Ms4 = 1000 kGcm
z3 =28 z4 = 80 m = 4 mm z2 = 81 β = 20o
d4 = 344,8 mm Ms4 = 245 Nm
α = 20o d3 = 112 mm Ms = 475,6 Nm
α = 45o Ms = 1689,5 Nm d2 = 344,8 mm β = 20o
Pr2 = 1042N Pr3 = 3000N Pw = 356N a = 70 mm b = 200 mm c = 90 mm e = 172,5 mm
a = 70 mm Ray = 2046 N
Ray = 2046 N Pr2 = 1042N a = 70 mm b = 200 mm
Ray = 2046 N Rcy = 1996 N Pr2 = 1042N a = 70 mm b = 200 mm
a = 70 mm b = 200 mm c = 90 mm P02 = 980N P03 = 3000N
a = 70 mm Ray = -274,05 N
a = 70 mm b = 200 mm Ray =-274,05 N P02 = 980N
a = 70 mm b = 200 mm c = 90 mm Ray =-274,05 N Rcy = 4254,05 N P02 = 980N
Ray =-274,05 N
Ray =-274,05 N P02 = 980N
Ray =-274,05 N P02 = 980N Rcy = 4254,05 N a = 70 mm b = 200 mm
Ray = 2046 N Pr2 = 1042N
Ray = 2046 N Pr2 = 1042N
Ray = 2046 N Pr2 = 1042N Rcy = 1996 N
α = 0,43 Ms = 1689,5 Nm
Mw0=0 Nm Mw0,03=41,29Nm Mw0,06=82,57Nm Mw0,07=471,09 Nm Mw0,11=436,17 Nm Mw0,15=408,34 Nm Mw0,19=389,2 Nm Mw0,23=380,15 Nm Mw0,27=381,82 Nm Mw0,29=339,41 Nm Mw0,32=169,71Nm Mw0,36=0Nm
kg0=108,75MPa Mz0=0 Nm Mz0,03=41,29 Nm Mz0,06=82,57 Nm Mz0,07=1238,9 Nm Mz0,11=1226,1Nm Mz0,15=1216,5Nm Mz0,19=1210,2Nm Mz0,23=1207,3 Nm Mz0,27=1207,8Nm Mz0,29=1195,1Nm Mz0,32=1158,4Nm Mz0,36=1145,9Nm
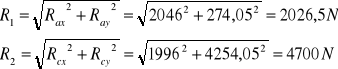
Rax = 2046 N Rcx = 1996 N Ray =-274,05 N Rcy = 4254,05N Pw= 356 N
l = 6 -liczba lat z = 3- liczba zmian
V = 1 R2= 4700 N X = 1 Y = 0
q =3 dla łożysk kulkowych Lh = 29200 h n=1500obr/min
R1 =2026,5 N Pw= 356 N V = 1 C0 = 64000 N
R1 = 2026,5N Pw= 356 N V = 1 X = 0,56 Y = 2,30
Ms =1689,5 Nm d·=60 mm s = 7,2 mm z = 1 ilość wpustów pdop = 253 MPa
M0,08=471,09 S = 7,2 mm d = 60 mm b = 20 mm kg0=108,75 MPa
M031=381,82 S = 72 mm d = 60 mm b = 20 mm kg0=108,75MPa
Mz0=0 Nm Mz0,03=41,29 Nm Mz0,06=82,57 Nm Mz0,07=1238,9 Nm Mz0,11=1226,1Nm Mz0,15=1216,5Nm Mz0,19=1210,2Nm Mz0,23=1207,3 Nm Mz0,27=1207,8Nm Mz0,29=1195,1Nm Mz0,32=1158,4Nm Mz0,36=1145,9Nm
d0,03 =15,6mm d0,07=47,6 mm d0,15=48,6 mm d0,23=48,3 mm d0,27=48,3 mm d0,29=48,2 mm d0,31=47,7 mm d0,36=47,7 mm
q*0,03=8,87·10-9 q*0,08=5,01·10-9 q*0,15=3,23·10-9 q*0,23=3,09·10-9 q*0,29=3,46·10-9 q*0,31=3,50·10-9
S1=13,3·107 N/m2 S2=34,7·107 N/m2 S3=28,8·107 N/m2 S4=25,3·107 N/m2 S5=19,7·107 N/m2 S6=7,0·107 N/m2
