Politechnika Śląska w Gliwicach
Wydział Elektryczny
Studia magisterskie
Kierunek Elektronika i Telekomunikacja
Ćwiczenia laboratoryjne z przedmiotu
AUTOMATYKA I STEROWANIE
REGULACJA PRĘDKOŚCI OBROTOWEJ
Semestr VI Data wykonania ćwiczenia:
11.04.2005 r.
Grupa KSS 2
Sekcja II:
Chropacz Paweł
Motyka Ryszard
Sawczuk Grzegorz
Prowadzący:
dr inż. Henryk Urzędniczok
CEL ĆWICZENIA:
Podstawowym celem tego ćwiczenia jest zapoznanie się z układem służącym do stabilizacji prędkości obrotowej silnika prądu stałego. W czasie wykonywania tego ćwiczenia skupiliśmy się na układzie ze sprzężeniem od wielkości zakłóceniowej. Dokonamy badania właściwości statycznych i dynamicznych takiego układu regulacji, przy zmieniającej się wartości zadanej i obciążenia, które będzie źródłem zakłóceń.
2. PRZEBIEG POMIARÓW ORAZ OPIS METODY POMIAROWEJ:
Opis stanowiska pomiarowego:
W stanowisku pomiarowym można wyróżnić następujące dwa bloki funkcjonalne:
pierwszy stanowi układ sterująco - pomiarowy, który jest realizowany przez system komputerowy, czyli odpowiednie oprogramowanie na komputerze klasy PC,
układ wykonawczy, czyli silnik sprzężony mechanicznie z prądnicą i przetwornikiem obrotowo - impulsowym, realizowany jako układ dołączony do komputera
Ogólny schemat układu pomiarowego:
W układzie tym Ks(s) stanowi obiekt regulacji, jest nim silnik sprzężony mechanicznie z prądnicą, która jest z kolei obciążona rezystancją. Zmiana obciążenia spowoduje zmianę momentu hamującego, czego skutkiem będzie zmiana prędkości obrotowej układu. W tym momencie zacznie płynąć prąd, którego będziemy traktować jako zakłócenie. Które z kolei jest przekształcone na napięcie (Kr), a następnie podane na wejście sumatora. Sygnał sterowania jest więc suma wartości zadanej Uz i wzmocnionego Kr napięcia na rezystancji RN2, przez który płynie prąd w obwodzie twornika. Należy zwrócić uwagę na to, że sygnał sprzężenia jest doprowadzony ze znakiem „plus” do węzła sumującego. Jest to związane z tym iż kierunek działania zakłócenia jest przeciwny do kierunku działania wymuszenia - oznacza to, że zwiększanie prądu w obwodzie prądu powoduje zmniejszenie prędkości obrotowej silnika.
Pomiary:
ĆWICZENIE 1:
Dla określonej wartości zadanej Uz dokonujemy zmian rezystancji obciążenia prądnicy. Na tej podstawie odczytujemy wartość prędkości obrotowej n, oraz wartość natężania prądu w obwodzie prądnicy I2. Pomiary zostały dokonywane przy wykorzystaniu opcji programu „pomiary statyczne kr = 0 ; kw = 1”. Badany układ pomiarowy jest układem otwartym. Wyniki umieszczono w poniższej tabeli.
Dla Uz=4V:
I2[mA] |
n[obr/min] |
URN[V] |
I1[A] |
Us[V] |
28 |
694 |
0,028 |
1,06 |
4,02 |
55 |
674 |
0,04 |
1,08 |
4,02 |
60 |
675 |
0,049 |
1,07 |
4,02 |
64 |
672 |
0,05 |
1,04 |
4,02 |
86 |
649 |
0,072 |
1,12 |
4,02 |
94 |
648 |
0,08 |
1,1 |
4,02 |
118 |
607 |
0,1 |
1,15 |
4,02 |
136 |
598 |
0,112 |
1,16 |
4,02 |
165 |
584 |
0,131 |
1,17 |
4,02 |
202 |
504 |
0,168 |
1,27 |
4,02 |
Dla Uz=5V:
I2[mA] |
n[obr/min] |
URN[V] |
I1[A] |
Us[V] |
48 |
1154 |
0,04 |
1,12 |
5,04 |
68 |
1146 |
0,055 |
1,15 |
5,04 |
74 |
1134 |
0,06 |
1,16 |
5,04 |
85 |
1095 |
0,065 |
1,17 |
5,04 |
107 |
1080 |
0,085 |
1,21 |
5,04 |
137 |
1031 |
0,112 |
1,24 |
5,04 |
196 |
956 |
0,163 |
1,37 |
5,04 |
Na tej podstawie można wykreślić charakterystykę:
n=f(I2)
Dla układu z zerowym obciążeniem. Badamy wpływ wartości napięcia zadanego na wartość obrotów silnika. Otrzymamy w ten sposób charakterystykę sterowania. Wyniki umieszczono w poniższej tabeli:
Uz[V] |
6 |
5,52 |
5,04 |
4,5 |
4 |
3,5 |
3 |
2,5 |
n[obr/min] |
1625 |
1411 |
1212 |
990 |
786 |
584 |
387 |
174 |
Można na tej podstawie wykreślić charakterystykę:
n=f(Uz)
ĆWICZENIE 2:
Dla układu ze sprzężeniem od zakłóceń dokonujemy pomiarów dynamicznych.
