1 Ruch liniowy i obrotowy. Prędkość liniowa i kątowa. Przyspieszenie liniowe i kątowe oraz dośrodkowe.
V=ds./dt
A=dv/dt=d2s/dt2
V chwilowe= lim(Δt->0) ΔV/Δt
A chwilowe= lim(Δt->0) Δa/Δt
Ruch obrotowy: kąt ϕ - droga kątowa, ω - prędkość, ε - przyspieszenie
ω=dϕ/dt
ε=dω/dt=d2ϕ/dt2
ω=ωo+εt
ϕ=ωot+εt2/2
v=ω×r v=2πr/T f=1/T (v-prędkość liniowa, f- częstotliwość, T-okres)
s=r*ϕ (s-długość łuku, r-promień, ϕ-kąt w RAD)
Przyspieszenie dośrodkowe: a=v2/R= -ω2r
2. Zasady dynamiki Newtona dla punku materialnego. Pojęcie siły i masy bezwładnej. Pęd i prawo zachowania pędu. Relacja między pędem a siłą.
I- zasada bezwładności ∑F=0 =>V=const
BEZWŁADNOŚĆ (INERCJA): własność polegająca na tym, że ciało zachowuje swój stan spoczynku albo ruchu jednostajnego po linii prostej gdy nie działają na niego inne ciała
SIŁA: wielkość fizyczna wektorowa będąca miarą oddziaływań prowadzących do zmiany prędkości lub kształtu ciała. Siłą może oddziaływać na ciało w wyniku bezpośredniego kontaktu lub za pośrednictwem pól pochodzących od innego ciała
PĘD punktu materialnego na który nie działa żadna siła =const
II- F≠0 => F=m*a
F=m*dv/dt
P=mv
PRAWO PĘDU: przyrost pędu ciała= wywartemu na to ciało popędowi
∫(t1,t0)Fdt=∫(p1,p0)dp=p1-p0 (∫(t0,t1)Fdt - popęd)
PRAWO ZACHOWANIA PĘDU: sumaryczny pęd punktów materialnych (ciał) układu odosobnionego =const F=0 =>dp/dt=0
III Fab= -Fba (akcja - reakcja)
3. Prawo grawitacji Newtona. Natężenie i potencjał pola grawitacyjnego. Prędkości kosmiczne.
F=G*Mm/r2*r^ (r^ - wektor jednostkowy)
ρ=F/m (ρ- natężenie pola grawitacyjnego) - zdolność pola do przyciągania wytwarzania siły i energii potencjalnej)
ρ=G*M/r2*r^
W=Fs
dW=F*ds. (s- droga)
dW=F*dr=G*Mm/r2*r^
W=mGm*(1/Ra- !/Rb) (W- praca w polu grawitacyjnym Rb-Ra- przebyta droga)
V=U/m (U-energia potencjalna, V- potencjał grawitacyjny)
dV/dr= -GM/r (w r=∞ V=0)
F= -dU/dr
PRAWO GARWITACYJNE (POWSZECHNEGO CIĄŻENIA): dwie masy przyciągają się siła proporcjonalną do iloczynu ich mas m1 i m2 a odwrotnie proporcjonalnie do kwadratu ich odległości F=G*(m1m2)/r2
Ep=mgh
Ek=(mV2)/2
I prędkość kosmiczna: najmniejsza prędkość jaką trzeba nadać ciału równolegle do powierzchni ziemi by stało się ono sztucznym satelitą V1=√(GM/Rz+H)
I prędkość kosmiczna: ... by poleciało do ∞ V2=√(2GM/R) V2=√2*V1
4. Zasady dynamiki Newtona dla ruchu obrotowego brył materialnych. Moment bezwładności brył materialnych I, moment siły M i moment pędu L. Prawo zachowania momentu pędu.
dm=ρdV = ρAdx (ρ- gęstość, A- przekrój)
I=∫(0,l)x2dm=∫(0,l)x2ρAdx (I- moment bezwładności punktu)
I=∑Ii (moment bezwładności układu punktów (bryły))
I=mr2=∑mi*ri2
TWIERDZENIE STEINERA (O OSIACH RÓWNOLEGŁYCH): I=ML2+Io
II ZASADA DYNAMIKI: dla ruchu swobodnego układu punktów materialnych lub swobodnego ciała sztywnego pochodna krętu (momentu pędu) układu punktów (ciała sztywnego) =momentowi układu sił działających liczonemu względem tego samego punktu.