S1=13,3·107 N/m2 S2=34,7·107 N/m2 S3=28,8·107 N/m2 S4=25,3·107 N/m2 S5=19,7·107 N/m2 S6=7,0·107 N/m2 R1=56,6·107 N/m2 R2=72,1·107 N/m2
m = 10 Mc=2,8·10 7 N/m2 E=2,1·105 MPa
R1 = 56,6·107 N/m2 R2= 72,1·107 N/m2
Rm = 520 MPa Dla stali C35 Mg=102,4Nm
Zg0=208 MPa ε=0,81
αga=129,6 MPa
Zg0=208 MPa
Ms =475,6 Nm
Zss=124,8MPa
ε=0,91 τs=317
|
B 10/II
Przeliczenie wartości Ms2 na kNm
Obliczenie momentu skręcającego na przekładni pasowej
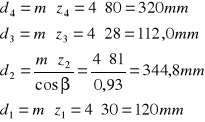
Obliczenie średnic kół z4 z3 z2 i z1
Obliczenie momentu skręcającego na przekładni zębatej [ z1 z2 ]
Ms3 = Ms - Moment skręcający na wale
Obliczenie sił występujących na kole z3
Obliczenie sił działających na koło z2
P0 - siła obwodowa Pw - siła poosiowa Pr - siła promieniowa
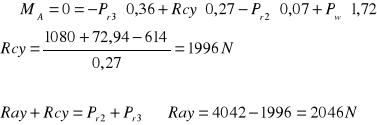
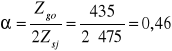
Obliczenie wartości momentów zginających wału
W tym celu wał rozpatrujemy jako belkę podpartą w łożyskach i obciążonej siłami. Każdą siłę rozpatrujemy w płaszczyźnie jej działania.
Rozpatrujemy płaszczyznę poziomą xz
Obliczanie momentów gnących
0 ≤ z ≤ a
M(z) = Ray z M(0) = 2046 · 0 kNm M(0,07) = 2046 · 0,07= 143,72 Nm
a ≤ z ≤ a +b
M(z) = Ray z- Pr2 (z-a) - Pw · e M(0,08) = 2046 · 0,07 - 0 - 614 = -470,8 Nm M(0,23) = 2046 · 0,27 - (1042·0,2) - 614 = -270 Nm
a +b≤ z ≤ a + b + c
M(z) = Ray z- Pr2 (z-a) + Rcx (z-[a+b]) - Pw · e
M(0,23) = 2046 · 0,27 - (1042·0,2) + 1996 · 0 - 614 = = -270 Nm M(0,31) = 2046 · 0,36 - (1042·0,29) + 1996 · 0,09 - 614 = 0 Nm
Rozpatrujemy płaszczyznę yz
Obliczanie momentów gnących
0≤ z ≤ a
M(z) = Ray z
M(0) = -274,05 · 0 = Nm M(0,08) = = -274,05 · 0,08 = - 36,2Nm
a ≤ z ≤ a + b
M(z) = Ray z - P02 (z-a) M(0,08) = -274,05 · 0,07 - 980 · 0= -32 Nm M(0,23) = -274,05 · 0,27 - 980 · 0,2= -319,5 Nm
a + b≤ z ≤ a + b + c
M(z) = Ray z- P02 (z-a)-Rcy (z-[a+b]) M(a+b) = (-274,05 · 0,27) -980*(0,27- 0,07)+4254,05 · 0 = -270 Nm M(a+b+c) = -(-274,05 · 0,36) -980*(0,36- 0,07) + 4254,05 · (0,36-0,27) = 0 Nm
Wyznaczenie momentów gnących w kolejnych punktach wału:
Płaszczyzna yoz:
M(z) = Ray·z M(0) = -274,05 · 0 = 0 Nm M(0,03) = -274,05 · 0,03 = -5,48 Nm M(0,06) = -274,05 · 0,06 = -10,96 Nm M(0,07) = -274,05 · 0,07 = -19,18 Nm
a ≤ z ≤ a + b
