1. Podział materiałów przewodzących prąd elektryczny.
Przewodniki(metale, elektrolity) są to ciała, przez które przepływać może prąd. Dzieli się je na dwie grupy: metale gdzie prąd przepływa od + do - oraz elektrolity czyli roztwory wodne kwasów, zasad i soli
Izolatory są to ciała które nie przewodzą prądu. Do izolatorów zalicza się gazy, ciecze, oraz ciała stałe np. papier, szkło, porcelana, tworzywa sztuczne itp.
Półprzewodniki są to ciała o własnościach pośrednich między własnościami przewodników a dielektryków, które znalazły zastosowanie w elektronice
2. Siła elektromotoryczna źródła.
Stosunek energii uzyskanej przez ładunek elektryczny q na drodze od zacisku ujemnego do dodatniego źródła do tego ładunku (to, co się dzieje wewnątrz tego źródła).
![]()
Jednostka SEM: 1E=[1V]
3. Rezystancja i jej zależność od temperatury.
REZYSTANCJA:
![]()
R - rezystancja przewodnika [Ώ]
l - długość przewodu [m]
s - przekrój poprzeczny [m2]
![]()
- rezystywność (opór właściwy) [Ώm]
![]()
- konduktywność (przewodność właściwa - odwrotność rezystywności) [![]()
]
ZALEŻNOŚĆ OD TEMPERATURY:
Rezystancja przewodników wykonanych z metali i ich stopów ze wzrostem temperatury wzrasta, natomiast elektrolitów, grafitu oraz tlenków manganu, niklu, miedzi, kobaltu - maleje.
![]()
R- rezystancja w temp. vv
R- rezystancja w tempv2.
α- współczynnik temperaturowy rezystancji [![]()
]
4. Prawo Ohma.
Ujmuje zależność pomiędzy napięciem pod jakim znajduje się odbiornik o rezystancji R i natężeniem prądu I płynącym przez ten odbiornik.
![]()
; ![]()
; ![]()
Dla obwodu zamkniętego, w którym występuje źródło energii o SEM E i rezystancji wewnętrznej Rw oraz odbiornik o rezystancji R, wyrażenie na prąd płynący w tym obwodzie ma postać:
![]()
5. Prawa Kirchhoffa.
I prawo:
Algebraiczna suma prądów w węźle równa się 0. ![]()
II prawo:
W każdym obwodzie zamkniętym prądu stałego (oczku) algebraiczna suma SEM w nim działających jest równa algebraicznej sumie napięć występujących na poszczególnych rezystancjach obwodu. ![]()
6. Połączenie szeregowe odbiorników.
Stałą wartością dla wszystkich odbiorników jest prąd I.
Rezystancja zastępcza jest równa sumie rezystancji poszczególnych odbiorników. ![]()
Całkowity spadek napięcia jest równy sumie spadków napięcia na wszystkich odbiornikach połączonych szeregowo.
Całkowita moc prądu wydzielona w odbiornikach jest równa sumie mocy wydzielonych w poszczególnych odbiornikach.
![]()
7. Połączenie równoległe odbiorników.
Stałą wartością dla wszystkich odbiorników jest napięcie U.
Rezystancja zastępcza:
![]()
Konduktancja (przewodność) ![]()
Konduktancja zastępcza:
![]()
Rezystancja zastępcza dwóch równolegle połączonych odbiorników:
![]()
Całkowity prąd:
Całkowita moc prądu wydzielona w odbiornikach połączonych równolegle:
![]()
8. Szeregowe łączenie źródeł energii.
Łączenie szeregowe źródeł energii stosuje się najczęściej przy ogniwach i akumulatorach w celu otrzymania baterii o wyższym napięciu. Warunkiem optymalnego wykorzystania źródeł energii połączonych szeregowo jest równość ich prądów znamionowych.
SEM utworzonej baterii:
![]()
Rezystancja wewnętrzna utworzonej baterii:
![]()
Napięcie na zaciskach baterii w stanie obciążenia:
![]()
Prąd:
9. Równoległe łączenie źródeł energii.
Stosuje się w celu uzyskania w obwodzie zewnętrznym większego natężenia prądu, jak prąd znamionowy pojedynczego źródła. Bieguny jednoimienne łączone są razem.
ŹRÓDŁA O TAKIEJ SAMEJ SEM:
I. ![]()
; II. ![]()
to:
- Prądy płynące przez poszczególne źródła:
![]()
; ![]()
- Prąd w obwodzie:
![]()
- Prąd w obwodzie zewnętrznym:
![]()
- Jeżeli połączymy takich źródeł n:

ŹRÓDŁA O RÓŻNEJ SEM:
I. ![]()
; ![]()
- prąd wyrównawczy (![]()
)
![]()
- prądy płynące przez poszczególne źródła:
![]()
10. Charakterystyka zewnętrzna i stany pracy źródła.
CHARAKTERYSTYKA ZEWNĘTRZNA ŹRÓDŁA:
STANY PRACY ŹRÓDŁA ENERGII:
I. Stan jałowy; prąd w obwodzie nie płynie.
![]()
; U=E; P=UI=0
II. Stan obciążenia - gdy do zacisku źródła zostaje przyłączony odbiornik, który pobiera prąd I. Napięcie na zaciskach źródła: ![]()
W tym stanie występują 2 przypadki szczególne:
- stan obciążenia znamionowego, gdy U, P, I w obwodzie odpowiadają wartościom, na które zostały zaprojektowane.
- stan dopasowania - wówczas, gdy rezystancja obwodu zewnętrznego jest równa rezystancji wewnętrznego źródła.
III. Stan zwarcia- zwarcie- połączenie dwóch punktów obwodu elektrycznego elementem o rezystancji =0.
![]()
; Prąd zwarcia:![]()
; ![]()
; ![]()
; ![]()
11. Praca i moc prądu elektrycznego.
MOC PRĄDU ELEKTRYCZNEGO - jest to zdolność maszyny, urządzenia czy aparatu do wykonania pracy. ![]()
Jednostka mocy - wat: 1W=1V.1A
Moc znamionowa jest to moc, na którą maszyna lub urządzenie zostało zaprojektowane i zbudowane.
PRACA (ENERGIA) PRĄDU ELEKTRYCZNEGO:
W=Pt=UIt, gdzie: P - moc odbiornika; t - czas użytkowania odbiornika. Jednostka pracy - dżul:1W=[1J].
14. Elementy nieliniowe łączone szeregowo i równolegle.
Obwód jest liniowy, jeżeli jego rezystancja jest stała, a nieliniowy, jeżeli jego rezystancja zmienia się, np. przy zmianach temperatury wskutek przepływu prądu elektrycznego. Przykładem odbiornika nieliniowego jest żarówka elektryczna.
15. Przekształcanie obwodów trójkątowych i gwiazdowych.
Przekształcanie z gwiazdy w trójkąt.
![]()
![]()
![]()
Przekształcanie z trójkąta w gwiazdę.
![]()
![]()
![]()
16. Wielkości charakteryzujące pole elektryczne.
k - natężenie pola elektrycznego
![]()
- siła oddziaływania na ładunek
1[k]=1V/m
Natężenie pola elektrycznego nie zależy od ośrodka, w którym występuje.
D - indukcja dielektryczna
![]()
![]()
- przenikalność elektryczna
1[D]=1![]()
![]()
![]()
- strumień dielektryczny
![]()
V - potencjał
17. Szeregowe łączenie kondensatorów.
Łącząc szeregowo kondensatory zmniejszamy napięcie występujące na każdym z nich.
