Grupa 201 L02 |
TECHNIKI WYTWARZANIA II LABORATORIUM |
POLITECHNIKA ŚWIĘTOKRZYSKA WZiMK |
Imię i Nazwisko: 1. Pardela Joanna 2. Tkaczewska Ewa 3. Wykrota Martyna |
Temat ćwiczenia:
Technologia wykonywania kół zębatych. |
Data:
05-01-2013 |
Na kołach o małych modułach, wykonanych z plastycznych metali zazębienia można, nawalcować, dokładne jednak zazębienie wykonuje się skrawaniem. Stosowane są następujące metody obróbki skrawaniem:
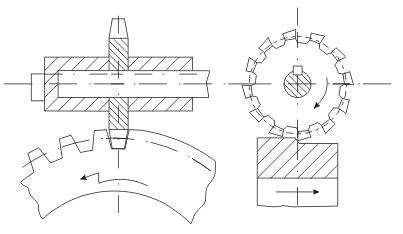
1. Metoda kształtowa - jest mało wydajna, mało dokładna, stosowana przy naprawach i małych seriach. Wręby międzyzębne frezuje się frezami krążkowymi na frezarce uniwersalnej. Narzędzie wykonuje ruch obrotowy, a stół z umieszczonym na nim kołem i podzielnicą - ruch posuwisty (rys.1). Podział obwodu na części wykonuje się za pomocą podzielnicy.
Rys.1 - Proces frezowania przy metodzie kształtowej.[1]
Wadą tej metody są znaczne niedokładności spowodowane błędem ustawienia kąta, podziału, kształtu oraz niewielką gładkością powierzchni spowodowaną trudnością uzyskania dobrych kątów skrawania na frezach krążkowych.
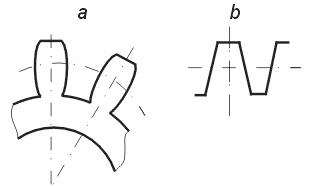
Rys.2 - Kształty wrębu międzyzębnego.[1]
Kształt wrębu międzyzębnego przy tym samym module zależy od liczby zębów. Przy małej liczbie zębów kształt wrębu pokazano na rysunku 2a, przy Z = ∞, tzn. listwie zębatej - na rys. 2b. Zatem dla różnej liczby zębów na kole należałoby mieć odpowiedni frez krążkowy. Chcąc w rozsądny sposób zaspokoić potrzeby, do wykonania zazębienia używa się kompletu złożonego z ośmiu, a przy dokładniejszym wykonaniu - z szesnastu, frezów dla jednego modułu.[2]
2. Metody obwiedniowe (rys. 3) mają te zalety, że jednym narzędziem można wykonać zazębienia o różnej liczbie zębów i tym samym module. Metoda ta jest znacznie wydajniejsza i dokładniejsza niż poprzednia. Przedstawiona została schematycznie na rys. 3. Narzędziem jest frez ślimakowy - 1 otrzymujący ruch obrotowy i posuwisty w dół, natomiast obrabiane koło - 3 mocowane na stole frezarki otrzymuje ruch obrotowy, sprzęgnięty z ruchem obrotowym freza - 2.
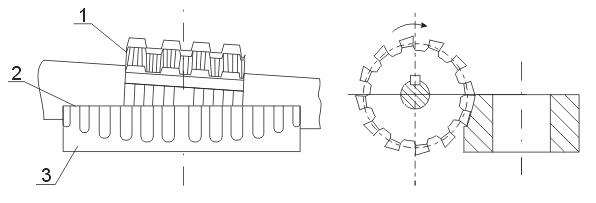
Rys. 3 - Sposób frezowania przy metodzie obwiedniowej.[1]
Podczas obrotu kół dwa współpracujące zęby otaczają się jednocześnie także ślizgając się po sobie. Ten poślizg jest niekorzystnym, lecz niemożliwym do uniknięcia zjawiskiem. Tylko w bardzo wąskim zakresie, który teoretycznie sprowadza się do jednego punktu C, występuje czyste toczenie się zębów bez poślizgu. Punkt ten nazywa się punktem tocznym, który wyznacza koło toczne o średnicy dw. Koła toczne dla obu współpracujących kół są styczne w punkcie C.
Punkty styku zębów w czasie obrotu układają się na odcinku (E1, E2) zwanym odcinkiem przyporu. Kąt α zawarty między tym odcinkiem a linią styczną do kół tocznych w punkcie tocznym jest zwany kątem przyporu i jest jednocześnie parametrem ewolwenty. Zarys nominalny, powszechnie używany w budowie maszyn i przyjęty przez praktycznie wszystkie normy na całym świecie ma kąt przyporu α=20° Jednocześnie dla zarysu nominalnego średnice podziałowe kół pokrywają się z kołami tocznymi.[2]
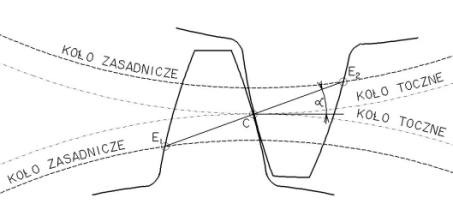
Rys.4 - Schemat mechaniki zazębiania.