MOMENT SIŁY M: M=r×F
M=Iε (I- moment bezwładności)
MOMENT PĘDU (KRĘT): L=r×p
dl/dt=M
L=Iω (I- moment bezwładności)
ZASADA ZACHOWANIA MOMENTU PĘDU: jeżeli moment siły działającej na punkt materialny liczony względem dowolnego punktu =0 to moment pędu (kręt) punktu materialnego względem tego punktu =const
5. Energia kinetyczna ruchu postępowego punktu materialnego i ruchu obrotowego bryły sztywnej: praca i moc w ruchach postępowym i obrotowym.
ENERGIA KINETYCZNA: energia punktu znajdującego się w ruchu
Ek=mV2/2
Energia kinetyczna ruchu postępowego ciała sztywnego =∑ energii kinetycznych jego punktów
Ek punktu materialnego poruszającego się po okręgu; Ek=ω2mr2/2
Energia układu punktów Ek=(ω2∑mi*ri2)/2=(ω2I)/2 (I- moment bezwładności)
W=Fs=Fs*cosα
W=∫(1,2)Fds
P=dW/dt
PRACA W RUCHU OBROTOWYM: dW=Fds
dW=FcosΘds.
dW=FrdΘcosΘ=MdΘ (M- moment siły)
MOC W RUCHU OBROTOWYM: p=dW/dt=MdΘ\dt=Mω
6. Przepływ płynów. Prawo Bernoulliego. Działanie prawa Bernoulliego w przyrodzie i jego zastosowanie techniczne.
PRAWO BERNOULLIEGO: przy przepływie cieczy przez rurę o różnych przekrojach suma wysokości wzniesienia, wysokości ciśnienia i prędkości =const
h+po/q+ V2/g=const
ρV2/2+gh-p=const (ρV2/2- ciśnienie dynamiczne, gh- statyczne)
LEPKOŚĆ: F=ηA*V/h (A- powierzchnia, V- prędkość, h- wysokość cieczy, η- współczynnik lepkości cieczy)
PRZEPŁYW CIECZY -jej ukierunkowany ruch pod wpływem sił linii prądu: linie których kierunki pokrywają się w każdym punkcie z kierunkami prędkości cieczy (jeśli linie prądu nie zmieniają się w czasie to przepływ= stacjonarny) Struga: część strumienia ograniczona liniami prądu
PRZEPŁYW LAMINARNY: strugi nie mieszają się w kierunku poprzecznym
PRZEPŁYW TURBULENTNY: wiry (strugi nie istnieją)
![]()
PRAWO CIĄGŁOŚCI: S1V1=S2V2 (s- powierzchnia, V- prędkość)
7. Proste drgania harmoniczne. Równanie różniczkowe prostych drgań harmonicznych i jego rozwiązanie. Składanie drgań równoległych - dudnienie. Składanie drgań prostopadłych- krzywe Lissajous.
x=e^(λt)
RUCH HARMONICZNY: ruch rzutu punktu materialnego przemieszczającego się ruchem jednostajnym po okręgu, na średnicę tego okręgu.
