Zadanie proste kinematyki:
W podstawie manipulatora wiążemy układ współrzędnych, tak że nasz początkowy układ współrzędnych ma postać:
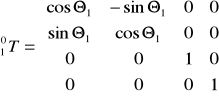
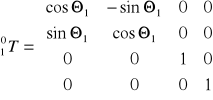
Pierwsze przekształcenie układu 0 w układ 1 polega na obrocie wokół osi Z o kąt Ө1:
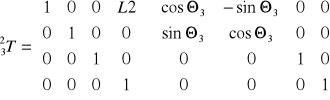
Drugie przekształcenie układu 1 w układ 2 ma postać:

Trzecie przekształcenie:
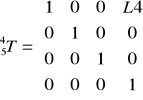
Przekształcenie do układu czwartego:
Układ ostatni ma postać:
A zatem:
![]()
i |
αi-1 |
ai-1 |
di-1 |
Өi-1 |
1 |
0 |
0 |
0 |
90° |
2 |
90° |
0 |
200 |
-45° |
3 |
0 |
150 |
0 |
-60° |
4 |
0 |
100 |
0 |
0 |
5 |
0 |
50 |
0 |
0 |
x0
y0
z0
Wyszukiwarka
Podobne podstrony:
Zadanie proste kinematyki manipulatora, ZiIP, II Rok ZIP, Metrologia, exam z metry
MSI sciaga z konspekow, Studia, Studia sem IV, Uczelnia Sem IV, MSI
Re, Studia, Studia sem IV, Uczelnia Sem IV, WM
SCIĄGA~2, Politechnika Lubelska, Studia, Studia, sem IV
egzam - 3 zadania, Studia, samestr IV, PKM2, Podstawy konstrukcji maszyn II, Egzaminy
Ciecz newtonowska, Studia, Studia sem IV, Uczelnia Sem IV, SIWM
kolos msi, Studia, Studia sem IV, Uczelnia Sem IV, MSI
protokół Pomiary podstawowych wielkości w polu elektromagnetycznym, Politechnika Lubelska, Studia, S
eln1 - Półprzewodniki, Politechnika Lubelska, Studia, Studia, sem IV
EGZAMIN 1, Politechnika Lubelska, Studia, Studia, sem IV, teoria pola, Teoria Pola
Elektroniczne układy zapłonowe, Studia, Studia sem IV, Uczelnia Sem IV, MSIL
11 Zadania kontrolne geometria analityczna(2), Studia PK WIS, Sem 3 IS, Geometria analityczna
protokół materiałoznawstwo cw4, Politechnika Lubelska, Studia, Studia, sem IV
Linia napowietrzna, Politechnika Lubelska, Studia, Studia, sem IV
egzam odpowiedzi, Politechnika Lubelska, Studia, Studia, sem IV, teoria pola, Teoria Pola
Kolokwium wykładowe kinematyka, Studia, Sem 3, III, III Semestr, Mechanika II
więcej podobnych podstron