M(z) = Ray·z - P02 · (z-a) M(0,07) = -274,05 · 0,07 - 980 ·0 = -19,18 Nm M(0,11) = -274,05 · 0,11 - 980 ·0,07 = -69,34 Nm M(0,15) = -274,05 · 0,15 - 980 ·0,08 = -119,5 Nm M(0,19) = -274,05 · 0,19 - 980 ·0,12= -169,6 Nm M(0,23) = -274,05 · 0,23 - 980 ·0,16 = -219,83 Nm M(0,27) = -274,05 · 0,27 - 980 ·0,2 = -270 Nm
a + b≤ z ≤ a + b + c
M(z) = Ray · z - P02(z-a) + Rcy[z-(a+b)]
M(0,27) = -274,05 · 0,27 - 980 ·0,2 + 4254,05 · 0 =
M(0,32) = -274,05 · 0,32 - 980 ·0,25 + 4254,05 · 0,05 =
M(0,36) = -274,05 · 0,36 - 980 ·0,29 + 4254,05 · 0,09 =
Płaszczyzna xoz:
M(z) = Ray · z M(0) = 2046 · 0= 0 Nm M(0,03) = 2046 · 0,03 = 40,92 Nm M(0,06) = 2046· 0,06 = 81,84 Nm M(0,08) = 2046 · 0,08 = 143,22 Nm
M(z) = Ray · -Pr2 (z-a) - Pw · e M(0,07) = 2046 · 0,08 - 0 - 128 = - 470 Nm M(0,11) = 2046 · 0,12 - 1042 ·0,04- 614 = - 430,62 Nm M(0,15) = 2046 · 0,15 - 1042 ·0,07- 614 = - 390,46 Nm M(0,19) = 2046 · 0,18 - 1042 ·0,10- 614 = - 350,3 Nm M(0,23) =2046· 0,21 - 1042 ·0,13- 614 = - 310,14 Nm M(0,27) = 2046 · 0,23 - 1042 ·0,15- 614 = - 269,98 Nm
M(z) = Ray · -Pr2 (z-a) +Rcy [z-(a+b)] - Pw · e
M(0,27) = 2046 · 0,26 - 1042 · 0,18 + 1996 · 0,03-614 =
M(0,32) = 2046 · 0,29 - 1042 · 0,21 + 1996 · 0,06-614 =
M(0,36) = 2046 · 0,31 - 1042 · 0,23 + 1996 · 0,08-614 =
Wyznaczenie wypadkowych momentów zginających w kolejnych punktach wału:
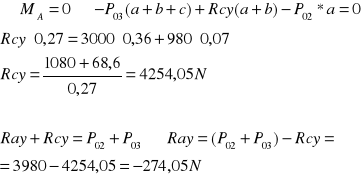
Obliczenie współczynnika redukującego naprężenia styczne do normalnych
Dla stali 40HN:
Zgo = 435 MPa Zsj = 475 MPa
Wyznaczenie momentów zredukowanych w oparciu o hipotezę Hubera
Teoretyczne średnice wału w charakterystycznych przedziałach
Przyjmuje współczynnik zapasu wytrzymałości xz = 4, a więc:
Kształtowanie wału wg wymagań technologicznych i montażowych
Średnicę wału w łożyskach przyjmuje jako większą od średnic obliczeniowych dł1 = 40 mm dł2 = 75 mm
Średnicę wału dla otworu piasty [dla obu kół zębatych] przyjmuje 48, aby była większa od średnicy obliczeniowej i możliwe było osadzenie koła bez uszkodzenia powierzchni pod łożysko dC =60 mm
Z jednej strony piasty zakładam średnicę kołnierza dk =90 mm
Dobór łożysk tocznych
Reakcja wypadkowa działająca na łożysko:
Wstępnie zakładam, że siłę Pw przejmie łożysko obciążone mniejszą siłą poprzeczną.