x=A*cos(ωt+ϕ) (A- promień koła - amplituda, ω- prędkość kątowa, t- faza ruchu drgającego, ϕ- kąt promienia z osią x - przesunięcie fazowe)
d2x/dt2+k/m=0 (k/m=ωo2 => λ2+ωo2=0 => λ=e^(-iωot)
WZÓR EULERA: e^(iϕ)=cosϕ+i*sinϕ
ωo=2πf
x=A*cosωt
Ep drgań harmonicznych= (kx2)/2
SKŁADANIE DRGAŃ RÓWNOLEGŁYCH: x1=Acosωt, x2=Acos(ω+Δω)t (ω+Δω - małą różnica) => drgania modulowane => DUDNIENIA (okresowe zwiększanie się oraz zmniejszanie amplitudy drgania wypadkowego będącego superpozycją dwóch drgań harmonicznych, których częstotliwości drań mało różnią się od siebie) (gdy amplitudy są=) => wychylenie wypadkowe ma 0 amplitudę
x=x1+x2= 2Acosωt*cos(Δω/2)t
SKŁADANIE DRGAŃ PROSTOPADŁYCH: x=Ax*cos(ωx)t, y=Ay*cos(ωyt+Φ) => gdy ωx=ωy=ω => x2/Ax2+y2/Ay2- ∂xy/AxAy*cosΦ=sin2Φ => dla Φ=π/2 ->elipsa, dla Φ=0 ->odcinek, gdy ωx≠ωy => krzywe Lissajous
ωx/ωy=m/n (m,n- całkowite) - zamknięta krzywa Lissajous
8. Drgania tłumione. Równanie różniczkowe drgań tłumionych i jego rozwiązanie. Tłumienia krytyczne i nadkrytyczne.
DRGANIA TŁUMIONE: drgania gasnące; w których amplituda nie jest stała, lecz maleje w czasie w skutek rozpraszania się energii układu drgającego.
d2x/dt2+2β*dx/dt+ωo2x=0
x=ae^(-βt)*cos(ωt+α) (β- stała zaniku, α- faza początkowa)
=>modulacja:
ω=√(ωo2-β2)
dla ωo>β => tłumienie podkrytyczne, dla ωo=β =>krytyczne (brak drgań), dla ωo<β => nadkrytyczne (brak drgań)- ruch pełzający
βT=Λ (Λ- logarytmiczny dekrement tłumienia)
Λ=ln(A(t)/A(t+T))
9. Drgania wymuszone. Rezonans
DRGANIA WYMUSZONE: drgania wywołane zewnętrznym źródłem energii o zmieniającym się w czasie natężeniu, działanie źródła nie powinno wpływać na parametry układu drgającego (np. drgania stroika, drgania głośnika)
X=Xorj+Xsnj (Xorj- równanie ogólne jednorodne, Xsnj- szczególne niejednorodne)
Gdy F=Fo*cosωt m*d2x/dt2= -k2*dx/dt-k1x+Fo*cosωt - równanie różniczkowe drgań wymuszonych
REZONANS: zjawisko narastania amplitud drgań harmonicznych w miarę gdy częstotliwość wymuszania zbliża się do jednej z częstotliwości drgań własnych układu drgającego.
Gdy stale pociągamy za sprężynę: nie ma tłumienia drgania (En doprowadzona z zewnątrz równoważy straty En na pokonanie tarcia w ruchu), masa m nie drga z częstotliwością własną tylko z częstotliwością naszej ręki, amplituda drgań zależy od częstotliwości siły wymuszającej
Ωrez=√(ωo2-2β2)
10. Ruch falowy. Równanie różniczkowe ruchu falowego. Prędkość rozchodzenia się fali.
Zjawisko falowe polega na rozchodzeniu się zaburzenia w ośrodku ciągłym.
ξ=Asin(kx-ωt) (ξ- wychylenie)
k-2π/λ
długość fali λ=x2-x1 - odległość punktów w tej samej fazie
ξ=Asin2π(x/λ -f/T) - równanie falowe (x/λ - f/T)=const
V=dx/dt=λ/T (V- prędkość fazowa lub rozchodzenia się fali)
X=Ae^(kx-ωt)
V=√(M/ρ) (M- współczynnik sprężystości, ρ- wsp. Bezwładności - gęstość ośrodka)
FALA POPRZECZNA W CIELE STAŁYM: V=√(G/ρ) (G- wsp sztywności)
FALA PODŁUŻNA...: V=√(E/ρ) (E- moduł Younga)
FALE STOJĄCE: nakładanie się fali przeciwbieżnych ξ1=Asin(kx-ωt), ξ2=Asin(Kx+ωt) =>ξ=ξ1+ξ2
11. Procesy termodynamiczne: politropowy, adiabatyczny, izotropowy. Wykładniki politropy, adiabaty. Praca w procesach termodynamicznych.
