PODSTAWY MECHANIKI RUCHU POJAZDÓW
1. OKREŚLENIA WSTĘPNE
Teoria ruchu samochodu jest działem mechaniki stosowanej. Objaśnia ona pojęcia i określa prawa charakteryzujące istotę i właściwości przemieszczania pojazdów samochodowych o napędzie własnym i ciągnionych.
Znajomość teorii ruchu samochodu, określanej często jako mechanika ruchu samochodu, umożliwia analizowanie współzależnych czynników rządzących ruchem samochodu i formułowanie zasad oraz wniosków wykorzystywanych w budowie i eksploatacji pojazdów samochodowych. Przydatność teorii ruchu samochodu polega przede wszystkim na udostępnianiu metod badania i charakteryzowania najważniejszych cech pojazdów, jak:
- właściwości ruchowe pojazdu,
- stateczność ruchu pojazdu,
- bezpieczeństwo ruchu pojazdu,
- właściwości ekonomiczne pojazdu.
Właściwości ruchowe pojazdu to jego zachowanie się podczas jazdy w rozmaitych warunkach drogowych i atmosferycznych. Właściwości te ustalone są na podstawie analizy sił występujących podczas ruchu pojazdu. Wyraża się je takimi parametrami jak szybkość ruchu, zdolność pokonywania wzniesień lub uzyskiwania przyspieszeń. Parametry te zależą bezpośrednio od budowy i wyposażenia pojazdu.
Stateczność ruchu pojazdu to zdolność pojazdu do zachowania nadanego mu kierunku ruchu podczas zakręcania i jazdy prostoliniowej. Zawarte są tu m.in. problemy prawidłowego prowadzenia samochodu, zdolność pojazdu do trzymania się drogi oraz sterowności i zwrotności pojazdu. Tego rodzaju własności pojazdu zależą przede wszystkim od jego konstrukcji.
Bezpieczeństwo ruchu pojazdu rozumiane jest jako zasady uczestniczenia w ruchu samochodowym, w różnych warunkach drogowych, ograniczające do minimum zagrożenia bezpieczeństwa jazdy w każdej sytuacji na jezdni. Dotyczy to m.in. ustalania licznych wymagań i przepisów zwiększających bezpieczeństwo ruchu samochodowego.
Właściwości ekonomiczne pojazdu to przede wszystkim zużycie paliwa w określonych warunkach drogowych. Ustalane jest ono na podstawie charakterystyki silnika w powiązaniu z parametrami charakterystycznymi całego pojazdu.
2. CHARAKTERYSTYKI ŻRÓDEŁ NAPĘDU POJAZDU
2.1. Charakterystyki zapotrzebowania i podaży mocy
Ruch samochodu zapewniany jest przez układ napędowy i źródło energii - silnik. Do napędu samochodu stosowane były wszystkie rodzaje silników, jakie znane są w historii techniki: parowe, elektryczne, spalinowe i turbiny gazowe. Z biegiem lat silnik spalinowy wyparł całkowicie inne rodzaje silników i w obecnie produkowanych samochodach silnik ten stosowany jest powszechnie. Jednakże tłokowy silnik spalinowy zastosowany do napędu samochodu wykazuje liczne niedoskonałości, co jest m.in. powodem ciągłych badań i prób nad zastosowaniem do napędu samochodu innych rodzajów silników (np. w przedstawionym w 1992 r. prototypowym Volvo ECC zastosowano turbinę gazową).
Przeprowadzimy porównanie przydatności różnych rodzajów silników do napędu samochodu. Właściwości układów napędowych i silników często wygodnie jest przedstawić przy pomocy charakterystyk, czyli wykresów ilustrujących interesujące nas zależności.
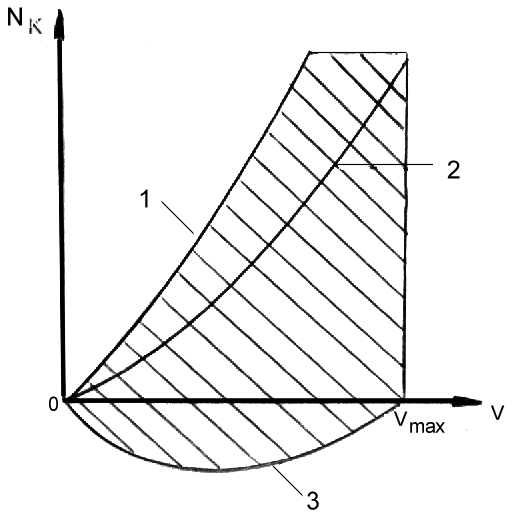
Rys.1. Charakterystyka zapotrzebowania mocy dla pojazdu.
maksymalne wzniesienie (przyspieszenie)
ruch po drodze poziomej
maksymalny spadek
Charakterystyka zapotrzebowania mocy dla pojazdu samochodowego jest pewnym polem. Na osi odciętych odkładana jest prędkość jazdy, wybierana dowolnie aż do vmax . Na osi rzędnych - moc na kołach pojazdu NK, wynikająca z pokonywania oporów ruchu na drodze poziomej przy wyjeżdżaniu na wzniesienie lub zjeżdżaniu z wzniesienia oraz przy przyspieszaniu (względnie hamowaniu).
Jeśli zatem kierowca jadąc samochodem wybiera punkty leżące w polu charakterystyki zapotrzebowania, to układ napędowy powinien spełniać stawianemu w ten sposób wymagania, czyli powinien dysponować tzw. charakterystyką podaży mocy.
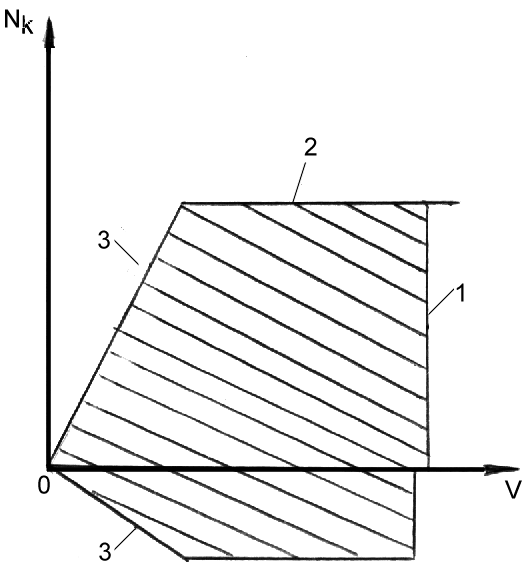
Rys. 2. Charakterystyka podaży mocy
Pole charakterystyki podaży mocy układu napędowego pojazdu jest ograniczone przez:
Maksymalna prędkość pojazdu lub graniczna prędkość obrotowa silnika.
Maksymalna moc napędu dostarczana przy danej prędkości jazdy. Gdy przebieg mocy jest idealny to NK = const.
Granica przyczepności. Przy małych prędkościach jazdy wymaganie stałej mocy spowodowałoby wzrost siły napędowej do nieskończoności. Wtedy siła przyczepności między kołami a jezdnią nie byłaby w stanie przenieść siły napędowej i staje się ograniczeniem pola podaży. Granice dla obszaru napędu i hamowania mogą być różne.
Porównanie różnych układów napędowych przeprowadzimy na podstawie charakterystyk pełnego obciążenia, dających jednakowe prędkości maksymalne.
Rys. 3. Porównanie układów napędowych.
Na wykresie zależności mocy od prędkości jazdy nanosimy granice idealnego pola podaży. Następnie charakterystykę pełnego obciążenia lokomotywy parowej i samochodowego silnika prądu stałego . Jak widać z wykresu charakterystyki te są podobne do idealnej charakterystyki podaży. Zatem nie jest tu potrzebny rozbudowany układ napędowy, najwyżej przekładnia główna. Nanosząc na wykres charakterystykę silnika spalinowego można zauważyć, że nie spełnia ona wymagań napędu samochodu. Konieczne jest zatem stosowanie tu układu napędowego zawierającego elementy dopasowujące charakterystykę silnika spalinowego do wymagań napędu samochodu (np. sprzęgło, skrzynia przekładniowa, powiedzmy 4-biegowa). Wtedy można stwierdzić, że charakterystyki wszystkich tych układów napędowych prawie pokrywają się z polem zapotrzebowania. Ponadto napęd elektryczny pozwala uzyskiwać duże krótkotrwałe przyspieszenia.
Dlaczego jednak stosowany jest silnik spalinowy ?
Porównując masy różnych układów napędowych, rozumiane jako suma mas silnika, ewentualnego układu napędowego i zasobnika energii, stwierdzić można, że jednostkowe masy silników spalinowych i elektrycznych są podobne i osiągają wartości 2÷5 kg/kW. Natomiast znacznie korzystniejsze są masy turbin gazowych 0,5÷3 kg/kW.
Analizując masę jednostkową zasobników energii stwierdza się, że dla akumulatorów ołowiowych jest 300÷500 razy większa niż dla paliwa płynnego w zbiorniku. Ponieważ sprawność silników elektrycznych jest średnio około 3 razy większa niż silników spalinowych, to stosunek ten obniża się, ale wciąż wynosi 100÷170 na niekorzyść napędów elektrycznych. Wynika z tego, że samochód zasilany z akumulatorów, ze względu na masę, nie może być pojazdem przeznaczonym do pokonywania długich tras.
2.2. Charakterystyki prędkościowe silników spalinowych
Do oceny silnika stosowanego do napędu samochodu szczególnie przydatne są wszystkie charakterystyki podające cechy eksploatacyjne tego silnika w funkcji prędkości kątowej wału napędowego, w przypadku silnika tłokowego - w funkcji prędkości kątowej wału korbowego. Charakterystyki te noszą ogólną nazwę charakterystyk prędkościowych.
