / 14,4 = 82,5 m
hśr = F / b1 = 1188 / 90 = 13,2 m
Vkryt. = √ ( g*hśr ) = √ ( 9,81 * 13,2 ) = 11,38 m/s
E = bśr / B = 82,5 / 27,48 = 3,0
Y = H / T = 14,4 / 12 = 1,2
S = F¤ / F = 329,76 / 1188 = 0,278
Dla s = 0,278 z wykresu pierwszego odczytuję wielkość pomocniczą R = 0,4
V1 = R * Vkryt. = 0,4 * 11,38 = 4,6 m/s
Obliczam procentowy stosunek prędkości statku do V1:
100V / V1 = ( 100 * 3,09 ) / 4,6 = 67%
Dla 67% i Y = 1,2 z wykresu drugiego odczytuję wartość U = 0,044
Osiadanie wyraża się wzorem :
Z = U * hśr = 0,044 * 13,2 = 0,58 m
Z tego powodu że wykres drugi został opracowany wyłącznie dla współczynnika prześwitu poziomego E = 6 , a mój wynosi E = 3,0
muszę wnieść poprawkę określoną za pomocą wykresu trzeciego :
Dla E = 3,0 i Y = 1,2 odczytuję wartość K% = - 13,5
Obliczam poprawkę na osiadanie ze wzoru :
∆Z = ( K% * Z ) / 100 = ( - 13,5 * 0,58 ) / 100 = - 0,078 m
Osiadanie rzeczywiste : Zmax = Z - ∆Z = 0,58 - ( - 0,078 ) = 0,658 m
Dokładność tej metody została określona na ± 0,15 m .
Spełnienie kryteriów stosowania metody :
0 %≤ ( V / V1 ) % ≤ 98 % równe 67 %
współczynnik pełnotliwości kadłuba powinien mieścić się w granicach od 0,80 do 0,82
CB = 0,814
szerokość dna akwenu powinna mieścić się w granicach 1,5 B ≤ b2 ≤ 10 B
b2 = 2,73 B
szerokość powierzchni wody powinna mieścić się w granicach 2,3 B≤ b1 ≤ 10 B
b1 = 3,27 B
głębokość akwenu powinna być zawarta w przedziale 1,1 T ≤ H ≤ 2,8 T
H = 1,2
Wykresy żródłowe :
Aleksander Nowicki : ” Wiedza o manewrowaniu statkami morskimi ”
13.1.Manewry statku podczas podchodzenia , przyjmowania i zdawania pilota :
Manewr podczas przyjmowania pilota wymaga dużej ostrożności i koordynacji działań z jednostką pilotową. Podczas doprowadzania statku na miejsce przyjęcia pilota, o którym informacja znajduje się w locji i na mapach morskich, należy nawiązać kontakt z jednostką pilotową korzystając z łączności VHF . W rozmowie tej ustalone zostają szczegóły dotyczące
Wyszukiwarka
Podobne podstrony:
Bagińska, mechanika gruntów P, Obliczenie osiadania punktu środkowego wskazanego fundamentux
3 Osiadanie statku w ruchu
Obliczenie osiadań stopy fundamentowej tabela
Osiadanie statku w ruchu
schematy obliczania osiadań
Fundament bezpośredni - przyklad obliczenia I i II SG c. d., tabela osiadań
Obliczenie nośności i osiadań pali na podstwie sondowań statycznych CPT
OBLICZENIE RAMY METODĄ PRZEMIESZCZEŃ OD OSIADANIA PODPÓR projekt42
Obliczenie nośności i osiadań pali na podstwie sondowań statycznych CPT
Prezentacja JMichalska PSP w obliczu zagrozen cywilizacyjn 10 2007
3 ANALITYCZNE METODY OBLICZANIA PŁYWÓW
Obliczanie masy cząsteczkowej
Obliczanie powierzchni
2 Podstawy obliczania
3 2 Ćwiczenie Obliczanie siatki kartograficznej Merkatora
GEOMETRIA OBLICZENIOWA I
więcej podobnych podstron