TEORIA MASZYN I MECHANIZMÓW
Tomasz Dutka
GR 8A
ROK IIA
TEMAT: ANALIZA KINEMATYCZNA I KINETOSTATYCZNA MECHANIZMU DŹWIGNIOWEGO.
Zgodnie z numerem i wariantem liczbowym zadania przyjąłem wymiary mechanizmu i położenie jak na rysunku.
AB = 300 mm ω1 = 20 s-1
BC = 600 mm φ1 = 45°
CD = 600 mm
BF = 300 mm
FE =300 mm
DS3 = 300 mm
ANALIZA STRUKTURALNA MECHANIZMU.
RUCHLIWOŚĆ I KLASA MECHANIZMU.
AB - człon napędzający
BC i CD - człony ruchome
Ruchliwość mechanizmu:
n = 3 - liczba członów
p4 = 0 - liczba par kinematycznych czwartej klasy
p5 = 4 - liczba par kinematycznych piątej klasy
w = 3n - 2p5 - p4
w = 3*3 - 2*4 - 0
w = 1
Podział mechanizmu na grupy strukturalne:
Analizowany mechanizm jest mechanizmem klasy II
ANALIZA KINEMATYCZNA MECHANIZMU
MODEL MECHANIZMU W PORGRAMIE AKM
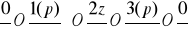
Na podstawie przeprowadzonej analizy strukturalnej ustaliłem, że model mechanizmu musi zawierać człon napędzający oraz grupę oznaczoną w programie AKM symbolem 0-0-0
Człon napędzający:
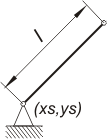
Parametry:
- xs = 0; ys = 0.1
- l = 0.3 [m]
- omega = 20 1/s
- kierunek obrotu - w lewo
Grupa strukturalna 2, 3 ( 0-0-0 )
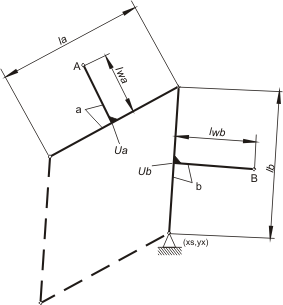
Parametry:
- xs = 0.7; ys = 0
- la = 0.6 [m]
- lb = 0.6 [m]
- lwa = 0.3 [m]
- lwb = 0.001 [m]
- Ua = 0
- Ub = 0
Po ustaleniu wymiarów przeprowadziłem symulację ruchu mechanizmu oraz analizę kinematyczną.
METODA GRAFOANALITYCZNA (METODA PLANÓW)
k1 = 0,001 ![]()
- podziałka rysunkowa mechanizmu.
AB = 0,3 m
BC = 0,6 m
CD = 0,6 m
BF = 0,3 m
FE = 0,3 m
DS3 = 0,3 m
ω1 = 20 s-1
Analiza prędkości.
