image3 1 jpeg
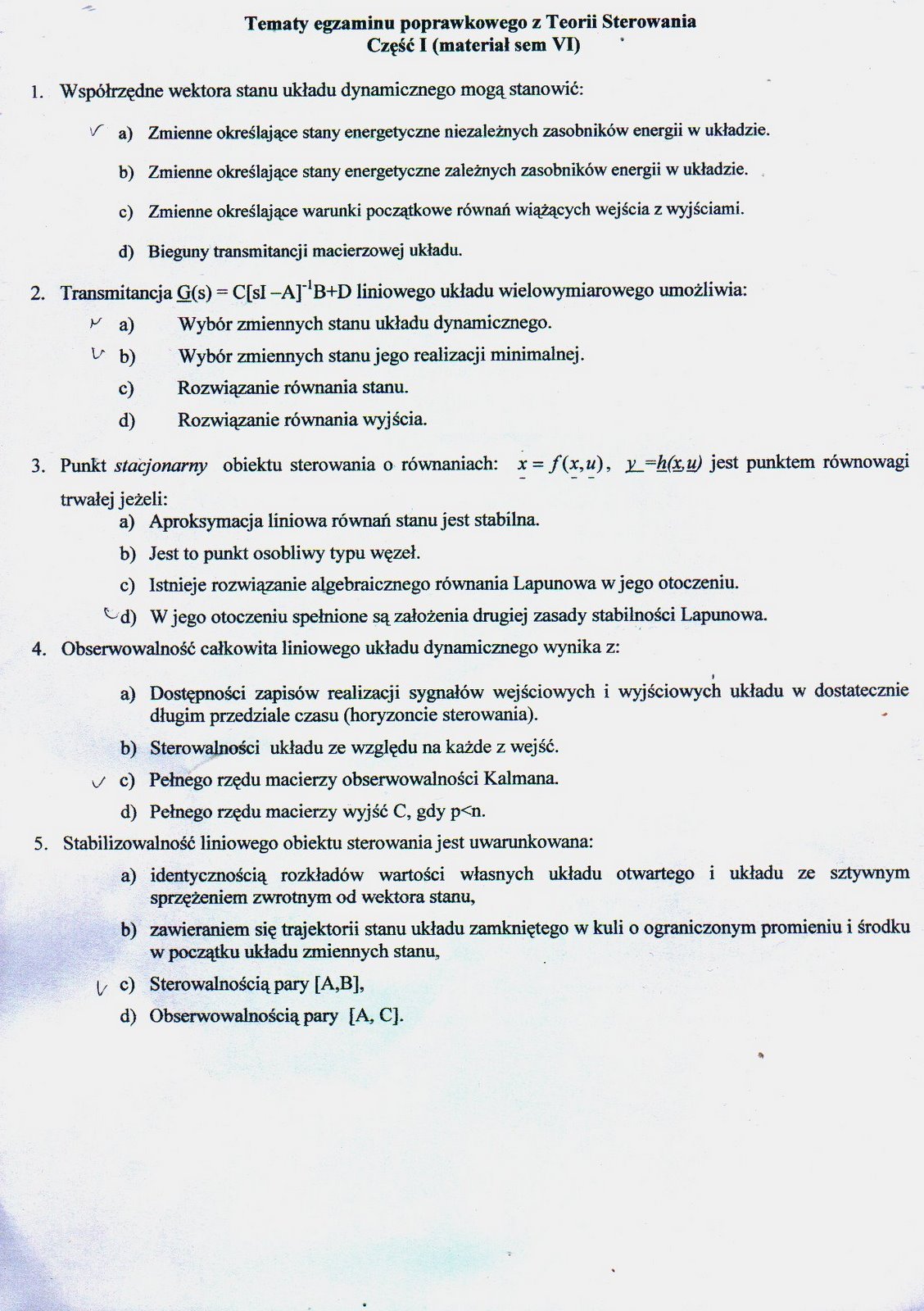
Tematy egzaminu poprawkowego z Teorii Sterowania
Część I (materiał sem VI)
1. Współrzędne wektora stanu układu dynamicznego mogą stanowić:
a) Zmienne określające stany energetyczne niezależnych zasobników energii w układzie.
b) Zmienne określające stany energetyczne zależnych zasobników energii w układzie.
c) Zmienne określające warunki początkowe równań wiążących wejścia z wyjściami.
d) Bieguny transmitancji macierzowej układu.
2. Transmitancja G(s) = C[sl -A]'*B+D liniowego układu wielowymiarowego umożliwia:
v a) Wybór zmiennych stanu układu dynamicznego.
V b) Wybór zmiennych stanu jego realizacji minimalnej.
c) Rozwiązanie równania stanu.
d) Rozwiązanie równania wyjścia.
3. Punkt stacjonarny obiektu sterowania o równaniach: x = f{x,u), y_=h(x,u) jest punktem równowagi trwałej jeżeli:
a) Aproksymacja liniowa równań stanu jest stabilna.
b) Jest to punkt osobliwy typu węzeł.
c) Istnieje rozwiązanie algebraicznego równania Lapunowa w jego otoczeniu.
^ d) W jego otoczeniu spełnione są założenia drugiej zasady stabilności Lapunowa.
4. Obserwowalność całkowita liniowego układu dynamicznego wynika z:
a) Dostępności zapisów realizacji sygnałów wejściowych i wyjściowych układu w dostatecznie długim przedziale czasu (horyzoncie sterowania).
b) Sterowalności układu ze względu na każde z wejść.
\j c) Pełnego rzędu macierzy obserwowalności Kalmana.
d) Pełnego rzędu macierzy wyjść C, gdy p<n.
5. Stabilizowalność liniowego obiektu sterowania jest uwarunkowana:
a) identycznością rozkładów wartości własnych układu otwartego i układu ze sztywnym sprzężeniem zwrotnym od wektora stanu,
b) zawieraniem się trajektorii stanu układu zamkniętego w kuli o ograniczonym promieniu i środku w początku układu zmiennych stanu,
(/ c) Sterowalnością pary [A,B],
d) Obserwowalnościąpary [A, C].
Wyszukiwarka
Podobne podstrony:
s0036 Egzamin poprawkowy z Teorii Sygnałów - część zadaniowa 1. Sprawdzić, wyznaczając odpowiednie
image2 1 jpeg Tematy egzaminacyjne z Teorii Sterowania) Część II (materiał sem VII) 1. &
image0 jpeg «•* r.ak. 2004/2005 3.03.2005EGZAMIN POPRAWKOWY Z TEORII STEROWANIA1.
poprawkowy20xx (2) Egzamin poprawkowy z Teorii Sygnałów (J) Proszę obliczyć okres sygnału /(/) = cos
ts egz p EGZAMIN POPRAWKOWYZ TEORII SYGNAŁÓW 22 września 2000 (Każde zadanie musi być rozwiązan
poprawka Egzamin Poprawkowy z Teorii Obwodów II sem. 22.09 2003 1) Przyjmując jako odniesienie prąd
s0021 EGZAMIN POPRAWKOWY Z TEORII SYGNAŁÓW 22 września 2000 (Każde zadanie musi być rozwiązane
s0052 Egzamin Poprawkowy z Teorii Sygnałów l. Na rysunku pokazano sygnał o nieskończonej energii. Wy
004 (18) A. Egzamin poprawkowy z matematyki dla studentów I Energetyki w sem. II. Pytania z teorii.
więcej podobnych podstron