Obliczenie liczby godzin pracy łożysk
Określenie współczynników ft i fd
Założenie: wał pracuje w temperaturze do 150oC - ft = 1 Założenie: wał pracuje spokojnie, bez uderzeń - fd = 1
Łożysko nr 2:
V - współczynnik przypadku obciążenia, dla ruchomego wału V = 1
Obciążenie zastępcze dla łożyska 2:
Obliczenie współczynnika trwałości:
Wymagana nośność łożyska:
Z katalogu dobieram łożysko walcowe 215, dla którego C = 145000 N
Łożysko nr 1: (zakładam łożysko 6408)
Ponieważ
Wartość współczynnika X = 0,56 Z katalogu dobieram wartość współczynnika Y = 2,30
Obliczenie obciążenia zastępczego:
Wymagana nośność dynamiczna łożyska 1:
Nośność dynamiczna przyjętego łożyska 6408 wynosi 64000 N > 32782,7 N
Obliczenie połączeń piast· kół zębatych z czopem wału
Z katalogu dobieram wpust o wymiarach b x h 8 x 11 oraz głębokości s = 3,7. Dla połączenia spoczynkowego i wpustu wykonanego ze stali 40HN przyjęto pdop = 253 MPa
Rzeczywista długość wpustu:
Przyjmuje długość znormalizowaną l = 50mm
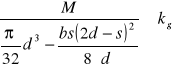
Sprawdzenie wytrzymałości na zginanie po uwzględnieniu w czopach otworów pod wpusty:
Koło zębate z2:
Koło zębate z3:
Obliczenie ugięcia wału i strzałek obrotu.
Maksymalną strzałkę ugięcia określam na podstawie wypadkowego momentu gnącego.
Wykres obciążenia fikcyjnego q*[dla punktów charakterystycznych]:
Wyznaczenie wektorów S umieszczonych w środkach ciężkości pól (rys. powyżej):
Wyznaczenie reakcji fikcyjnych:
Wyznaczenie strzałki ugięcia
Maksymalny moment fikcyjny znajduje się w punkcie C belki i wynosi:
Obliczenie kątów ugięcia w łożyskach:
Obliczenia zmęczeniowe wału:
Zakładam rzeczywisty współczynnik bezpieczeństwa
Z analizy teoretycznych przekrojów wału i przyjętego zarysu rzeczywistego wynika, ze najbardziej narażonym przekrojem jest przekrój pod łożysko nr 1.