Eksploatacyjna charakterystyka prędkościowa przedstawia zależność od prędkości kątowej wału korbowego następujących wielkości: mocy użytecznej N, momentu obrotowego M., średniego ciśnienia użytecznego pc, zużycia paliwa G i jednostkowego zużycia paliwa gc . Charakterystykę tę sporządza się najczęściej drogą pomiarów na hamowni silnikowej w warunkach ustalonych. Urządzenie zasilające i zapłonowe silnika są wyregulowane tak, jak podczas normalnej eksploatacji silnika, zaś 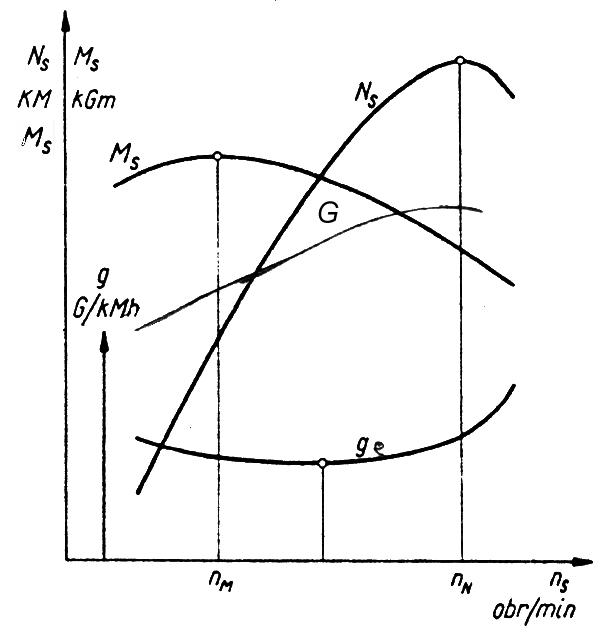
przepustnica otwarta całkowicie.
Rys. 4. Prędkościowa charakterystyka eksploatacyjna silnika samochodowego - wielkości charakterystyczne.
Charakterystyka zewnętrzna lub charakterystyka pełnej mocy wykonywana jest w ten sposób, że dla każdej prędkości kątowej uzyskuje się maksymalną moc przez najkorzystniejszy dobór regulacji zasilania i zapłonu.
Na charakterystyce zewnętrznej silnika osi odciętych można wyodrębnić następujące punkty charakterystyczne:
ωo - najmniejsza praktyczna prędkość kątowa silnika w czasie jego pracy z obciążeniem zewnętrznym
ωm. - prędkość kątowa silnika przy której moment obrotowy osiąga swoją największą możliwą wartość
ωg - prędkość kątowa silnika, przy której występuje najniższe możliwe jednostkowe zużycie paliwa (0,65-0,75) ωmax.
ωn - prędkość kątowa silnika, przy której moc użyteczna uzyskuje swoją największą możliwą wartość
ωmax - największa prędkość kątowa silnika, przy której może pracować bez zakłóceń.
Należy jeszcze wspomnieć o prędkości kątowej biegu jałowego silnika ωj najmniejszej, przy której może on się obracać bez obciążenia zewnętrznego przy zamkniętej przepustnicy. Prędkość ta jest nieco mniejsza od ωo.
Przedstawiona powyżej charakterystyka jest typowa dla silników gaźnikowych. W silnikach o zapłonie samoczynnym krzywe N i M. mają przebieg bardziej płaski, co jest związane z właściwościami pomp wtryskowych. Dlatego krzywa N = f(ω) zwykle nie osiąga swego maksimum w zakresie użytecznych prędkości kątowych silnika. Decydująca jest tu tzw.
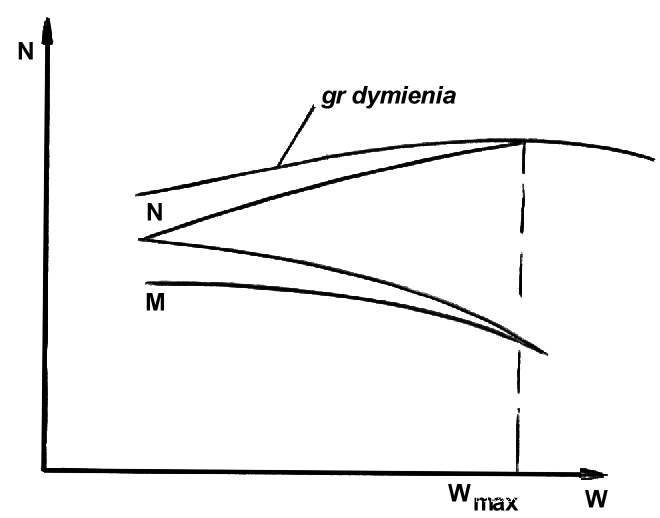
Rys.5a. Granica dymienia
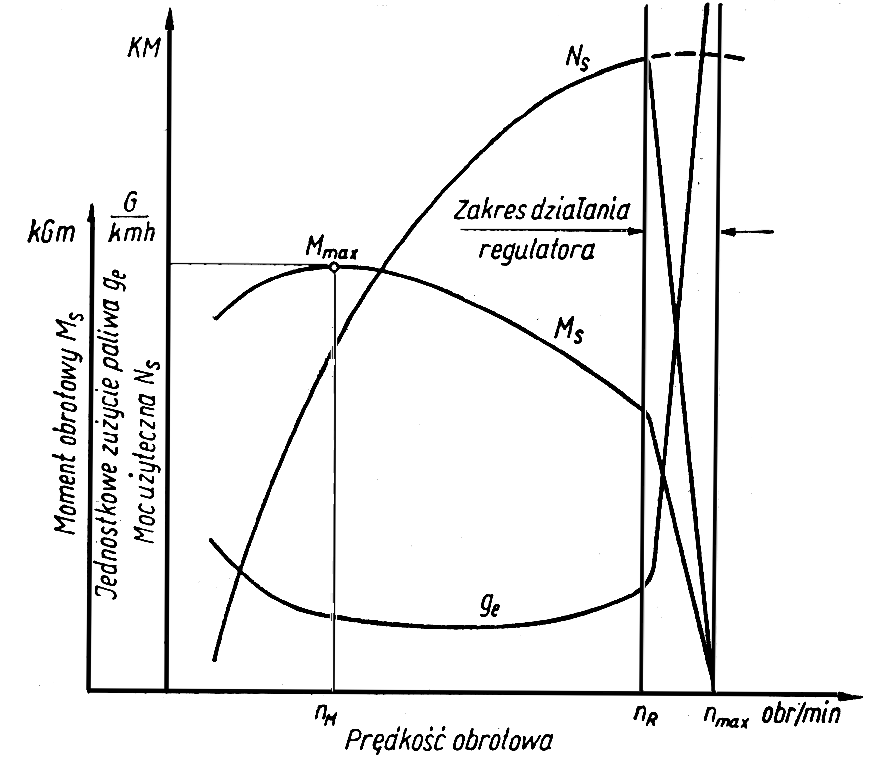
Rys.5b. Charakterystyka eksploatacyjna silnika zaopatrzonego w regulator obrotów
Punkt przecięcia charakterystyki eksploatacyjnej z charakterystyką granicy dymienia wyznacza maksymalną moc eksploatacyjną silnika. Jeżeli silnik wyposażony jest w regulator prędkości obrotowej to wtedy charakterystyka eksploatacyjna ma przebieg następujący i zwana jest charakterystyką regulatorową.
2.3. Teoretyczne charakterystyki silnika samochodowego
2.3.1. Teoretyczna charakterystyka silnika spalinowego
W rzeczywistych silnikach spalinowych proces zamiany energii chemicznej w mechaniczną przebiega ze sprawnością zmieniającą się wraz z prędkością obrotową. Sprawność tylko przy pewnej prędkości obrotowej osiąga swoją wartość optymalną. Natomiast gdyby sprawność procesu była zawsze stała, co związane jest z idealnym napełnieniem cylindrów, to ilość energii uzyskana w jednostce czasu byłaby wprost proporcjonalna do liczby porcji dostarczonego paliwa. Czyli byłaby proporcjonalna do prędkości obrotowej silnika (Ns - linia prosta na wykresie na rys. ).
Ponieważ pomiędzy momentem obrotowym a mocą istnieje zależność
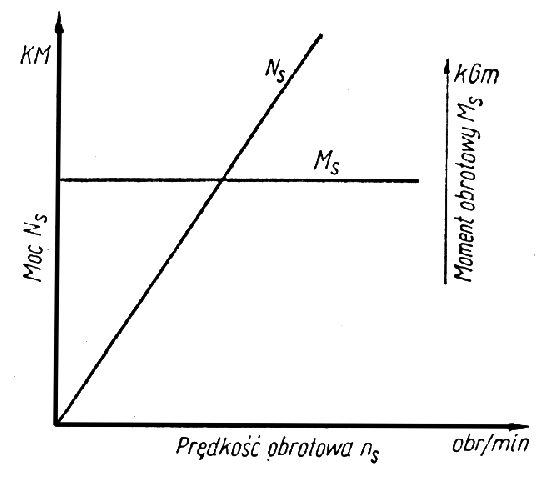
to wielkość momentu obrotowego silnika byłaby niezależna od jego prędkości obrotowej
Rys. 6. Teoretyczna zależność mocy i momentu obrotowego silnika od jego prędkości obrotowej przy założonej niezmiennej sprawności.
Rzeczywiste krzywe Ms i Ns są styczne w jednym punkcie do tych linii.
2.3.2. Charakterystyka idealna silnika trakcyjnego
Cechą wszystkich silników spalinowych tłokowych jest to, że duże moce można uzyskać tylko przy dużych prędkościach obrotowych. Przy małych prędkościach otrzymać można stosunkowo niewielką moc. W odniesieniu do napędu samochodów jest to cecha niekorzystna i silnie wpłynęła na konstrukcję układu napędowego. Najkorzystniej byłoby, aby silnik dostarczał w razie potrzeb moc maksymalną stale, niezależnie od prędkości kątowej wału. W tym przypadku moc w funkcji prędkości kątowej byłaby wielkością stałą, a krzywa momentu obrotowego w myśl zależności
byłaby hiperbolą.
