Zadanie proste kinematyki manipulatora
Niech
Ai = 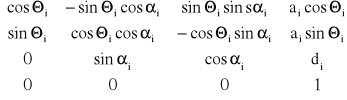
Obieramy zmienne kinematyczne, gdy para kinematyczna jest :
obrotowa - zmienną kinematyczną jest i
przesuwna - zmienną kinematyczną jest i
Przykładowo ( dla manipulatora stanfordzkiego )
I |
i |
di |
ai |
i |
1 |
var |
d1 |
a1 |
1 |
2 |
var |
d2 |
a2 |
2 |
3 |
3 |
var |
a3 |
3 |
4 |
var |
d4 |
a4 |
4 |
5 |
var |
d5 |
a5 |
5 |
6 |
var |
d6 |
a6 |
6 |
Macierze dla manipulatora stanfordzkiego
A1(1), A2(2), A3(d3), A4(4), A5(5), A6(6)
Dla par kinematycznych klasy piątej
qi = i dla pary obrotowej
qi = di dla pary translacyjnej
Czyli
![]()
dla N stopni swobody manipulatora.
Przykładowa macierz wyrażająca pozycję i orientację drugiego układu względem bazowego :
T2 = A1(q1) A2(q2)
Znając q(t0) można określić pozycję i orientację manipulatora w chwili t0.
Gdy dany jest wektor q na jego podstawie znajdujemy wektor położenia manipulatora
q [ xCS yCS zCS a b c ]T
gdzie
xCS
yCS współrzędne początku lokalnego układu współrzędnych ( w układzie globalnym )
zCS
a
b kosinusy kierunkowe, kąty Eulera, dwa kąty i oś
c
I A1
A2
T
A1 A2 A3 AN-1 AN
I TN
Wyszukiwarka
Podobne podstrony:
SPRAWOZDANIE NR 1, ZiIP, II Rok ZIP, Metrologia, Sprawozdanie nr 1
metrologia - błędy kształtu, ZiIP, II Rok ZIP, Metrologia, metrologia, Sprawozdania
str tytuł-SKJ, ZiIP, II Rok ZIP, Metrologia, SKJ-Statystyczna Kontrola Jakości, Sprawozdanie
Stożki, ZiIP, II Rok ZIP, Metrologia
częstotliwość, ZiIP, II Rok ZIP, Metrologia
SKJ wnioski, ZiIP, II Rok ZIP, Metrologia, SKJ-Statystyczna Kontrola Jakości, Sprawozdanie
sprawozdanie nr 3, ZiIP, II Rok ZIP, Metrologia, metrologia, Sprawozdanie nr 3
Kopia LABORATORIUM-nasze, ZiIP, II Rok ZIP, Metrologia, Charkterystyka statyczna przetworników (lab1
sprawozdanie nr 5, ZiIP, II Rok ZIP, Metrologia, Sprawozdanie nr 5
LABORATORIUM, ZiIP, II Rok ZIP, Metrologia, Charkterystyka statyczna przetworników (lab1), Sprawozda
Pomiary błędów kształtu, ZiIP, II Rok ZIP, Metrologia
LABORATORIUM-nasze v2, ZiIP, II Rok ZIP, Metrologia, Charkterystyka statyczna przetworników (lab1),
Politechnika Poznańska, ZiIP, II Rok ZIP, Metrologia, metrologia, Sprawozdania, Statystyczna kontrol
POPRAWIONE 01 - Pomiary współrzędnościowe, ZiIP, II Rok ZIP, Metrologia, metrologia, Sprawozdania
Pomiary stożków, ZiIP, II Rok ZIP, Metrologia
SKJ, ZiIP, II Rok ZIP, Metrologia, SKJ-Statystyczna Kontrola Jakości, Sprawozdanie
Błędy pomiarów pośrednich, ZiIP, II Rok ZIP, Metrologia, metrologia, Sprawozdania
metrologia -r-a, ZiIP, II Rok ZIP, Metrologia, metrologia, Sprawozdania
błędy pośrednie, ZiIP, II Rok ZIP, Metrologia, metrologia, Sprawozdania
więcej podobnych podstron