20121218276
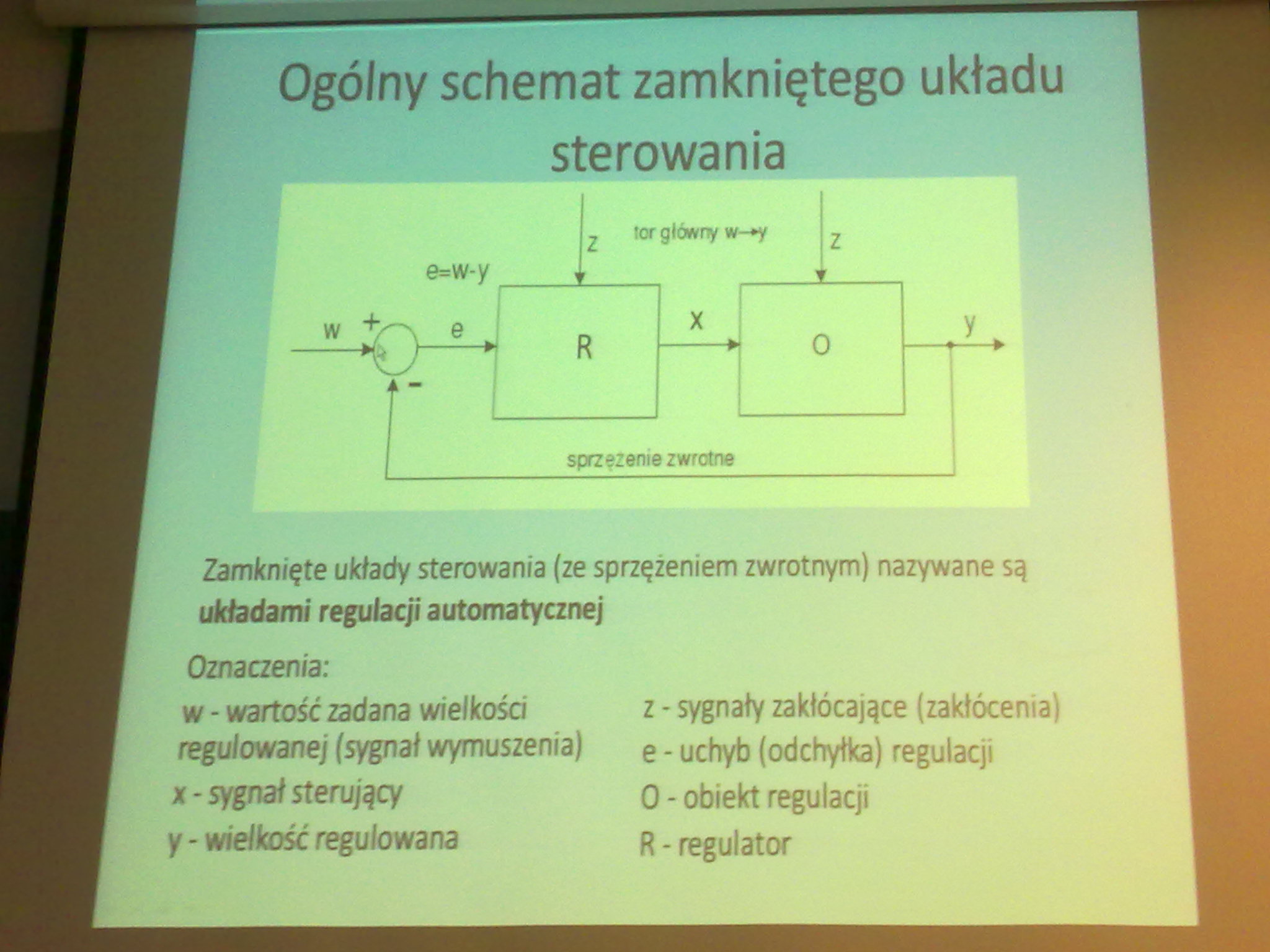
Ogólny schemat zamkniętego układu sterowania
|
e=w-y |
2 tor główny w-+y |
Z | |||||
|
R |
X |
c |
\ |
y. | |||
|
V |
; | ||||||
|
sprzężenie zwrotne | |||||||
Zamknięte układy sterowania (ze sprzężeniem zwrotnym) nazywane są układami regulacji automatycznej
Oznaczenia:
w - wartość zadana wielkości regulowanej (sygnał wymuszenia) x-sygnał sterujący y-wielkość regulowana z - sygnały zakłócające (zakłócenia) e - uchyb (odchyłka) regulacji O - obiekt regulacji R - regulator
Wyszukiwarka
Podobne podstrony:
A Zad. I.ou) Rysunek przedsUW.u schemat zamkniętego układu sterowania ze sterownikiem proporcjonalny
Zadanie 5b. (6p)D(s) Rysunek przedstawia schemat zamkniętego układu sterowania z sterownikiem
A Zad. I.ou) Rysunek przedsUW.u schemat zamkniętego układu sterowania ze sterownikiem proporcjonalny
Rys. 1. Ogólny schemat prostego układu sterowania przepływem produkcji Analizując system sterowania
A Zad. I.ou) Rysunek przedsUW.u schemat zamkniętego układu sterowania ze sterownikiem proporcjonalny
Poprawa ISD wrzesien 2 grupa A A Zad. 1. D(S) Rysunek przedstawia schemat zamkniętego układu ste
id1 Zadanie 4a. (6p) Dis) Rysunek przedstawia schemat zamkniętego układu sterowania z sterownikiem
Wprowadzenie do podstaw automatyki Rysunek 1.4. Schemat blokowy zamkniętego układu sterowania (układ
Rys. 4. Schemat ideowy układu sterowania
HPIM8006 OjWny schemat blokowy układu sterowania numerycznego obrabiarki
Ogólny schemat otwartego układu
19082 Wagony kolejowe i hamulce (163) “• * U5SRys. 9.5. Sch
więcej podobnych podstron