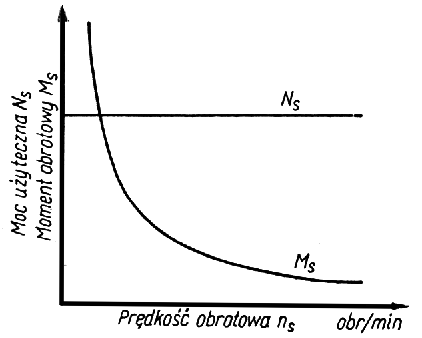
Jest to idealna charakterystyka silnika napędowego do pojazdu mechanicznego
Rys. 7. Kształt pożądanej idealnej charakterystyki silnika napędowego dla pojazdu mechanicznego
2.4. Metody sporządzania charakterystyk silnika spalinowego
Wyróżnia się następujące metody sporządzania charakterystyk silnika:
stanowiskowe
obliczeniowe
obliczeniowo-wykreślne.
Metody stanowiskowe polegają na dokonywaniu pomiarów momentu obrotowego i zużycia paliwa silnika pracującego na hamowni silnikowej. Pomiarów dokonuje się dla wielu wartości prędkości kątowej wału korbowego, zachowując właściwe warunki pomiaru. Na podstawie zmierzonych wartości oblicza się pozostałe parametry silnika i wykreśla charakterystyki.
M[Nm.] ω [rad/s]
Vs[m3], M[Nm]
Zagadnienie to państwo poznają dokładnie w ramach przedmiotu „Silniki spalinowe”.
Metody obliczeniowe polegają na wyrażeniu zależności funkcyjnej za pomocą przybliżonego wzoru empirycznego.
Dostatecznie dokładnym przybliżeniem jest założenie, że krzywe przebiegu momentu jest wyrażona jako parabola drugiego stopnia. Krzywe przebiegu mocy Ns = f(n) będzie wtedy parabolą trzeciego stopnia.
Dane katalogowe samochodu zawierają najczęściej moc maksymalną przy odpowiadających jej obrotach - Nemax/nN, moment maksymalny także przy odpowiadających mu obrotach - M.max/nM
Przyjmujemy zatem, że znamy wierzchołki szukanych paraboli, zaś ze wzoru
[kW]
obliczamy odpowiednio po jednym punkcie, należącym do paraboli (MN, NM).
Moc określamy ze wzoru Ledermana (w punktach n)
gdzie współczynniki określane są następująco:
A1=A2=1 dla ZI
A1=0,5; A2=1,5 dla ZS - wtrysk bezpośredni
A1=0,6; A2=1,4 dla ZS - komora wstępna
A1=0,7; A2=1,3 dla ZS - komora wirowa
a następnie moment ze wzoru M = 9550 N/n [Nm]
2. Moment obrotowy obliczamy ze wzoru Hahna o postaci:
Równanie to można przekształcić do postaci wygodniejszej przy obliczeniach trakcyjnych
wyznaczając współczynnik równania kwadratowego. Będą one tu miały postać
Następnie oblicza się moc ze wzoru
[kW]
Na podstawie obliczonych wartości M i N wykreśla się charakterystykę.
Metody obliczeniowo-wykreślne polegają na wykorzystaniu geometrycznych właściwości krzywych M, N charakterystyki. Z danych katalogowych znane są Nmax i Mmax oraz odpowiednie wartości prędkości. Pozostałe punkty charakterystyczne NM i MN oblicza się jak w poprzedniej metodzie. Dodatkowo można przyjąć (za Mitschke) wartości:
Rodzaj samochodu |
|
|
|
|
ZI |
S. osob. |
0,74 |
1,09 |
5,7 |
ZS |
S. osob. |
0,74 |
1,07 |
5 |
|
S. ciężar. |
0,91 |
1 |
2,6 |
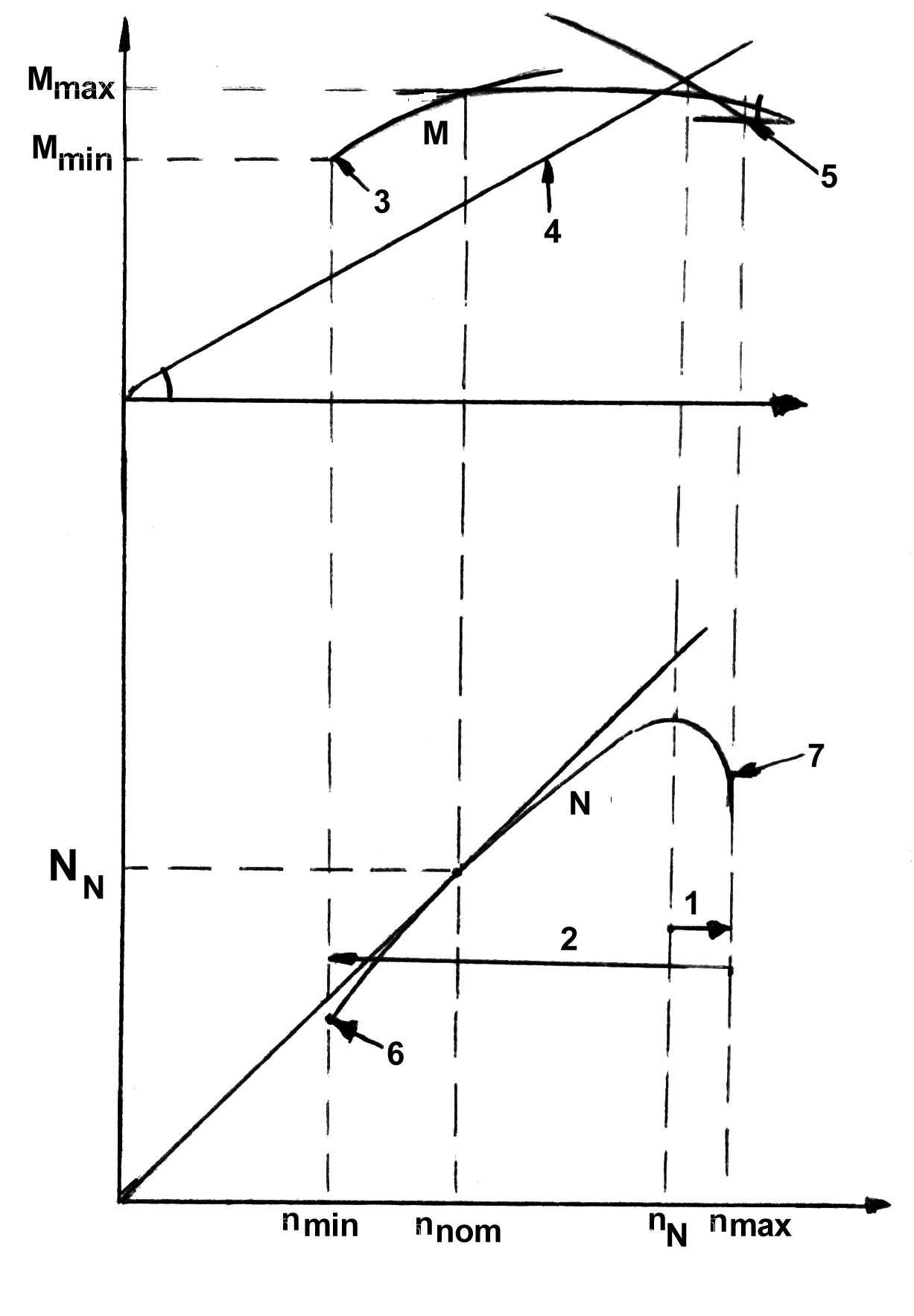
Charakterystyki Me i Ne wykreśla się według schematu przedstawionego na rys. .
Krzywa Me jest styczna do prostej pionowej w p.Mmax i prostej pod kątem wyznaczonym przez M.N. Krzywa Ne jest styczna do prostej przechodzącej przez punkty 0 i NM. Kolejne kroki postępowania ponumerowane są od 1 do 7.
2.5. Elastyczność silnika samochodowego
Elastyczność silnika samochodowego jest to zdolność przystosowania się silnika do zmiany obciążenia. Właściwość ta ma istotny wpływ na konstrukcję układu napędowego i właściwości trakcyjne pojazdu.
Sposób reagowania silnika na zmianę obciążenia zależy od przebiegu krzywych momentu obrotowego M=f(ω). Im bardziej stromo wznosi się krzywa momentu w miarę zmniejszania się prędkości kątowej tym mniejszym zmianom ulega prędkość kątowa przy zwiększeniu obciążenia silnika.
Mniejszy spadek prędkości czyni pracę silnika bardziej stateczną, zatem taki silnik jest bardziej elastyczny.
Przedstawimy pojęcie elastyczności pracy silnika.
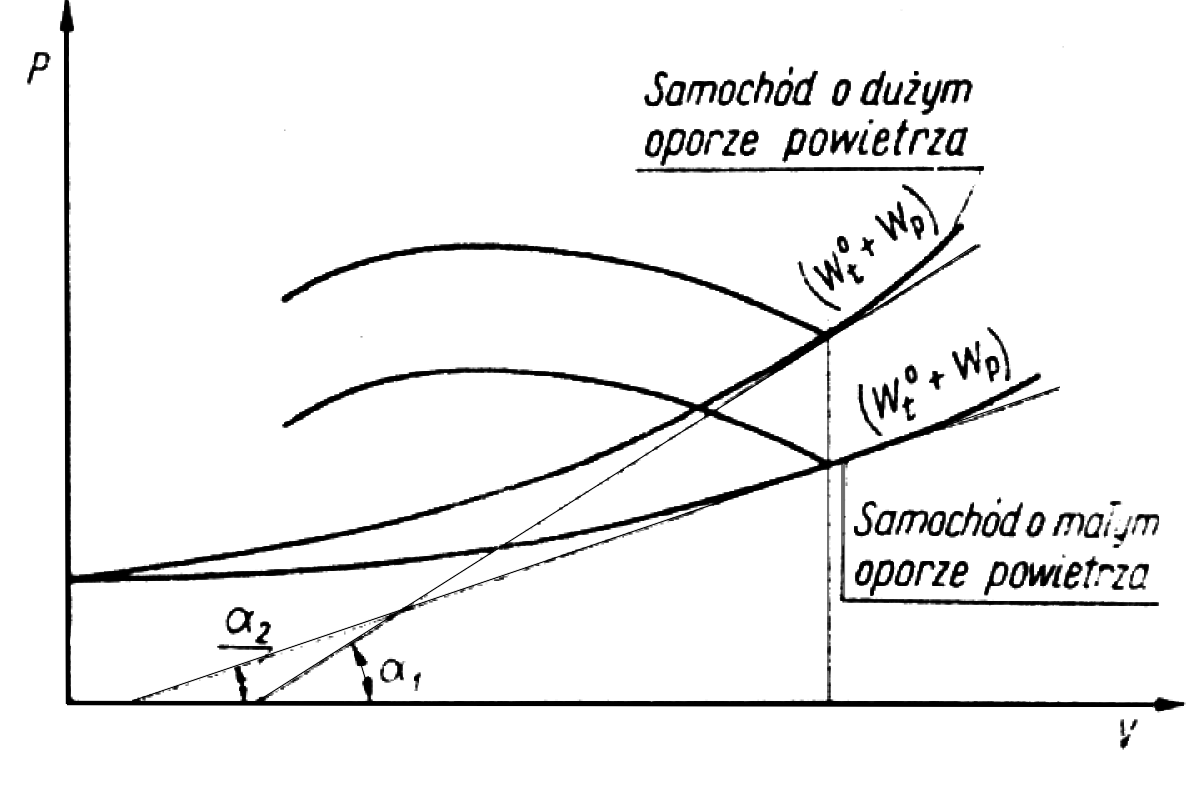
Rys. 8. Wpływ oporu powietrza na elastyczność samochodu.