Napięcie szeregowo połączonych kondensatorów:
![]()
Pojemność zastępcza kondensatorów połączonych szeregowo:
![]()
Ładunek:
![]()
![]()
19. Równoległe łączenie kondensatorów.
Napięcie w układzie:
U=const.
Pojemność zastępcza kondensatorów połączonych równolegle:
![]()
Ładunek:
![]()
![]()
![]()
20. Rezystywność skrośna.
![]()
-Parametr służący do skonkretyzowania izolacyjnych cech dielektryków, które od przewodników i półprzewodników wyróżnia to, że nie występują w nich swobodne ładunki elektryczne lub ilość tych ładunków jest mała.
REZYSTYWNOŚĆ SKROŚNA określa prąd płynący całą objętością dielektryka pod wpływem pola elektrycznego. ![]()
;![]()
; ![]()
; 
![]()
Jednostka rezystywności skrośnej: ![]()
; ![]()
21. Rezystywność powierzchniowa.
Określona jest przez prąd płynący po powierzchni dielektryka pod działaniem pola elektrycznego o natężeniu k między dwoma elektrodami umieszczonymi na powierzchni dielektryka.
![]()
; ![]()
; ![]()
; ![]()
Jednostka rezystywności powierzchniowej: ![]()
22. Wytrzymałość dielektryczna.
Tym pojęciem określa się najmniejszą wartość natężenia pola elektrycznego w kV, przy którym dielektryk traci właściwości izolacyjne. ![]()
![]()
.
Przebicie elektryczne - spowodowane jest uszkodzeniem struktury materiału w wyniku uderzeń elektronów rozpędzonych do dużej prędkości w silnym polu elektrycznym. Czas niezbędny do wystąpienia tego zjawiska jest krótki i wynosi ![]()
.
Wytrzymałość dielektryczna poszczególnych materiałów na przebicie elektryczne zawiera się w granicach 200-700kV/mm.
Istotną cechą bardzo cienkiego dielektryka o grubości <1![]()
jest wzrost ich wytrzymałości dielektrycznej, co jest spowodowane małymi drogami ruchu swobodnych elektronów, który nie uzyskuje wówczas energii wystarczającej do przebicia dielektryka.
Przebicie cieplne - spowodowane jest naruszeniem równowagi cieplnej w dielektryku. Ilość ciepła wydzielona pod wpływem prądu skrośnego oraz innych strat występujących w zmiennych polach elektrycznych od ilości ciepła odprowadzanego z powierzchni dielektryka. Następuje wówczas cieplne zniszczenie dielektryka, które powoduje przebicie.
Wytrzymałość dielektryczna przebicia cieplnego jest zależna od częstotliwości zmienności pola elektrycznego i wynosi: 20-30kV/mm.
23. Włączanie napięcia stałego do obwodu z pojemnością.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
T=RC - stała czasowa
25. Podział ciał pod względem właściwości magnetycznych.
Na podstawie przenikalności wyróżniamy ciała:
- DIAMAGNETYCZNE ![]()
. Miedź, rtęć, bizmut, woda, alkohol, azot. (niemagnetyczne).
- PARAMAGNETYCZNE ![]()
. Powietrze, tlen aluminium.(niemagnetyczne)
np.
- FERROMAGNETYKI ![]()
. Żelazo, kobalt, nikiel i ich stopy. Znajdują bardzo istotną rolę.
26. Prawo przepływu.
Przepływem nazywamy sumę algebraiczną prądów przenikających powierzchnię objętą konturem dowolnej zamkniętej linii sił pola magnetycznego.
![]()
z - liczba zwojów
Prawo przepływu dla obwodu magnetycznego składającego się z n odcinków, w których istnieje równomierne pole magnetyczne:
![]()
![]()
![]()
![]()
- współczynnik przenikalności magnetycznej
dl - elementarne przesunięcie linii sił pola
H - natężenie pola
![]()
![]()
27. Natężenie pola magnetycznego przewodnika z prądem.
Przewód z prądem wytwarza pole:
![]()
Skalarnie:
![]()
F - siła działająca na przewód [N]
I - natężenie prądu [A]
l - długość czynna przewodu [m]
α- kąt między osią przewodu a kierunkiem linii sił pola
B - indukcja magnetyczna [T]
Kierunek działania siły określa reguła lewej dłoni.
28. Elektrodynamiczne oddziaływanie przewodów z prądem na siebie. Definicja Ampera.
Dwa przewody wiodące prąd w tym samym kierunku przyciągają się, w różnych kierunkach - odpychają się.
![]()
; ![]()
![]()
![]()
Siła wzajemnego oddziaływania dwóch bardzo długich, równoległych prostoliniowych przewodów z prądem:
![]()
l - długość układu przewodów [m]
a - odległość między osiami przewodów [m]
μ- przenikalność magnetyczna
I1,I2- natężenia prądów w przewodach [A]
F - siła wzajemnego oddziaływania [N]
DEFINICJA AMPERA.
Amper jest to natężenie prądu elektrycznego nieulegającego żadnym zmianom, który przepływając w dwóch przewodach równoległych o długości nieskończonej o przekroju kołowym znikomo małym, umieszczonych w próżni w odległości 1m od siebie wytwarza między tymi przewodami siłę ![]()
na każdy metr przewodu.
29. Prawo Ohma dla obwodu magnetycznego.
![]()
φ- strumień magnetyczny - odpowiednik prądu [Wb]
θ=Iz - siła magnetomotoryczna(przepływ) [A]
![]()
- reluktancja obwodu, oporność magnetyczna [![]()
]
30. Prawa Kirchhoffa dla obwodu magnetycznego.
I. Prawo Kirchhoffa dla obwodu magnetycznego

II. Prawo Kirchhoffa dla obwodu magnetycznego:
Algebraiczna suma sił magnetoelektrycznych (przepływów) działających w dowolnym zamkniętym obwodzie magnetycznym (oczku) jest równa algebraicznej sumie występujących w tym obwodzie spadków napięć.
![]()
; ![]()
31. Reluktancja magnetyczna.
RELUKTANCJA (opór magnetyczny) obwodu magnetycznego:
![]()
l - średnia długość obwodu magnetycznego [m]
s - pole powierzchni przekroju obwodu [m2]
μ- przenikalność magnetyczna materiału obwodu [H/m]
Jednostka reluktancja: ![]()
PERMEANCJA - przewodność magnetyczna, jest odwrotnością reluktancji.
![]()
[1H]
32. Strumień rozproszenia.
![]()
![]()
φ- strumień całkowity
φG- strumień główny
#- strumień rozproszenia
WSPÓŁCZYNNIK ROZPROSZENIA:
![]()
33. Prawo indukcji elektromagnetycznej.
![]()
; ![]()
Indukcja elektromagnetyczna występuje wtedy, gdy jest zmiana strumienia w czasie.
Siła elektromotoryczna rotacji powstaje podczas ruchu przewodu w stałym polu magnetycznym, z jednostajną prędkością, prostopadle do kierunku linii sił pola.