Rzeczywisty współczynnik bezpieczeństwa wg naprężeń normalnych:
Z tablic odczytuje współczynnik wielkości przedmiotu:
Współczynnik uwzględniający działanie karbu i stan powierzchni:
Wartości
Rzeczywisty współczynnik bezpieczeństwa wg naprężeń normalnych:
Rzeczywisty współczynnik bezpieczeństwa wg naprężeń stycznych:
Z tablic odczytuje współczynnik wielkości przedmiotu:
Współczynnik uwzględniający działanie karbu i stan powierzchni:
Wartości
·
Współczynnik wrażliwości cyklu:
Rzeczywisty współczynnik bezpieczeństwa wg naprężeń stycznych
Rzeczywisty współczynnik bezpieczeństwa dla obciążeń złożonych:
Literatura:
|
Ms4 = 98 Nm
d3 = 112 mm d4 = 320 mm d2 = 344,8 mm
Ms3 = 1689,5 Nm
P03 = 3000 N Pr3 = 3000 N P3 = 3894 N
P02 = 980 N Pr2 = 1042 N Pw= 356 N
Rax = -356 N Ray = 2046 N Rcy = 1996 N
Ray = -274,05 N Rcy = 4254,05 N
Mw0=0 Nm Mw0,03=41,29Nm Mw0,06=82,57Nm Mw0,07=471,09 Nm Mw0,11=436,17 Nm Mw0,15=408,34 Nm Mw0,19=389,2 Nm Mw0,23=380,15 Nm Mw0,27=381,82 Nm Mw0,29=339,41 Nm Mw0,32=169,71Nm Mw0,36=0Nm
α = 0,46
Mz0=0 Nm Mz0,03=41,29 Nm Mz0,06=82,57 Nm Mz0,07=1238,9 Nm Mz0,11=1226,1Nm Mz0,15=1216,5Nm Mz0,19=1210,2Nm Mz0,23=1207,3 Nm Mz0,27=1207,8Nm Mz0,29=1195,1Nm Mz0,32=1158,4Nm Mz0,36=1145,9Nm
kg0=108,75MPa
d=0 Nm d0,03 =15,6mm d0,06 =19,7 mm d0,07=47,6 mm d0,11=48,6 mm d0,15=48,6 mm d0,18=48,4 mm d0,21=48,3 mm d0,23=48,3 mm d0,27=48,3 mm d0,29=48,2 mm d0,31=47,7 mm d0,36=47,7 mm
R1 = 2026,5 N R2= 4700 N
Lh = 52560 h
C = 78897,6 N
e = 1,19
P1 = 1953,64 N
l = 50mm
q*0,03= 0,0014·10-9 q*0,08=0,005·10-9 q*0,15=4,47·10-9 q*0,23=4,52·10-9 q*0,27=0,004·10-9 q*0,29=4,51·10-9 q*0,31=4,56·10-9 q*0,31=4,62·10-9
S1=13,3·107 N/m2 S2=34,7·107 N/m2 S3=28,8·107 N/m2 S4=25,3·107 N/m2 S5=19,7·107 N/m2 S6=7,0·107 N/m2
R1 = 56,6·107 N/m2 R2= 72,1·107 N/m2
Mc=2,8·107 N/m2
fc=0,13 mm
V1=0,0027 rad
V2=0,0034 rad
Zg0=208 MPa
ε=0,91
αga=129,6 MPa
Zs0=124,8 MPa
ε=0,81
τs=317MPa
|



- 15 -
Wyszukiwarka
Podobne podstrony:
Projekt TMM 1A(1), Mechatronika AGH IMIR, rok 2, sprawozdania, TMM, inne projekty, Projekt 1a
Dynamiczne badanie przetworników I i II rzędu, Mechatronika AGH IMIR, rok 2, sprawozdania, metrologi
metrologia 78, Mechatronika AGH IMIR, rok 2, sprawozdania, metrologia
TMIM, Mechatronika AGH IMIR, rok 2, sprawozdania
Sprawko metro, Mechatronika AGH IMIR, rok 2, sprawozdania, metrologia, METROLOGIA
blabla2, Mechatronika AGH IMIR, rok 2, sprawozdania, TMM
własności dynamiczne przetworników pierwszego rzędu 2, Mechatronika AGH IMIR, rok 2, sprawozdania, m
charakterystyki 2 2, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
metr-koło 4, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
STAT.KONTR.JAKOŚCI, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
sciaga 2(1), Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
wnioski 2 2, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
tabela, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
metrologia 111111b, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
charakterystyki 2 2, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
metr-koło 4, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
Teora sterowania lab2, Mechatronika AGH IMIR, rok 2, Teoria sterowania, lab2 grzybek
TSIId Mech EGZAMIN, Mechatronika AGH IMIR, rok 2, Teoria sterowania
więcej podobnych podstron