Krzywe 1 i 2 to charakterystyki dwóch silników. Krzywe Mop1 i Mop2 to krzywe momentu oporów.
Zwiększenie oporów od Mop1 i Mop2 np. wskutek pojawienia się wzniesienia drogi i powoduje mniejszy spadek prędkości kątowej silnika o charakterystyce 1, czyli o bardziej stromym przebiegu. Zatem silnik 1 pracuje bardziej statecznie i ma większą elastyczność.
Do oceny elastyczności silnika wykorzystuje się wskaźniki: elastyczności momentu i elastyczności prędkości kątowej oraz wskaźnik elastyczności całkowitej.
Wskaźnik elastyczności momentu obrotowego to stosunek
przy czym dla silnika z regulatorem za MN podstawia się MZN
Przeciętnie dla silników ZI em=1,1÷1,3
ZS em=1,05÷1,15
Wskaźnik elastyczności prędkości kątowej wyraża się stosunkiem
przy czym dla silnika z regulatorem zamiast
jest
Przeciętnie
,
im większa jest wartość
tym większy jest zakres pracy silnika i lepiej nadaje się do celów trakcyjnych.
Wskaźnik elastyczności całkowitej jest to iloczyn
Został on wprowadzony w celu scharakteryzowania całkowitej elastyczności silnika za pomocą jednej tylko wielkości. Przeciętnie wartości
E=1,5÷2,5
do celów trakcyjnych korzystniejszy jest silnik o dużych wartościach wskaźnika elastyczności.
Podział silników pod względem elastyczności (wg Dębickiego)
- nie elastyczne <1,6
- mało elastyczne 1,6-2,0
- średnio elastyczne 2,0-2,8
- wysoko elastyczne 2,8-3,8
- o bardzo dużej elastyczności >3,8
2.6. Charakterystyki częściowe silnika.
Krzywe mocy Ns=f(ns) i momentu obrotowego Ms=f(ns) na charakterystykę eksploatacyjną przedstawiają maksymalne możliwości silnika w warunkach doprowadzenia do cylindrów silnika maksymalnej ilości paliwa możliwej do spalenia. W przypadku doprowadzenia do cylindra silnika mniejszych ilości paliwa uzyskuje się charakterystyki obciążeń częściowych. W silnikach gaźnikowych, które mają ilościową regulację czynnika roboczego uzyskuje się to częściowo otwierając przepustnicę, w silnikach wtryskowych, które mają jakościową regulację czynnika roboczego, przez zmianą ilości wtryskiwanego paliwa np. odpowiednio przesuwając zębatkę pompy wtryskowej.
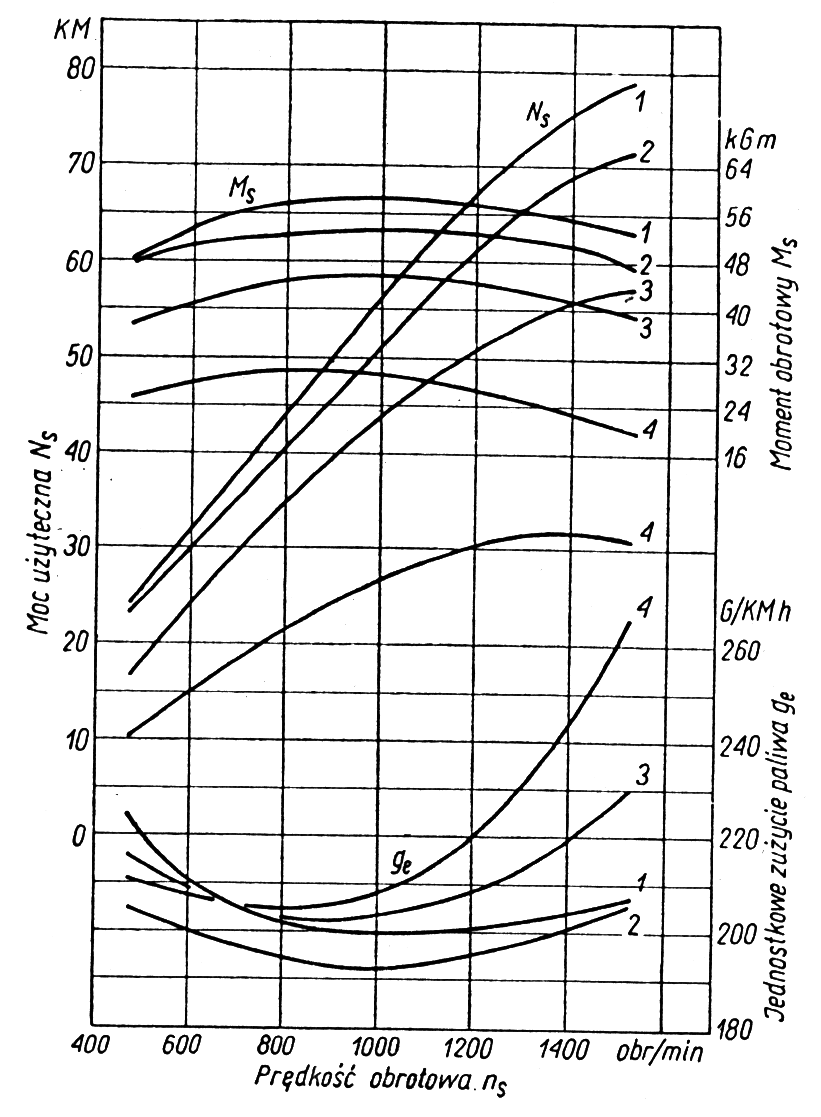
Rys. 9. Charakterystyka obciążeń częściowych.
Najczęściej wykonuje się charakterystyki 75%, 50%, 25% przekroju odsłoniętego przez przepustnicę lub dawki wtryskiwanego paliwa. Jak widać, przebieg charakterystyk częściowych Ne, Mo i ge jest różny dla silników gaźnikowych i wysokoprężnych, co wynika z właściwości działania tych silników.
2.7. Charakterystyka uniwersalna silnika.
Znajomość jednostkowego zużycia paliwa przy różnych obciążeniach i prędkościach obrotowych silnika jest bardzo istotna. Najwygodniejszą formą przedstawienia tego zagadnienia jest tzw. charakterystyka uniwersalna silnika. Charakterystyka ta, zwana także charakterystyką ogólną, przedstawia w układzie współrzędnych pe-n krzywe stałych wartości ge i Ne oraz krzywą pe odpowiadającą pełnemu otwarciu przepustnicy lub pełnej dawce paliwa.
Krzywe stałego jednostkowego zużycia ge oraz krzywą maksymalnych ciśnień pe uzyskuje się na podstawie badań silnika.
Zależności między mocą, momentem i średnim ciśnieniem efektywnym są następujące:
z pomiarów
[kW] M0[Nm] - z pomiarów
n[obr/min]
z definicji
[kW] pe[Mpa]
Vss[dm3]
Oraz pe=
[Mpa] τ=1, 2 - dwusuw, czterosuw
Zatem moment obrotowy jest proporcjonalny do ciśnienia efektywnego,
natomiast krzywe stałych mocy stanowią rodzinę hiperbol równobocznych, które nanosi się na wykres.
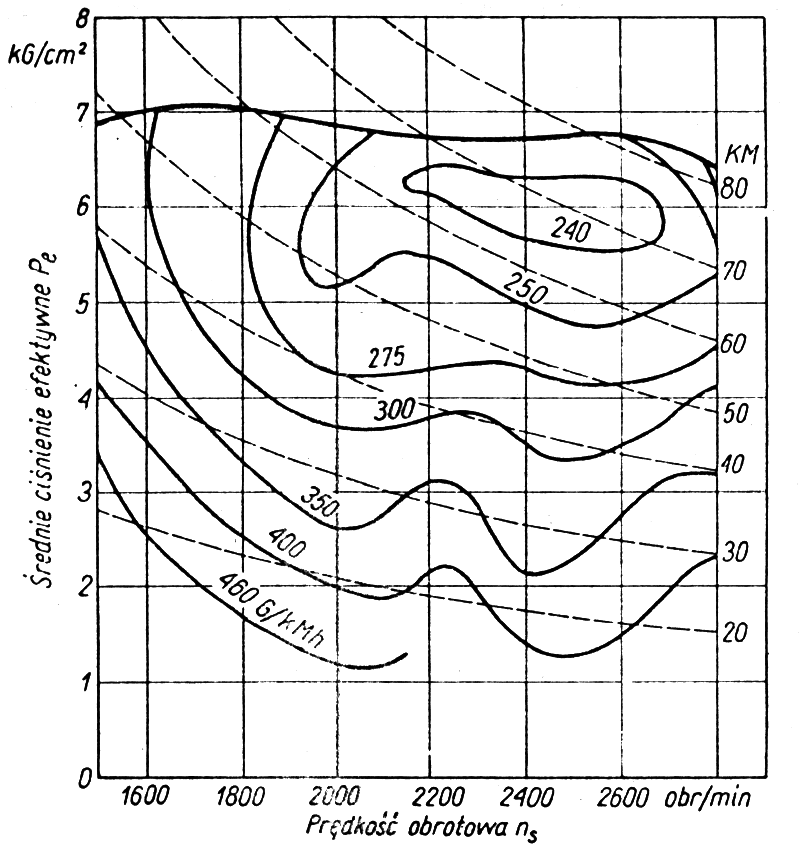
Rys. 10. Charakterystyka uniwersalna silnika.
