Sprawozdanie z laboratorium Automatyki i Robotyki
26 Marzec 2009 s.010
IRB 1400
Informacje ogóle:

Jest to robot sześcioosiowy zaprojektowany przez firmę ABB do zastosowań przemysłowych. Zapewnia szybkie i niezawodne cykle pracy, które zwiększają produktywność. Robot ten posiada kompaktową konstrukcję, wąski przegub oraz otwartą strukturę specjalnie dostosowaną do elastycznego użycia nawet w przypadku wykonywania skomplikowanych reorientacji przy wielu ograniczeniach przestrzeni. Systemem operacyjnym jest BaseWare OS, który nadzoruje ruch, wykonywane czynności i wywołuje zaprogramowane aplikacje.
Pomimo niewygórowanej ceny oferuje duże możliwości i efektywność pracy, dzięki czemu bardzo szybko zwraca się koszt jego zakupu. Głównym zastosowaniem robota IRB1400 jest wykonywanie prac spawalniczych, zgrzewalnych, montażowych, zmiana położenia i orientacji detali oraz procesów technologicznych. Przy pomocy miernika, czujnika czy głowicy pomiarowej może również wykonywać zadania specjalne takie jak pomiary czy diagnostyka. Poprzez swoją bardzo wysoką powtarzalność ruchów, która wynosi zaledwie 0,04 mm, prace wykonywane przez tego robota są bardzo dobrej jakości. Zdolność do dostosowania prędkości ruchu i dokładności pozycji do wymagań procesu oznacza, że można osiągnąć optymalne parametry produkcji. Dla zwiększenia funkcjonalności, IRB 1400 może zostać wyposażony w opcjonalne oprogramowanie (np. do klejenia, komunikacji sieciowej, wielozadaniowość, kontrola sensorów). Robot ten został stworzony z myślą o procesach technologicznych, gdzie został użyty ponad 10 000 razy od roku 1992. Robot IRB 1400 posiada sztywną i solidną konstrukcję (ważącą w sumie 225kg), dzięki której zapewniony ma długi okres bezawaryjnego użytkowania pomiędzy kolejnymi przeglądami. Bardzo ważną cechą robota jest jego duża przestrzeń robocza oraz zasięg (maksymalnie 1,44 m), udźwig do 5 kg, który może być rozszerzony o dodatkowe wyposażenie o masie do 18 kg, mocowane na górnym ramieniu, np. podajnik drutu spawarki lub wyspy zaworowe pneumatycznego oprzyrządowania.
Budowa:
Przemysłowy robot IRB1400 składa się z dwóch zasadniczych części: sterownika (S4C) oraz manipulatora. Manipulator posiada 6 stopni swobody. Poszczególne osie napędzane są silnikami prądu przemiennego za pośrednictwem przekładni i posiadają
elektromechaniczne hamulce, które blokują napędy po osiągnięciu zadanej pozycji. Sterownik robota posiada wydajną jednostkę centralną, oraz dwa dodatkowe komputery obsługujące
układy sterowania silników oraz sprzęgi komunikacyjne. Robot posiada złącza RS232, RS422 oraz 2 złącza CAN przeznaczone do obsługi sensorów zewnętrznych, posiada również
wejścia i wyjścia analogowe i dwustanowe, 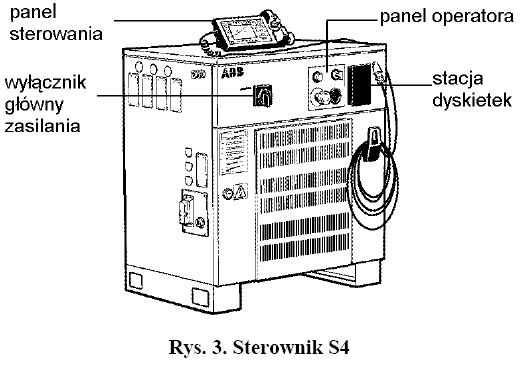
Robot IRB 1400 podaje współrzędne narzędzia (tool center point - TCP) we
współrzędnych zewnętrznych z dokładnością do dziesiętnych milimetra, co ułatwia zadanie,
nie jest konieczne wyznaczanie punktu za pomocą kinematyki odwrotnej. Można zdefiniować różne narzędzia (o różnych wymiarach, wadze, orientacji ).
Robot może być programowany zarówno w trybie on-line jak i off-line w języku wysokiego poziomu Rapid. Program napisany przy użyciu zewnętrznego komputera może być wczytany przez sterownik ze standardowego dysku 3.5”/1.44MB. Język Rapid posiada bogaty zestaw instrukcji ruchu. Istnieje możliwość sterowania zarówno we współrzędnych wewnętrznych jak i zewnętrznych.
Chwytak:
Jest to w robotyce oprzyrządowanie manipulatorów, robotów, dające możliwość chwycenia i transportu przedmiotów w zautomatyzowanych czynnościach precyzyjnych. Chwytak może być wyposażony w narzędzie (np. lutownica, spawarka), umożliwiające realizację określonych czynności.
Zadania chwytaka:
- uchwycenie manipulowanego przedmiotu z zapewnieniem mu właściwej orientacji
- utrzymanie przedmiotu pomimo działających sił zewnętrznych i przyspieszeń transportowych
- pozostawienie przedmiotu we właściwej orientacji w miejscu przeznaczenia
Kryteria podziału rozwiązań konstrukcyjnych chwytaków maszyn manipulacyjnych.
- realizowany sposób chwytania
- budowę
- parametry użytkowe
- system mocowania i wymiany w jednostce kinematycznej maszyny manipulacyjnej
- wyposażenie dodatkowe.
Ze względu na realizowany sposób chwytania wyróżnia się chwytaki:
- siłowe
- kształtowe
Dla chwytaków siłowych, siły oddziałujące na obiekt manipulacji mogą być typu:
- naprężającego (ściskającego, rozciągającego)
- przyciągającego
Ze względu na zasadnicze różnice w budowie wyróżniono chwytaki:
- ze sztywnymi końcówkami chwytnymi
- ze sprężystymi końcówkami chwytnymi
- z elastycznymi końcówkami chwytnymi
- adhezyjne (podciśnieniowe, magnetyczne)
- specjalne urządzenia chwytające.
W zależności od sposobu przemieszczania się końcówek chwytnych pod wpływem siły wytworzonej przez mechanizm napędowy wyróżnia się ruch końcówek:
- nożycowy
- szczypcowy
- imadłowy
Podział chwytaków ze względu na parametry użytkowe może dotyczyć:
- dysponowanej siły chwytu
- granicznych wymiarów chwytanego obiektu
- dopuszczalnych kształtów obiektu
- czasu uchwycenia obiektu manipulacji
Bibliografia:
http://rab.ict.pwr.wroc.pl/irb1400/
Wyszukiwarka
Podobne podstrony:
muszyński, W4 - elektroniki
krzysztofik, W4 - elektroniki
3858, W4 - elektroniki
polak, W4 - elektroniki
krzysztofik, W4 - elektroniki
polak, W4 - elektroniki
1643, W4 - elektroniki
3334, W4 - elektroniki
1663, W4 - elektroniki
pomianek, W4 - elektroniki
zamojski, W4 - elektroniki
radosz, W4 - elektroniki
późniak-koszałka, W4 - elektroniki
7807, W4 - elektroniki
galar, W4 - elektroniki
piasecki, W4 - elektroniki
klink, W4 - elektroniki
borowiec, W4 - elektroniki
więcej podobnych podstron