Image179
Urządzenie działa w sposób sekwencyjny, w takt impulsów taktujących. Informacja wyjściowa (mikrooperacja) zmienia się raz na jeden cykl (takt). Słowo wyjściowe matrycy pamięci składa się z dwóch podstawowych części. Pierwsza określa adres następnej mikroinstrukcji z uzależnieniem warunkowym, druga natomiast określa mikroinstrukcje sterujące. Długość części pierwszej słowa wyjściowego z pamięci ogranicza liczbę możliwych adresów następnych mikroinstrukcji, natomiast długość drugiej części słowa wyjściowego z pamięci określa liczbę i rodzaj rozkazów wykonawczych. Jest ona zwykle podzielona na grupy, w których umieszczone są wzajemnie wykluczające się mikrooperacje sterujące. Mikroprogramowane urządzenie sterujące działa w sposób cykliczny. W ramach każdegu cyklu następuje:
— wygenerowanie słowa wyjściowego z pamięci z dokonaniem ewentualnej modyfikacji adresu słowa pamięci,
— przekazanie do układów wykonawczych danych określających następną mikrooperację sterującą.
Podobne rozwiązanie mikroprogramowanego urządzenia sterującego przedstawiono na rys. 4.141. Funkcję rejestru adresowego spełnia tu licznik, wyzna-
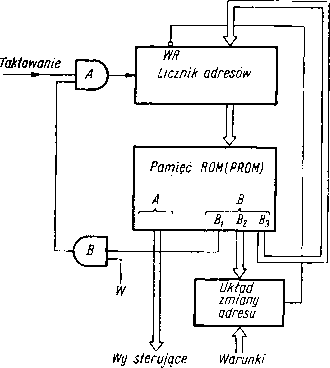
Rys. 4.141. sterującego
Schemat ideowy urządzenia z licznikiem zewnętrznym
czający w sposób sekwencyjny kolejne adresy pamięci. Część B słowa, sterująca adresowaniem, podzielona jest na trzy grupy:
— Bx — wpływającą na zatrzymanie cyklu taktowania pamięci, aż do spełnienia
warunku W (stop w programie),
— B2—adresująca układ zmiany adresu (najczęściej multipleksery), na który
podawane są uzależnienia zewnętrzne,
— B3 — stanowiąca adres skoku.
W prostych urządzeniach sterujących o nieskomplikowanej strukturze logicznej mogą być stosowane rozwiązania uproszczone, z wykorzystaniem pamięci ROM oraz układów średniej skali integracji TTL. Zastosowanie zewnętrznego
189
Wyszukiwarka
Podobne podstrony:
Image13 Omów działanie pętli: a!j ytszi&ijśi 2.’ W f
Image160 kości działania. Pamięci wykonane w technologii ECL o pojemności 1 kbita cechują się czasem
Image272 licznika (rys. 4.304c) w taki sposób, żeby uzyskać prawie równomierny rozkład impulsów w cz
Wymaga się obecnie, by wysypiska były urządzane w taki sposób, aby minimalizowały zagrożenia i
IMGu33 176 p 1. Strony są prawidłowo utworzone i działają w sposób woźny i skutecz
IMGd72 KOD GENETYCZNY ; określa, w jaki sposob sekwencja i nukleotydów w mRNA jest ! tłumaczona
ustne, projekty indywidualne 4 Słuchacz potrafi myśleć i działać w sposób
Karta pracy 3.4: Które systemy ogrzewania działają w sposób zrównoważony?_ Karta pracy 3.1: Które sy
Ćwiczenie 3.4: Które systemy ogrzewania działają w sposób zrównoważony?_ Ćwiczenie 3.4: Które system
92 Urządzenia, narzędzia i sposoby wykonywania wierceń obrotowych i udarowych, ze szczególnem
Zasada działania, sposoby egzekucji programów sterujących. Środowisko programowe obsługi sterowników
Ocena ryzyka w transporcie kolejowym materiałów niebezpiecznych, cz. I - metodyka wią urządzenia, dz
7ao«wU Turnera-lecze nie despot 1 llHICla • iMałe dawki rslrogriiów (I 4 dawki sposobtTii sekwencyjn
więcej podobnych podstron