----- krzywe stałej mocy Ns = const (KM)
krzywe jednostkowego zużycia paliwa ge = const (G/KMh)
Charakterystyka uniwersalna ułatwia analizę właściwości silnika i porównywania silników czy większe są powierzchnie małych ge tym silnik może być bardziej ekonomiczny.
2.7.1. Wstępny dobór silnika do samochodu
Charakterystyka uniwersalna umożliwia wstępny dobór silnika jako zespołu napędowego samochodu o ustalonych uprzednio oporach ruchu wynikających z przewidywanych prędkości jazdy, zdolności do pokonywania wzniesień i przyśpieszeń.
a)
Dla samochodów ciężarowych, autobusów lub samochodów osobowych o małym stosunku
warstwica minimalnego ge mieści się pomiędzy parabolami drugiego stopnia przechodzącymi przez Mmax (opory przyspieszenia i wzniesienia) i przez MN (opory jazdy poziomej), n(MN) - wyznacza max prędkość jazdy na biegu bezpośrednim.
Pojazd wtedy będzie ekonomiczny gdyż silnik najczęściej jest wykorzystywany w obszarze małych ge.
b)
Dla samochodów osobowych średniej klasy o dużym stosunku
warstwica minimalnego ge przecinana jest linią oporów ruchu na drodze poziomej.
Prędkość dopuszczalna ndop wynika z dopuszczalnej prędkości jazdy ograniczonej przepisami ruchu drogowego.
Charakterystyka uniwersalna jest również podstawą doboru przełożeń skrzyni przekładniowej i przekładni głównej.
2.8 Moce silnika.
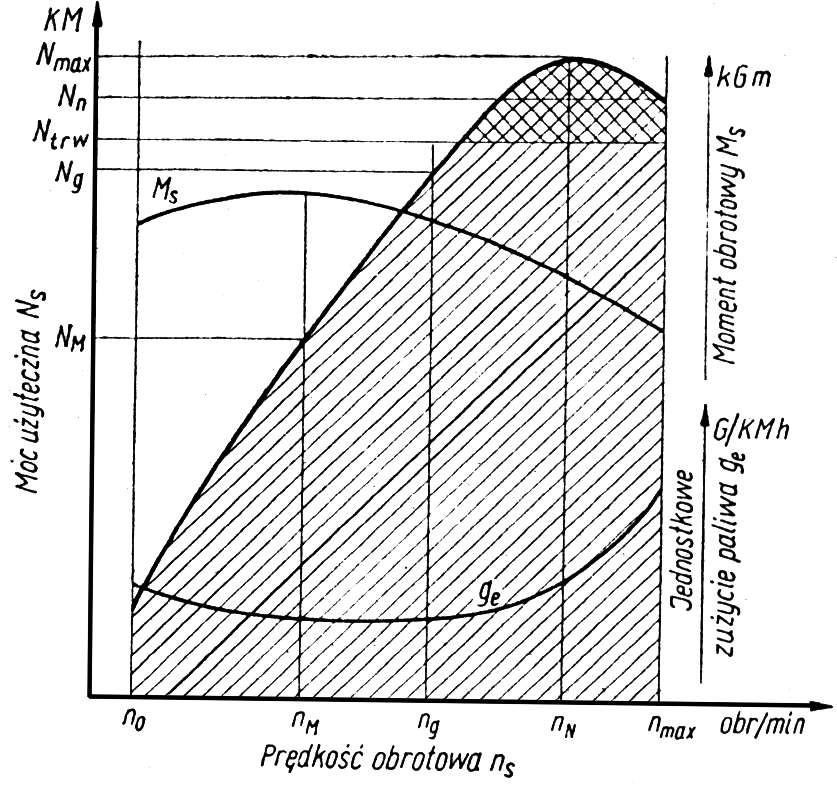
Rys. 11. Charakterystyka eksploatacyjna silnika i pole podaży mocy
Nmax - moc maksymalna silnika, osiągalna bądź to przy największej prędkości obrotowej silnika nmax, bądź też przy nieco niższej prędkości nN.
Nn - największa moc możliwa do uzyskania przy maksymalnej prędkości obrotowej silnika Nmax.
Ntrw - moc trwała; największa moc, jaką silnik może rozwijać przez dłuższy czas, bez obawy zakłócenia równowagi cieplnej silnika. Silnik może przekraczać swoją moc trwałą jedynie na krótkie okresy czasu. Niejednokrotnie moc trwała może być równa mocy maksymalnej silnika i wtedy wielkość oddzielnie nie występuje.
Ng - moc ekonomiczna; moc odpowiadająca najmniejszemu jednostkowemu zużyciu paliwa możliwemu do uzyskania przy pracy silnika z pełnym otwarciem przepustnicy lub pełnym dawkowaniem pompy wtryskowej.
Nm - moc odpowiadająca największemu możliwemu do uzyskania momentowi obrotowemu silnika.
Moc znamionowa NZN - moc danego silnika przy określonej przez wytwórnię znamionowej prędkości obrotowej nZN. Ze względu na stosowane znormalizowane warunki, w jakich odbywa się pomiar mocy silnika, wyróżnia się moc „brutto” i moc „netto”.
Moc „brutto” (moc pełna) NBR jest to moc silnika zmierzona przy zdjętym wentylatorze, przewodzie wlotowem, odłączonym przewodzie wydechowym, odłączonym napędzie prądnicy, przy indywidualnie regulowanym dla każdej prędkości obrotowej gaźnika i zapłonie oraz przy zredukowaniu wyników na temp. otoczenia 15,6 oC i ciśnienie barometryczne 746,5 mmHg.
Te warunki pomiarów są ustalone amerykańską normą SAE i często moc silnika zmierzona w ten sposób określana jest jako „moc SAE”.
Moc „netto” NNET jest to moc silnika zmierzone przy obracającym się wentylatorze, włączonym napędzie prądnicy, złożonym filtrze powietrza, czynnym podgrzewaniu przewodu wlotowego i założonym przewodzie wydechowym lecz bez tłumika. Jeżeli pomiar mocy „netto” wykonany został zgodnie z normą niemiecką DIN, to tak zmierzona moc „netto” określona bywa jako „moc DIN”. Warunki pomiaru według normy DIN to ciśnienie barometryczne 760 mmHg i temp. powietrza 20oC . Podobny sposób pomiaru mocy „netto” przewidują Polskie Normy, przy czym jako warunki normalne PN określa ciśnienie 100 kPa i temp. powietrza 25oC.
Moc silnika „netto” (moc DIN) jest przeciętnie niższa od mocy „brutto” (moc SAE) o 10-20%.
NNET = 0,8÷0,9 NBR
Moc „pod maską” Nm - rzeczywista moc silnika zamontowanego w samochodzie.
Jest niższa niż moc „netto” z powodu wyższej temp. powietrza pod maską zmiennego ciśnienia, zamontowanego długiego przewodu wydechowego z tłumikiem.
Nm = 0,93÷0,95 NNET
3. OGÓLNA TEORIA KOŁA OGUMIONEGO
Elementem samochodu, współpracującym bezpośrednio z jezdnią jest koło ogumione. Na koło działają siły:
ciężkości
oporów toczenia
bezwładności
reakcje jezdni, występują - reakcje pionowe (Z),
- reakcje styczne
Reakcje styczne są:
obwodowe (X)
boczne (Y)
Zależności między prędkością jazdy, prędkością obrotową silnika i ruchem kół są następujące:
[m/s]
gdzie: v[m/s] - prędkość samochodu, czyli środka obrotu koła,
rt[m] - promień toczny koła,
[rad/s] - prędkość kątowa koła.
[m/s] nk[obr/min] - prędkość obrotowa koła
3,6
[km/h]
gdzie: ic -przełożenie całkowite,
is - położenie skrzyni biegów,
ir - położenie reduktora,
io - położenie w moście napędowym (przekładni głównej).
Wzór ten jest słuszny w przypadku, gdy nie ma poślizgu w sprzęgle głównym. Występuje jednakże inny poślizg na kole tzw. poślizg odkształceniowy.
Oznaczamy go za pomocą współczynnika uwzględniającego poślizg - λ.
Zatem
λ=0,97÷0,99 (na twardej nawierzchni)
3.1. Promienie kół.
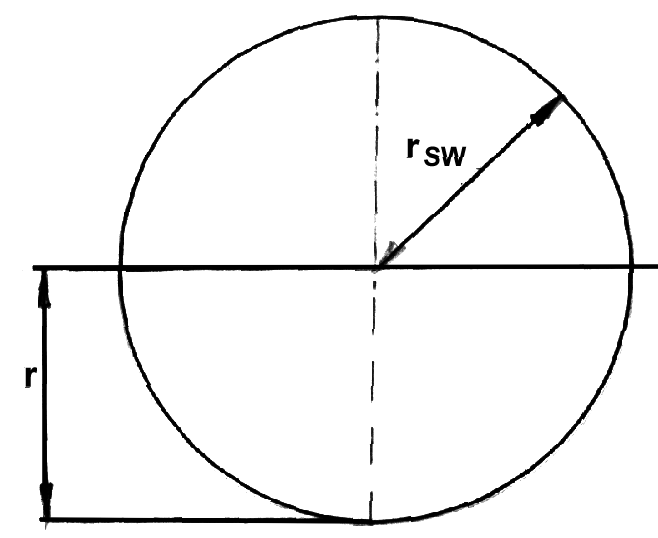
Rys. 12. Promienie kół
Wyróżnia się następujące promienie kół: rsw, rst, rd, rt
r = rst - gdy pojazd stoi,
r = rd - gdy pojazd porusza się.
