Wydział Inżynierii Mechanicznej i Robotyki
TEORIA MASZYN I MECHANIZMÓW PRECYZYJNYCH
ANALIZA MECHANIZMU 1A
Marcin Matras, grupa 25, Mechatronika
Temat zadania:
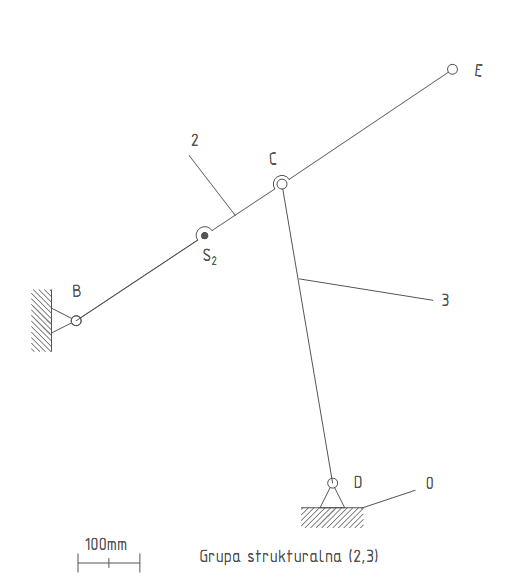
Utworzono mechanizm czworoboku przegubowego zgodnie z zadanym schematem
dane:
m2=6kg
JS2=0,5833kg*m2
P2=150N
M3=150Nm
![]()
=![]()
1. ANALIZA STRUKTURALNA MECHANIZMU
![]()
![]()
![]()
![]()
Ruchliwość mechanizmu jest równa 1.
Mechanizm jest klasy V.
![]()
![]()
![]()
n=2
p5=3
wgr=0
grupa strukturalna klasy 2
Analizowany łańcuch kinematyczny jest mechanizmem kl. 2
2.ANALIZA KINEMATYCZNA MECHANIZMU METODĄ GRAFOANALITYCZNĄ
Obliczenia:
kv = 
-podziałka prędkości

- kierunek wektora prostopadły do |AB|
Obliczam prędkość punktu C:
![]()
(1) VC- ┴ |CD|; VB- ┴ |AB|; VCB- ┴ |BC|
![]()
(2) VEB- ┴ |BE|
PLAN PRĘDKOŚCI:
Obliczono prędkości:
VE= k*( VE)=2,757 [m/s]
VC= k*( VC)=2,033 [m/s]
VS2= k*( VS2)=3,024 [m/s]
VCB= k*( VCB)=2,97 [m/s]
VEB= k*( VEB)=5,77[m/s]
VS2B= k*( VS2B)=2,09 [m/s]
Obliczono prędkośc kątowe poszczególnych członówi:
WYZNACZANIE PRZYSPIESZEŃ:
Obliczono aB, aC, aCB:
![]()
![]()
![]()
Równanie przyspieszeń punktu C:
![]()
,![]()
║ CD; ![]()
┴ CD ; ![]()
║ AB; ![]()
║ BC ; ![]()
┴BC
Z planu odczytano:
![]()
![]()
![]()
Równanie przyspieszenia punktu E:
![]()
(3) ![]()
║ EB; ![]()
┴ EB
![]()
![]()
Z planu odczytano:
![]()
Równanie przyspieszenia punktu S2:
![]()
(3) ![]()
║ BC; ![]()
┴ BC
![]()
![]()
Z planu odczytano:
![]()
Obliczono przyspieszenia kątowe:
![]()
![]()
![]()
3.ANALIZA KINEMATYCZNA METODĄ ANALITYCZNĄ
3.ANALIZA KINEMATYCZNA PRZY POMOCY PROGRAMU SAM