E=Blv
E - indukowana siła elektromotoryczna [V]
B - indukcja magnetyczna [T]
l - długość czynna przewodnika [m]
v - prędkość poruszania się przewodnika m/s
Faradaya prawo indukcji elektromagnetycznej, prawo opisujące zjawisko tworzenia się przepływu prądu w pętli z przewodnika umieszczonej w zmiennym polu magnetycznym: zmiana strumienia wektora indukcji magnetycznej przechodzącego przez powierzchnię ograniczoną pętlą z przewodnika powoduje powstanie w tym przewodniku siły elektromotorycznej SEM (ϑ) przeciwdziałającej zmianom pola, zgodnie z równaniem: δ= ; gdzie:Φ - strumień wektora indukcji magnetycznej B przenikającego przez powierzchnię S. Zmiany strumienia Φ w stacjonarnym polu magnetycznym mogą wynikać z obrotu pętli przewodnika L wokół osi prostopadłej do kierunku pola magnetycznego - zjawisko to wykorzystuje się w prądnicach.
34. Indukcyjność własna obwodu.
Każda zmiana prądu w obwodzie wywołana przez zmianę siły elektromotorycznej przez zmianę rezystancji obwodu czy też innych powodów pociąga za sobą odpowiednią zmianę strumienia, a to z kolei wywołuje indukowanie się w obwodzie siły elektromotorycznej nazywanej siłą elektromotoryczną samoindukcji lub indukcji własnej.
![]()
![]()
![]()
Współczynnik samoindukcji - indukcyjność własna obwodu:
![]()
Jednostka indukcyjności: 1L=[1H]
z - liczba zwojów
s - powierzchnia przekroju (cewki, rdzenia) [m2]
l - długość obwodu magnetycznego [m]
μ- przenikalność magnetyczna ośrodka
35. Indukcyjność wzajemna.
Gdy w pobliżu jednego obwodu elektrycznego znajdzie się drugi obwód niezależny elektrycznie od pierwszego (nie ma styku), to każda zmiana prądu w jednym z nich powoduje indukowanie się w obwodzie sąsiednim określonej siły elektromotorycznej nazywanej siłą elektromotoryczną indukcji wzajemnej.
![]()
przy czym: ![]()
![]()
- indukcyjności własne uzwojeń
k - współczynnik sprzężenia (k<1)
M - indukcyjność wzajemna
Warunkiem niezbędnym jest w tym przypadku skojarzenie przynajmniej części strumienia magnetycznego wywołanego przez pierwszy obwód z obwodem drugim. Im sprzężenie magnetyczne silniejsze, tym jest większe ich wzajemne oddziaływanie.
36. Energia pola magnetycznego.
![]()

![]()
- energia indukowana w polu magnetycznym
![]()
37. Siła udźwigu elektromagnesu.

F - siła udźwigu elektromagnesu [N]
B - indukcja magnetyczna w miejscu styku rdzenia ze zworą [T]
S - łączny przekrój styku rdzenia ze zworą [m2]
![]()
38. Krzywa magnesowania i pętla histerezy.
Krzywa magnesowania - podstawowa charakterystyka ciał magnetycznych.
Pętla histerezy.
![]()
- pozostałość magnetyczna
![]()
- natężenie powściągające, siła koercji magnetycznej
Pętla histerezy opisuje proces magnesowania i rozmagnesowania ciał. Pole objęte pętlą histerezy jest wprost proporcjonalne do strat cieplnych. Od kształtu histerezy zależy przydatność materiałów do konkretnych zastosowań: mat. Magnetycznie twarde mają szeroką pętlę histerezy i stosuje się je do wyrobu magnesów trwałych; materiały magnetycznie miękkie ma wąską pętlę histerezy i stosuje się je do wyrobu rdzeni transformatorów, elektromagnesów itp.
1 - krzywa magnesowania pierwotnego
2- H rośnie, B=const - zakres nasycenia
3-rozmagnesowanie; Br - indukcja szczurtkowa(w miejscu gdzie linia 3 przecina oś Y); Hc - natężenie koercji(w miejscu gdzie linia 3 przecina oś X)
4 - magnesowanie ciała w przeciwnym kierunku
5-rozmagnesowanie ciała
6-magnesowanie końcowe
39. Podział ciał magnetycznych.
40. Straty mocy w ferromagnetykach.
Związane z przemagnesowaniem
![]()
Przy przepływie prądu zmiennego przez cewkę straty mocy czynnej występują przez zjawiska: Histerezy magnetycznej-jest związane z przemagnesowaniem rdzenia i9 z częstotl. Zmian napięcia zas, Straty na histerezę wydzielaja się w postaci ciepła: ΔPh=Ch*f*Bm2 ; Prądy wirowe-wywoływane w stali rdzenia przez zmienny strumień magnetyczny, powodują straty mocy czynnej, i nagrzewają rdzeń, ΔPw=Cw*f2*Bm2 ;Straty te zmniejsza się przez podział rdzenia na wiele blach, oraz przez zwiększenie rezystywności materiału blach; Nasycenie stali rdzenia
41. Włączanie obwodu z indukcyjnością na napięcie stałe.
Cewka z rdzeniem zasilana pr. Stałym jest wykorzystywana w maszynach pradu stałego, synchronicznych, stołach magnetycznych, stycznikach itp. Ze względu na niezmienny w czasie strumień obwód magnetyczny nie jest przemagnesowany i nie powstają w nim prądy wirowe, więc można stosować lity rdzeń, nie z blach.. Cewka zasilana nap. Stałym ze strony elektrycznej jest obwodem liniowym, a z magnetycznej nieliniowy. Indukcyjność własna cewki: L=z2/Rμ ; Rμ=1/H -reluktancja obw. Magn.; decyduje o :energii pola magnetycznego jaką może zmagazynować cewka (Wm=½*L*I2), szybkości narastania prądu w cewce (i=(1-ex); x= -t/T ; T = L/R -stała czasowa), sile elektromotorycznej samoindukcji(es= -L).
![]()
![]()
![]()
![]()
- stała czasowa
Prąd narasta w obwodzie wykładniczo.
42. Wartości charakteryzujące prądy zmienne.
Prądem przemiennym nazywamy taki prąd, którego natężenie i kierunek zmieniają się okresowo w czasie w ten sposób, że prąd średni w ciągu okresu jest równy zeru. Przebiegi sinusoidalne napięcia i prądu:
![]()
![]()
u, i - wartości chwilowe napięcia i prądu
![]()
- wartości maksymalne (amplitudy) napięcia i prądu
ω- pulsacja
![]()
- fazy początkowe (dla t=0) napięcia i prądu
Wielkości sinusoidalne są jednoznacznie określone przez trzy wielkości: amplitudę, pulsację i początkowy kąt fazowy.
43. Wartość skuteczna prądu zmiennego.
Jest to wartość równoważnego prądu stałego, który w czasie równym okresowi prądu zmiennego powoduje wydzielenie takiej samej ilości ciepła w rezystancji R, co prąd zmienny.

Po uwzględnieniu zależności: ![]()
, otrzymuje się:
![]()
; ![]()
44. Wartość średnia prądu zmiennego.
Jest to taka równoważna wartość prądu stałego, która wywoła taki sam efekt np. elektrolityczny, w tym samym czasie co prąd zmienny.
Po uwzględnieniu zależności: ![]()
, otrzymuje się:
![]()
; ![]()
45. Współczynnik kształtu prądu zmiennego.
![]()
k- współczynnik kształtu
I - wartość skuteczna prądu
Im- wartość średnia prądu
46. Prostowanie jednopołówkowe.
Prostowniki to urządzenia przetwarzające prąd przemienny na jednokierunkowy.