Promień swobodny koła rsw - jest to połowa największej średnicy koła (na środku bieżnika) przy kole nie obciążonym żadnymi siłami zewnętrznymi, przy oponie napompowanej powietrzem do ciśnienia katalogowego przewidzianego dla największego dopuszczalnego obciążenia opony.
Promień statyczny koła rst - jest to odległość środka koła od nawierzchni, przy kole ustawionym w płaszczyźnie pionowej, przy największym dopuszczalnym dla danej opony obciążeniem pionowym i przy przewidzianym dla tego obciążenia ciśnienia powietrza w oponie.
Promień dynamiczny koła rd - jest to odległość środka koła od linii działania stycznej reakcji nawierzchni, w dowolnych określonych warunkach ruchu, przy kole obciążonym określonymi siłami i określonymi momentami.
Jak widać z tego promień dynamiczny koła jest wielkością zmienną, zależną od każdorazowych warunków ruchu. Promień dynamiczny jest ramieniem momentu wzdłużnej stycznej reakcji nawierzchni względem osi koła.
Promień toczny koła rt - jest promień fikcyjnego koła sztywnego, które tocząc się bez poślizgu z tą samą prędkością kątową co dane koło elastyczne toczące się w danych warunkach ruchu, będzie miało tą samą prędkość postępową v w środku koła. Ponieważ
, promień toczny możemy określić jako stosunek prędkości liniowej środka koła do jego prędkości kątowej.
Promień ten możemy określić ze wzoru
, gdzie: l - droga przebyta przez środek toczącego się koła elastycznego, po wykonaniu nk obrotów koła. W różnych warunkach ruchu promień toczny może się zmieniać w granicach od zera do nieskończoności.
Obwód obtaczania - jest to droga przebyta przez koło w ciągu 1 obrotu. Podawany jest w katalogach i może być wykorzystany do wyznaczenia promienia dynamicznego rd.
3.2. Ogumienie
Ogumienie oznaczamy nastepująco
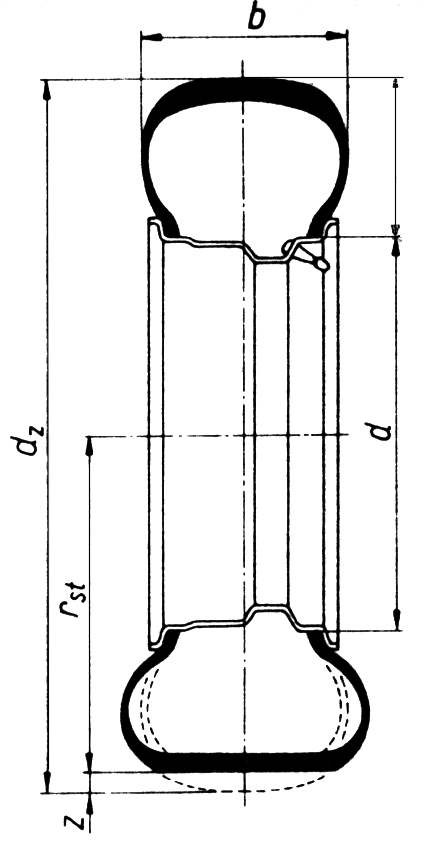
Rys. 13. Koło ogumione.
Dobr - ∅ obręczy w calach
h - wysokość profilu opony w calach , mm
b - szerokość profilu opony w mm
h=(0,8÷1)b
Nominalny promień koła rn(vsw)
Statyczny promień koła vst
λ -współczynnik promieniowego odkształcenia opony odniesiony do ∅ przy pełnym obciążeniu.
λ=0,10÷0,16
λ=0,20÷0,30 - dla opon rolniczych i walcowych (o dużej szerokości).
Rodzaje opon:
diagonalna - włókna osnowy krzyżują się pod kątem
,opasana (diagonalna z opasaniem) - oznaczona literą B -oprócz osnowy na dodatkowe warstwy wzmacniające,
radialna - oznaczona literą R- włókna osnowy ułożone są promieniowo, dodatkowo jest pas usztywniający, w którym włókna krzyżują się pod kątem
.
Oznaczanie opon - podaje się szerokość opony (b) i średnicę obręczy Dobr.
165SR13
185/70SR13
Oznaczenia nowe
185/70R13 84 Q
Promień dynamiczny podawany w katalogach odpowiada prędkości jazdy v = 60 km/h. W praktycznych obliczeniach można przyjąć, że rt=rd=const. Przyjmujemy także, że rd = rk. rk - promień kinematyczny.
Przyjmuje się, że:
rd = δ rsw δ = 0,940 - s. osobowe
δ = 0,955 - s. ciężarowe
Sztywność ogumienia podaje się w N/mm.
Tabela 2. Sztywność ogumienia [N/mm]
Sztywność |
Samochody |
|
|
Osobowe |
Ciężarowe i autobusy |
Promieniowa |
100÷250 |
250÷500 |
Obwodowa |
700÷1000 |
1500÷3000 |
boczna |
80÷150 |
200÷300 |
Sztywność w kierunku bocznym jest najmniejsza - jest to bardzo źle. Podobnie, jak w kierunku obwodowym, ważne jest by sztywność była jak największa.
3.3. Sprawność koła ogumionego
Sprawność koła ogumionego określamy za pomocą współczynnika poślizgu.
Przy kole napędzanym
v - rzeczywista prędkość jazdy v = rt ⋅ ωk
vk - prędkość obwodowa na promieniu dynamicznym vk = rd ⋅ ωk
ωk - prędkość kołowa koła.
Pełny poślizg występuje gdy S = 1
rt → 0 - ze zwiększeniem się poślizgu rt maleje i odwrotnie.
Przy kole hamowanym współczynnik poślizgu
gdy koło jest zablokowane to
3.4. Poślizg koła jezdnego
Wyróżnia się dwa rodzaje poślizgu:
poślizg
ślizganie się
Omówimy pojęcie poślizgu na przykładzie koła sztywnego współpracującego ze sztywną nawierzchnią. Ruch koła jest sumą ruchu postępowego z prędkością v i obrotowego z prędkością ω.
Toczenie się koła bez poślizgu
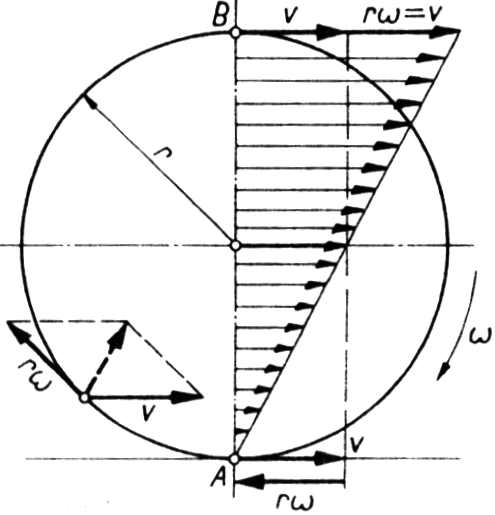

Rys. 14. Toczenie się koła sztywnego bez poślizgu.
Punkt A jest chwilowym środkiem obrotu
Koło jest napędzane
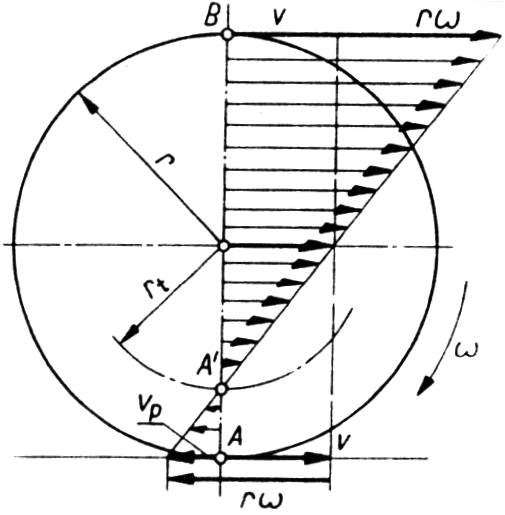
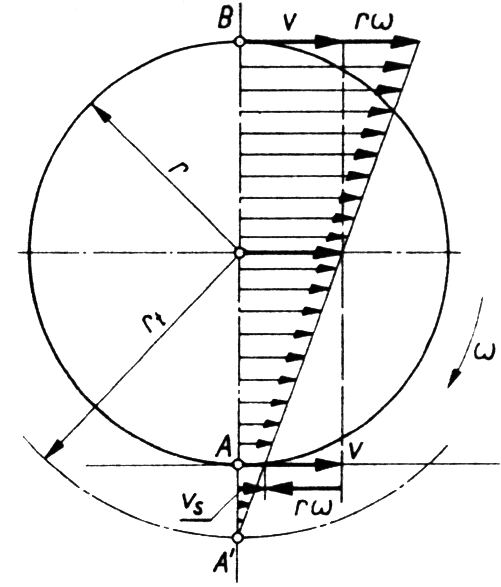
Rys. 15. Toczenie się koła sztywnego z poślizgiem.
Prędkość poślizgu
Punkt
jest chwilowym środkiem obrotu, na promieniu rt<r oraz
.
Poślizg względny
gdzie
przy v=0
gdy rt=0 wtedy Sn=1 - pełny poślizg
gdy rt=r wtedy Sn=0 - brak poślizgu
Rys. 16. Toczenie się koła sztywnego ze ślizganiem.
Koło jest hamowane
Prędkość ślizgania
Punkt
jest chwilowym środkiem obrotu, na promieniu rt>r oraz
.