3.1 Utworzono mechanizm w programie SAM
3.2 Utworzono wykres prędkości oraz przyspieszeń poszczególnych punktów
Porównanie wyników analizy kinematycznej
|
Metoda grafoanalityczna |
Metoda analityczna |
Wyniki z prgramu SAM |
|
1 |
VB |
4,2 |
4,2 |
4,2000 |
2 |
VC |
2,0934 |
2,0315 |
2,1310 |
3 |
VE |
2,5975 |
2,6580 |
2,6975 |
4 |
VS2 |
2,0921 |
2,114 |
2,121 |
5 |
ω2 |
3,7125 |
3,72 |
- |
6 |
ω3 |
2,0331 |
2,121 |
- |
7 |
aB |
50,4 |
50,4 |
50,400 |
8 |
aC |
4,133 |
4,181 |
4,2141 |
9 |
aE |
85,33 |
85,92 |
86,512 |
10 |
aS2 |
52,231 |
52,612 |
53,097 |
11 |
ε2 |
51,334 |
51,312 |
-1935,01 |
12 |
ε3 |
60,231 |
60,248 |
- |
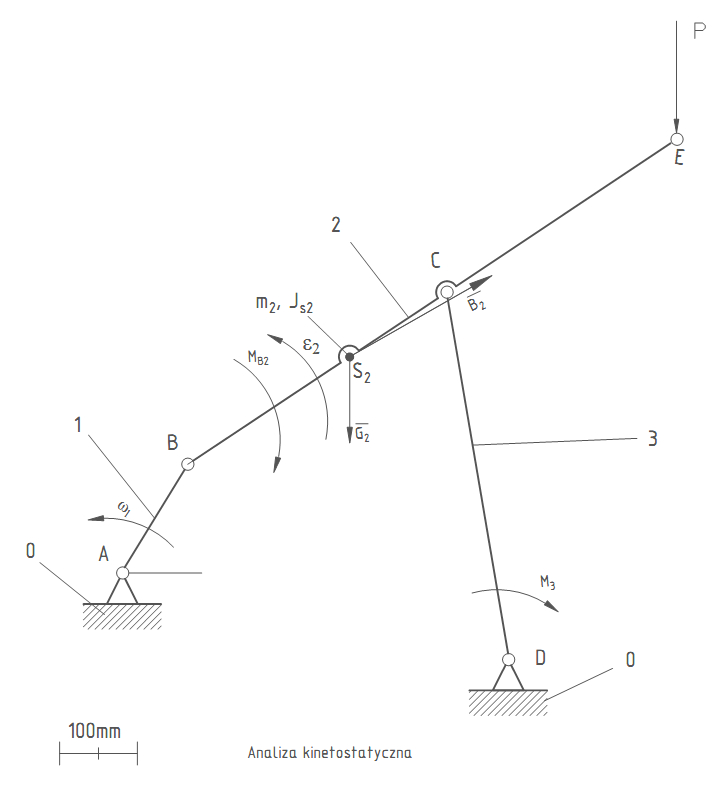
6. ANALIZA KINETOSTATYCZNA
Dane:
P2 = 150 N
M3=150Nm
IS2=0,58333kg*m2
6.2 Obliczono siłę cięzkości G2, siłę bezwładności ![]()
oraz moment od sił bezwładności ![]()
:
G2=6kg*9,81m/s2=58,26N
![]()
= -m2![]()
![]()
= m2![]()
= 6kg*52,3 m/s2
![]()
= 313,98 [N]
![]()
= -IS2![]()
![]()
= IS2ε2 = 0,58333*60,23m/s2
![]()
== 35 [Nm]
6.3 Obliczono siły działające na człony 2 i 3
6.3.1 Reakcje ![]()
i ![]()
podzielono na składowe styczne (![]()
,![]()
) i normalne(![]()
,![]()
)
6.3.2 Obliczono wartość siły ![]()
oraz ![]()
:
![]()
=![]()
* BC + G2h2 + B2h1- Ph3-MB2 = 0
![]()
= ![]()
![]()
= ![]()
![]()
= 56,68 [N]
![]()
=![]()
* CD - M3 = 0
![]()
= ![]()
![]()
= ![]()
= 150 [N]
Równanie posiada teraz dwie niewiadome, którymi są wartości sił ![]()
i ![]()
6.4.4 Równanie równowagi sił:
![]()
+ ![]()
+ ![]()
+![]()
+ ![]()
+ ![]()
+ ![]()
= 0
Przyjęto podziałkę kR = 3 
Wykreślne rozwiązanie równania równowagi sił.