POLITROPOWY: zmiana T V i p (nie zmienia się ciepło właściwe układu)
C=dQ/dT (C właściwe=const)
DQ=dUt*dW
C-Cv=p*dU/dT
((C-Cv)*(pdV+Vdp))/R=pdV
R=Cp-Cv
(C-Cp)/(C-Cv)*pdV+Vdp=0
nM=(C-Cp)/(C-Cv) - WYKŁADNIK POLITROPY
RT/r*(V^n)=RT(V^(n-1))=const =>T(V^(-1))=const
C=IQ/dT=const
PRACA (gaz idealny)
DW=pdV
W=∫(V1,V2)(P1(V1^n))/(v^n)*dV=p1v1/(n-1)*(1-((v2/v1)^(n-1)))
W=∫(V1,V2)pdV
ADIABATYCZNY: (przemiana termodynamiczna podczas której układ jest stale izolowany adiabatyczne: brak wymiany ciepła z otoczeniem)
W odwracalnej przemianie adaibat entropia układu S=const, dla gazów doskonałych PA opisuje RÓWNANIE POISSONA: pV^x =const lub TV^(x-1) =const (x- wykładnik adiabaty)
dQ=dU+dW (dQ=0, dU=CvdT, dW=pdV)
p=RT/V
W=(p1V1)/(ℵ-1)[1-((V1/V2)^(ℵ-1))]
IZOTERMICZNY (T=const): zgodnie z prawem Boyle'a-Mariotte'a w przemianie ziot iloczyn pV=const (dla gazu doskonałego)
dW=pdV =>W=p1V1*ln(V1/V2)
Pv=nRT/V
W=∫(V1,V2)pdV=nRT*ln(V2/V1)
12. Gazy rzeczywiste. Równanie Van der Waalsa. Izotermy P(V). Punkt krytyczny
pV=RT - dla gazu doskonałego
RÓWNANIE vdWAALSA: (p+a/V2)(V-b)=RT - dla gazu rzeczywistego (a,b- stałe dla każdego gazu, a- miara siły oddziaływania między cząsteczkami, b- uwzględnia objętość cząsteczek gazu, R- stała gazowa)
GAZ RZECZYWISTY: cząsteczki oddziałują na siebie, mają określoną objętość (ich cała masa nie jest skupiona w jednym punkcie). Im mniejsza gęstość gazu rzeczyw. tym mniejsze odchylenia od gazu doskonałego
IZOTERMA (T=const):
![]()
W punkcie krytycznym:∂p/∂v=0 ∂2p/∂V2=0 => punkt przegięcia
13. Przemiany fazowe I i II rodzaju. Reguła faz Gibbsa F+P=C+2. Diagram fazowy p(T) (krzywe sublimacji, topnienia, parowania, punkt potrójny, punkt krytyczny)
PRZEMIANA FAZOWA: przejście substancji z jednej fazy do drugiej (np. gaz ->ciecz)
SUBLIMACJA: przejście ze stanu stałego bezpośrednio w gazowy
stan stały (temp. topnienia) st. ciekły (temp. wrzenia) st. gazowy
PUNKT POTRÓJNY: w nim przecinają się krzywe równowagi trzech faz (tylko hel go nie ma)
14. I zasada termodynamiki; En wewnętrzna. Energia wewn gazu idealnego. Praca związana ze zmianą objętości
EN WEWN GAZU =∑ En wszystkich cząsteczek
I ZASADA: w dowolnej przemianie termodynamicznej układu zamkniętego zmiana ΔU En wewn = ciepłu Q dostarczonemu do układu i pracy W wykonanej nad układem: ΔQ=ΔQ+ΔW
dW= -pSdl= -pdV (siła porusz tłok o -dl, S- powierzchnia tłoka, p- ciśnienie wywierane przez tłok)
15. II zasada termodynamiki. Entropia - definicja statyczna i dynamiczna, Trzy sformułowania II zasady: entropowa, Clausiusa i Kelwina. Cykl Carnota. Maksymalny współczynniki sprawności
budowa perpetum mobile II rodzaju jest niemożliwa
a) proces gdzie jedynym wynikiem jest zamiana ciepła z grzejnicy na równoważną pracę bez wprowadzania zmian w otoczeniu jest niemożliwy - Kelwina