Prędkość punktu B VB = ω1 * AB = 6 ![]()
Podziałkę prędkości przyjmuję kv = 0,05
Długość wektora prędkości punktu B na rysunku wynosi (VB) = ![]()
=![]()
=120 [mm]
Równanie prędkości punktu C: ![]()
= ![]()
+ ![]()
Równanie prędkości punktu E: ![]()
= ![]()
+ ![]()
![]()
= ![]()
+ ![]()
Plan prędkości:
Rys. 5
VC = 2,012 ![]()
VE = 3,4735 ![]()
VCB = 4,679 ![]()
VEB = 3,3345 ![]()
VEC = 3,3085 ![]()
VS3 = 1,006 ![]()
Na podstawie planu obliczyłem:
ω2 = ![]()
= 7,798 [s-1]
ω3 = ![]()
= 3,353 [s-1]
Analiza przyspieszeń
Przyspieszenie punktu B: aB = ![]()
= ![]()
AB = 120 ![]()
Podziałkę przyspieszeń przyjmuję ka = 2
Długość wektora przyspieszeń punktu B na rysunku wynosi: ![]()
= ![]()
= 60 [mm]
Równanie przyspieszeń punktu C: ![]()
+ ![]()
= ![]()
+ ![]()
+ ![]()
Równania przyspieszeń punktu E: ![]()
= ![]()
+ ![]()
+ ![]()
![]()
= ![]()
+ ![]()
+ ![]()
![]()
= ![]()
= ![]()
CD = 6,747 (![]()
) = 3,37 [mm]
![]()
= ![]()
= ![]()
BC = 36,48 (![]()
) = 18,24 [mm]
![]()
= ![]()
= ![]()
EB = 26,22 (![]()
) = 13,1 [mm]
![]()
= ![]()
= ![]()
EC = 25,81 (![]()
) = 12,9 [mm]
plan przyspieszeń:
Z planu przyspieszeń wynika:
|
Na podstawie planu przyspieszeń obliczyłem:
ε2 =
ε3 =
Na podstawie planu przyspieszeń zaznaczyłem zwroty przyspieszeń kątowych członów 2 i 3 na rys. 8. |
ANALIZA KINEMATYCZNA MECHANIZMU - METODA ANALITYCZNA
PORÓWNANIE WYNIKÓW ANALIZY KINEMATYCZNEJ
ANALIZA KINETOSTATYCZNA
PRZYJĘCIE MAS, MOMĘTÓW BEZWŁADNOŚCI ORAZ SIŁY OPORU
OSWOBODZENIE GRUPY STRUKTURALNEJ OD WIĘZÓW
SPRAWDZENIE POPRAWNOŚCI OBLICZEŃ MOMENTU RÓWNOWAŻĄCEGO METODĄ MOCY CHWILOWYCH
![]()
+ ![]()
+ ![]()
+ ![]()
+ ![]()
= 0
l1cosφ1 + l2cosφ2 + l3cosφ3 + l4cosφ4 + l5cosφ5 = 0 (1)
l1sinφ1 + l2sinφ2 + l3sinφ3 + l4sinφ4 + l5sinφ5 = 0 (2)
Po podstawieniu wartości liczbowych wzory są następujące:
0,3cos45° + 0,6cosφ2 + 0,6cosφ3 - 0,7 = 0
0,3sin45° + 0,6sinφ2 + 0,6sinφ3 + 0,1 = 0
0,6cosφ2 + 0,6cosφ3 - 0,4879 = 0 |:0,6
0,6sinφ2 + 0,6sinφ3 + 0,3121 = 0 |:0,6
cosφ2 + cosφ3 - 0,8132 = 0
sinφ2 + sinφ3 + 0,5202 = 0
cosφ2 - 0,8132 = -cosφ3 |()2 (3)
sinφ2 + 0,5202 = -sinφ3 |()2
cos2φ2 - 1,6264cosφ2 + 0,6613 = cos2φ3
sin2φ2 + 1,0404sinφ2 + 0,2706 = sin2φ3
+
1 - 1,6264cosφ2 + 1,0404sinφ2 + 0,9319 = 1
-1,6264cosφ2 + 0,0404sinφ2 + 0,9319 = 0 |: (-1,6264)
cosφ2 - 0,6397sinφ2 - 0,5729 = 0
Oznaczam A = -0,5729 oraz B = -0,6397
cosφ2 + Bsinφ2 + A = 0
cosφ2 +A = Bsinφ2 |()2
cos2φ2 + 2Acosφ2 + A2 = B2sin2φ2
sin2φ2 = 1 - cos2φ2
cos2φ2 + 2Acosφ2 +A2 - B2(1 - cos2φ2) = 0
cos2φ2 +2Acosφ2 + A2 - B2 +B2cos2φ2 = 0
(1 + B2)cos2φ2 + 2Acosφ2 + (A2 - B2) = 0
Po podstawieniu w = cosφ2 otrzymuję:
[1 +(-0,6397)2]w2 + 2*(-0,5729)w + [(-0,5729)2 - (-0,6397)2] = 0
1,4092w2 - 1,1458w - 0,081 = 0
∆ = 1,7694
![]()
= 1,3302
w1 = ![]()
= -0,0654
w2 = ![]()
= 0,8785
cosφ2(1) = w1
cosφ2(2) = w2
φ2(1) = arccosw1
φ2(2) = arccosw2
φ2(1) = arccos(-0,0654) = 93,44°
φ2(1) = 360° - 93,44° = 266,56°
φ2(2) = arccos(0,8785) = 28,32°
Kąt φ2(1) = 266,56° dotyczy symetrycznego położenia mechanizmu (linią przerywaną) względem osi przechodzącej przez punkty B i D.