Zależności napięciowe:
![]()
; ![]()
; ![]()
U1- wartość skuteczna napięcia
U0 - wartość średnia napięcia na odbiorniku
Uosk - wartość skuteczna napięcia na odbiorniku
Współczynnik napięciowy prostowania:
Napięcie tętnień i współczynnik tętnień:
![]()
![]()
Zależności prądowe:
![]()
; ![]()
; ![]()
I1- wartość skuteczna
I0- wartość średnia
Moc na wyjściu prostownika:
![]()
Moc na wejściu prostownika:
![]()
Na wykresie wygląda to tak jakby odcięło się jedną połówkę, na przykład tę spod osi, jest to prąd pulsacyjny. Realizuje się to podłaczając w obwód jedną diodę prostowniczą. Wsp. napięciowy prostowania wynosi 0,45
47. Prostowanie jednofazowe dwupołówkowe.
Zależności napięciowe:
![]()
; ![]()
; ![]()
Współczynnik napięciowy prostownika:
Zależności prądowe:
![]()
; ![]()
; ![]()
Napięcie tętnień i współczynnik tętnień:
Moc na wyjściu prostownika:
![]()
Moc na wejściu prostownika:
![]()
, gdyż w obu połówkach występuje przepływ prądu.
Na wykresie wygląda to tak jakby dolną połówkę sinusoidy (spod osi) odbić nad oś. Realizuje się to za pomocą mostka Graetza (cztery diody prostownicze połączone w odpowiedni sposób) Wsp. napięciowy prostowania wynosi 0,9, co oznacza że prostowanie dwupołówkowe jest sprawniejsze niż jednopołówkowe.
48. Elementy R,L,C połączone szeregowo w obwodzie prądu przemiennego.
I=const.
Napięcia:

![]()
Impedancja (opór pozorny):
![]()
Prawo Ohma:

3 przypadki:
1) ![]()
- układ posiada czynno-indukcyjny charakter obciążenia, napięcie wyprzedza prąd o kąt ![]()
.
2)![]()
- kład posiada czynno-pojemnościowy charakter obciążenia.
3)![]()
. Występuje rezonans napięć.
Impedancja: ![]()
Współczynnik mocy: ![]()
Natężenie prądu w obwodzie jest warunkowane tylko wartością rezystancji R: ![]()
Napięcie: ![]()
Częstotliwość rezonansowa: uwzględniając zależności ![]()
oraz ![]()
, rezonans napięć zachodzi tylko dla jednej częstotliwości:![]()
.
L - indukcyjność własna cewki [H]
C - pojemność kondensatora [F]
49. Elementy R,L,C połączone równolegle w obwodzie prądu przemiennego.
Natężenia prądu:
![]()
zgodnie z I prawem Kirchhoffa.
Z prawa Ohma:
![]()
; ![]()
; ![]()
![]()
Składowa czynna: ![]()
Składowa bierna: ![]()
![]()
![]()
3 przypadki:
1) ![]()
- układ ma charakter indukcyjny.
2) ![]()
- układ ma charakter pojemnościowy.
3) ![]()
![]()
50. Moc prądu sinusoidalnego.
Moc czynna - określa zdolność źródła prądu czy odbiornika do wykonania określonej pracy, w odbiorniku moc ta jest z nieodwracalną przemianą energii elektrycznej na energię cieplną, świetlną, mechaniczną.
![]()
[W]
Moc bierna - nie wytwarza pracy, lecz powoduje powstawanie i zanikanie pól magnetycznych i elektrycznych. Pulsuje pomiędzy źródłem a odbiornikiem z częstotliwością dwukrotnie większą od częstotliwości napięcia, prądu.
![]()
[var]
Moc pozorna - zawierająca w sobie moc czynną i bierną decyduje o stopniu obciążenia przewodów zasilających odbiornik, czyli linii, którą ta moc jest przesyłana.
![]()
![]()
[VA]
U,I - wartości skuteczne napięcia i prądu
![]()
- kąt przesunięcia fazowego pomiędzy napięciem a prądem
Powiązanie mocy:
![]()
![]()
51. Współczynnik mocy i sposoby jego poprawy.
Współczynnik mocy jest to stosunek mocy czynnej do mocy pozornej. ![]()
Sposoby poprawy współczynnika mocy:
--- kompensacja:
- indywidualna (każdy odbiornik kompensujemy oddzielnie)
- centralna (np. silniki synchroniczne)
- grupowa
52. Zależności w układach trójfazowych gwiazdowych.
Układ gwiazdowy otrzymujemy w wyniku połączenia początku lub końca uzwojenia w jeden punkt zwany neutralnym lub zerowym.
![]()
![]()
![]()
- prąd, napięcie przewodowe
![]()
- prąd, napięcie fazowe
53. Zależności w układach trójfazowych trójkątowych.
Układ trójkątowy otrzymuje się przez szeregowe połączenie poszczególnych uzwojeń stojana prądnicy.
![]()
![]()
![]()

54. Stany niesymetryczne w układach z odbiornikiem gwiazdowym.
- zasilanie trójfazowe czteroprzewodowe:
Napięcia na poszczególnych odbiornikach fazowych są takie same i równe napięciom fazowym sieci (![]()
). Wartości skuteczne prądów płynących w przewodach fazowych zasilających odbiornik:
Współczynnik mocy odbiorników fazowych:
![]()
Prąd IN w przewodzie neutralnym równa się sumie geometrycznej prądów płynących w przewodach fazowych: ![]()
- zasilanie trójfazowe trójprzewodowe:
Napięcia przewodowe występujące między przewodami fazowymi sieci zasilającej tworzą trójkąt równoboczny, natomiast ulega zniekształceniu gwiazda napięć fazowych występujących na odbiornikach składowych. Na odbiorniku o mniejszej impedancji wystąpi niższe napięcie a o większej impedancji napięcie wyższe. W rozpatrywanym przypadku:
![]()
, natomiast suma prądów musi być równa 0. (![]()
)
W układach z odbiornikami gwiazdowymi niesymetrycznymi konieczne jest stosowanie przewodu neutralnego, który zapewnia symetryczny rozkład napięć na odbiornikach fazowych. Nie wolno stosować w nich bezpieczników, bowiem w przypadku przepalenia przy asymetrii obciążenia może wystąpić duża asymetria napięć.
.
56. Moc odbiornika trójfazowego.
Moc czynna odbiornika trójfazowego jest sumą mocy czynnych odbiorników składowych, niezależnie od tego czy odbiornik jest skojarzony w gwiazdę czy w trójkąt:![]()
, przy czym moce czynne odbiorników składowych określają zależności:
W przypadku odbiornika symetrycznego:
![]()
lub ![]()
Moc bierna odbiornika trójfazowego jest sumą mocy biernych odbiorników składowych: ![]()
. (![]()
…)
W przypadku odbiornika symetrycznego:
![]()
lub ![]()
Moc pozorna:
W przypadku odbiornika symetrycznego gwiazdowego lub trójkątowego:
![]()
lub ![]()
W przypadku odbiornika niesymetrycznego:
![]()
Wypadkowy współczynnik mocy odbiornika niesymetrycznego:
![]()
58. Budowa i zasada działania transformatora.
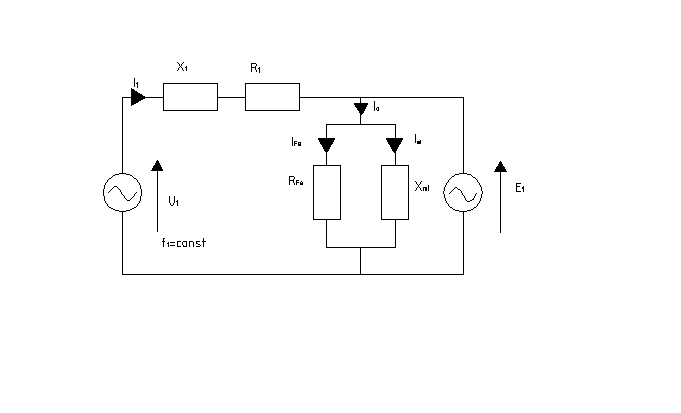
TRANSFORMATOR - statyczne urządzenie służące do zmiany wartości skutecznych napięć i prądów na zasadzie indukcji elektromagnetycznej. Składa się z obwodu magnetycznego oraz dwóch uzwojeń nie połączonych metalicznie. Rdzeń - obwód magnetyczny wykonuje się z blachy elektrotechnicznej. Uzwojenie zasilane z sieci nazywa się uzwojeniem pierwotnym a zasilające odbiornik - uzwojeniem wtórnym.
