POLITECHNIKA ŚWIĘTOKRZYSKA w KIELCACH |
||
LABORATORIUM MASZYN SPECJALNYCH |
||
ĆWICZENIE NR:
|
Badanie silnika skokowego |
Zespół: Daniel Dobrowolski Piotr Dukat Paweł Chęciński Andrzej Chojnacki |
Data wykonania: 06.12.1999 |
Data oddania: 11.01.1999 |
Ocena: |
1.Wstęp:
Silniki skokowe, są to elektromechaniczne przetwornik energii służące do przetwarzania sygnału elektrycznego( ciąg impulsów sterujących) w dyskretne(kątowe lub liniowe) przemieszczenie mechaniczne.
Pod względem budowy silniki skokowe podobne są do zwykłego silnika synchronicznego. Wirnik może być wykonany jako bierny( stal elektrotechniczna),lub czynny( magnes trwały).
Zasada działania silnika opiera się na skokowej zmianie strumienia magnetycznego pod wpływem zmieniających się impulsów sterujących zasilających stojan silnika. Jeżeli zasilimy uzwojenie 1 napięciem, to wytworzy strumień Φ1. Wirnik ustawi się wówczas tak , aby przewodność magnetyczna na drodze strumienia była największa. Strumień stojana Φs=Φ1. Jeżeli dodatkowo zasilimy mu uzwojenie 2, to strumień wypadkowy Φs, będzie składową Φ1,oraz Φ2. Następnie, jeżeli zdejmiemy napięcie z uzwojenia 1, wtedy Φs=Φ2. Cykle powtarzają się. Przy tak uzwojonym i zasilonym silniku będzie 8 taktów. Widać, że skokowa zmiana położenia strumienia uwidacznia się, jako skokowa zmiana położenia wirnika.
Liczba taktów w silniku skokowym można obliczyć z zależności: k= m*n1*n2, gdzie:
m- liczba uzwojeń sterowania
n1=1, dla komutacji symetrycznej( cały czas zasilana jest taka sama liczba biegunów)
n1=2, dla komutacji niesymetrycznej
n2=1, dla komutacji stałobiegunowej( napięcie sterujące jednego znaku)
n2=2, dla komutacji przemiennobiegunowej
Kąt obrotu wirnika wynosi:
Θ=360/k
dla silników wielobiegunowych(p>1):
Θ=360/(k*p)
2. Pomiary:
2.1. Rozkład impulsów sterujących, zasilających uzwojenia silnika skokowego:
- przy obrocie wirnika w prawą stronę:
przy obrocie wirnika w lewą stronę:
2.2. Pomiar częstotliwości rozruchowej silnika skokowego:
Najmniejsza częstotliwość fali prostokątnej sterującej, przy której silnik skokowy normalnie działa wynosi:
f=0.15Hz
2.3. Pomiar granicznej częstotliwości silnika skokowego:
Największa wartość częstotliwości, przy której silnik działa wynosi: f=700Hz
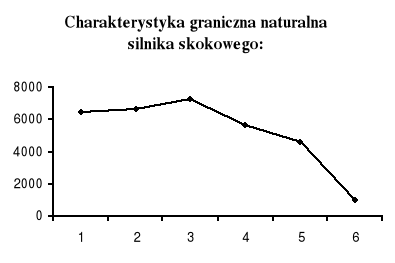
2.4. Wyznaczenie charakterystyki granicznej naturalnej silnika:
tabela pomiarowa:
Lp |
f |
F1 |
F2 |
ΔF |
M |
- |
Hz |
N |
N |
- |
N*cm |
1 |
100 |
2686 |
1704 |
982 |
6383 |
2 |
150 |
3037 |
1983 |
1054 |
6582 |
3 |
200 |
2882 |
1774 |
1108 |
7202 |
4 |
300 |
3042 |
2176 |
866 |
5629 |
5 |
400 |
3471 |
2770 |
701 |
4556,5 |
6 |
500 |
3219 |
3070 |
149 |
968,5 |
- wykres:
3. Wnioski:
Celem ćwiczenia było zapoznanie się z sposobem oraz warunkami pracy silnika skokowego.
W ćwiczeniu wyznaczyliśmy dwie charakterystyczne częstotliwości dla silnika skokowego: częstotliwość rozruchową oraz maksymalna częstotliwość pracy .
Wyznaczyliśmy również charakterystykę graniczną naturalną. Przebieg tej charakterystyki jest zgodny z założeniami teoretycznymi. Możemy stwierdzić że pomiędzy częstotliwością rozruchową a krzywą graniczną naturalną znajduje się obszar pracy przyspieszonej, w którym silnik nadąża za wystarczająco wolnymi zmianami częstotliwości. Powyżej charakterystyki granicznej silnik wypada z synchronizmu i zatrzymuje się.
Można jeszcze nadmienić, że są dwa podstawowe sposoby poprawy przebiegu charakterystyki naturalnej:
zastosowanie układu forsującego narastanie prądu w uzwojeniu:
sforsowanie napięcia zasilania na początku taktu komutacji.
Zabiegi tego typu pozwalają na zwiększenie zakresu pracy silnika skokowego.
A
B
C
D
A
B
C
D
R
C
L
Wyszukiwarka
Podobne podstrony:
Badanie silnika synchronicznego (2), Elektrotechnika, Rok 3, Maszyny elektryczne
Badanie silnika synchronicznego (3), Elektrotechnika, Rok 3, Maszyny elektryczne
Badanie silnika pierscieniowego, elektrotechnika
Badanie silnika skokowego, Badanie silnika skokowego, POLITECHNIKA RADOMSKA
Badanie silnika szeregowo-bocznikowego prądu stałego, Elektrotechnika, Rok 3, Maszyny elektryczne
Silnikkrok, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
silnik, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Badanie indukcyjnego silnika pierscieniowego v4, LABORATORIUM MASZYN ELEKTRYCNYCH
Badanie prądnicy synchronicznej trójfazowej(1), Elektrotechnika, Rok 3, Maszyny elektryczne
Silnik uniwesalny, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Badanie silnika klatkowego, Maszyny elektryczne
Badanie silnika jednofazowego, 5 semestr, Maszyny elektryczne
Badanie prądnicy synchronicznej trójfazowej, Elektrotechnika, Rok 3, Maszyny elektryczne
silnik obcowzbudnym, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Laboratorium, 09.Ba
silnik2faz, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Silnik wykonawczy dwufazowy, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Badanie indukcyjnego silnika pierścieniowego v2, LABORATORIUM MASZYN ELEKTRYCNYCH
więcej podobnych podstron