Wykonane zostaną pomiary odpowiedzi układu zamkniętego na:
skokową zmianę wartości zadanej,
zmianę prądu w obwodzie prądnicy.
Korzystając przy tym z opcji „pomiarów dynamicznych”. Uzyskaliśmy następujące przebiegi czasowe:
Uz=6V, Iobc -wyłączone
Uz=6V, Iobc -załączone
Uz=0V, Iobc -załączone
Uz=0V, Iobc -wyłączone
ĆWICZENIE 3:
Kolejne zadanie polega na znalezieniu wartości współczynnika kr, takiego aby przy zmianie obciążania (czyli zakłócenia) wartość prędkości obrotowe pozostała stała. Sprawdzenia tego dokonujemy w układzie zamkniętym. Udało nam się znaleźć taka wartość współczynnika doświadczalnie. W tym przypadku wynosi on:
![]()
Można go również wyznaczyć korzystając z zależności:
![]()
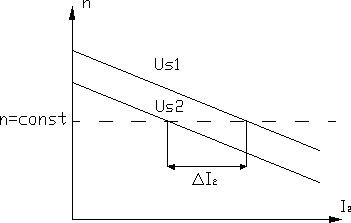
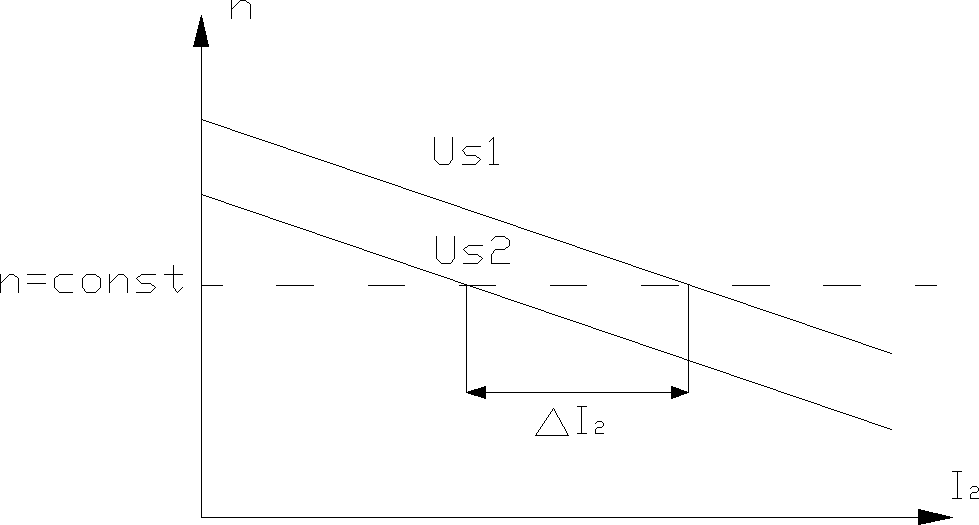
W tym celu należy aproksymować proste uzyskane w ćwiczeniu pierwszym:
Dla: Uz=5V n = -1,4039I2 + 1228,5
Dla: Uz=4V n = -1,0416I2 + 735,5
Dla ustalonej prędkości n=700[obr/min]
Po formalnym przekształceniu wzorów i podstawieniu otrzymuje się:
![]()
![]()
,
więc:
![]()
Przy następujących zdanych:
Otrzymujemy:
![]()
Dla tak określonego pomiarowo współczynnika otrzymano następujące przebiegi czasowe:
Uz=3,96V, Iobc -załączone
Uz=3,96V, Iobc - wyłączone
Dokonamy jeszcze pomiarów statycznych układu przy takich ustawieniach. Wyniki umieszczono w poniższej tabeli pomiarowej.