b) proces gdzie przekazywana jest energia (ciepło) jednego ciała o niższej temperaturze do ciała o wyższej temperaturze bez wprowadzania zmian w otoczeniu jest niemożliwy - Clausiusa
c) ENTROPIA układu odosobnionego, w którym przebiegają procesy nieodwracalne może jedynie wzrastać
ENTROPIA (S) - termodynamiczna funkcja stanu ∫(A,B)dQ/T - funkcja niezależna od drogi przejścia od jednego punktu do drugiego. Zależy od współrzędnych punktów końcowego i początkowego
dQ=Tds - w procesach odwracalnych
dQ<Tds - w procesach nieodwracalnych
dQ>dQ/T - w każdym układzie entropia jest maxymalna a w izolowanym nie maleje
dS=dQ/T
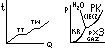
CYKL CARNOTA:
Wyidealizowana maszyna cieplna (odwracalne procesy) brak strat ciepła ( brak tarcia, doskonała izolacja cieplna) powraca do stanu wyjściowego, ciałem jest gaz doskonały
a) rozprężanie izotermiczne w temperaturze T1 (W1=RT1*ln(V1/V2))
b) rozprężanie adiabatyczne przy zmianie temperatury z T1 na T2 (W2=CV(T2-T1))
c) sprężenie izotermiczne w temp T2 (W3= -RT*ln(V2/V3))
d) sprężanie adiabatyczne przy zmianie temperatury z T12 na T1 (W4=CV(T1-T2))
WSPÓŁCZYNNIK SPRAWNOŚCI:
η=W/Q1=(T1-T2)/T1
LETNI
1. Pole elektryczne ładunku. Natężenie E i potencjał V pola elektrycznego. Relacja między E i V
TEORIA POLA FARADAY'A: ładunek punktowy zniekształca przestrzeń wokół siebie, wywołuje stan napięcia
F=k*Q1Q2/r2*r^
PRAWO COULOMBA: siły jakimi dwa ładunki punktowe oddziałują na siebie, są proporcjonalne do iloczynu wielkości tych ładunków i odwrotnie proporcjonalne do kwadratu ich odległości
E=F/q => E=1/4πωo*Q/r2*r^ (E- natężenie pola elektrostatycznego)
V=U/q (V-potencjał pola, U- energia potencjalna ładunku)
U=W=∫(0,∞)Fdr=Qq/4πεor
V=U/r=Q/4πεo*r
dU/dt= -E
E= -∇V (∇- gradient ∇=ex*∂/∂x+ey*∂/∂y+ez*∂/∂z)
POWIERZCHNIA EKWIPOTENCJALNA: V=const
2. Prawo Gaussa dla pola elektrycznego w próżni i w dielektryku. Strumień pola elektrycznego.
STRUMIEŃ POLA Φ: ogólna liczba linii pola, wiązka wektorów przechodzących przez pewną powierzchnię
Φ=CAcosϕ
Φ=EA=Q/εo (A=4πR2 - powierzchnia, E=Q/4πεoR2 - natężenie pola)
PRAWO GAUSA: ∫EdA=Q/εo gdy A_|_ linii pola=>Φ=max, gdy A|| linii pola=> Φ=min
3. Pojemność elektryczna. Definicja pojemności, Zastosowanie prawa Gaussa do wyliczania pojemności kondensatorów. Gęstość linii pola elektrycznego. Energia naładowanego kondensatora.
C=Q/V - POJEMNOŚĆ ELEKTRYCZNA to stosunek ładunku przewodnika do jego potencjału
W próżni pojemność kuli C=4πεoR a w dielektryku: C=4πεoεrR
KONDENSATOR: dwie płytki przewodnika oddzielone izolatorem
V=Eh (h- odległość płytek)
E=Q/εoA =>V=Qh/εoA
KONDENSATOR CYLINDRYCZNY: C=2πεol/ln(R/r)
En NAŁADOWANEGO KONDENSATORA: dU=dW=q/c*dq =>U=(cV2)/2
GĘSTOŚĆ En POLA: V=U/Ah=(εE2)/2
GĘSTOŚĆ LINII POLA ELEKTR: W(=U)=Cr2/2
UE=U/Ad=(Cr2/2)/Ad (d- odległość między okładkami)
VE=ωoE2=DE/2
POŁĄCZENIE SZEREGOWE:1/C=1/C1+1/C2+1/C3...