Kąt φ3 wyliczam na podstawie równania (3):
cosφ3(1) = 0,8132 + 0,0654 = 0,8786
cosφ3(2) = 0,8786 = -0,0654
φ3(1) = 28,32°
φ3(2) = 266,56°
Po zróżniczkowaniu równania (1) otrzymuję
-ω1l1sinφ1 - ω2l2sinφ2 - ω3l3sinφ3 = 0 (4)
gdzie ω1 = ![]()
; ω2 = ![]()
; ω3 = ![]()
ω1l1sin(φ1 - φ2) + ω2l2sin(φ2 - φ2) + ω3l3sin(φ3 - φ2) = 0
ponieważ ω2l2sin(φ2 - φ2) = 0 to mogę obliczyć
ω3 = -![]()
po podstawieniu danych liczbowych jest
ω3 = -
= 3,35 [s-1]
Analogicznie obracając układ współrzędnych o kąt φ3 otrzymuję
ω1l1sin(φ1 - φ3) + ω2l2sin(φ2 - φ3) + ω3l3sin(φ3 - φ3) = 0
ω3l3sin(φ3 - φ3) = 0
ω2 = -![]()
po podstawieniu danych liczbowych jest
ω2 = -
= -7,8 [s-1]
W celu obliczenia przyspieszeń kątowych różniczkuję równanie (4) przyjmując ω1 = const
ω12l1cosφ1 + ω22l2cosφ2 + ε2l2cosφ2 + ω32l3cosφ3 +ε3l3sinφ3 = 0
Przyspieszenie kątowe członu 3 otrzymuję obracając układ współrzędnych o kąt φ2
ε3 = -
po podstawieniu danych liczbowych jest:
ε3 = -
ε3 = 291,727 [s-1]
Przyspieszenie kątowe członu 2 otrzymamy obracając układ współrzędnych o kąt φ3
ε2 = -
po podstawieniu danych liczbowych jest:
ε2 = -
ε2 = -209,78 [s-1]
|
|
AKM |
Met. Wykreślna |
Met. analityczna |
1 2 3 4 5 6 7 8 9 10 |
VC
VE ω2 ω3 aC aE aS3 ε2 ε3 |
3,46 1,07 7,75
189,63 83,24 198,48
|
2,012 3,4735 1,006 7,8 3,35 175,14 195,26 87,57 203 293,43 |
- - - 7,8 3,35 - - - 209,78 291,727 |
m3 = 4 [kg]
Is3 = ![]()
= ![]()
= 0,12 [kgm2]
Przyjmuję siłę zewnętrzną P2 = 200 [N]
3.2 OBLICZENIE SIŁ I MOMENTÓW OD SIŁ BEZWŁADNOŚCI
Obliczam siłę bezwładności ![]()
oraz moment od sił bezwładności ![]()
![]()
= -m3![]()
B3 = m3![]()
= 4 * 87,57 = 350,28 [N]
![]()
= -IS3![]()
![]()
= IS3ε3 = 0,12*291,727 = 35 [Nm]
Podziałka k1 = 0,01 ![]()
Równania równowagi sił zewnętrznych i reakcji działających na człony grupy strukturalnej (2, 3)
![]()
+ ![]()
+ ![]()
+ ![]()
+ ![]()
+ ![]()
= 0
W celu wykreślnego rozwiązania równania należy wyznaczyć składowe styczne:
![]()
= 0; -ε![]()
* BC + P2u = 0
![]()
= ![]()
Po podstawieniu wartości liczbowych:
![]()
= ![]()
= 135,62 [N]
![]()
= 0; -![]()
* CD - MB3 + B3h = 0
![]()
= ![]()
Po podstawieniu wartości liczbowych
![]()
= ![]()
= 117,37 [N]
Wykreślne rozwiązanie równania równowagi sił.