6.4.5 Obliczono wartość wyznaczonych sił ![]()
i ![]()
:
Rn12 =k*(R12) =3 
R12=491,31 [N]
R12 =k*(R12) =3 
R12=512,67 [N]
Rn03 =k*(R12) =3 
R n03=424,02 [N]
R03=k*(R03) =30 
R03 = 447,15 [N]
6.4.6 Obliczono wartość siły R32
![]()
+ ![]()
+![]()
+ ![]()
= 0
Wykreślne rozwiązanie równania równowagi sił
![]()
=k*(![]()
)=3 
![]()
= 600,63 [N]
6.5 Dokonano analizy sił działających na człon napędzający
Równania równowagi sił:
![]()
+ ![]()
= 0
![]()
= - ![]()
![]()
= 491,31 [N]
6.5.1 Obliczeno wartość momentu równoważącego MR1
MR1 - R21*h4 = 0
MR1 = R21*h4
MR1 = 491,31 * 11,78mm = 5,7876 [Nm]
7.ANALIZA KINETOSTATYCZNA METODĄ MOCY CHWILOWYCH
Obliczono moment równoważący:
![]()
MR1ω1 + P2VEcos(α1) + G2VS2cos(α3)+ B2VS2cos(α2) + MB2 ω2 + M3 ω3 = 0
MR1 = 
MR1= -
MR1= -5,8421 [Nm]
7.ANALIZA KINETOSTATYCZNA PRZY POMOCY PROGRAMU SAN
7.1 Mechanizm utworzony w programie SAM
7.2 Utworzono wykresy zależności sił działających na poszczególne punkty od czasu
Porównanie wyników analizy kinematycznej
|
Metoda grafoanalityczna |
Metoda mocy chwilowych |
Program SAM |
|
1 |
P01 |
491,31 |
- |
491,14 |
2 |
P12 |
491,31 |
- |
491,14 |
3 |
P32 |
600,63 |
- |
600,12 |
4 |
P03 |
149,06 |
- |
149,12 |
5 |
B2 |
313,98 |
- |
313,32 |
6 |
Mzr1 |
-5,7876 |
-5,7421 |
- |
Wyszukiwarka
Podobne podstrony:
Projekt TMM 1A(1), Mechatronika AGH IMIR, rok 2, sprawozdania, TMM, inne projekty, Projekt 1a
Dynamiczne badanie przetworników I i II rzędu, Mechatronika AGH IMIR, rok 2, sprawozdania, metrologi
metrologia 78, Mechatronika AGH IMIR, rok 2, sprawozdania, metrologia
TMIM, Mechatronika AGH IMIR, rok 2, sprawozdania
PKM WAŁ, Mechatronika AGH IMIR, rok 2, sprawozdania, wałek
Sprawko metro, Mechatronika AGH IMIR, rok 2, sprawozdania, metrologia, METROLOGIA
własności dynamiczne przetworników pierwszego rzędu 2, Mechatronika AGH IMIR, rok 2, sprawozdania, m
charakterystyki 2 2, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
metr-koło 4, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
STAT.KONTR.JAKOŚCI, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
sciaga 2(1), Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
wnioski 2 2, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
TMM - Projekt 6B(1), Mechatronika AGH IMIR, rok 2, TMM, 1A, 2A, 3A, 4B, 5B, 5A, 6A, 7B
Tmm sprawko 1, Mechatronika AGH IMIR, rok 2, TMM
tablice terrma2, Mechatronika AGH IMIR, rok 2, TMM, tmm
tablice terma, Mechatronika AGH IMIR, rok 2, TMM, tmm
tabela, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
TMM Laboratoria, Mechatronika AGH IMIR, rok 2, TMM
więcej podobnych podstron