08
Wyznaczenie początku układu dla krzywej siły gnącej P' zarejestrowanej przez dynamometr pokazano na rys. 4.4. Krzywa ta, po odpowiednim dostosowaniu podzia-łek na osi odciętych i rzędnych, przedstawia również zależność między umownym naprężeniem gnącym ogi a względną krzywizną g/p elementów giętych.
1.2. Kształt linii ugięcia
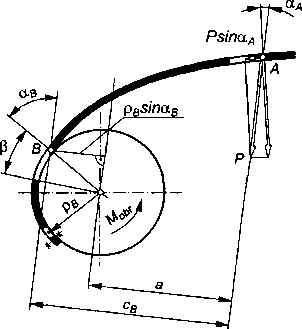
Rys. 4.5. Schemat procesu owijania blachy
Określony zostanie kształt linii plastycznie wyginanego paska blachy, charakterystyczny dla wszystkich operacji gięcia, które schematycznie można przedstawić za pomocą jednostronnie zamocowanej belki obciążonej na końcu siłą skupioną. Do takich operacji należą: wyginanie i zaginanie na prasach oraz owijanie.
Pod działaniem siły skupionej znaczna część odcinka paska blachy zawarta między punktami zamocowania i przyłożenia siły odkształcą się plastycznie, przyjmując kształt elementu o zmieniającej się krzywi-źnie. Aby wyznaczyć zależność określającą kształt tego odcinka, wystarczy rozpatrzyć np. bilans pracy stacjonarnego procesu owijania paska blachy na walcowym wzorniku o dowolny kąt P, wyrażony w mierze łukowej (rys. 4.5). W skład tego bilansu wchodzą:
A#obr P — praca momentu obrotowe-
g°Mobr’
Psinai4(pBP) — praca składowej stycznej siły P,
Ms$k — praca odkształcenia plastycznego, potrzebna do nadania krzywizny
l/p, odcinkowi paska o długości pP; współczynnik wypełnienia wykresu krzywej gięcia dla materiału owijanej blachy wynosi A,. Jeżeli kierunek działania siły P jest taki, jak przyjęto na rys. 4.5, to rozpatrywany bilans przyjmuje postać:
M0brp + Psin ot^ (pB P) = Mb pX. (4-18)
Wyrażając moment obrotowy Afobr i moment gnący MB przez siłę P działającą na odpowiednich ramionach, otrzymuje się zależność
P(cB ~ Pflsin aB) + ^sin aA pB = PcBX ,
a z niej po przekształceniu, szukane równanie:
(4.19)
' “ cB ~ ~1
■ sin aB - sin aA = — (1 - X)\
L _____________________ _____i
Wyszukiwarka
Podobne podstrony:
elektrotechnika II0004 2. Wyznaczenie mocy P. O, S dla obwodu szeregowego Po połączeniu obwodu w spo
img029 Reakcje w poszczególnych belkach pokazano na rys.I.57b. Następnie wyznaczom siły wewnętrznie
Slajd27 .w (= r X r) F (przesunięte do początku układu współrzędnych) ■yMoment siły M = fxF =
skanuj0006 12.5. Przykłady Przykład 12.1 Rozpatrzmy ramę pokazaną na rys. 12.13a, wyznaczmy momenty
Mechanika ogolna0068 136Przykład 19 Dla układu mechanicznego pokazanego na rys. 79 określić równowag
73568 skanuj0006 12.5. Przykłady Przykład 12.1 Rozpatrzmy ramę pokazaną na rys. 12.13a, wyznaczmy mo
Strona0034 34 Przykład 2.4 Wyznaczymy częstość drgań własnych układu pokazanego na rys. 2.8, gdzie w
13090 strona064 64 4. WYMIAROWANIE Początek układu współrzędnych oznacza się kropką. Liczby wymiarow
new nalepka 2 I Wyznacz dopuszczalną wartość siły P. jaką może przenieść konstrukcja przedstawiona n
Image446 Funkcję, która ma być spełniona przez układ przedstawiono na rys. 4.538a, natomiast symbol
img021 2 Zadanie 1.31. Wyznaczyć reakcje oraz sporządzić wykresy sił wewnętrznych w belce pokazanq n
Skrypt PKM 1 00070 140 Odpowiedź: Dla d = 18 [ram], />m„ = 64,75 [N/mm2] < p^. Zadanie 3.30 Wy
więcej podobnych podstron