IMG068
Rozwiązaniem Jego Jest zależność:
R - \ (6.14)
Łatwo obliczyć, że w przypadła: dopasowania, moc wydzielająca się na R Jest równa mocy traconej na R^. Sprawność źródła Jest więc równa w tym przypadku tylko 50%.
6.2.3« Zasada superpozycji
Liniowy obwód elektryczny podobnie Jak każdy liniowy układ fizyczny spełnia zasadę superpozycji. Zasadę tę można sformułować następująco: odpowiedź liniowego obwodu elektrycznego zawierającego kilka źródeł,
Jest równa algebraicznej sumie odpowiedzi pochodzących od każdego ze źródeł działającego z osobna. Rysunek 6.7 ilustruje poglądowo zasadę superpozycji. Zgodnie z nia prądy i napięcia w badanym obwodzie (rys. 6.7a) możemy obliczyć jako sumy odpowiednich prądów i napięć w obwodach pokazanych na rysunkach 6.7b 1 6.7c. Jako wynik otrzymujemy:
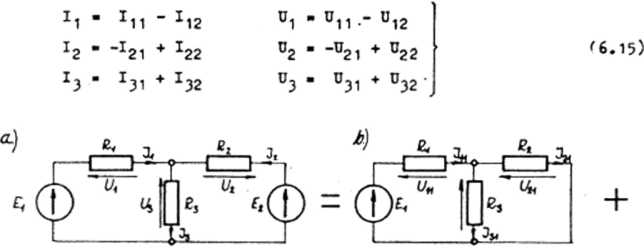
+
y—L-----h
n

Rya. 6,7. Ilustracja zasady superpozycji
Wyszukiwarka
Podobne podstrony:
s62 63 02 2. Dziedziną funkcji jest zbiór D = ( — 1,0) U (0, oo). Łatwo zauważyć, że 02 lira X —>
513 § 5. Krzywizna krzywej płaskiej Tutaj r ,= — asinfl, r£=—a cos 0. Łatwo obliczyć, że r2 + r ,2 =
STEROWANIE SILNIKAMI KROKOWYMI REZONANS Prąd powodujący rotację w danym kierunku możemy łatwo oblicz
172 2 342 XVII. Całki funkcji niewymiernych Łatwo obliczyć, że = lnx-+j x2-2x. dx y/x2-2x Mamy więc
4. Zasada skargawości Zasada skaigowości wyrażona jest w art. 14, który stanowi, że wszczęcie
DSC00297 (7) Oh taboru z przechylnym nadwoziem najbardziej ntetorzynny będzie przypadek o«. łatwo wy
83624 skanuj0427 skąd 2 d sind = nX Łatwo stwierdzić, że w przypadku odbicia Bragga spełnione są war
570 XIV. Całki zależne od parametru Łatwo jest sprawdzić te wyniki obliczając bezpośrednio
Rys. 14. Ręczy zawór hamulcowy2.9. Zawór korygujący Zadaniem jego jest redukcja siły hamowania osi
więcej podobnych podstron