W transformatorach wykorzystane jest zjawisko indukcji elektromagnetycznej polegające na indukowaniu siły elektromotorycznej e w uzwojeniu o ilości zwojów z przez wnętrze, którego przenika zmienny strumień.
![]()
Uzwojenie pierwotne zasilane napięciem przemiennym wzbudza w rdzeniu przemienny strumień magnetyczny:
![]()
, który indukuje w obu uzwojeniach przemienne siły elektromotoryczne E1 i E2 o wartościach skutecznych:
E1E2 - wartości skuteczne sił elektromotorycznych uzwojenia pierwotnego i wtórnego
Z1z2 - liczby zwojów szeregowych, odpowiednio uzwojenia pierwotnego i wtórnego
![]()
- amplituda strumienia magnetycznego zmieniającego się sinusoidalnie
Przekładnia transformatora:
![]()
59. Stany pracy transformatora.
STAN JAŁOWY - uzwojenie pierwotne zasilane jest napięciem znamionowym (![]()
) a uzwojenie wtórne - otwarte (![]()
). W badaniach transformatora, stan jałowy wykorzystuje się do wyznaczenia przekładni, prądu stanu jałowego I0 oraz strat mocy czynnej ![]()
w stali rdzenia.
Przekładnia napięciowa:
![]()
![]()
ponieważ ![]()
Prąd stanu jałowego ![]()
ma dwie składowe: czynną I0cz i bierną I2 nazywaną prądem magnesującym.
![]()
składowa czynna Iocz charakteryzuje straty mocy czynnej w stali rdzenia, natomiast prąd magnesujący Iu wzbudza strumień fi.
STAN OBCIĄŻENIA - uzwojenie pierwotne jest zasilane napięciem znamionowym, uzwojenie wtórne zasila odbiornik. Siła magnetomotoryczna strony wtórnej ![]()
wytwarza strumień fi2 przeciwnie skierowany do strumienia fi1, wytworzonego przez amperozwoje strony pierwotnej ![]()
, w rdzeniu występuje strumień główny fi odpowiadający amperozwojom ![]()
.
![]()
Prąd I0 w porównaniu z prądem I1n ma małą wartość: ![]()
![]()
W transformatorze obniżającym napięcie prąd ![]()
, uzwojeń podwyższającym odwrotnie prąd ![]()
, natomiast moce pozorne po obu stronach transformatora są praktycznie równe.
![]()
Moc transformatora warunkuje przekrój żelaza rdzenia (wzór Richtera):

![]()
- powierzchnia przekroju żelaza kolumny [cm2]
S - moc jednej kolumny VA
f - częstotliwość [Hz]
C - stała zawarta uzwojeń granicach 4-6.
Wokół uzwojeń powstają strumienie rozproszenia ![]()
które są w fazie z prądami i proporcjonalne do prądów ponieważ większą część drogi przebywają w powietrzu. Strumienie te indukują w uzwojeniach transformatora siły elektromotoryczne samoindukcji:
STAN ZWARCIA - uzwojenie pierwotne zasilane jest z sieci, uzwojenie wtórne zwarte
- zwarcie awaryjne - zaciski wtórne transformatora zostają zwarte przy zasilaniu uzwojenia pierwotnego napięciem znamionowym ![]()
. Zdarza się to w czasie awarii. W uzwojeniach transformatora płyną duże prądy zwarcia ![]()
przekraczające wielokrotnie wartości znamionowe. Zwarcie awaryjne jest niebezpieczne dla transformatora, bo wydziela się wówczas bardzo duża ilość ciepła, która może spowodować zniszczenie izolacji transformatora.
- zwarcie pomiarowe - wykonywane celowo przy obniżonym napięciu zasilającym dla określenia parametrów transformatora.
Próba zwarcia pomiarowego (![]()
) ma na celu wyznaczenie procentowego napięcia zwarcia ![]()
oraz strat mocy czynnej ![]()
w uzwojeniach, które odpowiadają obciążeniu znamionowemu.
gdzie:
![]()
- impedancja zastępcza transformatora
I1n - prąd znamionowy strony pierwotnej transformatora
Napięcie zwarcia jest niewielkie i wynosi ![]()
. Prądy zwarcia ustalonego przy znamionowym napięciu zasilającym:

60. Schemat zastępczy transformatora.
61. Straty mocy występujące w transformatorze i sposób ich wyznaczania.
--- straty w transformatorze:
![]()
W stosunku do zmienności prądu obciążenia transformatora jego napięcie jest praktycznie stałe , czyli w warunkach ruchowych straty w żelazie są stałe, natomiast straty w uzwojeniu zależą od kwadratu prądu.
Stan jałowy:
Moc czynna w stanie jałowym transformatora z uwagi na małą wartość ![]()
, jest praktycznie równa stratom mocy czynnej w żelazie rdzenia.
![]()
![]()
- straty wynikające z przemagnesowania rdzenia tzw. straty histerezowe
![]()
- straty od prądów wirowych
Przy stałej częstotliwości, straty w żelazie zależą od indukcji magnetycznej (napięcia zasilającego): ![]()
i nie zależą praktycznie od obciążenia.
Stan zwarcia:
Straty w uzwojeniach tzw. Straty obciążeniowe:
![]()
![]()
- rezystancja uzwojeń pierwotnego i wtórnego.
Rezystancja zastępcza i reaktancja zastępcza transformatora:
![]()
- rezystancja i reaktancja rozproszeniowa uzwojenia wtórnego przeliczone na stronę pierwotną
Straty mocy czynnej w stali rdzenia w stanie zwarcia pomiarowego z uwagi na niskie napięcie zasilające, są pomijalnie małe.
Straty mocy czynnej w stali rdzenia wyznacza się dzięki badaniu w stanie jałowym, I0 = I0cz+Iμ ; I0 = prąd stanu jałowego; składowa I0cz charakteryzuje straty mocy czynnej w stali rdzenia. Straty mocy czynnej w uzwojeniach wyznacza się dzięki stanowi zwarcia, Pz = I21n*Rt Ze stratami mocy wiąże się sprawność transformatora.
62. Sprawność transformatora.
Oblicza się jako stosunek mocy czynnej oddanej do mocy czynnej pobieranej przez transformator:
![]()
![]()
![]()
- straty mocy czynnej w uzwojeniach przy danym obciążeniu
![]()
- straty mocy czynnej w uzwojeniach przy obciążeniu znamionowym.