I2[mA] |
n[obr/min] |
URN[V] |
I1[A] |
Us[V] |
54 |
813 |
0,043 |
0,96 |
4,13 |
69 |
822 |
0,057 |
0,97 |
4,18 |
82 |
825 |
0,067 |
0,97 |
4,21 |
94 |
816 |
0,077 |
1,03 |
4,25 |
121 |
828 |
0,107 |
1,06 |
4,35 |
134 |
817 |
0,11 |
1,23 |
4,37 |
Charakterystykę umieszczono na wykreślonych wykresach pochodzących z ćwiczenia 1.
WNIOSKI
Przy wyznaczaniu charakterystyki statycznej uzyskaliśmy typową charakterystykę mechaniczną silnika prądu stałego. Wzrost prądu twornika spowodował zmniejszenie się prędkości obrotowej. Jednak istnieje możliwość takiego doboru nastaw regulatora, aby uzyskać praktycznie stałą wartość obrotów mimo zmiany obciążenia - które w ćwiczeniu zostało potraktowane jako zakłócenie.
Przy wyznaczaniu charakterystyki sterowania zauważamy, że jest ona liniowa.
Z odpowiedzi obiektu regulacji przy wyłączonym obciążeniu stwierdzamy, że jest on elementem 1 rzędu. W stanie ustalonym wprowadzono skokowo obciążenie zmniejszyło się prędkość obrotowa, zmienił się również sygnał wprowadzany do sumatora. Wyłączenie skokowe napięcia zasilającego spowodowało zaniknięcie ruchu.
Dla wyznaczonej wartości współczynnika kr uzyskaliśmy praktycznie stałą wartość prędkości zarówno w przypadku skokowego podłączeniu jak i wyłączeniu obciążenia. Jednak istnieje różnica między teoretyczna wartością a określona podczas pomiaru. Może to być spowodowane tym, że proste zostały opisywane równaniem matematycznym przez program komputerowy, a przy tym proste te nie są równoległe jak by tego wymagała opisywana metoda. Dodatkowo w czasie obydwu pomiarów były różne wartości napięcia Uz -duży wpływ może mieć więc charakterystyka sterowania, czyli jej liniowość. Jak widać na charakterystyce widać stała (prawie stałą) wartość prędkości obrotowej w zakresie zmian jakie dokonaliśmy. Oczywiście w momentach zmiany sygnałów zakłócających zmienił się sygnał sprzężenia, w taki sposób aby mógł skompensować te zmiany.
LABORATORIUM AUTOMATYKI I STEROWANIA
REGULACJA PRĘDKOŚCI OBROTOWEJ
+Uccc
no(s)
Uo=noko
kw
pomiar z1
kr
Z1(s)
KZ1(s)
n(s)
KS(s)
Wyszukiwarka
Podobne podstrony:
regulacja prędkości obrotowej, Automatyka
BADANIE PRZETWORNIKÓW PRĘDKOŚCI OBROTOWEJ 2, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdani
BADANIE PRZETWORNIKÓW PRĘDKOŚCI OBROTOWEJ, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
Układ automatycznej regulacji prędkości obrotowej silnika
Regulacja prędkości obrotowej ze sprzężeniem, Automatyka
Układ automatycznej regulacji prędkości obrotowej silnika prądu stałego
Układ automatycznej regulacji prędkości obrotowej
1 1 pomiary parametrów ruchu drgań i prędkości obrotowej
Ćw 4 Pomiary prędkości obrotowej
24b ?danie zależności momentu od prędkości obrotowej
6.Sprzęgła i napędy, Przekładnie, Podstawowa wielkoscia charakteryzujaca przekladnie jest przełożeni
Prędkość obrotowa
Mikroprocesorowy – tranzystorowy regulator prędkości obrotowej DSS2 C
Wykład 5 Regulacja prędkości obrotowej silników trakcyjnych
POMIARY PRĘDKOŚCI OBROTOWEJ, obroty-sc, 18
15 Reduktory prędkości obrotowej
Prędkość obrotowa (1)
Predkosc obrotowa, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
regulacja prędkości obrotowej
więcej podobnych podstron