Parametry kół zębatych:
z - liczba zębów
d - średnica podziałowa -średnica okręgu na którym szerokość wrębu jest równa grubości zęba
da- średnica wierzchołkowa-średnica okręgu przechodzącego przez wierzchołki zębów
df - średnica stóp-średnica okręgu przechodzącego przez dna wrębów
db - średnica koła zasadniczego-czyli wyobrażalnego koła z którego rozwijane są zarysy ewolwentowe boków zębów
p - podziałka obwodowa-odległość jednoimiennych boków zębów mierzona na łuku koła podziałowego
pb - podziałka zasadnicza -podziałka mierzona wzdłuż łuku koła zasadniczego
m - moduł zęba -parametr charakteryzujący wielkość zębów koła zębatego. Moduły kół współpracujących muszą być takie same. Moduł zęba jest wielkością znormalizowaną przez Polską Normę PN/M-88502.
h - wysokość zęba-suma wysokości głowy i stopy zęba
ha - wysokość głowy zęba
hf - wysokość stopy zęba
y - współczynnik wysokości zęba-wysokość głowy zęba wyrażona w krotności modułu
y = 1 zęby normalne stosowane w większości przekładni zębatych
y < 1 zęby niskie stosuje się w przekładniach zębatych stożkowych o zębach łukowych, w których koło małe ma niewielką liczbę zębów (od 5 do 10)
y > 1 zęby wysokie stosowane w pompach zębatych.
x - współczynnik korekcji-przesunięcie zarysu odniesienia przy wykonywaniu koła zębatego wyrażone w krotności modułu
x = 0 koło niekorygowane
x > 0 odsunięcie zarysu odniesienia np. dla uniknięcia podcinania zębów
x < 0 dosunięcie zarysu odniesienia
c - luz wierzchołkowy -zwykle 0,2 modułu.[3]
Ewolwenty mają duże zastosowanie w technice, a zwłaszcza w mechanice: np. zęby większości kół zębatych mają kształt ewolwenty. jedną z ewolwent okręgu o promieniu
i środku w początku układu można opisać równaniami z parametrem
oznaczającym kąt odwinięcia:
Literatura :
1.Houszka J.: Podstawy konstrukcji mechanicznych w elektronice. Wydawnictwo Politechniki Wrocławskiej 1985r.
2.Praca zbiorowa dr inż. Maciej Bernhardt: Mały poradnik mechanika. Wydawnictwo Naukowo Techniczne, Warszawa 1963.
3.Oleksiuk W., Paprocki K.: Konstrukcja mechanicznych zespołów sprzętu elektronicznego. Wydawnictwo Komunikacji i Łączności, Warszawa 1989.
Wyszukiwarka
Podobne podstrony:
Techniki wytwarzania 25.03.2013r, UTP, II semestr, Techniki Wytwarzania
18.03.13 Techniki wytwarzania wyklad, UTP, II semestr, Techniki Wytwarzania
Wejściówka nr 2. Formowanie ręczne i maszynowe, Rok II, Semestr 3, Techniki Wytwarzania Labs
Praca semestralna techniki wytwarzania sem II
Spr. 4-Materiałoznawstwo, Politechnika Poznańska ZiIP, II semestr, nom, Laboratoria-sprawozdania NOM
206e, Politechnika Poznańska ZiIP, II semestr, Fizyka, laborki fiza, Laborki, laborki fiza, Fizyka -
Ćw[1]. 04 - Stale narzędziowe, Politechnika Poznańska ZiIP, II semestr, nom, Laboratoria-sprawozdani
NOM ( I kolokwium II semestr) opracowane przez Piaska, Politechnika Poznańska ZiIP, II semestr, nom
104, Politechnika Poznańska ZiIP, II semestr, Fizyka, laborki fiza, Laborki, laborki fiza, Fizyka -
204pl, Politechnika Poznańska ZiIP, II semestr, Fizyka, laborki fiza, wszystkie laboratoria z 1 prac
Zakres tematyki obowiązujący na zaliczeniu części laboratoryjnej, ZiIP UR Kraków, II Semestr, Techni
104e, Politechnika Poznańska ZiIP, II semestr, Fizyka, laborki fiza, Laborki, laborki fiza, Fizyka -
100, Politechnika Poznańska ZiIP, II semestr, Fizyka, laborki fiza, Laborki, laborki fiza, Fizyka -
5 elazo w giel, Politechnika Poznańska ZiIP, II semestr, nom, Laboratoria-sprawozdania NOM, sprawoz
Lab fiz 302, Politechnika Poznańska ZiIP, II semestr, Fizyka, laborki fiza, wszystkie laboratoria z
108-2, Politechnika Poznańska ZiIP, II semestr, Fizyka, laborki fiza, Laborki, laborki fiza, Fizyka
więcej podobnych podstron