RÓWNOLEGŁE: C=C1+C2+C3
KONDENSATOR Z DIELEKTRYKIEM: ε=C/Co=0 (w próżni) >0 (inne) (ε- przenikalność elektryczna dielektryka (stała dielektryczna), stosunek pojemności z izolatorem do bez niego)
E=Eo/ε
4. Prawo Gaussa dla pola magnetycznego. Indukcja magnetyczna B. Przenikalność magnetyczna μ. Diamagnetyki, paramagnetyki, ferromagnetyki.
∫BdA=0 - PRAWO GAUSSA dla pola B
B=F/QVsinϕ (B- INDUKCJA MAGNETYCZNA, F- siła Lorentza (_|_ do V i _|_ do B, ϕ- kąt między Vi B, V- prędkość ładunku)
F=qV×B
B=F/QV
B=μoμH (H- natężenie pola magnetycznego, μo- przenikalność elektryczna próżni)
[Tesla=> 1T=jeśli jeden C ładunek elektryczny poruszający się _|_ do pola z prędkością 1m/s doznaje działania siły 1N]
PRZENIKALNOŚĆ MAGNETYCZNA μ: wielkość charakteryzująca zdolność ośrodka materialnego do zmian indukcji magnetycznej B pod wpływem zewnętrznego pola magnetycznego o natężeniu H
B=μH
DIAMAGNETYKI: μr nieco<1 (Zn, Pb, Cu, Ag, Cu, C, Hg - μr nie zależy od natężenia pola H) w polu ustawiają się _|_ do linii pola
PARAMAGNETYKI: μr nieco>1 (Mn, Cr, Al, Pt - μr też nie zależy) w polu ustawiają się || do linii pola, kula (ciecz, gaz) wciągana jest do miejsca o max natężeniu pola (w polu niejednorodnym)
FERROMAGNETYKI: μr dużo>1 (Fe, Co, Ni + stopy z Mn, Al, Cr, Si przenikalność elektryczna μr zależy od natężenia H) rozmagnesowywanie przebiega po innej krzywej niż namagnesowanie
5. Siła Lorentza. Działanie pola magnetycznego na przewodnik z prądem. Spektrometr masowy. Efekt Halla.
SIŁA LORENTZA: siła działająca na ładunek poruszający się w polu magnetycznym
F=q(V×B)
F=QVBsinϕ
SIŁA DZIAŁAJĄCA NA PRZEWODNIK Z PRĄDEM W POLU MAGNETYCZNYM:
dF=Idl×B
F=I∫(L)BsinΘdl (I- natężenie prądu)
SPEKTROMETR MASOWY: urządzenie do rozdzielania wiązek naładowanych (jonów) wg. wartości stosunku masy cząsteczki do jej ładunku za pomocą pól elektrycznych i magnetycznych. Rozdzielone cząstki są rejestrowane na błonie fotograficznej lub w licznikach cząstek. Do wykrywania różnych izotopów, oznaczania ich mas, do badania składu chemicznego i izotopowego substancji.
EFEKT HALLA: zmiana natężenia prądu przepływającego przez półprzewodnik związana z różnym polem magnetycznym
6. Pole magnetyczne ładunku w ruchu. Pole magnetyczne elementu przewodnika. Prawo Biota i Savarta.
PRAWO BIOTA I SAVARTA: Dany przewodnik w którym płynie prąd o natężeniu I jest podzielony na elementy dl, to każdy dl wnosi do indukcji B pola magnetycznego w określonym punkcie przyczynek dB określony: dB=μo/4π*I*(dl×r^)/r2 (r- promień wodzący łączący element dl z punktem gdzie wyznaczamy dB)
B=μo/4π*I*∫(dl×r^)/r2
7. Prawo Ampere'a. Pojęcie cyrkulacji wektora C=∫BdL. Pole magnetyczne przewodnika z prądem. Pole magnetyczne w solenoidzie.
