 | Pobierz cały dokument blabla2.mechatronika.agh.imir.rok.2.doc Rozmiar 899 KB |
Wydział Inżynierii Mechanicznej i Robotyki
TEORIA MASZYN I MECHANIZMÓW PRECYZYJNYCH
ANALIZA MECHANIZMU 1A
Marcin Matras, grupa 25, Mechatronika
Temat zadania:
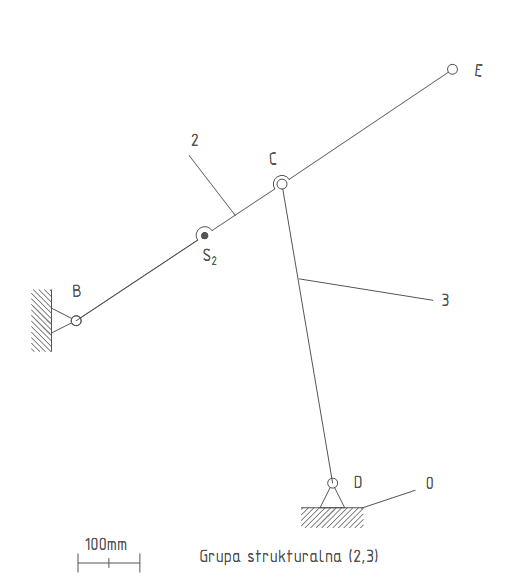
Utworzono mechanizm czworoboku przegubowego zgodnie z zadanym schematem
dane:
m2=6kg
JS2=0,5833kg*m2
P2=150N
M3=150Nm
![]()
=![]()
1. ANALIZA STRUKTURALNA MECHANIZMU
![]()
![]()
![]()
![]()
Ruchliwość mechanizmu jest równa 1.
Mechanizm jest klasy V.
![]()
![]()
![]()
n=2
p5=3
wgr=0
grupa strukturalna klasy 2
Analizowany łańcuch kinematyczny jest mechanizmem kl. 2
2.ANALIZA KINEMATYCZNA MECHANIZMU METODĄ GRAFOANALITYCZNĄ
Obliczenia:
kv = 
-podziałka prędkości

- kierunek wektora prostopadły do |AB|
Obliczam prędkość punktu C:
![]()
(1) VC- ┴ |CD|; VB- ┴ |AB|; VCB- ┴ |BC|
![]()
(2) VEB- ┴ |BE|
PLAN PRĘDKOŚCI:
Obliczono prędkości:
VE= k*( VE)=2,757 [m/s]
VC= k*( VC)=2,033 [m/s]
VS2= k*( VS2)=3,024 [m/s]
VCB= k*( VCB)=2,97 [m/s]
VEB= k*( VEB)=5,77[m/s]
VS2B= k*( VS2B)=2,09 [m/s]
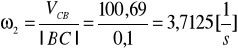
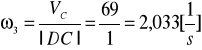
Obliczono prędkośc kątowe poszczególnych członówi:
WYZNACZANIE PRZYSPIESZEŃ:
Obliczono aB, aC, aCB:
![]()
![]()
![]()
Równanie przyspieszeń punktu C:
![]()
,![]()
║ CD; ![]()
┴ CD ; ![]()
║ AB; ![]()
║ BC ; ![]()
┴BC
Z planu odczytano:
![]()
![]()
![]()
Równanie przyspieszenia punktu E:
![]()
(3) ![]()
║ EB; ![]()
┴ EB
![]()
![]()
Z planu odczytano:
![]()
Równanie przyspieszenia punktu S2:
![]()
(3) ![]()
║ BC; ![]()
┴ BC
![]()
![]()
Z planu odczytano:
![]()
Obliczono przyspieszenia kątowe:
![]()
![]()
![]()
3.ANALIZA KINEMATYCZNA METODĄ ANALITYCZNĄ
3.ANALIZA KINEMATYCZNA PRZY POMOCY PROGRAMU SAM
3.1 Utworzono mechanizm w programie SAM
 | Pobierz cały dokument blabla2.mechatronika.agh.imir.rok.2.doc rozmiar 899 KB |