1. Definicja układu regulacji automatycznej - schemat blokowy, wyjaśnienie podstawowych pojęć (rysunek).
Schematy blokowe - układy sterowania mogą składać się z pewnej liczby podzespołów. Schemat blokowy układu jest graficznym opisem funkcji wykonywanych przez każdy element i przepływające sygnału.
a) blok funkcjonalny
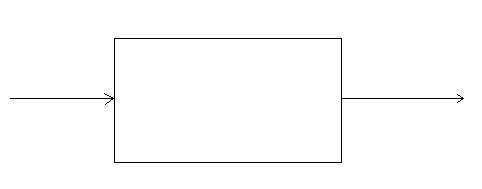
x1(s) x2(s)
G(s)
x2(s) = G(s)x1(s)
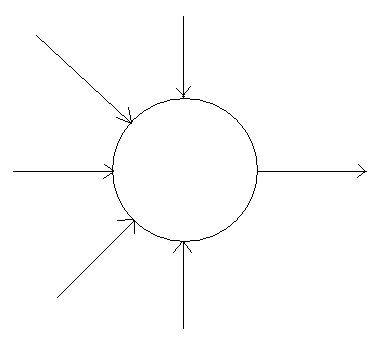
b) węzeł sumacyjny
x1(s)
x2(s)
+
-
x3(s) + x0(s)
-
x4(s)
+
x5(s)
c) węzeł zaczepowy
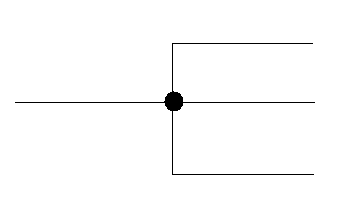
x(s)
2. Podział układu regulacji ze względu na sposób opisu matematycznego.
- ciągłe, dyskretne, logiczne
- liniowe, nieliniowe
- stacjonarne, niestacjonarne
- o parametrach skupionych i rozłożonych
3. Podział układu regulacji ze względu na zadania układu.
- układy stabilizacji (ω ≠ const.)
- układy śledzące (ω = ω(x))
- układy optymalne
- układy przełączające
4. Transmitancja.
Transmitancja jest to stosunek obrazu funkcji wyjściowej do obrazu funkcji wejściowej.
G(s) = y(s) / a(s)
f(t) F(s) = L[f(t)] = ʃ0∞ f(t)e-stdt
s = a + jiω
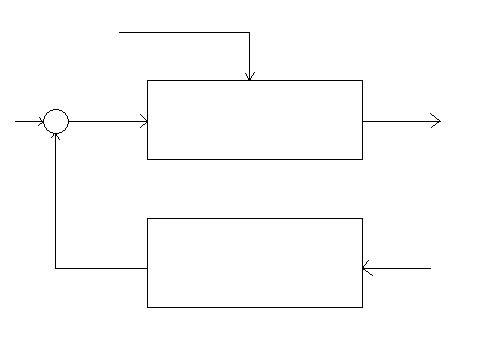
5. Układ sterowania zamknięty i otwarty.
a) otwarty układ sterowania
zi
z obiekt y
sterowania
+ -
u
urządzenie
sterujące w
b) zamknięty układ sterowania
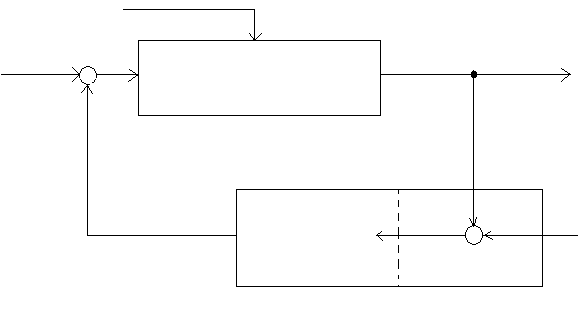
zi
z obiekt sterowania y
+ -
u
-
e + w
regulator
6. Metody opisu właściwości dynamicznych.
równanie różniczkowe
równanie różnicowe
przestrzeń stanu
transmitancja
metody graficzne
- skokowe
- impulsowe
- sinusoidalne
* charakterystyka amplitudowo-fazowa
* charakterystyka amplitudowa i fazowa we współrzędnych logarytmicznychalgebra Boole'a