Ślizganie względne
gdzie
przy
gdy rt=r wtedy Sh=0 - brak ślizgania
gdy rt=∞ wtedy Sh=1 - pełne ślizganie
3.5. Model koła ogumionego
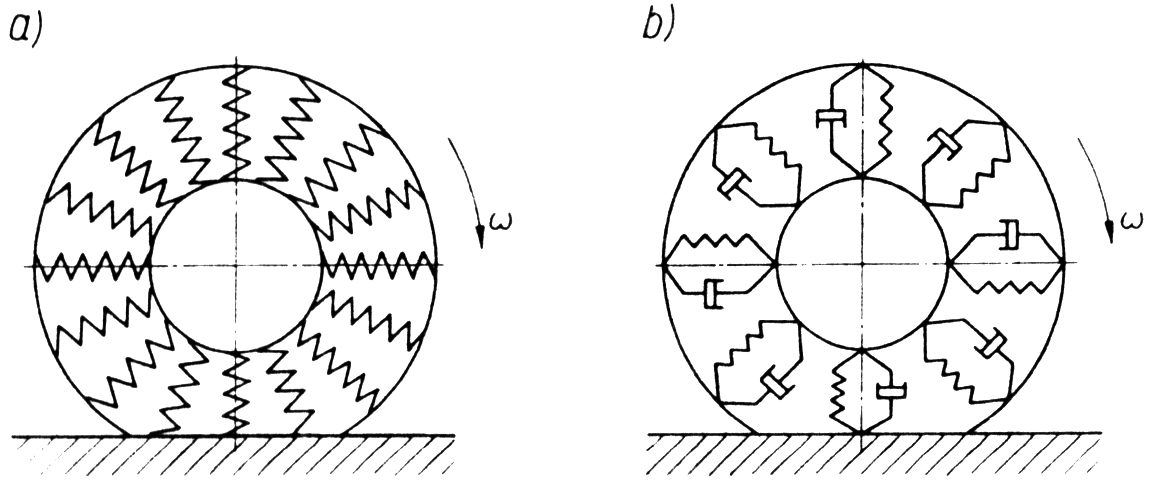
Rys. 17. Model koła ogumionego.
Składniki modelu koła ogumionego to: sztywna obręcz (felga) i elastyczna opona oraz nawierzchnia doskonale sztywna. Można uzupełnić o sprężynki na obwodzie - (sztywność obwodowa).
Sztywność promieniowa - same sprężyny - koło doskonale sprężyste, sprężyny z tłumikami - koło o charakterystyce częściowo sprężystej.
Koło ogumione ma charakterystykę częściowo sprężystą słabo nieliniową czyli przyjmuje się praktycznie charakterystykę liniową więc
Tabela .3. Sztywność ogumienia N/m.
Sztywność |
Samochody |
|
|
Osobowe |
Ciężarowe i autobusy |
Promieniowa |
100-250 |
250-500 |
Obwodowa |
700-1000 |
1500-3000 |
Boczna |
80-150 |
200-300 |
Sztywność w kierunku bocznym jest najmniejsza - jest to bardzo źle. Podobnie jak w kierunku obwodowym ważne jest aby ta sztywność była jak największa.
Koło ogumione współpracujące z jezdnią odkształca się. Wprowadzając sprężynki obwodowe do modelu uwidocznić można, że część stykająca się z podłożem jest bardziej ściśnięta niż pozostałe.
Rys. 18. Wyjaśnienie zjawiska poślizgu odkształceniowego
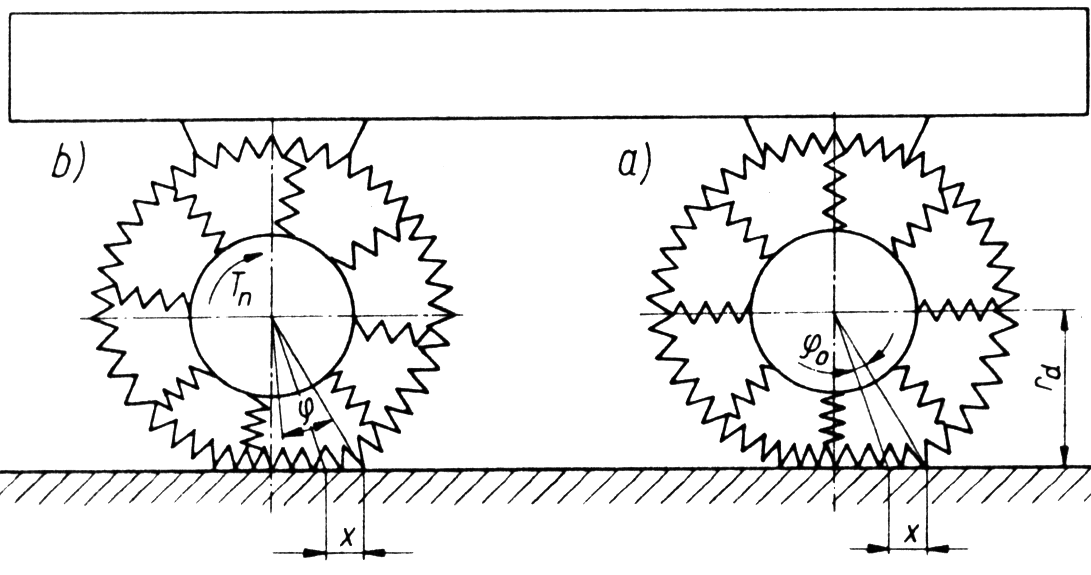
Jeżeli koło zostanie poddane działaniu momentu napędowego M to nastąpi pewne przemieszczenie kątowe piasty względem opony i dodatkowe ściśnięcie opony przed miejscem styku z jezdnią.
Przebycie odcinka drogi x przez koło toczące się swobodnie wymaga na jednostkę drogi koła o kąt
, natomiast koło napędowe musi obrócić się o większy kąt
ze względu na większe ściśnięcie opony. Występuje tu zatem poślizg względny zwany odkształceniowym, gdyż powstaje wyłącznie wskutek odkształceń sprężystych opony. Cząstki opony stykające się z nawierzchnią nie zmieniają względem niej swego położenia.
Zatem poślizg
Podczas hamowania następuje zmiana kierunku odkształceń obwodowych i odpowiednio
Czyli poślizg względny
Bardziej precyzyjnie należy wyrazić poślizg za pomocą różniczek np.:
Biorąc pod uwagę, że
można prędkości kątowe wyrazić jako
oraz
A stąd poślizgi względne
Zatem przy kole ogumionym poślizg wyraża się podobnie jak przy kole sztywnym, jedynie zamiast promienia koła sztywnego r występuje promień dynamiczny rd.
Poślizg koła ogumionego jest złożony:
rzeczywisty - taki jak przy kole sztywnym,
odkształceniowy.
3.6. Przyczepność koła jezdnego do nawierzchni
3.6.1. Współczynnik przyczepności
Siły styczne powodujące ruch pojazdu nie mogą przekroczyć wartości siły przyczepności
,
określanej analogicznie do siły tarcia. Stosunek siły przyczepności do nacisku koła na powierzchnię jest to współczynnik przyczepności
Gdy Y=0 to
Przy dużych siłach stycznych następuje poślizg koła. Zmiana wartości współczynnika przyczepności w zależności od poślizgu jest przedstawiona na rys. 19.
Przebieg zmian
jest w przybliżeniu taki sam dla napędu i hamowania. Największa wartość
zwana współczynnikiem przyczepności przylgowej
występuje przy poślizgu
. Przy poślizgu stuprocentowym współczynnik przyczepności mniejszy
- zwany współczynnikiem przyczepności poślizgowej.
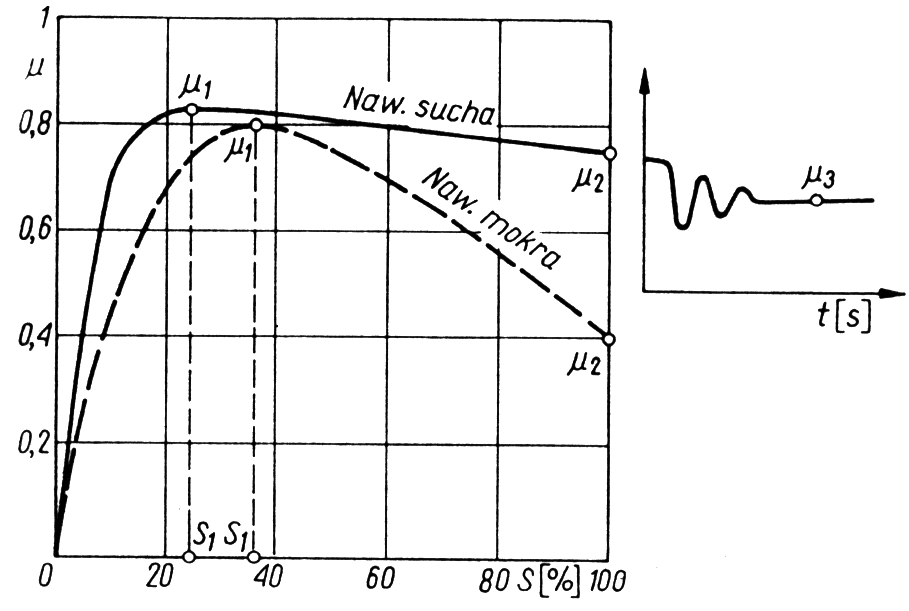
Rys. 19. Współczynnik przyczepności w funkcji poślizgu.
Jeżeli nawierzchnia pokryta jest wodą, pyłem, piachem, śniegiem to
. Rozpatrzmy wpływ sił bocznych Y (w przypadku znoszenia koła) na siłę przyczepności koła
. Gdy występuje znoszenie to powstaje wypadkowa
Wprowadzając
to
przyjmując =0,4 co uznano za wystarczające
- czyli wpływ bocznego znoszenia jest niewielki.
Wpływ na współczynnik przyczepności mają:
Rodzaj i jakość stanu nawierzchni drogi
Ogumienie: budowa, jakość, zużycie, rodzaj bieżnika
Nacisk jednostkowy
Występowanie poślizgu (wielkość przenoszonego momentu)
Szybkość jazdy i elastyczność zawieszenia
Tabela .4. Wartości współczynników przyczepności
Rodzaj nawierzchni |
Współczynnik przyczepności |
||
|
Przylgowy |
Poślizgowy |
|
Beton |
Suchy |
1,08-0,80 |
0,90-0,70 |
|
Mokry |
0,75-0,25 |
0,65-0,45 |
Asfalt |
Suchy |
1,08-0,70 |
0,90-0,60 |
|
Mokry |
0,50-0,40 |
0,40-0,30 |
Kostka granitowa sucha |
0,70-0,60 |
0,60-0,50 |
|
Żwirowa |
0,45 |
0,50 |
|
Betonowa oblodzona |
0,13-0,10 |
0,20-0,05 |
|
Model poślizgu
Poślizg koła ogumionego ogólnie nazywany jest poślizgiem złożonym, gdyż w polu styku opony z nawierzchnią występują obszary poślizgu odkształceniowego i obszary poślizgu rzeczywistego.
