Image241
B =i

nxn
nxr
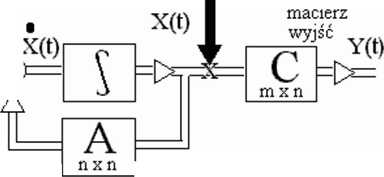
zmiany wektora wejść nie wywołują zmian wszystkich zmiennych stanu
X(t) macierz wyjsc
A
macierz wejść
u=ą>i
Układ me sterowalny ale ob serwowalny macierz
\ c =0=
*-> mxn stanu
macierz wejsc
|
R |
-N+/ |
|
JJ nxr |
Układ me ob serwo walny ale sterowalny macierz
zmiany wektora stanu nie wywołują zmian wszystkich zmiennych I wyjścia
stanu
Wyszukiwarka
Podobne podstrony:
macierz wejść , zmiany wektora wejść me wywołują zmian wszystkich zmiennych stanu =C*7F[>= Układ
Image242 zmiany wektora wejść nie wywołują zmian zmiennych stanu zmiany wektora stanu nie wywołują
21. Dlaczego pojemność diody nie jest liniową funkcją napięcia? Zmiany napięcia na diodzie wywołują,
21. Dlaczego pojemność diody nie jest liniową funkcją napięcia? Zmiany napięcia na diodzie wywołują,
Foto0244 NEUROLEPTYK! i Neuroleptyki atypowe w porównaniu z klasycznymi neuroleptykami nie wywołują
Image233 Jeżeli funkcje przełączające dla wejść J i K zostaną przekształcone w następujący sposób: j
Image345 Implementacje funkcji (1) i (2) przedstawiono na rys. 4.394. W układach tych, jeśli żadne z
skanuj0006 dużych dawkach, zazwyczaj nie wywołuje zaburzeń ze strony układu krążenia (wzrostu lub sp
Praktyka dowodzi też, że kąt przyłożenia czujnika mniejszy niż 15° nie wywołuje istotnych sił boczny
Łożyska toczne - nośność Nośność spoczynkowa (C0) - obciążenie łożyska, które nie wywołuje
IMGA40 małe świnki reprezentują fazy ludzkiego rozwoju zniknięcie dwu pierwszych nie wywołuje u
Microsoft Word f Czy chcesz zapisać zmiany w pliku Dokument! ? Nie wiem I Byc może I Zastanawiam Je
fajn pier22 rtan nie wywołuje alergii i może używany do przekłuwania ciała.
copyright © 2010 Grupa dr. A. R. Kwiecińskiego ISSN 1425-5073 [25.26]). jednak nie wywołuje tak nasi
więcej podobnych podstron