7. Przekształcenie Laplace'a.
a) δ(t) 1
b) skok jednostkowy 1(t) 1/s
c) tn-1 / (n-1)! (n=1,2,3,…) 1/sn
d) tn-1e-at/(n-1)! 1/(s+a)n
e) sinωt ω/s2+ω2
f) cosωt s/s2+ω2
g) e-atsinωt ω/(s+a)2+ω2
h) e-atcosωt s+a/(s+a)2+ω2
8. Przekształcenia formy sygnału.
9. Ogólne równanie ruchu.
dopływ - odpływ = akumulacja
dmy/dtm + a1(dm-1y/dtm-1) + … + am-1*dy/dt + amy = b0(dry/dtr) + b1(dr-1u/dtr-1) + … + br-1(dy/dt) + bru
10. Człon statyczny 0. rzędu (proporcjonalny) i całkujący (równanie, współczynnik wzmocnienia, transmitancja, wykres odpowiedzi skokowej, przykład)
y = b0u - równanie
k = b0 - współczynnik wzmocnienia
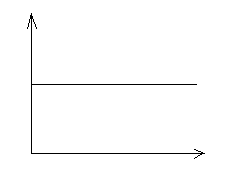
y(t)
k
G(s) = k
t
m n
Δy 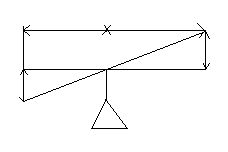
Δu
k = n/m
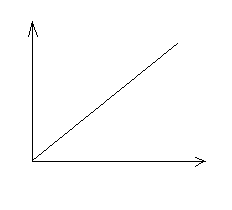
y(t)
G(s) = k/sT1
t
11. Człon statyczny pierwszego rzędu („inercyjny”) i opóźniający
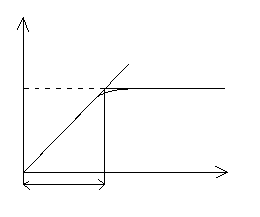
y(t)
G(s) = k/Ts+1
k G(s) = y(s)/M(s) = b0/s+a1 = (b0/a1)/(1/a1s+1)
= k/(Ts+1)
np. Zbiornik ze swobodnym przepływem
T t
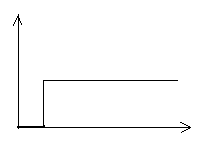
y(t)
G(s) = k*e-sT0
równanie nieliniowe : y(t)={1 t≥τ ; 0 t<τ
k G(s) = e-τs
np. rurociąg
T0 t
12. Człon rzeczywisty i idealny (…)
C
dy/dt +e1y = b0 du/dt
k = 0
y G(s) = TbS/Ts+1
r
x
y
Δ0 y = b0 du/dt + 0n
k = 0
G(s) = TdS dla Td = b0
y(t) = δ(t)
t
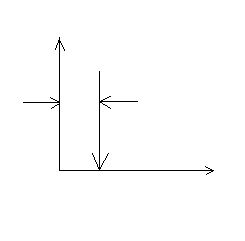
13. Człon 2. rzędu oscylacyjny (bez równania przebiegu odpowiedzi - analiza przebiegów), człon opóźniający.
P1x P2x
d
d2y/dt2 + a1*(dy/dt) + a2y = b0u
G(s) = 1/T2S2+2εTs+1
y
Δ<0 wpada w drganie
y
l
Wyszukiwarka
Podobne podstrony:
Automatyka i robotyka Zad 2, Inżynieria biomedyczna UTP, Automatyka
Automatyka i robotyka Zad 1, Inżynieria biomedyczna UTP, Automatyka
Automatyka i robotyka Zad 2, Inżynieria biomedyczna UTP, Automatyka
Pytania na kolokwium- wykład, Inżynieria biomedyczna UTP, Automatyka
Formularz do referatu, Inżynieria biomedyczna UTP, PiEAiB
fizyka koło teoria, INŻYNIERIA BIOMEDYCZNA UTP, I ROK, FIZYKA, LABOLATORIUM
Protokol Cwiczenie 5, Inżynieria biomedyczna UTP, Elektrotechnika, laboratorium
sprawozdanie ćw 3, Inżynieria biomedyczna UTP, Chemia
metrologia- koło, Inżynieria biomedyczna UTP, metrologia
Protokol Cwiczenie 2, Inżynieria biomedyczna UTP, Elektrotechnika, laboratorium
opracowane pytania na koło, Inżynieria biomedyczna UTP, socjologia
Zaliczenie TEST ODPOWIEDZI, Inżynieria biomedyczna UTP Bydgoszcz, Elektroniczna aparatura medyczna,
warunki-i-zasady-przygotowania-prac-dyplomowych, inzynieria biomedyczna eti pg
INŻYNIERIA BIOMEDYCZNA
biosensory test, Studia- Politechnika Wrocławska Inżynieria Biomedyczna, Semestr IV
Sprawozdanie Ćw 5a, inzynieria biomedyczna eti pg, sensory
test z odpowiedziami, Pytania testowe proponowane przez trzeci rok Inżynierii Biomedycznej 2000/2001
FILOZOFIA-KOŁO.x, Zarządzanie i inżynieria produkcji UTP, Semestr I, Filozofia
Alkacymetria, Inżynieria biomedyczna, Chemia laboratorium, Wejsciowki na technologie chemiczna
więcej podobnych podstron