PRAWO AMPERE'A: ∫BdL=μoI - wokół przewodnika z prądem powstaje pole magnetyczne (BdL- cyrkulacja wektora B)
UOGÓLNIONE PRAWO AMPERE'A: ∫BdL=μo(I+εo*dΦE/dt) (ΦE- strumień pola)
SOLENOID: cewka powietrzna, cylindryczna o uzwojeniu jedno lub wielowarstwowym
dB= -μo/2* NI/L*Rsinα/r2*dx (N- całkowita liczba zwojów, R- promień, α- kąt (r,oś), r- odległość od punktu gdzie wyznaczamy B do punktu dx, L- długość solenoidu)
POLE ŁADUNKU W RUCHU: B=μoq/4π*∫(dV×r^)/r2
8. Prąd przesunięcia. Pole magnetyczne prądu przesunięcia. Rola prądu przesunięcia w równaniach Maxwella
PRĄD PRZESUNIĘCIA: prąd związany ze zmianą strumienia pola elektrycznego. Występuje w kondensatorze znajdującym się w obwodzie prądu zmiennego, Przedłużenie prądu przewodzenia wpływającego do kondensatora i jest mu równy, jest związany ze zmianą natężenia pola elektrycznego
I=dQ/dt
dΦp/dt-Ip=Adp/dt
Ip=dΦp/dt
POLE MAGN PRĄDU PRZESUNIĘCIA: ID=ε*dΦE\dt
D=σE (D- gęstość prądu)
9. Prawo Faraday'a. Indukcja elektromagnetyczna. Prądy wirowe.
PRAWO FARADAY'A: siła SEM indukcji ε powstająca w obwodzie elektrycznym pod wpływem zmiennego pola magnetycznego jest proporcjonalna do szybkości zmian strumienia indukcji magnetycznej Φ przenikającej dowolną powierzchnię ograniczoną tym obszarem
ε= -dΦB/dt (- bo REGUŁA LENZA (PRZEKORY): prąd elektryczny jaki zostaje wygenerowany przy zmianie pola przeszkadza tym zmianom)
ε=∫EdL
SEM indukcji =En jaką nabywają elektrony na odcinku L obliczona na jednostkę ładunku (ma wymiar napięcia) ε=L(V×B)
PRĄDY WIROWE (FOUCAULTA): prądy powstałe w skutek indukcji elektromagnetycznej w masywnych przewodnikach poruszających się w polu magnetycznym, hamują ruch ciała (reg. Lenza)
10. Indukcyjność obwodu L. Indukcja własna i wzajemna. Indukcyjność obwodu i SEM wywołana zmianami prądu w tym obwodzie. Gęstość energii pola magnetycznego. Energia pola B w obwodzie i indukcyjności L.
INDUJCJA WZAJEMNA: ΦB=LI (L- indukcyjność, współczynnik proporcjonalności zależny od wzajemnego położenia cewek oraz od przenikalności magnetycznej μ ośrodka)
![]()
[1H=przy zmianie natężenia prądu w jednym obwodzie o 1A/s w drugim obwodzie indukuje się SEM 1V]
L=μoμrN1N2S/L (N1,N2- liczby zwojów, S- przekrój (taki sam))
INDUKCJA WŁASNA (SAMOINDUKCJA): powstaje SEM w uzwojeniach cewki przy zmianie prądu w cewce
L=μoμrN2S/L
11. Prąd zmienny. Prawa Kirchhoffa w obwodzie RLC. Impedancja. Przesunięcie fazowe między napięciem i prądem w obwodzie RLC. Moc prądu zmiennego.
I PRAWO KIRCHHOFFA: suma natężeń prądów spotykających się w wiązce=0, ∑ przypływających = ∑ odpływających
V=VR+VC+VL (VR=IR, VL =L*dI/dt, VC=Q/C)
V=LI2/2
II PRAWO: w dowolnej pętli zamkniętej stanowiącej część sieci elektrycznej suma algebraiczna sił SEM zawartych w pętli=∑ iloczynów natężeń prądu i oporów poszczególnych pętli
PRĄD ZMIENNY: SEM zmieniająca się sinusoidalnie, prąd sinusoidalnie zmienny w funkcji czasu zmienia się zwrot i natężenie
MOC: P=UskIsk*cosϕ (sk- skuteczne, cosϕ- współczynnik mocy)
IMPEDANCJA: całkowity opór jaki stawia obwód prądowi zmiennemu
Dla R: I=Io*cosωt
UR=IR=IoRcosωt=XRIo*cosωt
dla L: UL=ωoIo*cos(ωt+π/2)
dla C: UC=Io*cos(ωt-π/2)
