img172
1?2 ćatnich i ujemnych, bez konieozności dokonywania odczytu przy poziomej ccii celowej*
Krąg piono7.-y noże zajmować dwa położenia względem kierunku osi celowej okular - obiektyw, a mianowicie może znajdować się z prawej strony lunety, co oznaczany jako krąg prawy KP, lub z lewej strony, co oznaczany jako krąg lewy KL (rys. 184) . Aby zmierzyć kąt pionowy, należy zapoznać się z rodzajem opisu danego kręgu pionowego 1 sposobem umieszczenia aa teodolicie libeli wyznaczającaj poziome ramię mierzonego kąta.
Najczęściej są spotykane następujące trzy opisy podziału kręgu pionowego: a) podział ciągły (bieżący) 0° - JSO°,•prawy,' czyli zgodny z ruchem wskazówek zegara, b) podział ćwiartkowy (czterokierunkowy) 0° — 30°, c) podział ciągły (bieżący) 0° - 560°, lewy, czyli w kierunku przeciwnym do ruchu wskazówek zegara. Przy podziale gradowym wystąpią tu o odpowiednio wartości 0G, 1006, 'iOGs.
Indeksy a.Iliady kręgu pionowego są zwykle oznaczone numerami X i II lub IJUr-ni A i B.
lepszego zrozumienia teorii kręgu pionowego przedstawimy takie obrazy kręgu, jakie zachodzą przy poszczegćln*m podziale oraz błędzie
AlidękSU i*
*) Podział ciągły, prawy 0° - 3Ć0° (rys 184). Przy poziomym położeniu lunety odczyt EV względem indeksu I wynosi przy KP 0°, a przy 3X , '■<80°. A-cdaussąc obiektyw lunety n górę od horyzontu, otrzymujemy kąt wy*
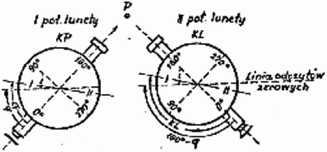
Sfre, 184
r.ckoścd dodatni przy KP bezpośrednio z odczytu ińdeksu X, zaś przy KL jako dopełnienie odczytu indeksu I do 180° (rys, 184), Jeżeli natomiast pochylamy obiektyw poniżej, horyzontu, to wyznaczamy kąt wysokości ujemny (::ąt depresji), którego wartość bezwzględna przy KP jest dopełnieniem odczytu indeksu I do 360°, zaś przy KL - odczytem indeksu I zmniejszonym o 10oc. Odczyty indeksu II dadzą w obydwu przypadkach wartość różną o 1ó0° w stosunku do odczytów indeksu X*
uak widać (rys, 184), po wycelowania do punktu P doćatrią wartością kąta pionowego ^ będzie relacja przy odczycie KP
Wyszukiwarka
Podobne podstrony:
img172 (7) 172 ćatnich i ujemnych, bez konioozności dokonywania odczytu przy poziomej cni celowej* K
img172 (7) 172 ćatnich i ujemnych, bez konioozności dokonywania odczytu przy poziomej cni celowej* K
img172 (7) 172 ćatnich i ujemnych, bez konioozności dokonywania odczytu przy poziomej cni celowej* K
g) przy poziomej osi celowej, pionowej osi obrotu instrumentu oraz poziomej osi libeli kolimacyjnej
Z tablic rozkładu chi-kwadrat odczytujemy wartość statystyki X odczytaną przy poziomie istotności a
Wyjście bez drukowania Zmiana strony przy wydrukach wielostronicowych Podgląd jednej
SPIS2 TIF Ostrożność przy wybieraniu typów ze znakiem lub bez znaku................ 41 Ostrożność pr
SPIS2 TIF Ostrożność przy wybieraniu typów ze znakiem lub bez znaku................ 41 Ostrożność pr
SPIS2 Ostrożność przy wybieraniu typów ze znakiem lub bez znaku................ 41 Ostrożność przy ł
Bez nazwy 1(5) PORADY BABUNI PRZY KŁOPOTACH Z GARDŁEM LUB NOSEM MOŻESZ WYKORZYSTAĆ SILNIE DEZYNFEKUJ
CCF20080704�004 Pole tolerancji charakterystyki zapis-odczyt przy prędkości 4,75 cm/s zbyt dużym spa
Błąd miejsca zero (błąd indeksu) Definicja: Przy poziomym położeniu osi celowej, odczyt z kręgu
- ruchy szczęki jw ale bez uwidocznionych zębów - jak przy ośnym „am”; »rowa - naśladowanie żucia pr
Logistyka - nauka oraz paliwa gazowego dokonywany jest przy pomocy gazomierzy rotorowych COMMON CGR-
20071109061609697�07 20 wzrost wydłużenia rozciąganej próbki (przy zmniejszonym, bez wzrostu, łub na
więcej podobnych podstron