Sprawność transformatora zależy od stopnia i charakteru obciążenia.
63. Autotransformator. Budowa. Moc własna i przechodnia. Współczynnik redukcji.
W odróżnieniu od transformatora posiada tylko jedno uzwojenie, część, którego stanowi uzwojenie wtórne. Mogą być wykorzystywane do zasilania odbiorników w zasadzie tylko przy niskim napięciu nie przekraczającym 250V. Tzw. oszczędnościowy.
Przekładnia autotransformatora:
![]()
Moce w autotransformatorze:
- przechodnia: ![]()
- własna: ![]()
Współczynnik redukcji:
![]()
64. Przekładnik napięciowy.
PRZEKŁADNIKI - transformatory pomiarowe małej mocy, przeznaczone do poszerzania zakresów pomiarowych mierników, umożliwiają pomiar napięcia, prądu, mocy, energii przy wysokim napięciu, odizolowują stronę wysoką od niskiej.
PRZEKŁADNIK NAPIĘCIOWY - przyłącza się do sieci równolegle, posiadają znormalizowane napięcie wtórne wynoszące 100V, natomiast napięcia pierwotne 6,10,15,30,60,110,220 kV w zależności od potrzeby. Do pomiaru dużych napięć.
Wartość napięcia strony pierwotnej przekładnika (sieci):
![]()
![]()
- wskazania woltomierza
![]()
- przekładnia przekładnika napięciowego.
65. Przekładnik prądowy.
Włącza się szeregowo z odbiornikiem. Z uwagi na małą wartość impedancji mierników, pracuje podobnie, jak transformator w stanie zwarcia, dla którego obowiązuje:
![]()
Przerwa w obwodzie wtórnym przekładnika z uwagi na wymuszony przez odbiornik, prąd pierwotny I1, powoduje wzrost strumienia w rdzeniu do wartości:

w następstwie czego, w obwodzie wtórnym pojawia się znaczne napięcie mogące zniszczyć izolację, jak również zagrażać bezpieczeństwu obsługi. Prąd wtórny przekładników technicznych wynosi 5A, pierwotny natomiast, do kilku tys. A, w zależności od potrzeby.
66. Układy połączeń transformatorów trójfazowych.
UKŁAD POŁĄCZEŃ jest to sposób połączenia uzwojeń transformatora strony górnej i dolnej. Uzwojenia możemy łączyć w gwiazdę, trójkąt lub zygzak. Grupa połączeń mówi o tzw. przesunięciu godzinowym wyrażonym liczbą od 0-12 przy czym przesunięcie to liczy się określając kąt przesunięcia fazowego mięczy wektorami napięcia strony górnej i dolnej tej samej fazy.
67. Grupa połączeń w transformatorach.
Uzwojenia górnego napięcia łączy się zwykle w gwiazdę (Y) lub w trójkąt (T), uzwojenia dolnego napięcia - w gwiazdę (y), trójkąt (d) lub zygzak (z). Uzwojenie w zygzak stosuje się przy niesymetrycznych obciążeniach; uzwojenie każdej fazy podzielone jest na dwie części, umieszczone na różnych kolumnach. Występujące wówczas niesymetryczne obciążenia uzwojenia wtórnego jest mniej niesymetryczne dla uzwojenia pierwotnego.
68. Warunki współpracy równoległej transformatorów.
PRACA RÓWNOLEGŁA TRANSFORMATORA - uzwojenia pierwotne tych transformatorów przyłączone są do jednych sił zbiorczych (zasilane są z jednej linii) a ich uzwojenia wtórne do drugich sił zbiorczych.
WARUNKI PRACY RÓWNOLEGŁEJ:
1) jednakowe napięcia pierwotne i wtórne w stanie jałowym, jednakowe przekładnie (tolerancja +-0,5%). Gdyby napięcia po stronie wtórnej nie były takie same to w stanie jałowym popłynąłby prąd wyrównawczy w wyniku występującej różnicy napięć. Przy obciążeniu prąd wyrównawczy nakładałby się na prąd obciążenia.
2) jednakowe grupy połączeń transformatorów trójfazowych. Transformatory połączone równolegle muszą mieć po stronie pierwotnej i wtórnej jednakowe pokrywające się gwiazdy napięć fazowych. Wówczas między zaciskami transformatora przyłączonymi do wspólnych sił zbiorczych nie będzie różnicy potencjałów i nie popłynie prąd wyrównawczy.
3)jednakowe napięcia zwarcia (tolerancja+-10%). Napięcia zwarcia transformatora decyduje o spadku napięcia w transformatorze podczas obciążenia. Transformator o mniejszym napięciu zwarcia obciąża się więcej od transformatora połączonego równolegle o większym napięciu zwarcia, istnieje niebezpieczeństwo przeciążenia.
4) jednakowy stosunek reaktancji zwarcia do rezystancji zwarcia.![]()
69. Regulacja napięcia w transformatorach.
Dla otrzymania na odbiorniku możliwie stałego napięcia dokonujemy regulacji napięcia w transformatorze polegającej na zmianie przekładni. Najczęściej regulacja tzw. odczepami odbywa się po stronie górnego napięcia. ![]()
; ![]()
.
Stosuje się dwie metody regulacji napięcia w transformatorach: w stanie beznapięciowym i pod obciążeniem. Obie metody polegają na zmianie przekładni przez zmianę liczby zwojów w uzwojeniu o wyższym napięciu (występują tu mniejsze prądy)
70. Rodzaje pól magnetycznych występujących w maszynach elektrycznych.
a) stałe pole magnetyczne - oś jest nieruchoma, pole to wytwarza się za pomocą nieruchomych magnesów trwałych lub uzwojenia zasilanego prądem stałym.
b)pole zmienne - pole o nieruchomej osi wg układu odniesienia lecz o zmiennej w czasie wartości i zwrocie. Pole takie wytwarza uzwojenie zasilane prądem przemiennym.
c) pole wirujące - pole, którego oś wiruje względem układu odniesienia. Zwrot na tej osi jest stały, a wartość stała (pole wirujące kołowe) lub zmienna (pole wirujące eliptycznie).
71. Wytwarzanie pola wirującego.
Zasilamy 3 uzwojenia z sieci trójfazowej o kolejności zgodnej 1,2,3 wobec tego indukcje magnetyczne wytwarzane przez pole poszczególnych faz w szczelinie powietrznej wyrażają się:
![]()
![]()
![]()
- pole wirujące
![]()
- podziałka biegunowa
![]()
r - promień stojana
p - liczba par biegunów
Pole wypadkowe wiruje w przestrzeni ze stałą prędkością kątowa w.
Amplituda pola wypadkowego ma wartość stałą równą 3/2 amplitudy składowej.
Kierunek wirowania pola wirującego zależy przy określonym rozmieszczeniu uzwojeń poszczególnych faz od kolejności faz prądu.
Prędkość wirowania pola zależy od częstotliwości prądu zasilającego oraz liczby par biegunów p:
![]()
[Obr/s]
Położenie osi pola wirującego jest zgodne z położeniem osi tej fazy, której w danej chwili prąd jest w amplitudzie.
72. Budowa i rodzaje silników asynchronicznych.
Budowa:
stojan - sprasowany pakiet blach ze stali elektrotechnicznej prądnicowej uformowany w postaci wydrążonego walca z wyciętymi na wewnętrznej części żłobkami i osadzony sztywno w kadłubie silnika najczęściej odlewanego z żeliwa.