Przyjąłem podziałkę kR = 5 ![]()
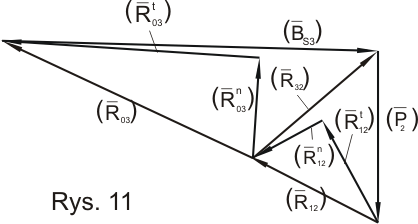
(![]()
) = 27,124 [mm]
(![]()
) = 23,474 [mm]
(B3) = 70 [mm]
(P2) = 40 [mm]
Z rysunku odczytuję:
(R12) = 32,79 [mm]
R12 = 163,95 [N]
(R03) = 64,47 [mm]
R03 = 322,35 [N]
Na podstawie równania równowagi sił dla członu 2 wyznaczam również reakcję R32
![]()
+ ![]()
+ ![]()
= 0
(![]()
) = 38,38 [mm]
![]()
= 191,9 [N]
Analiza sił działających na człon napędzający:
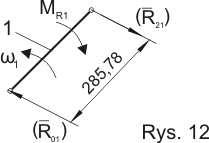
Równania równowagi sił:
![]()
+ ![]()
= 0
![]()
= - ![]()
![]()
= 163,95 * 0,28578
![]()
= 55,427 [N]
Obliczenie momentu równoważącego MR1
MR1 - R21l1 = 0
MR1 = R21l1
MR1 = 163,95 * 0,28578 = 55,427031 [Nm]
![]()
MR1(spr) ω1 + P2VEcos(α2) + B3VS3cos(α3) + MB3 ω3 = 0
MR1(spr) = -![]()
Po podstawieniu danych liczbowych
MR1(spr) = -![]()
MR1(spr) = -56,5058 [Nm]
Znak (-) momentu równoważącego oznacza, że zwrot jest przeciwny do zwrotu prędkości kątowej członu 1 (jest to moment hamujący). Otrzymana wartość momentu równoważącego w porównaniu z momentem obliczonym na drodze analizy kinetostatycznej wskazuje, że obliczenia zostały wykonane poprawnie.
Wyszukiwarka
Podobne podstrony:
blabla2, Mechatronika AGH IMIR, rok 2, sprawozdania, TMM
Dynamiczne badanie przetworników I i II rzędu, Mechatronika AGH IMIR, rok 2, sprawozdania, metrologi
metrologia 78, Mechatronika AGH IMIR, rok 2, sprawozdania, metrologia
TMIM, Mechatronika AGH IMIR, rok 2, sprawozdania
PKM WAŁ, Mechatronika AGH IMIR, rok 2, sprawozdania, wałek
Sprawko metro, Mechatronika AGH IMIR, rok 2, sprawozdania, metrologia, METROLOGIA
własności dynamiczne przetworników pierwszego rzędu 2, Mechatronika AGH IMIR, rok 2, sprawozdania, m
TMM - Projekt 6B(1), Mechatronika AGH IMIR, rok 2, TMM, 1A, 2A, 3A, 4B, 5B, 5A, 6A, 7B
TMM 3Aa, Mechatronika AGH IMIR, rok 2, TMM, 3a projekt TMM
5A schabu, Mechatronika AGH IMIR, rok 2, TMM, 1A, 2A, 3A, 4B, 5B, 5A, 6A, 7B
charakterystyki 2 2, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
metr-koło 4, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
STAT.KONTR.JAKOŚCI, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
sciaga 2(1), Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
wnioski 2 2, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
Tmm sprawko 1, Mechatronika AGH IMIR, rok 2, TMM
tablice terrma2, Mechatronika AGH IMIR, rok 2, TMM, tmm
więcej podobnych podstron