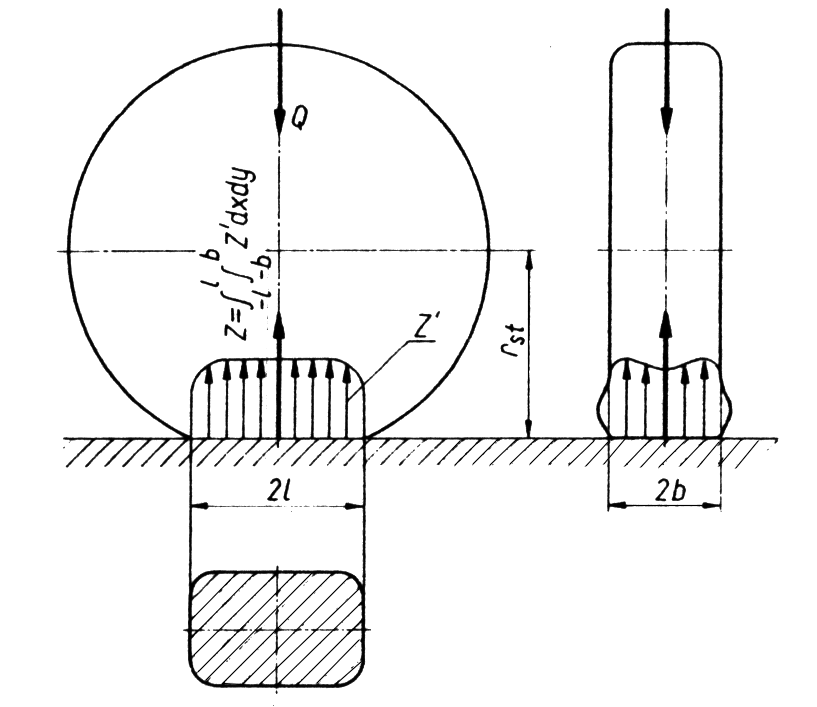
Rys. 20. Rozkład wzdłużnych stycznych reakcji nawierzchni działających na koło ogumione przy wzrastającym momencie napędowym.
Gdy koło znajduje się w spoczynku to rozkład elementarnych reakcji stycznych X′ jest symetryczny. Gdy wzrasta moment napędowy to zmienia się rozkład X′.
Przyczepność jest zachowana w całym polu styku z nawierzchnią dopóki żadna z elementarnych sił stycznych nie osiągnie granicy μ1Z′.
Wtedy w tym miejscu rozpocznie się poślizg rzeczywisty, a wartości reakcji spadają do μ2Z′.
Aquaplaning
Aquaplaning jest zjawiskiem polegającym na powstawanie klina wodnego, który unosi koło powodując utratę styku z nawierzchnią. Zatem opony muszą mieć możliwość odprowadzania wody z pola styku z nawierzchnią. Np. przy jeździe z prędkością 30 m/s = 108 km/h po nawierzchni pokrytej dwumilimetrowa warstwą wody na oponach o szerokości bieżnika 165 mm, konieczne jest usuwanie wody w ilości 10 l/s.
Reakcje kół jezdnych
Koło ogumione współpracując z jezdnią odkształca się. Powstaje ślad współpracy o kształcie jak na rys. 21.
Koło w spoczynku
Rys. 21. Koło ogumione w spoczynku.
Reakcja pionowa
Zk = Gk
zaś inne reakcje nie występują.
W stanie spoczynku naciski występują w środkowej części opony wg wykresów. Gdy przyłożymy moment napędzający lub hamujący to tam, gdzie naciski są małe, wcześniej następują poślizgi (u nas po brzegach śladu). Dopóki koło nie będzie buksować nazywamy to zjawisko poślizgami odkształceniowymi. W przypadku koła napędzanego to zjawisko nazywamy poślizgiem, ale w przypadku koła hamowanego to samo zjawisko nazywamy ślizganiem się.
Schemat działania sił i momentów na koło
3.7.2. Koło toczone
Oddziałują w tym przypadku następujące siły:
- boczne - Y (pomijamy w tej chwili),
- styczne - X,
- pionowe - Z.
W ogólnym przypadku (zmienna prędkość jazdy) występuje dodatkowo Mbk - moment bezwładności i Fbk - siła bezwładności przy przyspieszaniu.
Naciski z przodu śladu są większe ze względu na histerezę gumy. Wskutek tego reakcja pionowa Zk jest przesunięta o wielkość e.
Rys. 22. Koło w ruchu jednostajnym pod działaniem siły przyłożonej do osi.
Układ równań w ruchu jednostajnym jest następujący:
Gk - Zk = 0
Xk - Fa = 0
Xk ⋅ rd - ZK ⋅ e = 0
Stąd
gdzie
- współczynnik oporów toczenia koła toczonego
Z⋅e - moment wywołany przesuwaniem się reakcji pionowej do przodu
Z⋅e = Xk⋅rd = Zk⋅f⋅rd = Mt - moment oporów toczenia
Układ równań w ruchu przyspieszonym:
równanie sił pionowych
Gk - Zk = 0
Zk = Gk
równanie sił poziomych
Xk - Fa + Fbk = 0
równanie momentów wzgl. p. A
Z równania momentów wyznacza się reakcję wzdłużną
ponieważ
oraz
gdzie a- przyśpieszenie w ruchu postępowym, wtedy
Z równania sił poziomych wyznacza się siłę oddziaływania między kołem i pojazdem
ponieważ
to
3.7.3. Koło napędzane
Układ równań w przypadku pojawienia się momentu napędowego na kole jest następujący:
∑Fz = 0 czyli GK - ZK = 0
∑Fx = 0 czyli -Xk + Fa + Fbk = 0
Σ MA = 0 czyli
Z równania momentów względem p. A wyznacza się reakcję wzdłużną
gdzie
- siła napędowa
gdzie Zk⋅f - siła oporów toczenia,
- siła zużyta na przyspieszenie
Z równania sił Fa + Fbk - Xk = 0 wyznacza się siłę Fa
Fa = Xk - Fbk = Xk - mkb Zk = Gk
Układ równań w ruchu jednostajnym
Gk - Zk = 0
Fa - Xk = 0
Xk⋅rd + Mt - Mn = 0
Skąd
Zk = Gk
Fa = Xk =Fn - Gk⋅f
Sprawność koła napędzanego w ruchu jednostajnym
Moc doprowadzona do koła
Nk = Mn⋅ωk = Fn⋅rd⋅ωk
Moc przekazywana na podwozie
Na = Fa⋅v = Xk⋅v = Xk⋅rt⋅ωk
Moc stracona na skutek poślizgu
Moc stracona na pokonanie oporów toczenia
Nt = Ft⋅v = Ft⋅rt⋅ωk = Ft⋅vk(1-Sn) = Zk⋅f⋅vk(1-Sn)
gdzie Ft - siła oporu toczenia koła
Bilans mocy
Nk = Na+NS+Nt
Sprawność
gdzie:
- sprawność siłowa,
- sprawność kinematyczna
Ponieważ
to sprawność koła
siłowy współczynnik sprawności koła zależny od stosunku momentów
kinematyczny współczynnik sprawności zależny od poślizgu
zatem można zapisać, że
Moc tracona na kole napędzanym
3.7.4. Koło hamowane
Układ równań w przypadku pojawienia się momentu hamującego koło jest następujący:
∑Fz = 0 czyli GK - ZK = 0
∑Fx = 0 czyli -Xk + Fa + Fbk = 0
Σ MA = 0 czyli
Z równań równowagi sił wyznacza się
Zk=Gk
Fa = Xk - Fbk
gdzie Fbk=mk⋅a - ponieważ zakłada się, że opóźnienie hamowania jest stałe
Z równania momentów względem p. A wyznacza się reakcję wzdłużną
Iloczyn Zk⋅e=Mt zatem można napisać
gdzie
- siła hamująca
Siła oddziaływania samochodu na koło:
Xk - to siła styczna między oponą a jezdnią. Zawsze musi być spełniony warunek, że
Xk ≤ Zk⋅μ
zatem
Układ równań w ruchu jednostajnym
Gk - Zk = 0
Fa - Xk = 0
Mh - Xk⋅rd + Zk⋅e = 0
Skąd
Zk = Gk
Fa = Xk =Fh + Gk⋅f
Sprawność hamulców koła w ruchu jednostajnym
gdzie: Na - moc odbierana przez koło od pojazdu,
Nh - moc pochłaniana przez hamulce
bo v = rt⋅ωk
Bilans mocy koła
1
56
1
2
3
Błąd! Nieprawidłowy obiekt osadzony.
Wyszukiwarka
Podobne podstrony:
ZARZ SRODOWISKIEM wyklad 1a
Audyt personalny 1a stud
1a wz2id 18643
II, rzis analityczny 1A Likpol
L1-1a, Ratownictwo Medyczne, Materiały ze studiów, Medycyna Ratunkowa
praca-magisterska-7092, 1a, prace magisterskie Politechnika Krakowska im. Tadeusza Kościuszki
praca-magisterska-7091, 1a, prace magisterskie Politechnika Krakowska im. Tadeusza Kościuszki
2 1a
misztal kolos trp szynowy
BLOK 1a 2 3 id 90304 Nieznany
04 1a LICZNIKI XBK KATALOGid 4946
Cwiczenia z ochrony gleby cz 1a Nieznany
8 6 1a
praca-magisterska-6927, 1a, prace magisterskie Politechnika Krakowska im. Tadeusza Kościuszki
praca-magisterska-6888, 1a, prace magisterskie Politechnika Krakowska im. Tadeusza Kościuszki
więcej podobnych podstron