Tabliczka zaciskowa - wyprowadzone są na nią początki i końce poszczególnych uzwojeń fazowych co ułatwia kojarzenie uzwojeń fazowych stojana w gwiazdę lub w trójkąt.
Wirnik - odpowiednio sprasowany i osadzony sztywno na wale pakiet blach z naciętymi na zewnętrznej części żłobkami. Żłobki wirnika i połączenia czołowe są zazwyczaj zalewane aluminium.
Rodzaje:
z wirnikiem klatkowym- zwarte
z wirnikiem pierścieniowym
Silnik asynchroniczny trójfazowy składa się z nieruchomej części zwanej stojanem o kształcie walca wydrążonego oraz części obracającej się zwanej wirnikiem o kształcie walca kołowego umocowanego na wale. Dla zmniejszenia strat na prądy wirowe zarówno stojan, jak i wirnik wykonuje się z blach elektrotechnicznych o grubości 0,5mm.
Uzwojenia stojana łączymy w gwiazdę lub w trójkąt. Uzwojenia wirników mogą być zwarte (silniki klatkowe) lub rozwarte połączone w gwiazdę początki wprowadzone do 3ech pierścieni (silniki pierścieniowe).
Pod wpływem zmian strumienia magnetycznego wytwarzanego przez stojan w przewodach wirnika indukują się siły elektromotoryczne, podobnie jak w transformatorze.
![]()
Jeżeli uzwojenie wirnika jest zamknięte, wówczas pod wpływem indukowanej SEM w uzwojeniu wirnika płynie prąd. Kierunek prądu zgodny jest z SEM w wirniku.
F=BIl
73. Poślizg silnika asynchronicznego.
![]()
n1 -prędkość wirowania pola magnetycznego
n2 -prędkość wirowania wirnika
74. Schemat zastępczy silnika asynchronicznego.
75. Bilans mocy silnika asynchronicznego.
![]()
-moc czynna pobierana ze źródła ; ![]()
-straty w uzwojeniu stojana , ![]()
-straty w stali stojana , ![]()
- moc oddawana do silnika , ![]()
- straty mocy w uzwojeniu silnika , ![]()
- moc przekazywana na wał silnika , ![]()
- straty mocy w stali wirnika , ![]()
- straty mechaniczne (tarcie w łożyskach i straty wentylacyjne ,P2- moc oddawana na wale silnika
79. Rozruch silników pierścieniowych.
n=0; ![]()
Jeżeli włączymy silnik do sieci przy zwartych pierścieniach to popłynie prąd w rozruchu przekraczający nawet 8-krotnie wartość prądu znamionowego.
Pomimo dużego prądu ruchowego moment rozruchowy silnika jest mały, gdyż współczynnik mocy jest mały.
![]()
Do obwodu wirnika w okresie rozruchu włącza się rozrusznik spełniający podwójną rolę:
1) zwiększa moment rozruchowy, bo poprawia współczynnik mocy
2) zmniejsza prąd rozruchowy ze względu na wzrost impedancji obwodu.
Rezystancję rozrusznika dobieramy, aby prąd rozruchowy wynosił 1,5-2,2 prądu znamionowego.
80. Rozruch silników zwartych - klatkowych.
Rezystancja R2 klatki wirnika jest tak dobrana aby moment rozruchowy wynosił
Mr=(0,8-1,2)Mn.
1) ROZRUCH BEZPOŚREDNI polega na włączeniu uzwojenia stojana na pełne napięcie znamionowe sieci. Wadą tego sposoby rozruchu jest duży prąd rozruchowy.
I1r=(4-8)I1n.
Ze względu na duży prąd rozruchowy bezpośrednio do sieci włącza się silniki o mocy nie przekraczającej 4,5kV.
Dla ograniczenia prądu rozruchu w silnikach klatkowych konieczne jest obniżenie napięcia fazowego na stojanie. Możemy to uzyskać przez zastosowanie:
- przez zastosowanie rezystorów dodatkowych w obwodzie stojana
- autotransformatora obniżającego napięcie stojana
- przełącznika gwiazda-trójkąt, który łączy na okres rozruchu uzwojenia stojana w gwiazdę, następnie przełącza je w trójkąt. W ten sposób stosuje się je do silników średniej mocy do 20kV.
2) ROZRUCH ZA POMOCĄ PRZEŁĄCZNIKA GWIAZDA-TRÓJKĄT:
Ze względu na moment rozruchowy wynoszący 20-30% momentu znamionowego przełącznik gwiazda-trójkąt można stosować tylko przy lekkim rozruchu. Dla uzyskania dużego momentu rozruchowego skonstruowano silniki dwuklatkowe oraz głębokożłobkowe, w których wykorzystano zjawisko wypierania prądów w przewodach przez zmienne pole magnetyczne.
Silniki dwuklatkowe buduje się zazwyczaj dla mocy średnich 20-50kV, natomiast dla mocy mniejszych silniki głębokożłobkowe.
W silnikach głębokożłóbkowych uzyskuje się zwiększoną rezystancję wirnika przy rozruchu wskutek wypierania prądu w prętach ułożonych w głębokich żłobkach. Pręty są prostokątne o małej szerokości i dużej wysokości (15-20 X większej od szerokości). W silnikach głębokożłóbkowych moment rozruchowy:
Mr=(1,1-1,9)Mn
Prąd pobierany z sieci:
I1r=(3,5-In)In
81. Sposoby regulacji prędkości obrotowej silników asynchronicznych.
![]()
s- poślizg
f - częstotliwość
p - liczba par biegunów
Przy zmianie poślizgu s spowodowanym włączeniem rezystora regulacyjnego do obwodu wirnika
1) ![]()
Regulacja w dół. Wzrostowi poślizgu odpowiada liniowy wzrost mocy elektrycznej w obwodzie wirnika, na którą składają się straty w uzwojeniu wirnika i na rezystancji regulatora.
2) przy zmianie par biegunów p uzwojenia stojana, wykonuje się w ten sposób aby można było je przełączać. Jest to regulacja skokowa. Sprawność silników przy tym sposobie regulacji jest wysoka. Silniki wielobiegowe mają większe gabaryty niż silniki zwykłe. Ten sposób regulacji stosuje się tylko w silnikach klatkowych.
3) Regulacja odbywa się przez zmianę częstotliwości zasilającej f stojan. Wymaga ona jednoczesnej regulacji napięcia zasilającego silnik w celu utrzymania stałego strumienia.![]()
przy M=const.
82. Hamowanie silnika indukcyjnego.
Hamowanie elektryczne jest konieczne w celu szybkiego zatrzymania silnika będącego ruchu lub w celu przejścia od jednego stanu pracy do drugiego.
1) Hamowanie przeciwprądowe - występuje wówczas, gdy wirnik wiruje w kierunku przeciwnym do kierunku wirowania pola. Zmianę kierunku wirowania pola osiąga się przez zmianę kolejności dwóch faz uzwojenia stojana.
![]()
![]()
![]()
W momencie zmiany kierunku wirowania pola siła elektromotoryczna w wirniku jest większa niż w chwili rozruchu, co powoduje zwiększenie prądu w obwodzie wirnika. Dla jego ograniczenia w obwód wirnika wpina się rezystory dodatkowe, które mają wpływ na wartość momentu hamującego. Przy prędkości bliskiej 0 należy odłączyć silnik od sieci gdyż zmieni kierunek wirowania.