12. Obwód RLC. Elektromagnetyczne drgania tłumione.
DRGANIA TŁUMIONE w RLC: VR+VL+VC=0
d/dt*(IR+L*dI/dt +Q/C=0) =>R*dI/dt+L*d2I/dt2+1/C*I=0
d2I/dt2+R/L*dx/dt+ωo2x=0 => x=Ae^(-βt)cos(ωt+α), ω=√(ωo2-β)
I=Ioe^(-βt)cos(ωt+α)
β=R/2L
ωo=1/√(LC)
dla R=0 ωo=1/√(LC)=2πf=2π*1/T =>T=2π√(LC)
NARASTANIE: J=Ke^(-R/L*t) t=0, I=Io =>KoIo I=Ioe^(-R/L*t)
ZANIK: I=Ioe^(-t/T) T=L/R
13. Równania Maxwella w postaci ∫ i różniczkowej. Ich wzajemna relacja. Twierdzenie Gaussa-Ostrogradskiego i twierdzenie Stokesa
a) ∫EdL= -dΦB/dt
b) ∫BdL=μo(I+ωo*ΦE/dt)
c) ∫EdA=Q/ωo
d) ∫BdA=0
a) ∇×E= -∂B/∂t
b) ∇×B=μo(j+εo*∂E/∂t)
c) ∇×E=q/ωo
d) ∇×B=0
TW GAUSSA-OSTROGRADSKIEGO: strumień wektora N wypływającego z powierzchni zamkniętej A=∫ z dywergencji wektora po obwodzie V ograniczonym przez tę powierzchnię
∫WdA*divW≡∇×W
∇=dWx/dx+dWy/dy+dWz/dz
∫(A)WdA=∫(V)∇WdV
TWIERDZENIE STOKESA: ∫WdL=∫∇×WdA
dW≅∇×W
14. Fale elektromagnetyczne. Odmienność fal elektromagnetycznych od fal w ośrodkach sprężystych. En fale elektromagnet, Światło jako fala elektromagnetyczna
∂2E/∂z2-1/C2*∂2E/∂t2=0
∂2B/∂z2-1/C2*∂2B/∂t2=0
E=[E,0,0]
B=[0,B,0]
∇×E=ey*∂E/∂z
∇×B= -ex*∂B/∂z
1/C2=μoεo => C=1/√(μoεo) (C- prędkość światła)
WSPÓŁCZYNNIK ZAŁAMANIA: n=C/V=√(με)
gdy μ≈1 =>√ε
Wyszukiwarka
Podobne podstrony:
ŚCIAGAfiz, ATH, Fizyka, Ściągi
fiza sciaga - Roger(1), fizyka, ściągi
sciaga fizyka 2, sciagi, fizyka, sciagi mix
sciaga2, BUDOWNICTWO, Fizyka, ściągi
fizyka dział 1 - sciaga DYNAMIKA, ۩۩۩ Edukacja ۩۩۩, Fizyka, FIZYKA(sciagi)
Gotowa ściaga na obsługę, Ściągi, Fizyka
sciaga teoria II, Budownictwo PG, Semestr 1, Fizyka, Ściągi, teoria na koła
fizyka ściąga praqwa keplera2, Ściągi, Ściągi I LO
sciaga fizyka(1), fizyka, ściągi
fizyka - sciagi z kinetyki i jadrowki, Budownictwo Studia, Rok 1, Fizyka
badania fizykalne ściągi
spr z fizy nr 2 FALE itp, ŚCIĄGI, FIZYKA(sciagi)
Fizyka sciagi z kinetyki i jadrowki
fiza-Zjawiska optyczne, ŚCIĄGI, FIZYKA(sciagi)
1(1), fizyka, ściągi
fizyka ściągi, Fizyka
więcej podobnych podstron