2) Hamowanie prądnicowe - występuje, gdy wirnik jest napędzany przez maszynę roboczą w kierunku zgodnym z kierunkiem wirowania pola z prędkością nadsynchroniczną (s<0, n>ns)
ten sposób hamowania stosuje się w urządzeniach dźwigowych.
3) Hamowanie dynamiczne - polega na odłączeniu od sieci uzwojenia stojana pracującego silnika i zasileniu go prądem stałym. W uzwojeniach wirującego dzięki bezwładności wirnika powstaje SEM pod wpływem tej siły w zamkniętym obwodzie wirnika płynie prąd, który oddziaływując na pole stojana wywołuje moment hamujący.
83. Wpływ wahań napięcia na pracę silnika.
Jeżeli napięcie na zaciskach silnika jest mniejsze od znamionowego to:
1) sprawność silnika zmniejsza się;
2) współczynnik mocy cos zwykle się zwiększa;
3) przeciążalność, moment maksymalny i rozruchowy zmniejszają się co najmniej proporcjonalnie do drugiej potęgi zmian napięcia;
4) prąd rozruchowy silnika maleje;
5) przyrosty temperatury zwykle wzrastają
Jeżeli napięcie na zaciskach silnika jest większe od znamionowego to:
1) sprawność zwiększa się
2) cos zmniejsza się znacznie;
3) poślizg s maleje;
4) prąd stojana przy obciążeniu znamionowym zwykle się zmniejsza;
5) przeciążalność, moment maksymalny i rozruchowy zwiększają się nieco bardziej niż do drugiej potęgi zmian napięcia;
6) prąd rozruchowy zwiększa się nieco bardziej niż napięcie;
7) przyrosty temperatury na ogół maleją.
84. Silniki jednofazowe. Rodzaje, charakterystyki.
W stojanie silnika jest uzwojenie jednofazowe, może mieć jedno lub więcej par biegunów. W obwodzie powstaje pulsujący strumień magnetyczny, który można rozłożyć na 2 strumienie wirujące w przeciwnych kierunkach z prędkością synchroniczną dla danej liczby par biegunów:
![]()
Każdy z tych strumieni wytwarza własny moment obrotowy. Dla n=0 momenty rozruchowe pochodzące od obu pól wirujących są sobie równe i przeciwnie skierowane, wskutek czego moment wypadkowy =0.
![]()
Jeżeli wytrącimy wirnik silnika z położenia równowagi, wówczas wirnik zacznie się obracać w kierunku zapoczątkowanego ruchu, w zależności od obciążenia ustali się punkt pracy przy niewielkim poślizgu, podobnie jak w silniku trójfazowym.
Aby usunąć wadę silnika - brak momentu rozruchowego stosuje się w stojanie drugie uzwojenie zwane fazą rozruchową. Obydwa uzwojenia przesunięte są względem siebie o kąt 90. prądy płynące w tych uzwojeniach powinny być przesunięte w fazie względem siebie o ¼ okresu tzn wektory przesunięte o kąt 90.
Dla osiągnięcia tego celu stosuje się 2 rozwiązania silników jednoklapkowych:
- silniki z fazą rozruchową kondensatorową
- silniki z fazą oporową.
85. Silnik uniwersalny.
Silnik szeregowy, może być zasilany prądem stałym i jednofazowym. Od silnika prądu stałego różni się tym, że obwód stojana wirnika wykonany jest z blach ze względu na występujące straty na prądy wirowe.
86. Silnik liniowy.
Jako silnik liniowy rozumie się silnik, w którym przemiana energii elektrycznej w mechaniczną następuje bez udziału elementów wirujących. Silnik umożliwia napęd maszyny ruchem posuwistym. Zbudowany jest z induktora i bieżnika. W silniku liniowym rozróżnia się część pierwotną wtórną, związane jest to z kierunkiem przepływu energii. Bardziej rozpowszechniona jest konstrukcja, w której ruchomą częścią jest pierwotna zwana induktorem, a część wtórna zwana bieżnikiem.
Induktor może być dwuczęściowy (dwustronny) lub jednostronny (jednoczęściowy, wówczas część wtórna powinna zawierać materiał ferromagnetyczny). W silniku liniowym występuje pole wędrujące, przemiana energii elektrycznej doprowadzonej do uzwojenia induktora powoduje powstanie siły pociągowej i prędkości liniowej.
Regulacja prędkości liniowej jest możliwa jak w silniku klatkowym. Najdogodniejsza jest słynna i ekonomiczna regulacja za pomocą jednoczesnego sterowania częstotliwości i napięcia.
Silniki liniowe stosuje się do napędu suwnic, przenośników taśmowych, bram, stołów, obrabiarek oraz w napędzie jednoszynowych pociągów.
87. Budowa maszyny prądu stałego.
Każda maszyna składa się z nieruchomego stojana oraz wirnika. Jedna z tych części wytwarza pole magnetyczne i nazywana jest magnesicą, w drugiej nazywanej twornikiem wzbudza się SEM.
Silniki prądu stałego stosuje się w układach napędowych, w których jest wymagany duży moment rozruchowy oraz znany zakres regulacji prędkości.
113. sposoby ochrony przeciwporażeniowej:
Środki ochrony podstawowej:
- Izolacja części czynnych obwodów elektrycznych
- Ogrodzenia (przegrody) i obudowy (osłony)
- Bariery (przeszkody)
- Umieszczenie części czynnych obwodów poza zasięgiem ręki.
Środki ochrony dodatkowej:
- zerowanie ochronne
- uziemienie ochronne
- przeciwporażeniowe wyłączniki ochronne
- obniżenie napięcia roboczego
- zastosowanie urządzenia II klasy ochronności lub izolacji równoważnej
- izolowanie stanowiska pracy
- połączenia wyrównawcze
- separacja obwodu odbiornika od sieci zasilającej
Wyszukiwarka
Podobne podstrony:
Laboratorium Elektrotechniki MONIKA, SPRAWOZDANIA czyjeś
20-28 mini, SPRAWOZDANIA czyjeś
Laboratorium z Elektrotechniki ćwicz.7, SPRAWOZDANIA czyjeś
ELEKTRA EGZAMIN, SPRAWOZDANIA czyjeś
Lab Elektroniki - 4 PROTOKÓŁ, SPRAWOZDANIA czyjeś
29-37 mini, SPRAWOZDANIA czyjeś
38-44 mini, SPRAWOZDANIA czyjeś
Zabezpieczenia silników elektrycznych za pomocą zespołu autom, SPRAWOZDANIA czyjeś
ELEKTRA7, SPRAWOZDANIA czyjeś
Laboratorium z Elektrotechniki ćwicz.3 wersja DRUGA, SPRAWOZDANIA czyjeś
ELEKTROTECHNIKA2, SPRAWOZDANIA czyjeś
PRZEWODNOŚĆ ELEKTRYCZNA, SPRAWOZDANIA czyjeś
44 sprawozdanie czyjeś, Politechnika Rzeszowska, Elektrotechnika, semestr 2, Fizyka Lab, Sprawozdani
Laboratorium z Elektrotechniki ćwicz.13, SPRAWOZDANIA czyjeś
Elektrotechnika ćwiczenie 6 - protokół, SPRAWOZDANIA czyjeś
Tabelka Elektrpo, SPRAWOZDANIA czyjeś
pomoc2cd(1), SPRAWOZDANIA czyjeś
Budowa kontenera C, SPRAWOZDANIA czyjeś
więcej podobnych podstron